
Język: ROBOTC
Kostki: 2
Silniki: 5 x NXT
Sensory: 2 x dotyk
Prosty pilot pozwalający przez łącze Bluetooth kontrolować jedną kostką silniki podłączone do drugiej kostki. Nic specjalnego, bo niektórzy trialowcy robili takie rzeczy już lata temu i nawet nie uznali za stosowne się tym pochwalić ;) ale na czymś muszę się uczyć.
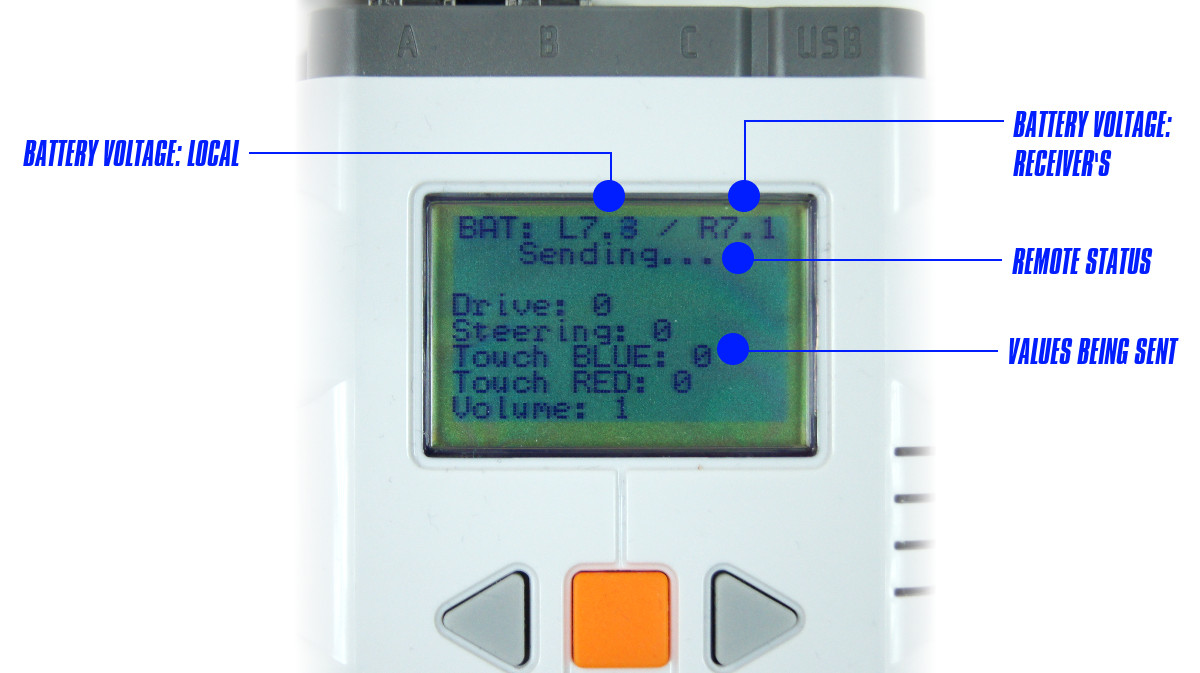
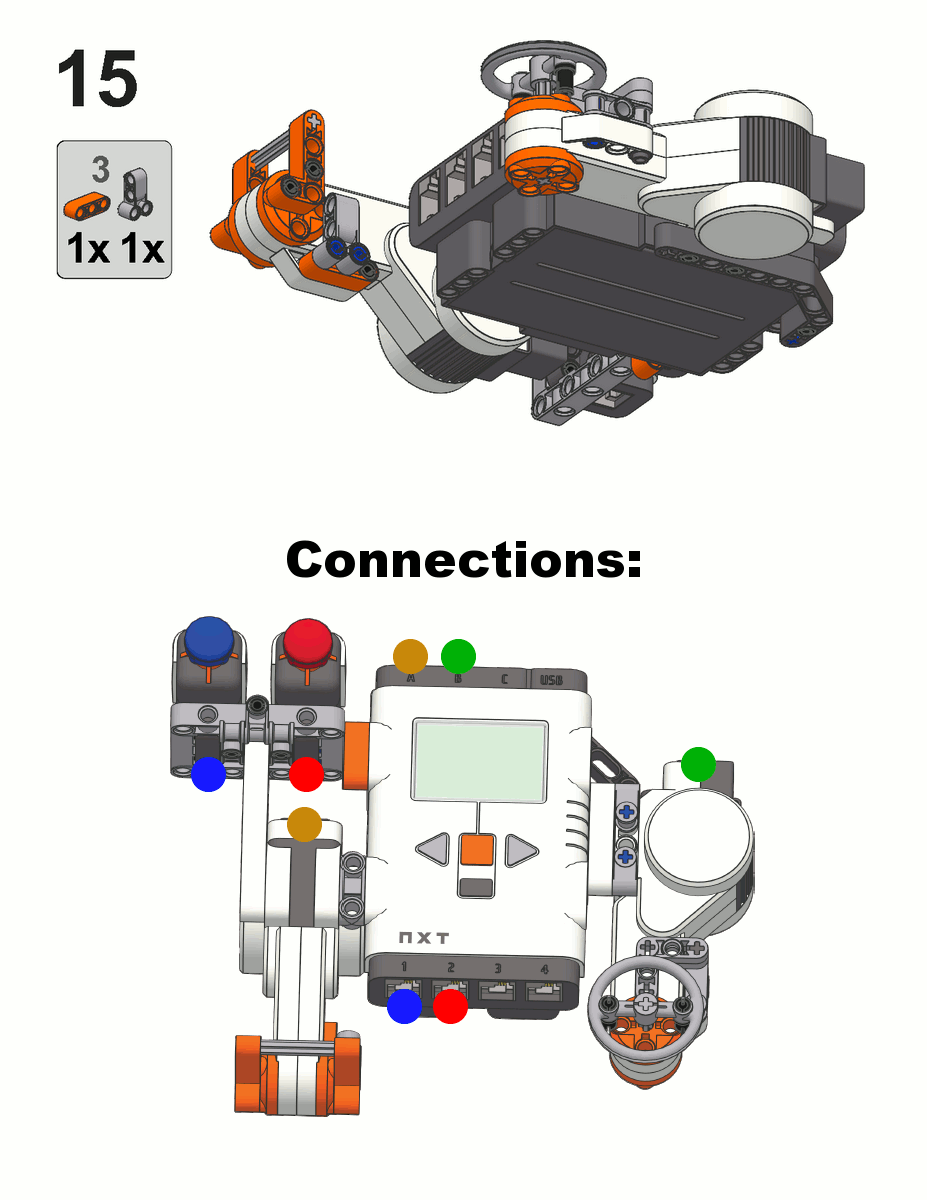
Pilot miał być w założeniu prosty jak konstrukcja cepa, i pozwalać na kontrolę prędkości napędu oraz proporcjonalne sterowanie. Instrukcja budowy samego pilota poniżej, do działania natomiast potrzebny jest dwuczęściowy program - jedna część odpalona na kostce-nadawcy, druga część na kostce-odbiorcy. Całość wykorzystuje proste przesyłanie wiadomości w ROBOTC 3.05, co oznacza że kostki muszą się już wcześniej "znać" zanim się połączą. Komunikacja odbywa się w dwie strony, dzięki czemu kostka-nadawca podaje aktualne napięcie w baterii kostki-odbiorcy. Drobiazg, ale jednocześnie marzenie każdego lenia - zdalne sprawdzanie ile pałeru zostało jeszcze w bateriach :)
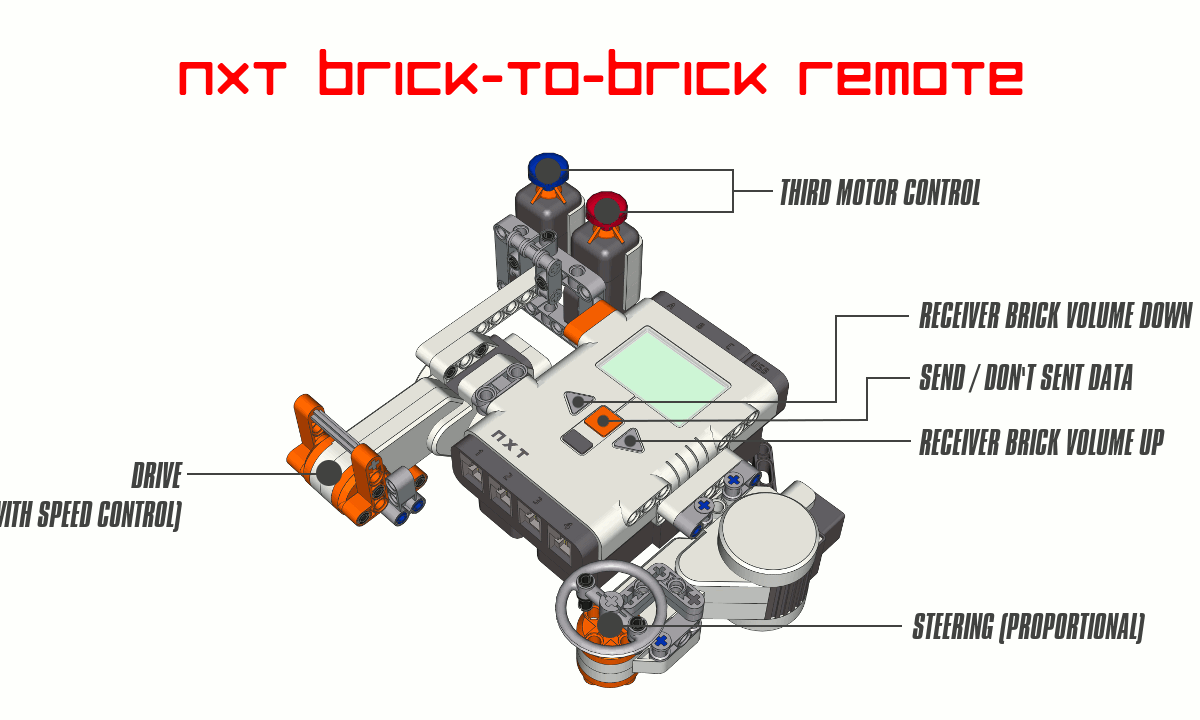
Silnik napędowy, podłączony do portu A kostki-odbiorcy, jest sterowany z kontrolą prędkości za pomocą wajchy po lewej stronie pilota. Ruch wajchy jest ograniczony mechanicznie, co pozwala uprościć program. Opcjonalnie kostka-odbiorca może brzęczeć przy cofaniu, co może się nadać do modeli ciężarówek czy autobusów. Przydaje się tu także zdalna regulacja głośności kostki-odbiorcy za pomocą przycisków strzałek na kostce-nadawcy.
Silnik do skrętu, podłączony do portu B kostki-odbiorcy, jest sterowany proporcjonalnie, co znaczy że zachowuje ten sam kąt co kierownica po prawej stronie pilota. Tak jak z wajchą do napędu, ruch kierownicy również jest ograniczony mechanicznie dla uproszczenia. Margines błędu wynosi 10 stopni i został przyjęty żeby uwzględnić bezwładność silników NXT. Zbyt niski margines błędu może sprawić że silnik dostanie czkawki próbując bezskutecznie ustawić się dokładnie na pożądanym kącie. Margines można dopasować w konfiguracji programu, znajdującej się na początku części odbiorczej.
Trzeci motor, podłączony do portu C kostki-odbiorcy, reaguje na wciskanie i przytrzymanie czujników dotyku. Tutaj bez żadnych bajerów.
Pomarańczowy przycisk na kostce-nadawcy włącza i wyłącza wysyłanie danych - po uruchomieniu programu jest ono domyślnie wyłączone, pozwalając dłubać w pilocie bez ryzyka zjechania MOCem ze stołu. W momencie wyłączenia wysyłania kostka resetuje wszystkie dane z wyjątkiem poziomu głośności, co zatrzymuje wszystkie silniki i centruje silnik do skrętu. Po ponownym włączeniu przesyłane są aktualne dane, a więc np. silnik do skrętu obróci się do aktualnej pozycji kierownicy.
Całość jest prosta i napisana przez początkującego :) ale mam nadzieję, że komuś się przyda.
Fotki:
Film:
[youtube]http://www.youtube.com/watch?v=n6ZZw8j8mug[/youtube]
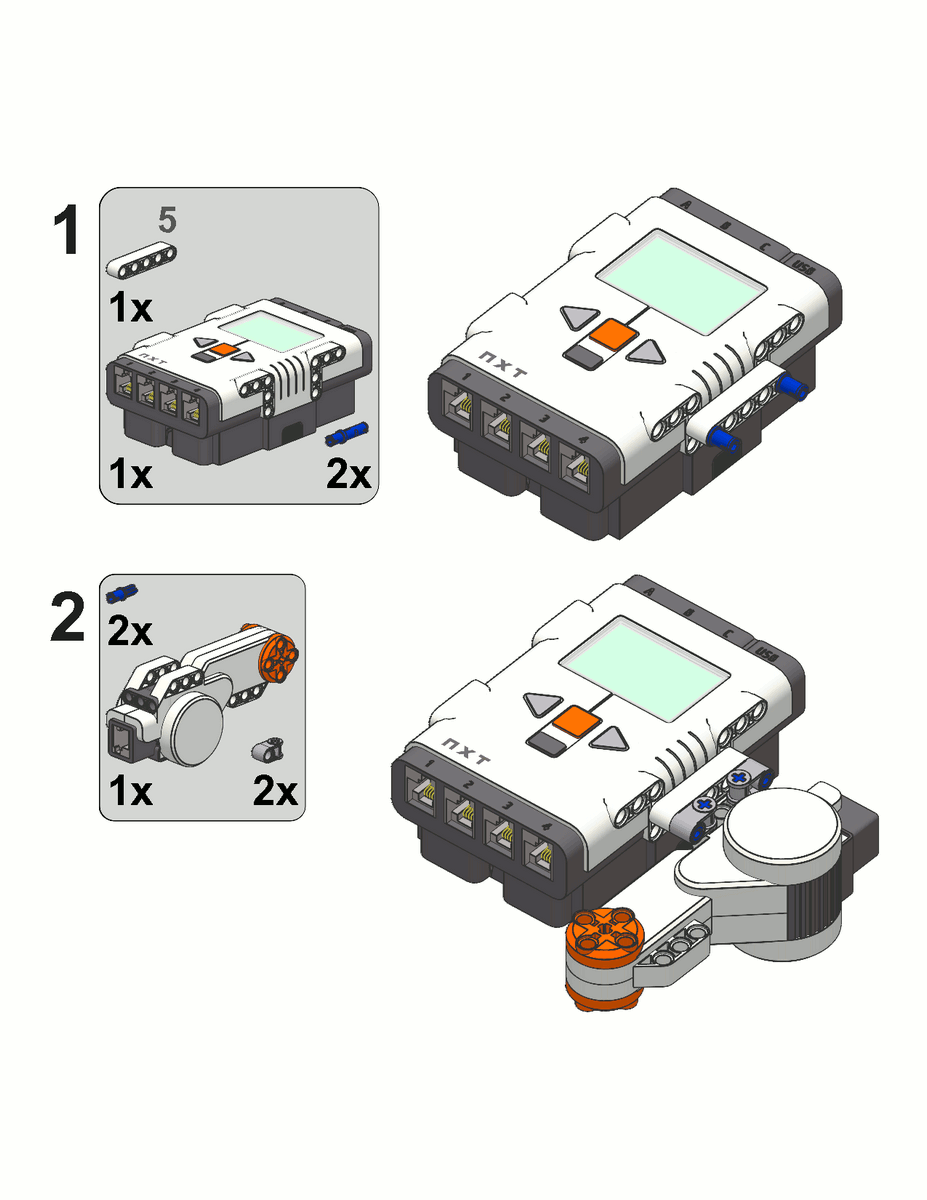
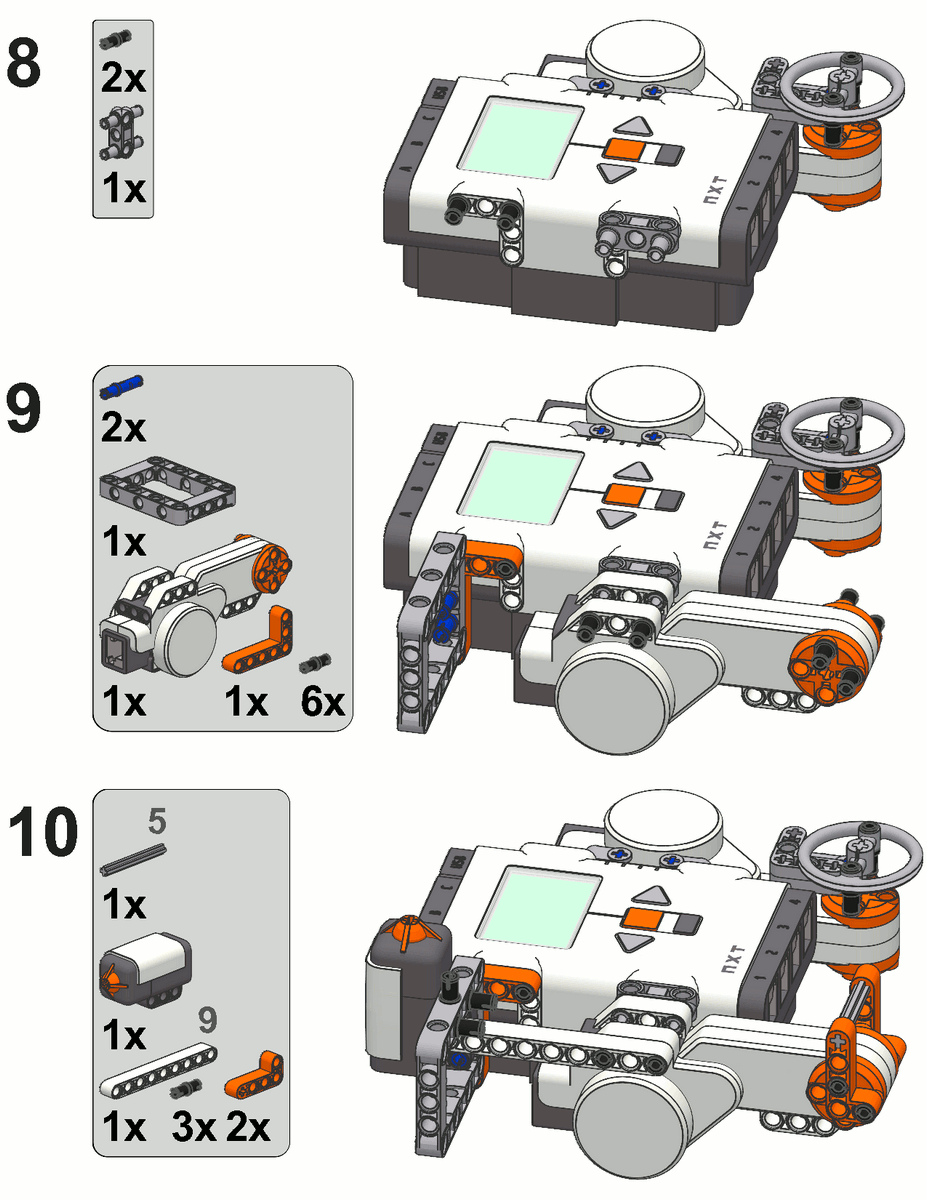
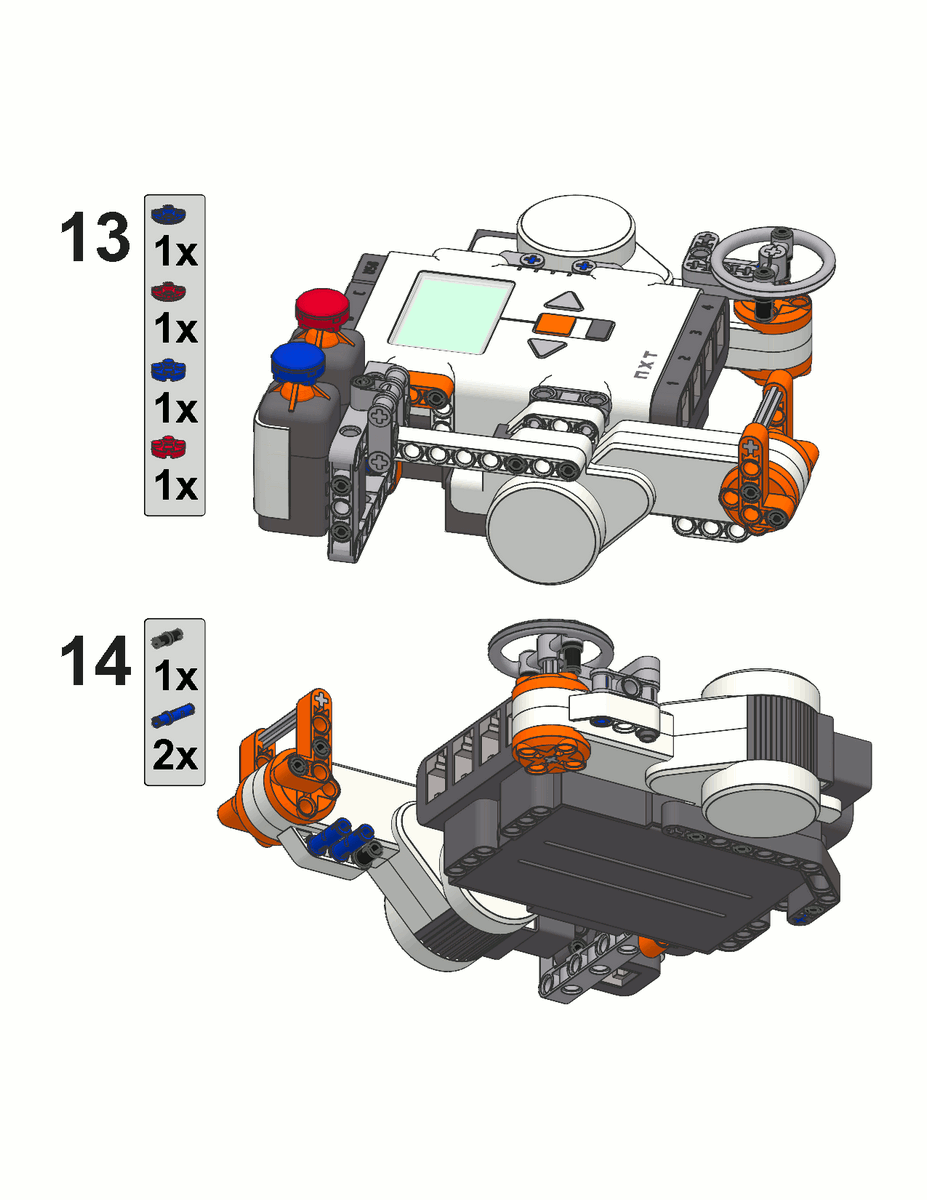
Instrukcja:



Program nadawczy:
Kod: Zaznacz cały
#pragma config(Sensor,S1,touch1,sensorTouch)
#pragma config(Sensor,S2,touch2,sensorTouch)
bool sending = false;
int soundLevel = 1;
task BatLev()
{
ubyte valueReceived[1];
valueReceived[0] = 0;
while(true)
{
cCmdMessageRead(valueReceived, 1, 1);
nxtDisplayCenteredTextLine(0, "BAT: L%3.1f / R%3.1f", nImmediateBatteryLevel / (float) 1000, valueReceived[0] / (float) 10);
wait1Msec(50);
}
return;
}
task Buttons()
{
nNxtButtonTask = -2;
nNxtExitClicks = 2;
nxtDisplayCenteredTextLine(1, "Not sending...");
while(true)
{
if(nNxtButtonPressed == 3)
{
PlaySound(soundBeepBeep);
if(sending == false){
sending = true;
nxtDisplayCenteredTextLine(1, "Sending...");
}
else{
sending = false;
ubyte valueToReset[5];
valueToReset[0] = 0;
valueToReset[1] = 0;
valueToReset[2] = 0;
valueToReset[3] = 0;
valueToReset[4] = soundLevel;
cCmdMessageWriteToBluetooth(valueToReset, 5, 1);
nxtDisplayCenteredTextLine(1, "Not sending...");
}
}
else if (nNxtButtonPressed == 1 && soundLevel < 3) soundLevel = soundLevel + 1;
else if (nNxtButtonPressed == 2 && soundLevel > 0) soundLevel = soundLevel - 1;
wait1Msec(350);
}
}
task main()
{
StartTask(BatLev);
StartTask(Buttons);
bFloatDuringInactiveMotorPWM = true;
btConnect(1, "NXT2"); // connection: port, brick
while(true)
{
ubyte valueToSend[5];
valueToSend[0] = nMotorEncoder[motorA];
valueToSend[1] = nMotorEncoder[motorB];
valueToSend[2] = SensorValue(touch1);
valueToSend[3] = SensorValue(touch2);
valueToSend[4] = soundLevel;
if(sending == true){cCmdMessageWriteToBluetooth(valueToSend, 5, 1);}
nxtDisplayTextLine(3, "Drive: %d", valueToSend[0]);
nxtDisplayTextLine(4, "Steering: %d", valueToSend[1]);
nxtDisplayTextLine(5, "Touch BLUE: %d", valueToSend[2]);
nxtDisplayTextLine(6, "Touch RED: %d", valueToSend[3]);
nxtDisplayTextLine(7, "Volume: %d", valueToSend[4]);
wait1Msec(50);
}
}Kod: Zaznacz cały
// config start
//bMotorReflected[motorA] = true;
//bMotorReflected[motorB] = true;
//bMotorReflected[motorC] = true;
bool buzzOnRev = true; // buzzing while on reverse
int steerAcc = 10; // steering accuracy margin (degrees)
// config end
task BatLev()
{
while(true)
{
nxtDisplayCenteredTextLine(0, "BAT: L %3.1fV", nImmediateBatteryLevel / (float) 1000);
ubyte valueToSend[1];
valueToSend[0] = nImmediateBatteryLevel / (float) 100;
cCmdMessageWriteToBluetooth(valueToSend, 1, 1);
wait1Msec(50);
}
return;
}
task main()
{
StartTask(BatLev);
nVolume = 1; // starting volume
ubyte valueReceived[5];
valueReceived[0] = 0;
valueReceived[1] = 0;
valueReceived[2] = 0;
valueReceived[3] = 0;
valueReceived[4] = 1;
while(true)
{
cCmdMessageRead(valueReceived, 5, 1);
nxtDisplayTextLine(2, "Drive: %d", valueReceived[0]);
nxtDisplayTextLine(3, "Steering: %d", valueReceived[1]);
nxtDisplayTextLine(4, "Touch BLUE: %d", valueReceived[2]);
nxtDisplayTextLine(5, "Touch RED: %d", valueReceived[3]);
nxtDisplayTextLine(6, "Volume: %d", valueReceived[4]);
nVolume = valueReceived[4];
// motorA (drive)
motor[motorA] = 0;
int afactor = valueReceived[0] / 5;
if (afactor > 1 && afactor < 15)
{
afactor = afactor * 10;
if (afactor > 100) afactor = 100;
motor[motorA] = afactor;
if (buzzOnRev == true) ClearSounds();
}
else if (afactor > 1 && afactor > 25)
{
afactor = (51 - afactor) * -10;
if (afactor < -100) afactor = -100;
motor[motorA] = afactor;
if (buzzOnRev == true) PlaySound(soundException);
}
// motorB (steering)
motor[motorB] = 0;
int bfactor = valueReceived[1];
if (bfactor > 1 && bfactor < 75) bfactor = bfactor;
else if (bfactor > 1 && bfactor > 75) bfactor = (256 - bfactor) * -1;
nxtDisplayTextLine(7,"Mtr B: %d/%d",nMotorEncoder[motorB], bfactor);
if (nMotorEncoder[motorB] < (bfactor + steerAcc)) while(nMotorEncoder[motorB] < bfactor) motor[motorB] = 10;
else if (nMotorEncoder[motorB] > (bfactor - steerAcc)) while(nMotorEncoder[motorB] > bfactor) motor[motorB] = -10;
else motor[motorB] = 0;
// motorC
motor[motorC] = 0;
if (valueReceived[2] == 1) motor[motorC] = 100;
else if (valueReceived[3] == 1)motor[motorC] = -100;
wait1Msec(50);
}
}