
Robot sterowany pilotem który posiada łącznie 10 funkcji.
Dane techniczne:
8 silników PF medium
3 silniki PF XL
6 wież IR
3 battery box
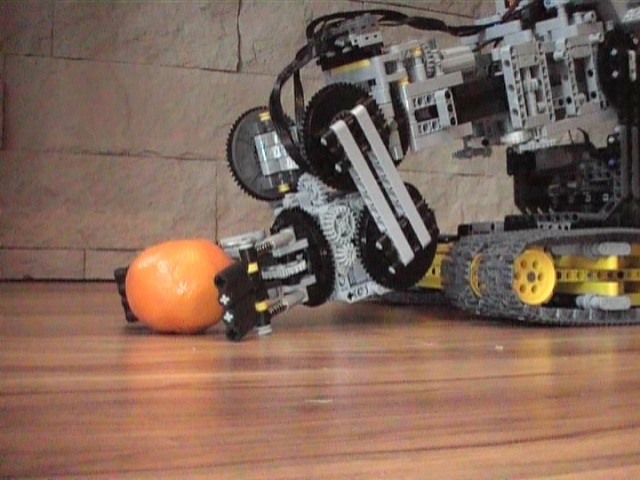
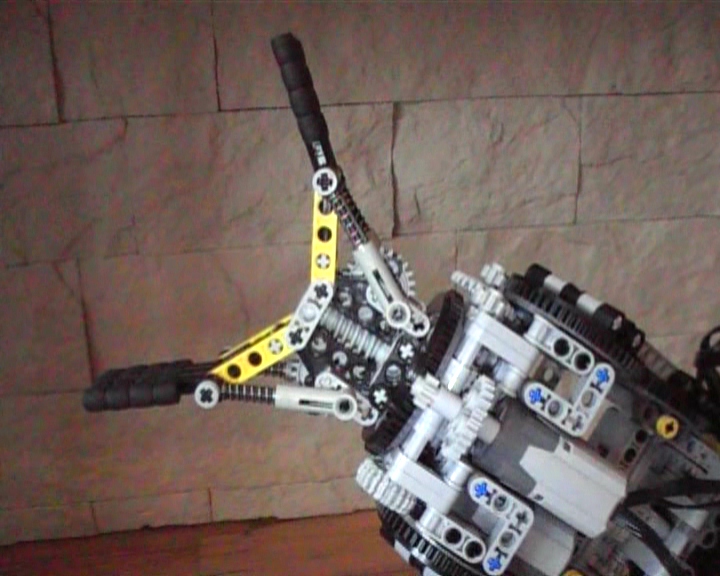
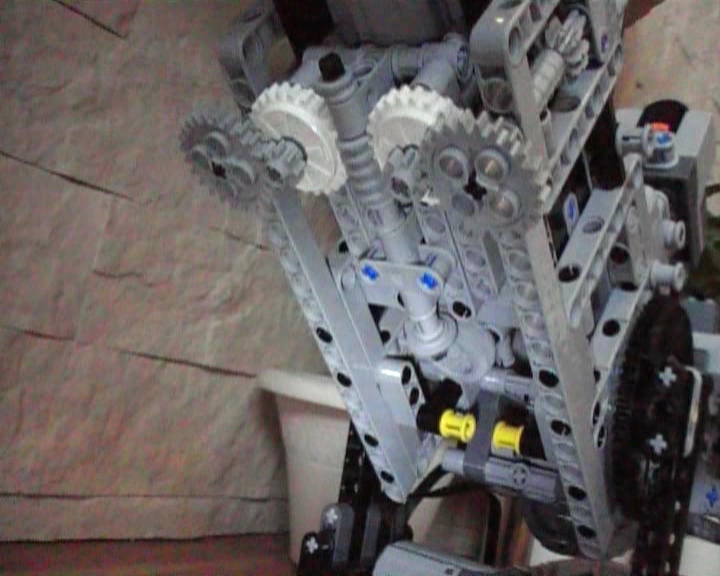
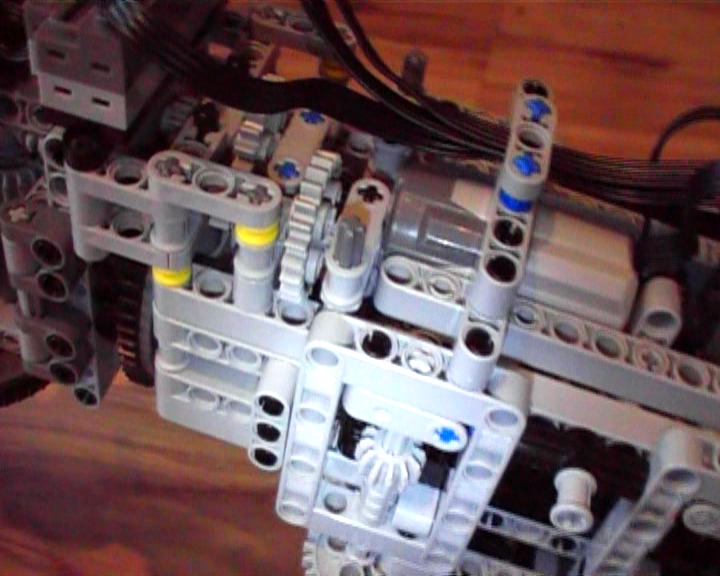
Zacznę od tego co mi się najbardziej podoba czyli głowicy chwytającej. Składa się ona z 6 obrotnic co daje jej ponad przeciętne możliwości. Chwytak potrafi ustawić się w wielu pozycjach i jest dosyć szybki. Sam element chwytający jest zbudowany z gumek dla lepszego trzymania oraz wspomagają go 4 amortyzatory. Są one głównie z powodu problemu jaki powstaje podczas obrotu pierwszej obrotnicy przy chwytaku. Gdy chwytak się kręci to jednocześnie się otwiera i puszcza to co trzyma. Amortyzatory dają sporo czasu na ewentualne dociśnięcie przedmionu zanim wypadnie.
Na głowicy chwytaka zabudowałem 3 silniki PF medium które wykonują funkcje: łapanie, obrót wokół własnej osi, pierwsze wychylenie.
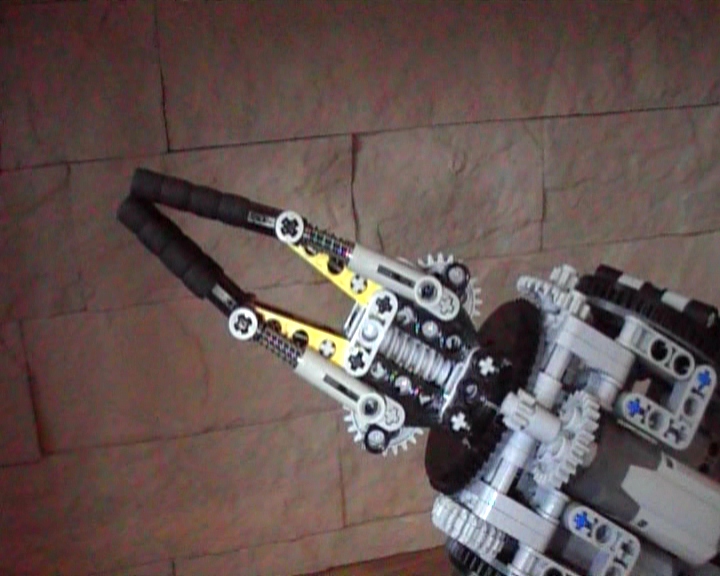


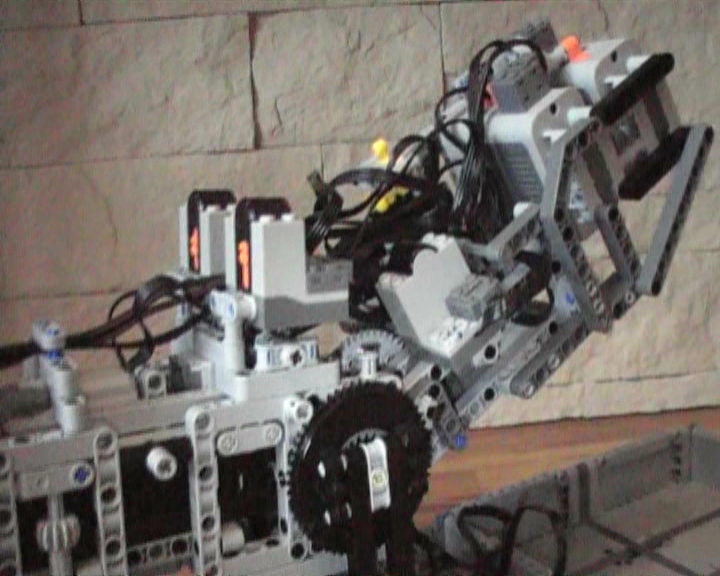
Następnym elementem jest moduł wysuwana. Są w nim umieszczone dwa silniki PF medium które odpowiadają za drugie wychylenie i drugi obrót wokół własnej osi. Moduł ten wysuwa się o 7 oczek.
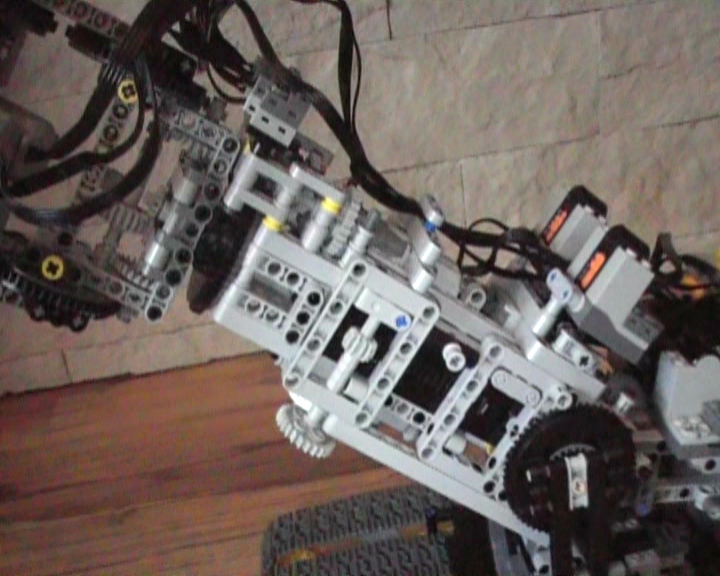
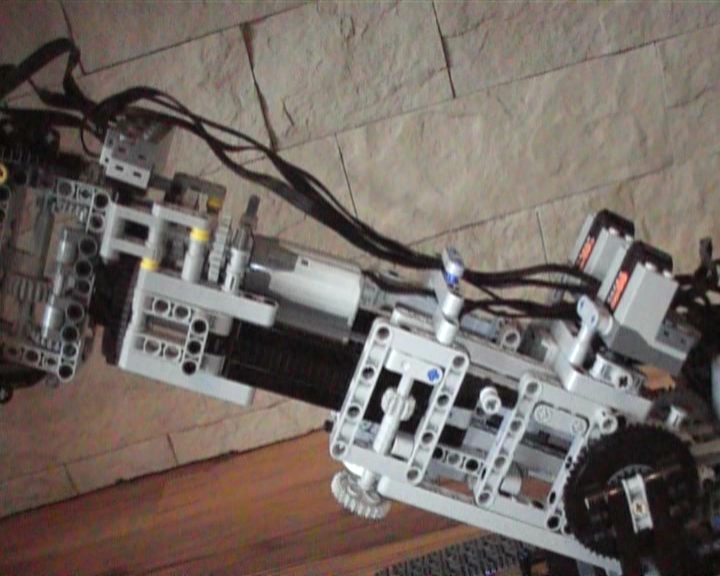
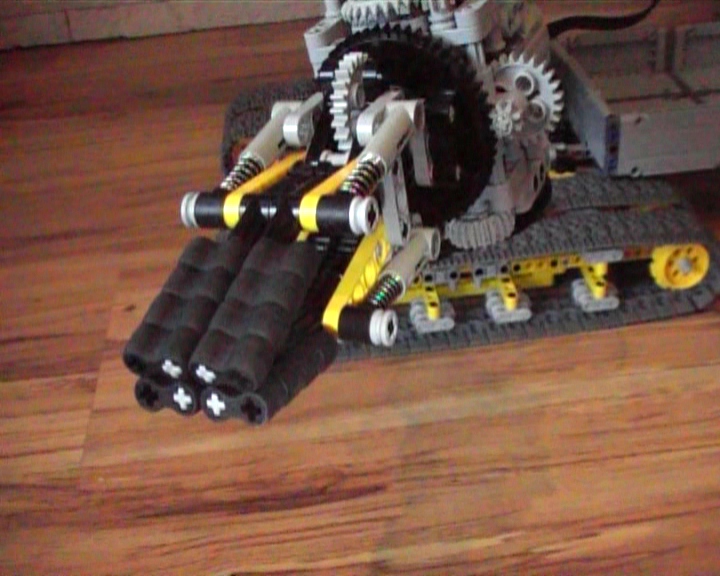
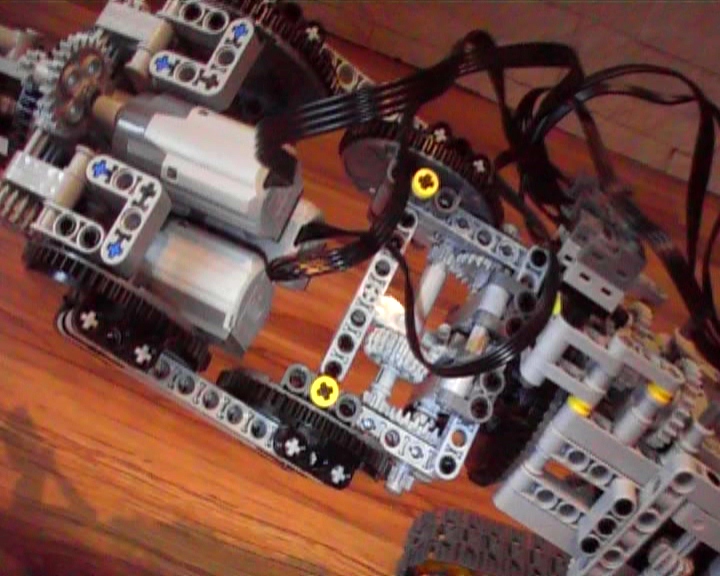
Kolejnym elementem jest częćś stała w której znajduje się silnik PF medium do wysuwania chwytaka oraz po drugiej stronie dla przeciw wagi dwa pojemniki na baterie z małym silnikiem na przełączanie między nimi. Znajduje się tam również silnik PF XL do poruszania całym ramieniem w górę i na dół. Pod ramieniem znajduje się silnik PF medium który służy do obrotu ramienia na boki. Ma on zakres 360 stopni ale z powodu kabli jest ograniczony.
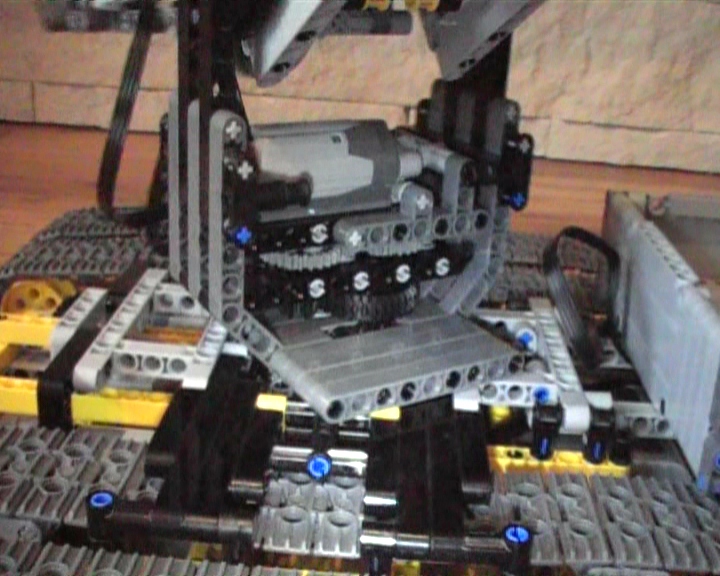


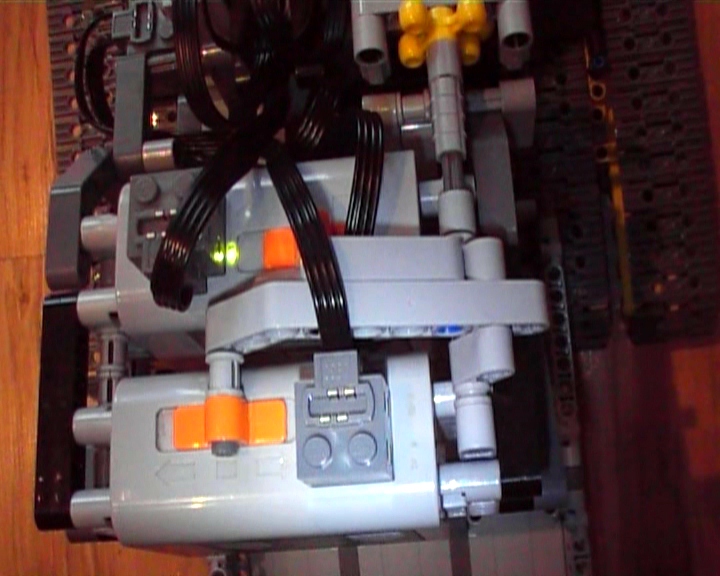
Całość umieszczona jest na platformie gąsienicowej i napędzana dwoma silnikami PF XL. Silniki te napędzają wszystkie koła gąsienicy dla łatwiejszej pracy. W podwoziu znajduje się też trzeci pojemnik na baterie który zasila gąsienice i silnik do przełączania pozostałych dwóch pakietów baterii.


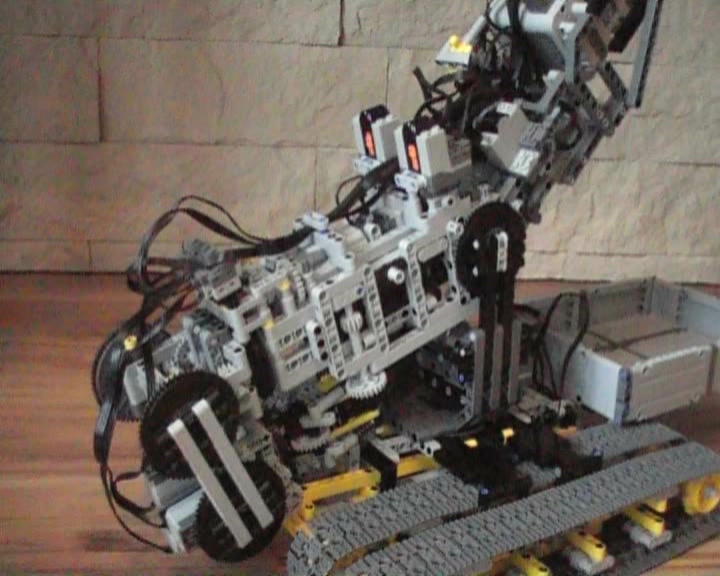
Robot z wyglądu może się nie podobać jednak mi podoba się jego funkcjonalność z której jestem szczególnie dumny. Na koniec zapraszam na dwa filmiki które pokazują jego działanie. Pierwszy demonstruje ogólne działanie, drugi trzy testy z przedmiotami o różnej wielkości i masie. Dziękuję i zapraszam do komentowania.
[youtube]http://www.youtube.com/watch?v=oP8JnkJwI2M[/youtube]
[youtube]http://www.youtube.com/watch?v=xVcz5yL_5ng[/youtube]
Galeria
Więcej MOCy na moim kanale YouTube




