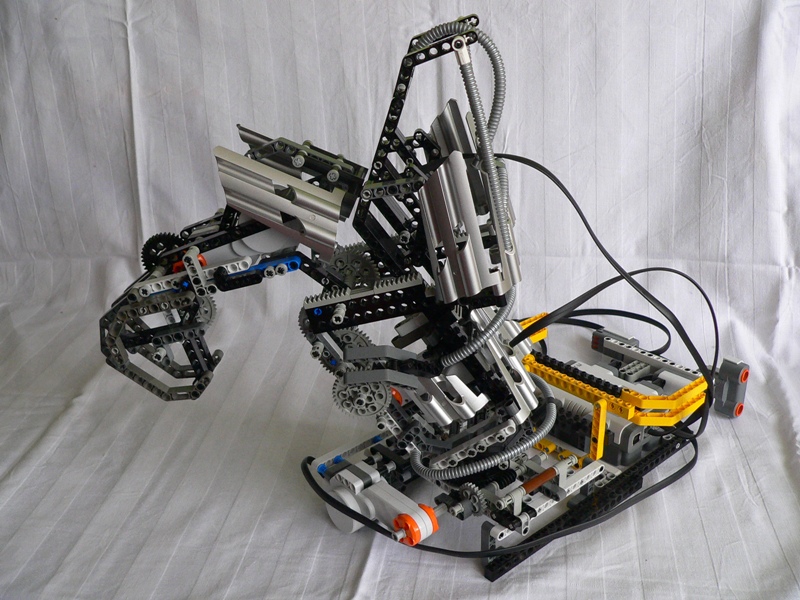
Chcę się pochwalić przed wami moim nowym MOCem. Jest to Ramię sterowane poprzez procesor NXT. Niestety jest to jeszcze wersja manualna. Aby obracać i podnosić ramię, należy oddziaływać na poszczególne czujniki. Jest to niekomfortowy sposób sterowania.
Podczas pierwszej fazy budowy tegoż ramienia nie przewidziałem dogodnego miejsca na umieszczenia dalmierza ultradźwiękowego. Podczas pisania algorytmu zreflektowałem się i chciałem aby moje cacko automatycznie wychwytywało przedmiot, który ma podnieść i przenosiło w odpowiednie miejsce. Ramię jest sterowane trzema silnikami.
Czy ramię jest jakoś zautomatyzowane, czy moduł NXT służy tylko do ręcznego sterowania? Duży krok do przodu pod względem wyglądu od podprzedniej wersji :)
Podczas pierwszej fazy budowy tegoż MOCa nie uwzględniłem zamieszczenia dalmierzu ultradźwiękowego. Potem, podczas pisania oprogramowania postanowiłem umieścić dalmierz gdzieś w okolicach ramienia, lecz wszystkie możliwe miejsca były niekomfortowe. Algorytm okazywał się czasem wadliwy, ponieważ czujnik wskazywał różne odległości, zależnie od położenia ramienia. Doszedłem do wniosku, że aby MOC był funkcjonalny muszę przebudować połowę ramienia, lub zmienić oprogramowanie. Wybrałem mniejsze zło ;) Jak znajdę czas zrobię wersję 1.2. Będzie to zarazem wersja finalna.
I bardzo dziękuj, za wydanie dobrej opinii o wyglądzie MOCa ;) Podbudowałeś mnie do dalszej pracy.