Witam,
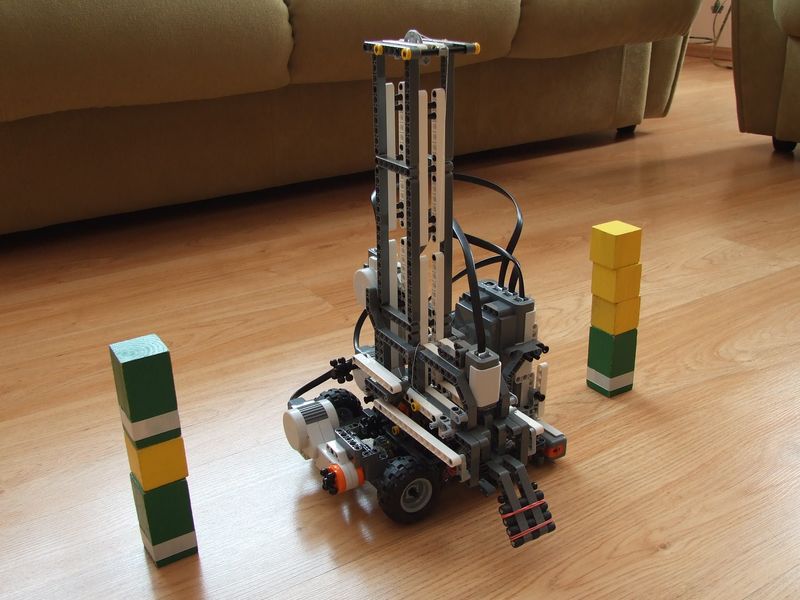
Oto druga wersja robota układającego drewniane klocki. Kompletnie przeprojektowana i usprawniona. Działa dużo sprawniej, porusza się szybciej a precyzja jest zadowalająca.
Ramowy algorytm działania:
1. Najpierw skanuje sobie klocki, aż przestanie na jakiekolwiek natrafiać
2. Po kolei układa z nich wieżę zliczając jej aktualną wysokość
3. Kiedy uzna, że wyżej już nie da się budować, stawia kolejną wieżę obok
4. Jak skończy to "parkuje" obok swojego dzieła
Wielkich tajemnic konstrukcyjnych tutaj nie ma. To co jest widać doskonale na zdjęciach oraz na filmie. Soft napisany w NXC - mogę wysłać na maila, jeśli kogoś interesuje.
Zapraszam do komentowania.
Inne fotki:

Pełna galeria
Film:
[youtube]http://www.youtube.com/watch?v=3LA63cKbnm8[/youtube]