
Pisząc ograniczone w powyższym paragrafie miałem na myśli w szczególności zakres ruchów mojego poprzedniego robota. Był bardzo ograniczony, głównie ze względu na to, że w pierwszej kolejności skupiłem się na budowie dłoni, przedramienia i nadgarstka pozostawiając największe partie (tylną część ramienia i podstawę) bez "interwencji automatyka". Miało to oczywiście swoje plusy, nie musiałem przecież tworzyć mocno obciążonych dodatkowych osi obrotu w okolicach barku, co i tak pewnie dla wielu wydałoby się niemożliwe.
Ciekawszym rozwiązaniem później wydało mi się wówczas stworzenie mniej humanoidalnej a bardziej robotycznej ręki, na której można by było odtworzyć znacznie szerszy wachlarz sztuczek typu: zabawa z jabłkami i przenoszenie technicowych kół. Takim idealnym wzorcem są oczywiście, pewnie większości znane manipulatory wieloosiowe. Są to maszyny najczęściej wykorzystywane jako roboty produkcyjne do pracy w fabrykach ze względu na swoją uniwersalność. W ogóle Technica odziwo spotkałem się z dosyć małą liczbą tego typu konstrukcji, a te, które widziałem najczęściej nie budziły we mnie większego wow. Ale ponieważ w wielu przypadkach wyjątek potwierdza regułę, tak i w tej dziedzinie na uwagę niewątpliwie zasługuje robot azjatyckiego konstruktora akiyuky:
[youtube]https://www.youtube.com/watch?v=7zobzqcsjIQ&t[/youtube]
Trzeba przyznać, że mimo surowego wyglądu działa to bardzo zwinnie i może posłużyć za wzór jeszcze wielu innym fanom klockowej mechatroniki, zważywszy w szczególności na to, że niemal wszystkie ważniejsze elementy są na tym filmie widoczne. Bardziej wykwintni koneserzy mogą obecnie już tylko zadowolić się rzeczywistymi manipulatorami od firm KUKA, ABB czy Mitsubishi.

Nie szukając dalej, zacząłem budować. Początkowo segment umiejscowiony bezpośrednio za chwytakiem, który niejako mieścił w sobie 3 pomocnicze osie, a później przyszły zamówione obrotnice i zabrałem się za całą resztę. O ile na początku było łatwo, później, w szczególności wtedy gdy do gry weszły większe obciążenia zabawa się skończyła a zaczęła agonia zmieniania ogólnej struktury i metod poruszania poszczególnymi sekcjami. Początkowo chciałem do tego wykorzystać jedynie silniki z solidnie przyłączoną przekładnią ślimakową, ale naprężenia stały się tak duże, że nawet ku mojemu zdziwieniu ślimak z zębatką 24z zamknięty w jednoczęściowej obudowie nie pomógł... A wszędzie tam gdzie fizyka nie pozwala, trzeba po prostu zmienić plany. I tak ostatecznie zdecydowałem się na użycie siłowników śrubowych. Wspominałem już, że nawet wtedy w wyniku przeciążenia uszkodził mi się jeden z silników XL?
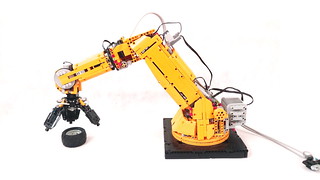
Całą konstrukcję natomiast udało mi się ustawić na łożysku zrobionym z żółtych ćwiartek zębatych od 42055. Zrobione było to tak, że dwa pierścienie zostały wyłożone 60 sztukami okrągłych kafelków 1x1, co w rezultacie daje bardzo dobrą redukcję tarcia i dzięki temu zabiegowi możliwe było obracanie całością z wykorzystaniem jednej PF L-ki. To genialne w swej prostocie rozwiązanie widziałem kiedyś na jednym z filmów Sariela.
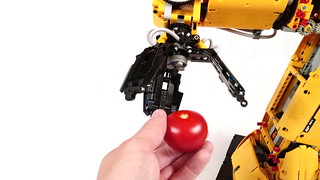
Koniec końców, powstał model, który zaliczyłbym raczej do konstrukcji prezentacyjnych, ale nadal mniej praktycznych na co wpływa m.in. uszkodzenie silnika podczas budowy - w jego wyniku musiałem się zdecydować napędzać funkcję ręcznie co trochę trwa. Podobna sytuacja wynikła też z kompresorem do chwytaka - po paru próbach zdecydowałem się na osobną pompkę z zewnętrznym zaworem. Ciekawych doświadczeń przysporzyło też modelowanie robota. A ponieważ w dużej mierze mechanika modelu mimo faktu wystąpienia wszystkich sześciu osi i chwytaka kasku nie urywa, postanowiłem, że robot będzie przynajmniej wyglądać dobrze, w końcu model jak zakładam, będzie mi służył głównie do celów prezentacyjnych. I tak trafiamy na panele #13 i #14, które w żółci występują jedynie w 3 zestawach po 2 szt. w każdym, a ich ceny na BL zaczynają się od 28 zł za sztukę... Na szczęście nie musiałem tyle bulić :)

