HotRod 4WD

Mówisz i maszpkowalcz pisze:Hot Rod z Lego Technic to na tyle ciekawy (i niecodzienny) pomysł, że przydałoby się go choć trochę dopracować. (...) Mam nadzieję, że kiedyś zrobisz jego udoskonaloną wersję, w której już będą detale
Dane techniczne:
Wymiary: dł. 43 cm, szer. 23 cm, wys. 16 cm
Masa: 1.55 kg
Zawieszenie: pełne niezależne
Napęd: 1 silnik RC przez dwubiegową skrzynię biegów na wszystkie koła
Silniki: 1 x RC, 1 x 2838
Zachciało mi się czegoś bardziej dopieszczonego na kołach od 8880, et voila
Oprócz tego mamy ruchomą atrapę silnika w układzie V12, pracującą kierownicę, pracującą dźwignię zmiany biegów, pracującą dźwignię hamulca ręcznego, otwierane drzwi, otwierany bagażnik, a w nim ciekawostkę pod tytułem hamulec pneumatyczny.
Po co hamulec? Po pierwsze mamy tu skrzynię biegów opartą na driving ringach, a więc z biegiem luźnym. Choćbyśmy nie wiem jak szybko zmieniali biegi, pewien moment luzu zawsze będzie, tymczasem hamulec pozwala spokojnie zmieniać biegi na wzniesieniach itp. Po drugie, od dawna uważałem to za ciekawe zagadnienie konstrukcyjne - w prawdziwych samochodach mamy klocki ścierne, w Lego trzeba trochę gimnastyki żeby nic nam się nie ścierało, łamało czy rysowało. Pomyślałem o szczękach z liftarmów zaciskanych (z dwóch stron, żeby wyeliminować poślizg) pneumatycznie na ogumionym kole pasowym, zamocowanym na napędzanej osi. Ten prościutki mechanizm okazał się działać zaskakująco dobrze - nie tylko jest w stanie utrzymać pojazd na wzniesieniu na luźnym biegu, ale również zatrzymać silnik RC który na niższym biegu działa tu z przełożeniem 432 : 1.
Ostatnim małym sukcesem jakim mogę się pochwalić jest zmieszczenie obu silników wewnątrz ramy - 2838 wisi pod atrapą silnika, milimerty nad przednim zawieszeniem, a RC przechodzi przez liftarmowy szkielet ramy wzmacniając go jednocześnie. Sama rama to szkielet z liftarmów obudowany i wypełniony belkami - szczególnie w rejonie skrzyni biegów to wypełnienie jest bardzo pancerne.
Zwracam też uwagę na sposób przeniesienia napędu na dyferencjały - pierwotnie chciałem użyć zębatki 32198, bo pozwalała zaoszczędzić krytyczną ilość miejsca, a dociśnięta z dwóch stron zębatkami 32270 nie przeskakiwała pod żadnym obciążeniem. Finalnie okazała się potrzebna większa redukcja przełożenia, zastąpiłem ją więc zębatką 6589, zmieniając przełożenie uzyskane w takim układzie z 6:5 na 2:1.
Ok, dość gadania pora na zdjęcia
Galeria zdjęć
I zdjęcia na zachętę:
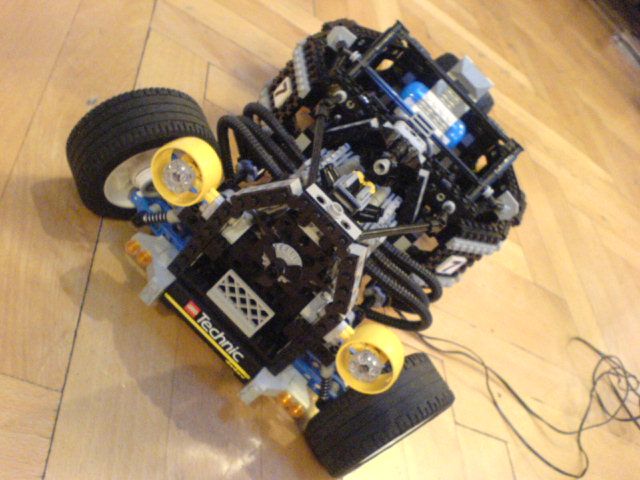
Widok z góry:

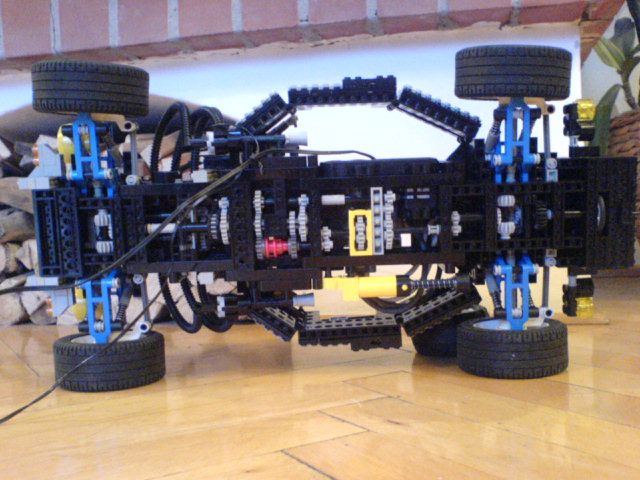
Widok z boku:

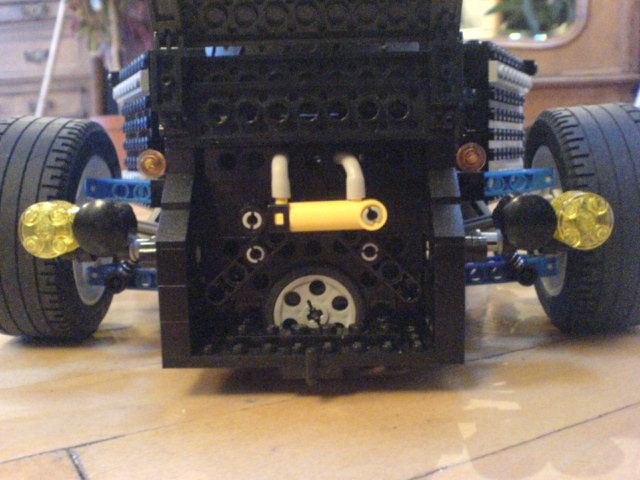
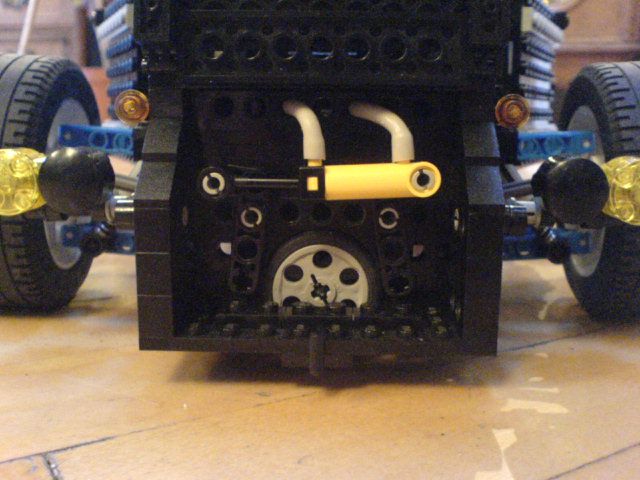
Widok z przodu, widać że koła zachowują geometrię skrętną Ackermanna - wewnętrzne jest ostrzej skręcone:
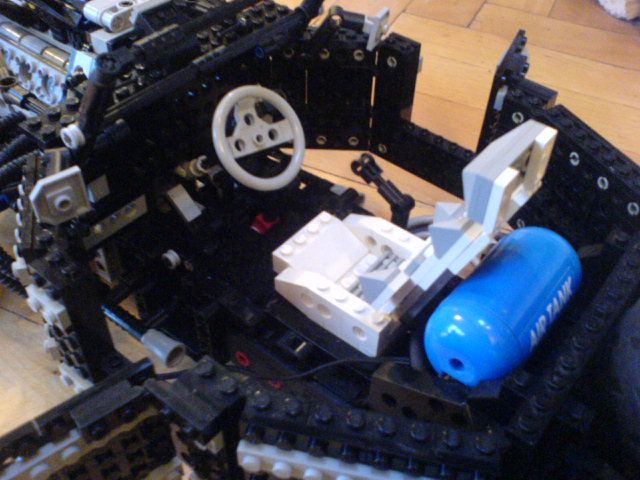
Wnętrze kabiny z otwartymi drzwiami, widać całe oprzyrządowanie typu dźwignie, pedały itp:
Otwieramy bagażnik i...:

...widzimy hamulec zwolniony...:
...i zaciśnięty:
Spód:
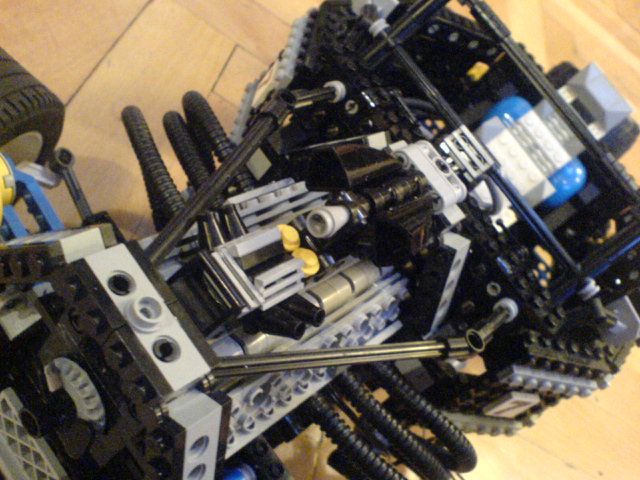
Zawieszenie w pracy, widać jak ustawione są amortyzatory, i że można je ustawić 'ostrzej':

Zbliżenie na detale atrapy silnika (zastrzegam - o budowie silników mam bardzo mgliste pojęcie):
PS. Specjalne podziękowanie dla Jonder_qinda bez którego uczynności zabrakłoby mi części do ukończenia karoserii