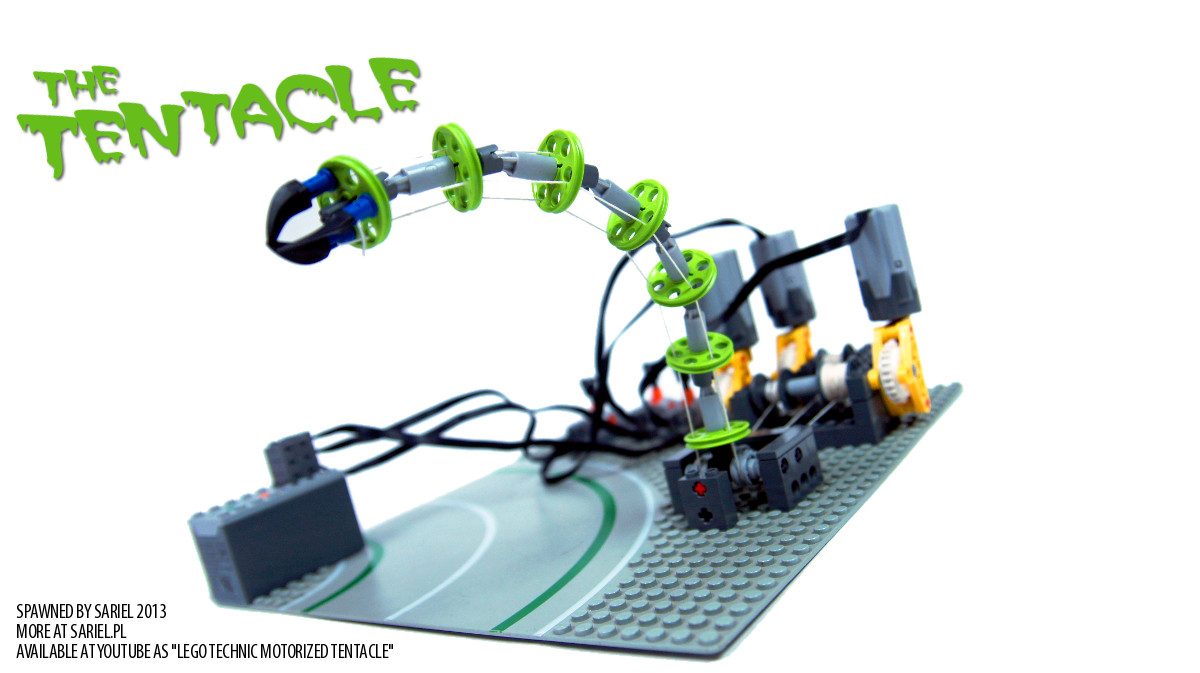
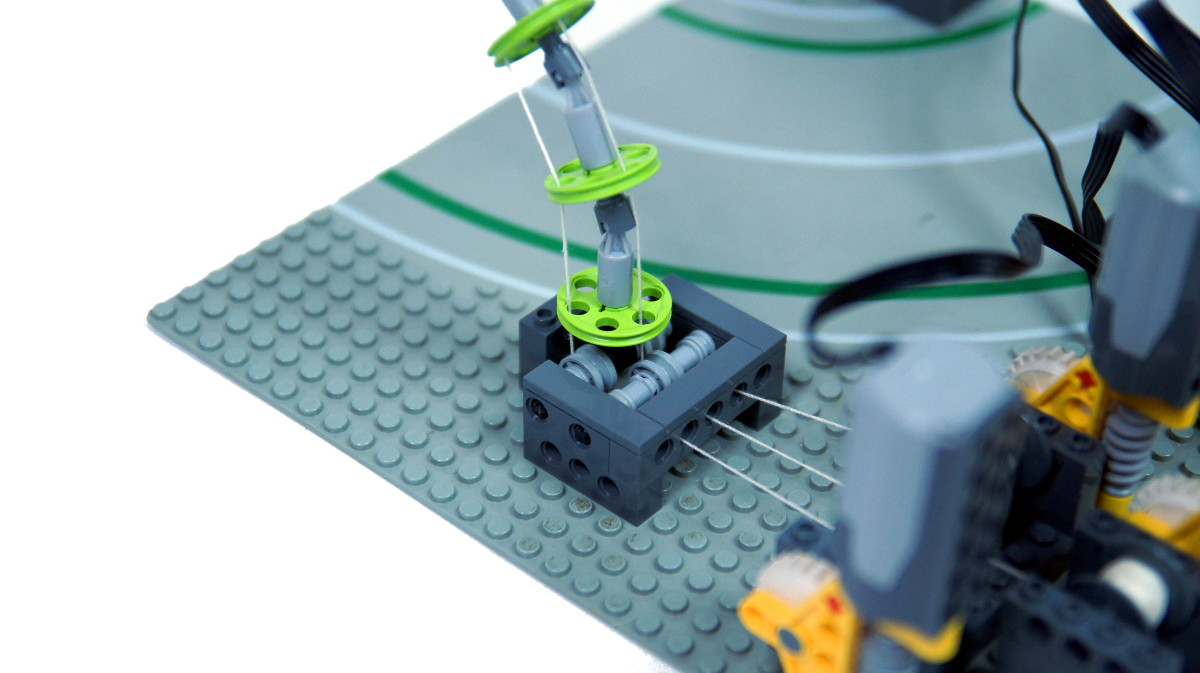
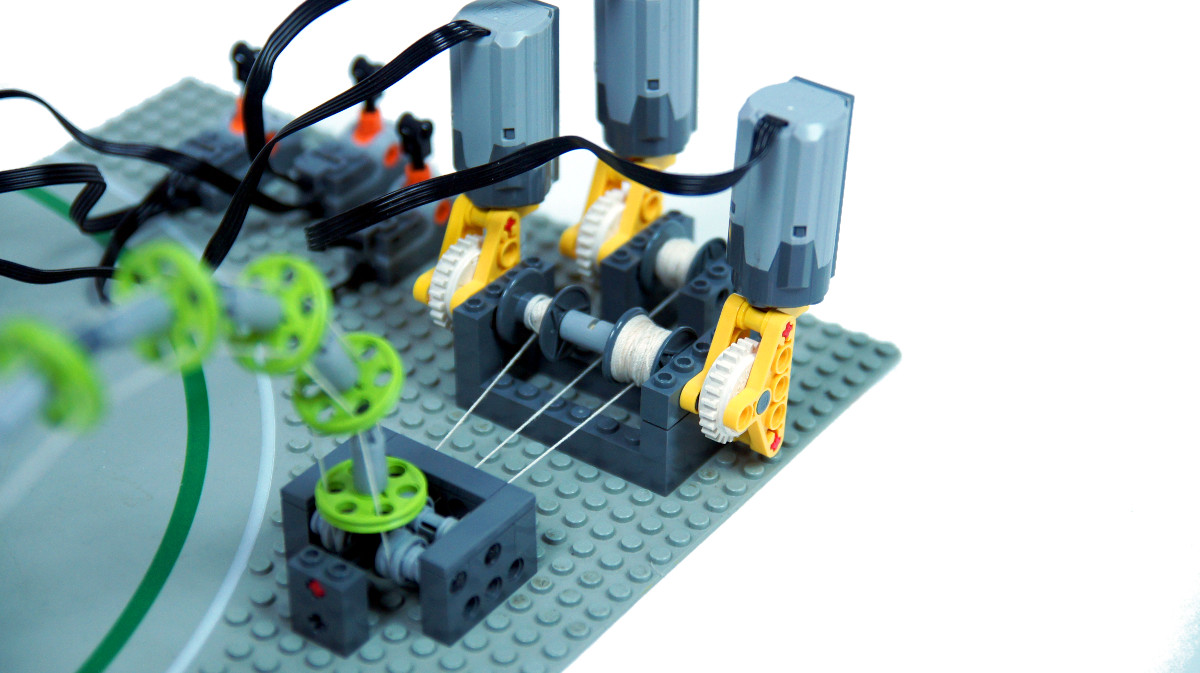
Taki luźny pomysł, wygląda jak na zdjęciach, działa jak na filmie. Może komuś się przyda do zbudowania roboJeraca. Krótkie Q&A:
- dlaczego nie kardany?
Bo zginają się za daleko.
- jak długie może to być?
Ciężko powiedzieć, ale im dłuższe, tym trudniej kontrolować.
- jest jakaś specjalna metoda sterowania tym?
Nie, sterowałem zupełnie na czuja. Ktoś z większym zboczeniem programistycznym niż moje mógłby to pewnie podpiąć pod NXT i napisać algorytm przekładający ruch gałki w padzie na te trzy sznurki. Z krótką macką dałoby się pewnie łatwo sterować ręcznie, po prostu przywiązać końce sznurków do czegoś trójkątnego, zamocować środek tego na ball joincie i gibać tym na boki.
- da się większe?
Pewnie się da, np. na ball jointach z Unimoga, które dałyby też możliwość puszczenia wału napędowego przez środek i napędzania czegoś na końcu macki.
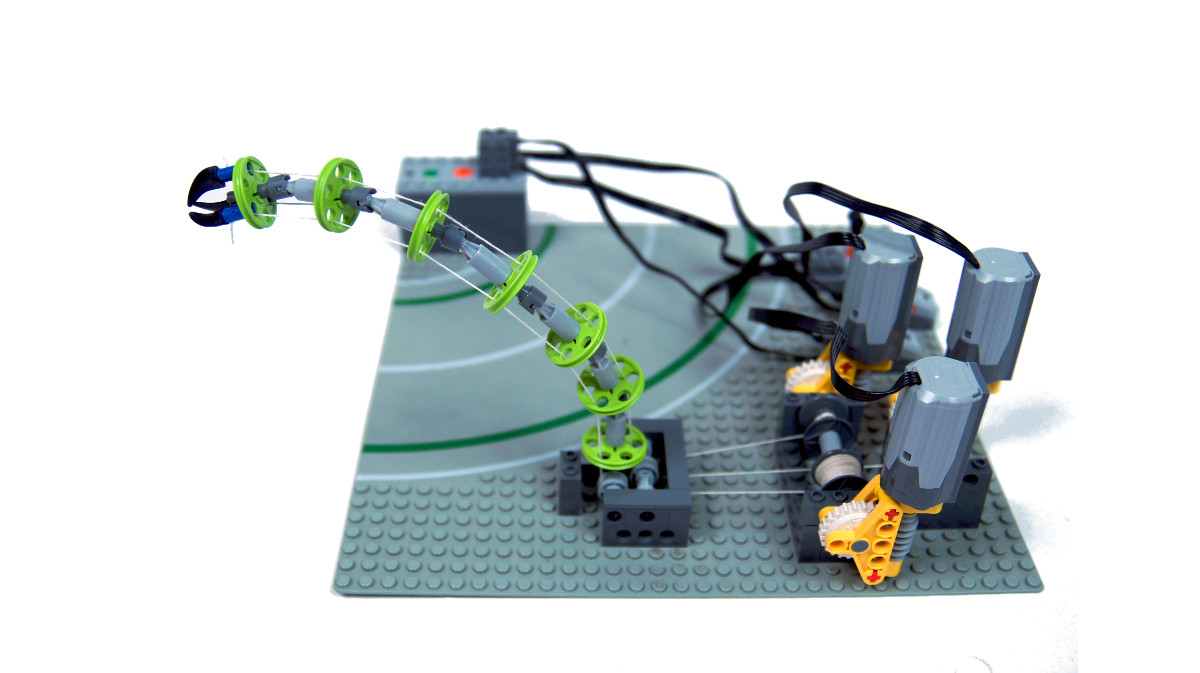
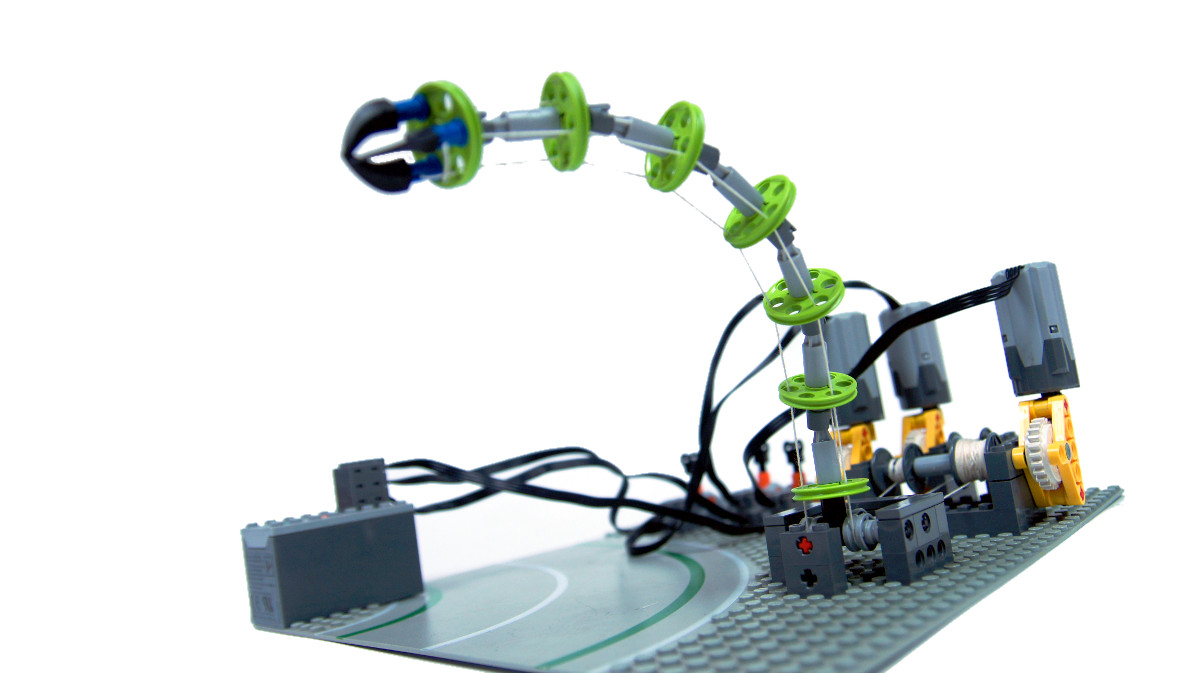
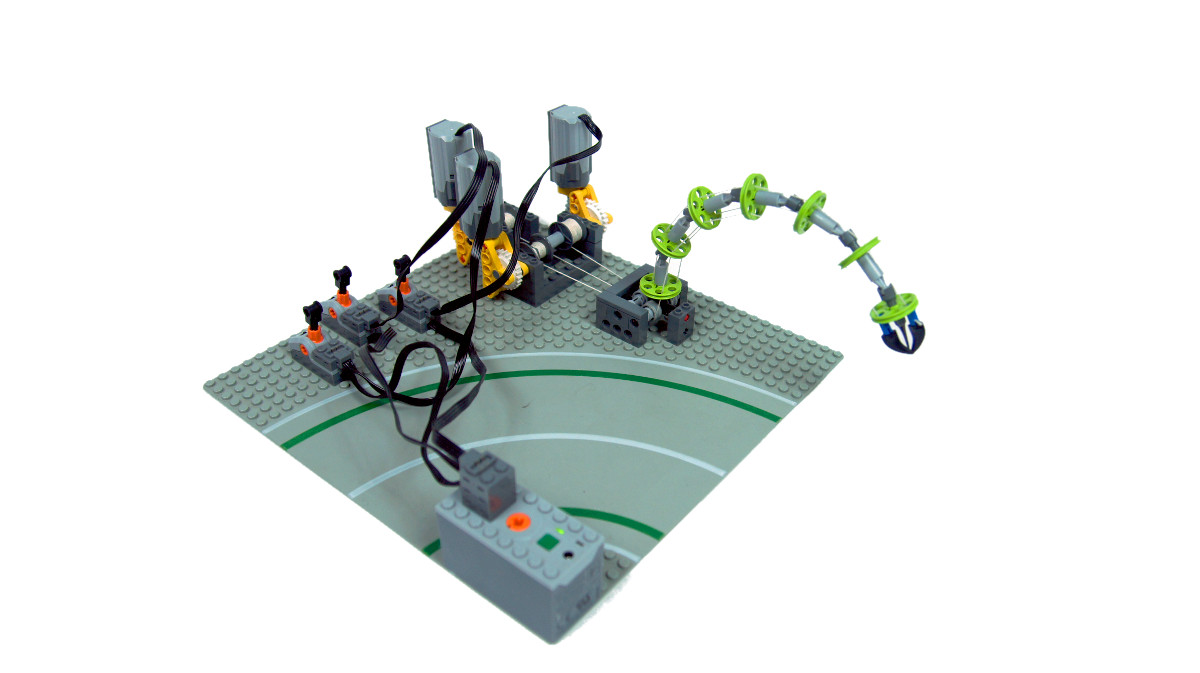
Galeria
Parę fotek:

I hentai z chomikiem:
[youtube]http://www.youtube.com/watch?v=2H_cdxgvXmA[/youtube]