[MOC] Zis e134 8x8
: 2010-09-10, 06:34
Przedstawiam moją ciężarówkę do Truck Trialu na sezon 2010.
ZIS e134
Jest to Rosyjski prototyp z 1955 roku. Powstały tylko 4 sztuki. Produkcja nie została uruchomiona z powodu słabej jednostki napędowej (R6, 130KM).
Jednak układ ciężarówki był bardzo obiecujący jeśli chodzi o sprawność w terenie.
Poza tym to pierwsza maszyna w której zastosowano pneumatyczne opony z regulacją ciśnienia z kabiny.
Zdjęcie rzeczywistej maszyny:

Mój model LEGO w skali 1:13:








Wizualnie maszyna nie jest standardowa nawet w rzeczywistości. Jednak ma swój urok i to coś.
Myślę, że jej kształty udało mi się dość dobrze odwzorować. Smyk trochę narzeka na liftarmowe błotniki :-) Jednak jest to dość mocne i praktyczne.
Na szczególną uwagę zasługuje atrapa silnika. Wraz ze specyficznym terkotaniem daje bardzo dobry efekt.

Cieszę się też, że w mojej maszynie jest wnętrze kabiny, które coraz częściej jest wyposażeniem dodatkowym w trialówkach.
Paka została zbudowana według wymiarów oryginału. Mama uszyła plandekę :-)
Całość jest zawieszona minimalnie wyżej niż w rzeczywistości. Mam nadzieje, że wygląd ciężarówki sprawia dobre wrażenie.
Szczerze mówiąc postarałem się i jestem z tego zadowolony. A jak Wam się podoba?
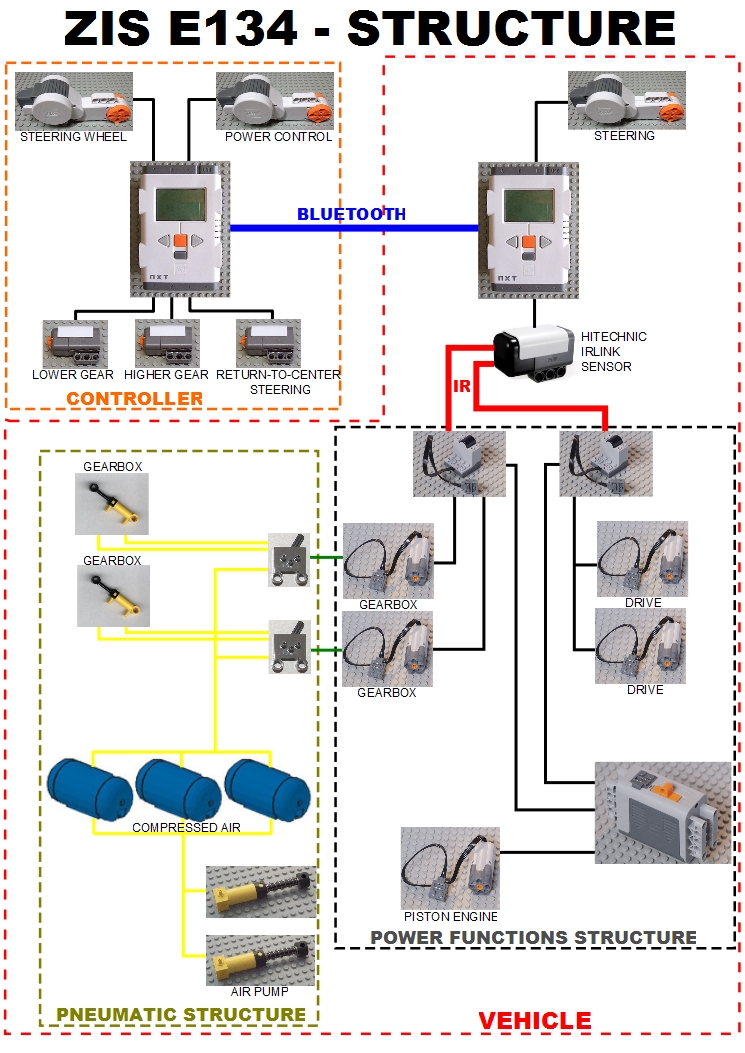
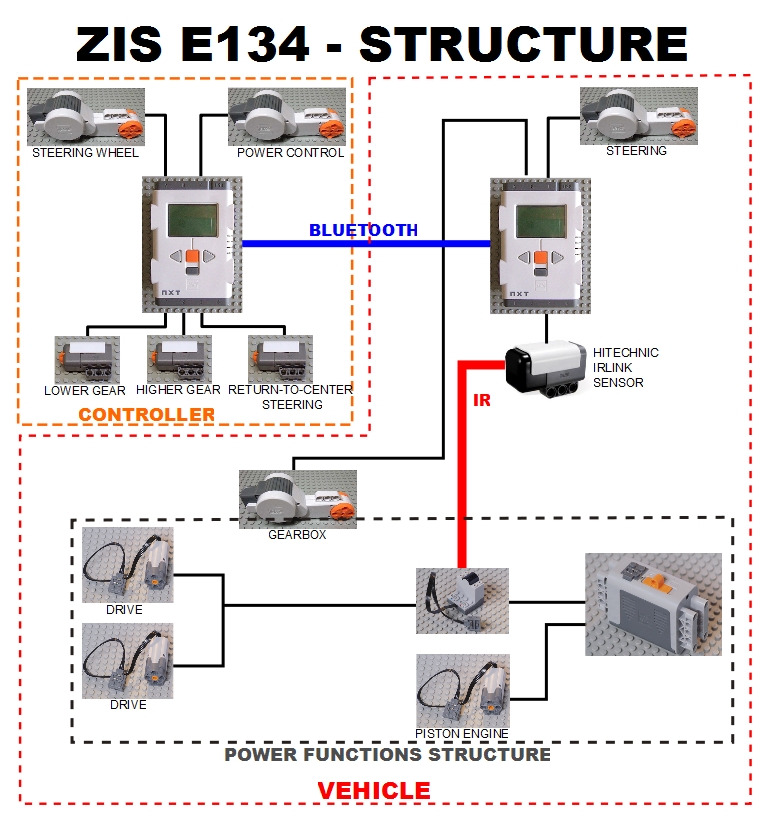
Struktura sterowania maszyną:
Wersja 1 . ........Wersja 2

Ciężarówka jest wyposażona w dwa układy NXT.
Jeden z nich stanowi pilot. Jednostka sterująca zawiera płynna regulację mocy silników napędowych. Skręt sprzężony z gałką w pilocie. Oraz przyciski do zmiany biegów.
Wszystkie parametry wyświetlają się na ekranie NXT.
Dużą zaletą jest komunikacja BLUETOOTH. Zasięg ma kilka metrów oraz nie ma na niego wpływu nasłonecznienie.

Drugi układ NXT jest wbudowany w pojeździe i zarządza wszystkimi funkcjami maszyny. Ponad to w pojeździe jest układ PF, którym również steruje NXT po przez czujnik HITECHNIC IRLink.
Do napędu służą dwa silniki PF medium wbudowane wraz ze skrzynią biegów w ostatni most. Skrzynia biegów w 1 wersji miała 4 biegi i sterowanie pneumatyczne 4 małymi siłownikami wzbudzanymi przez 2 elektrozawory sterowane dwoma PF medium. Układ pneumatyczny był zasilany 3 airtankami.
W drugiej wersji skrzyni biegów są 3 biegi. Udało mi się pozbyć sporej ilości zębatek. Został też usunięty cały układ pneumatyczny, który zastąpiłem jednym silnikiem NXT wbudowanym w ramę. W zmianie biegów pośredniczą cięgna flex system (łączą silnik w ramy z mostem).
Skręt w pojeździe obsługiwany jest przez 1 silnik NXT zamontowany w ramie.
Atrapa silnika napędzana jest jednym silnikiem PF medium.

Zawieszenie:


W pojeździe są dwa tandemy wewnątrz, których mosty są połączone obrotnicą. Oba tandemy są połączone wałem napędowym z kardanów.
Całość jest zawieszona pływająco na axlach. To moje autorskie rozwiązanie (nie widziałem takiego patentu jeszcze).
Ruch zawieszenie powoduje wyginanie axli. Całość jest całkiem stabilna i działa bardzo dobrze.
Oprogramowanie:
Jako, że w układzie ciężarówki są dwie kostki NXT to cała zabawa nie skończyła się na budowie - trzeba było to wszystko jeszcze oprogramować.
Kod programu nie jest zbyt skomplikowany. Nie ma tu zaawansowanych systemów wnioskowania. Jego oprogramowanie polegało na połączeniu odpowiednich elementów i przesyłaniu ich do pojazdu.
Program zawiera ok. 400 lini kodu.
Wnioski:
Ogólnie maszyna ma dość złożoną konstrukcje. Śmiało można powiedzieć, że jak na trialówkę jest bardzo skomplikowana. O unimogu mówiliście, że jest banalny - to jest właśnie odwet :-)
Ja oceniam ten pojazd bardzo dobrze. Spełnia moje oczekiwania. Wszystko udało się ze sobą zgrać i działa bardzo fajnie.
Maszyna wzięła udział tylko w dwóch GP.
Pierwsze moje GPM w tym sezonie wygrałem. Na ostatnich zawodach zająłem 5 miejsce łamiąc przy tym 2 zębatki z16 i kardana. Poza tym maszyna nie była tak sprawna jak na pierwszych zawodach, pomimo kilku znacznych ulepszeń. Zabrakło też mocy.
Może 3 miesiące stania na półce i kurzenia miały w tym udział.
Generalnie ta maszyna to kawał roboty i spora przygoda. Zdobyłem wiele nowych doświadczeń, które zaowocują w przyszłym sezonie :-)
Czekam na Wasze komentarze. Chętnie podyskutuje na jej temat i odpowiem na wszystkie pytania oraz wątpliwości.
Poniżej link do galerii oraz filmy.
Wielkie podziękowania dla Sariela i Liwnika za udostępnienie materiału filmowego i zdjęć.
Link do galerii: http://www.brickshelf.com/cgi-bin/gallery.cgi?f=444723
Zdjęcia z placu budowy: http://www.brickshelf.com/cgi-bin/gallery.cgi?f=444724
Zdjęcia z GPM: http://www.brickshelf.com/cgi-bin/gallery.cgi?f=444726
[youtube]http://www.youtube.com/watch?v=0oi_26DIC1E[/youtube]
[youtube]http://www.youtube.com/watch?v=c3s4tA-xXUg[/youtube]
[youtube]http://www.youtube.com/watch?v=a8J8AnA2Qtk[/youtube]
Dane techniczne:
-napęd 8x8: 2x PF medium
-skrzynia biegów wersja 1: 4 biegi, zmiana biegów pneumatyczna za pomocą 4 małych siłowników, 2 elektrozawory, 3 airtanki
-skrzynia biegów wersja 2: 3 biegi, zmiana biegów jednym silnikiem NXT w ramie po przez flex system do mostu
-skręt 2 przednie osie: 1 silnik NXT w ramie
-atrapa silnika: R6, napęd 1 PF medium
-sterowanie: BLUETOOTH po przez dwa układy NXT + czujnik HITECHNIC IRLink do sterowania PF przez NXT
-zasilanie: 1 BBox, 1 kostka NXT z akumulatorem NXT 2100mAh.
-zawieszenie pływające
-wymiary:
*długość 52cm
*szerokość 20cm
*wysokość 26cm (dach tylnej zabudowy)
.
ZIS e134
Jest to Rosyjski prototyp z 1955 roku. Powstały tylko 4 sztuki. Produkcja nie została uruchomiona z powodu słabej jednostki napędowej (R6, 130KM).
Jednak układ ciężarówki był bardzo obiecujący jeśli chodzi o sprawność w terenie.
Poza tym to pierwsza maszyna w której zastosowano pneumatyczne opony z regulacją ciśnienia z kabiny.
Zdjęcie rzeczywistej maszyny:
Mój model LEGO w skali 1:13:







Wizualnie maszyna nie jest standardowa nawet w rzeczywistości. Jednak ma swój urok i to coś.
Myślę, że jej kształty udało mi się dość dobrze odwzorować. Smyk trochę narzeka na liftarmowe błotniki :-) Jednak jest to dość mocne i praktyczne.
Na szczególną uwagę zasługuje atrapa silnika. Wraz ze specyficznym terkotaniem daje bardzo dobry efekt.

Cieszę się też, że w mojej maszynie jest wnętrze kabiny, które coraz częściej jest wyposażeniem dodatkowym w trialówkach.
Paka została zbudowana według wymiarów oryginału. Mama uszyła plandekę :-)
Całość jest zawieszona minimalnie wyżej niż w rzeczywistości. Mam nadzieje, że wygląd ciężarówki sprawia dobre wrażenie.
Szczerze mówiąc postarałem się i jestem z tego zadowolony. A jak Wam się podoba?
Struktura sterowania maszyną:
Wersja 1 . ........Wersja 2
Ciężarówka jest wyposażona w dwa układy NXT.
Jeden z nich stanowi pilot. Jednostka sterująca zawiera płynna regulację mocy silników napędowych. Skręt sprzężony z gałką w pilocie. Oraz przyciski do zmiany biegów.
Wszystkie parametry wyświetlają się na ekranie NXT.
Dużą zaletą jest komunikacja BLUETOOTH. Zasięg ma kilka metrów oraz nie ma na niego wpływu nasłonecznienie.

Drugi układ NXT jest wbudowany w pojeździe i zarządza wszystkimi funkcjami maszyny. Ponad to w pojeździe jest układ PF, którym również steruje NXT po przez czujnik HITECHNIC IRLink.
Do napędu służą dwa silniki PF medium wbudowane wraz ze skrzynią biegów w ostatni most. Skrzynia biegów w 1 wersji miała 4 biegi i sterowanie pneumatyczne 4 małymi siłownikami wzbudzanymi przez 2 elektrozawory sterowane dwoma PF medium. Układ pneumatyczny był zasilany 3 airtankami.
W drugiej wersji skrzyni biegów są 3 biegi. Udało mi się pozbyć sporej ilości zębatek. Został też usunięty cały układ pneumatyczny, który zastąpiłem jednym silnikiem NXT wbudowanym w ramę. W zmianie biegów pośredniczą cięgna flex system (łączą silnik w ramy z mostem).
Skręt w pojeździe obsługiwany jest przez 1 silnik NXT zamontowany w ramie.
Atrapa silnika napędzana jest jednym silnikiem PF medium.

Zawieszenie:


W pojeździe są dwa tandemy wewnątrz, których mosty są połączone obrotnicą. Oba tandemy są połączone wałem napędowym z kardanów.
Całość jest zawieszona pływająco na axlach. To moje autorskie rozwiązanie (nie widziałem takiego patentu jeszcze).
Ruch zawieszenie powoduje wyginanie axli. Całość jest całkiem stabilna i działa bardzo dobrze.
Oprogramowanie:
Jako, że w układzie ciężarówki są dwie kostki NXT to cała zabawa nie skończyła się na budowie - trzeba było to wszystko jeszcze oprogramować.
Kod programu nie jest zbyt skomplikowany. Nie ma tu zaawansowanych systemów wnioskowania. Jego oprogramowanie polegało na połączeniu odpowiednich elementów i przesyłaniu ich do pojazdu.
Program zawiera ok. 400 lini kodu.
Wnioski:
Ogólnie maszyna ma dość złożoną konstrukcje. Śmiało można powiedzieć, że jak na trialówkę jest bardzo skomplikowana. O unimogu mówiliście, że jest banalny - to jest właśnie odwet :-)
Ja oceniam ten pojazd bardzo dobrze. Spełnia moje oczekiwania. Wszystko udało się ze sobą zgrać i działa bardzo fajnie.
Maszyna wzięła udział tylko w dwóch GP.
Pierwsze moje GPM w tym sezonie wygrałem. Na ostatnich zawodach zająłem 5 miejsce łamiąc przy tym 2 zębatki z16 i kardana. Poza tym maszyna nie była tak sprawna jak na pierwszych zawodach, pomimo kilku znacznych ulepszeń. Zabrakło też mocy.
Może 3 miesiące stania na półce i kurzenia miały w tym udział.
Generalnie ta maszyna to kawał roboty i spora przygoda. Zdobyłem wiele nowych doświadczeń, które zaowocują w przyszłym sezonie :-)
Czekam na Wasze komentarze. Chętnie podyskutuje na jej temat i odpowiem na wszystkie pytania oraz wątpliwości.
Poniżej link do galerii oraz filmy.
Wielkie podziękowania dla Sariela i Liwnika za udostępnienie materiału filmowego i zdjęć.
Link do galerii: http://www.brickshelf.com/cgi-bin/gallery.cgi?f=444723
Zdjęcia z placu budowy: http://www.brickshelf.com/cgi-bin/gallery.cgi?f=444724
Zdjęcia z GPM: http://www.brickshelf.com/cgi-bin/gallery.cgi?f=444726
[youtube]http://www.youtube.com/watch?v=0oi_26DIC1E[/youtube]
[youtube]http://www.youtube.com/watch?v=c3s4tA-xXUg[/youtube]
[youtube]http://www.youtube.com/watch?v=a8J8AnA2Qtk[/youtube]
Dane techniczne:
-napęd 8x8: 2x PF medium
-skrzynia biegów wersja 1: 4 biegi, zmiana biegów pneumatyczna za pomocą 4 małych siłowników, 2 elektrozawory, 3 airtanki
-skrzynia biegów wersja 2: 3 biegi, zmiana biegów jednym silnikiem NXT w ramie po przez flex system do mostu
-skręt 2 przednie osie: 1 silnik NXT w ramie
-atrapa silnika: R6, napęd 1 PF medium
-sterowanie: BLUETOOTH po przez dwa układy NXT + czujnik HITECHNIC IRLink do sterowania PF przez NXT
-zasilanie: 1 BBox, 1 kostka NXT z akumulatorem NXT 2100mAh.
-zawieszenie pływające
-wymiary:
*długość 52cm
*szerokość 20cm
*wysokość 26cm (dach tylnej zabudowy)
.