[IDEA] Power Functions IR Receiver dla NXT
: 2011-01-15, 01:50
Na forum LUGpolu znalazłem kilka metod bezprzewodowego sterowania z udziałem kostki NXT.
Sterowanie NXT za pomocą [URL=http://www.00453005_0000002.pl/forum/viewtopic.php?t=9039&postdays=0&postorder=asc&start=0]BT i palmtopa[/URL] autorstwa cobry,
sterowanie NXT za pomocą BT i drugiej kostki NXT wykonane przez TT,
sterowanie za pomocą NXT z IRLink'iem i IR receivera dzieło djtermoz'a,
albo takie wynalazki z najwyższej półki (telefon komórkowy ->BT->NXT->IRLink->IR Receiver) wykonane przez Atr.
W sieci znalazłem również coś takiego.
Palmptopa jak i IRlinka nie posiadam, komórkę posiadam ale mało kompatybilną z NXT (ale popracujemy również nad tym) więc.... postanowiłem zakupić, przerobić i oprogramować IR Receivera.
A oto efekty.
Przeróbka elektryczna została wykonana zgodnie z instrukcją Philo.
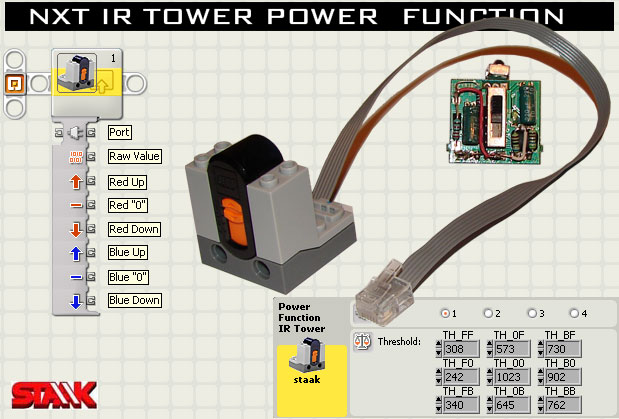
Jedynym odstępstwem było użycie standardowej wtyczki RJ12 (6p6c) i własnej przejściówki do połączenia NXT z wieżą (widać to na trzecim obrazku).
Kabel dołączony do NXT z jednej stony zakończony jest wtyczką "Lego" z drugiej wtyczką RJ12.
Zatrzaski obu wtyczek znajdują się po tej samej stronie kabla (w przeciwnieństwie do standardowego kabla dołączonego do zestawu NXT).
Przejściówka to połączenie dwóch gniazd RJ12 z pełnym krosowaniem (1-6, 2-5, 3-4, 4-3, 5-2, 6-1)
Kabelek dołączony do wieży to 6 żył z taśmy do dysków ATA.
Podobnie jak w przypadku multiplexera czujników dotyku blok umożliwia wprowadzenie własnych wartości progów.
Wartość progu to nic innego jak wartość Raw Value dla odpowiedniej konfiguracji pozycji dźwigienek pilota.
Deskrypcja:
F-dźwigienka pozycja przód
0- neutralna
B- tył
TH_0F = kanał czerwony(lewy) w pozycji neutralnej, kanał niebieski (prawy) dźwigienka w przodzie.
Sygnał wyjściowy z bloku stanowi sześć wyjść typu True/False. Stan True na wyjściu oznacza, odpowiednie położenie dźwigienki (również położenie neutralne).
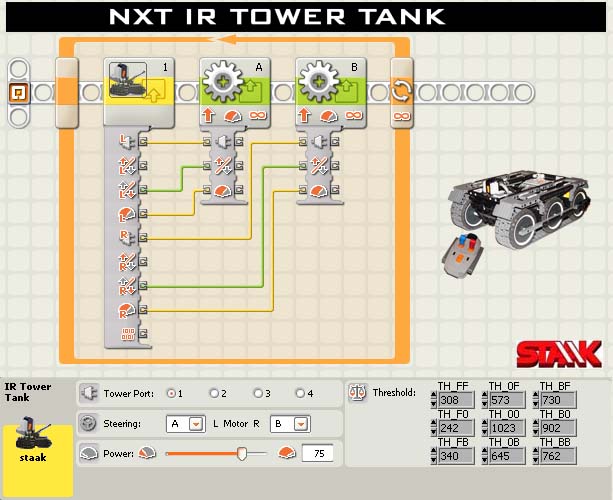
Na bazie bloku NXT IR Tower powstały dwa kolejne bloki "użytkowe".
IR Tower Tank.

Blok umożliwia sterowanie pojazdem typu "czołg".
Opis wydaje się zbędny.
A tak wygląda najprostszy program.

IR Tower Car.
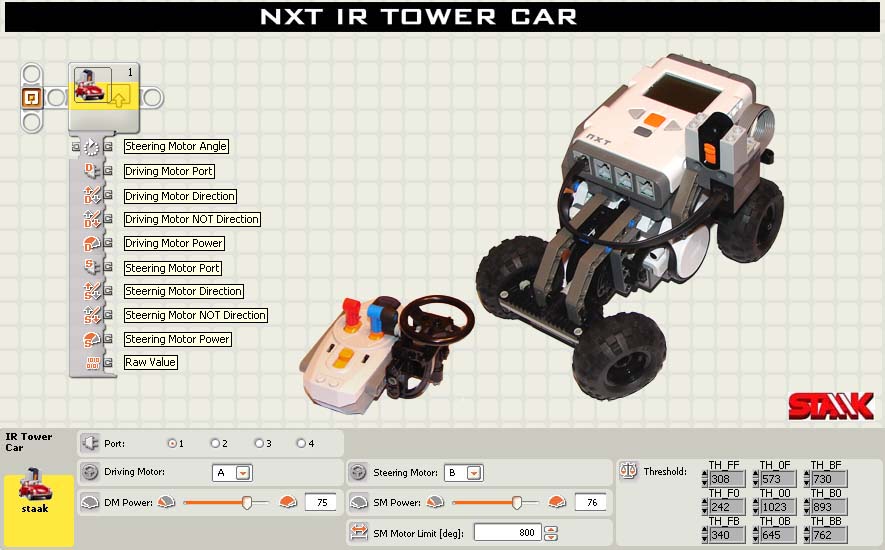
Blok umożliwia sterowanie pojazdem z "osią skrętną".
Dla każdego z napędów można niezależnie ustawić "moc" podawaną przez NXT do danego silnika.
W przypadku kiedy nastawa SM Motor Limit[deg] ustawiona jest na "0" położenie dźwigienki niebieskiej w pozycji PRZÓD/TYŁ skutkuje ciągłym wysterowaniem silnika SM.
W przypadku kiedy nastawa SM Motor Limit[deg] ma wartość różną od "0" wysterowanie silnika SM (dźwigienka niebieska cały czas w pozycji PRZÓD/TYŁ) trwa jedynie do momentu
osiągnięcia przez ten silnik watrości kąta obrotu ustawionej w polu SM Motor Limit[deg].
SM Motor Limit[deg] określa liczbę stopni o jaką obróci się silnik z pozycji "koła na wprost" do pozycji "koła w pozycji pełny skręt".
Ze względu na dynamikę ruchów należy sprawdzić faktyczną liczbę stopni a w pole Limit wstawić wartość o 10% mniejszą (lub pozostaje metoda prób i błędów).
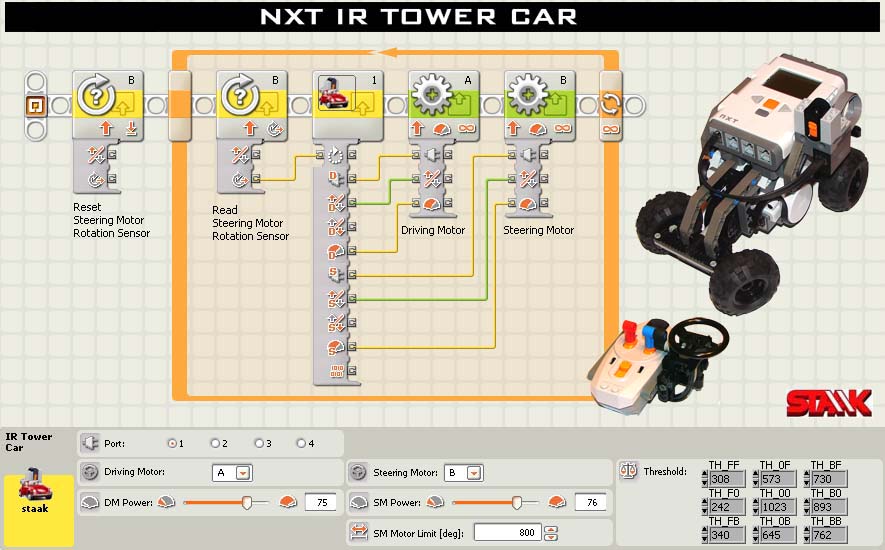
Prawidłowo wygląda to tak:

A tak to działa:
[youtube]http://www.youtube.com/watch?v=E_kGmlfho28[/youtube]
Po ustawieniu i sprawdzeniu progów bloki należy zapisać w projekcie.
Opcja Copy/Paste pozwala na wstawienie bloku do nowego projektu wraz z ustawionymi wcześniej progami.
Bloki można pobrać z ...



Bloki został napisane w LabView z nakładką LabVIEW Toolkit for LEGO MINDSTORMS NXT dostępnych na stronach National Instruments.
Bloki nie są zablokowane hasłami bo...... uważam, że tak być powinno.
Sterowanie NXT za pomocą [URL=http://www.00453005_0000002.pl/forum/viewtopic.php?t=9039&postdays=0&postorder=asc&start=0]BT i palmtopa[/URL] autorstwa cobry,
sterowanie NXT za pomocą BT i drugiej kostki NXT wykonane przez TT,
sterowanie za pomocą NXT z IRLink'iem i IR receivera dzieło djtermoz'a,
albo takie wynalazki z najwyższej półki (telefon komórkowy ->BT->NXT->IRLink->IR Receiver) wykonane przez Atr.
W sieci znalazłem również coś takiego.
Palmptopa jak i IRlinka nie posiadam, komórkę posiadam ale mało kompatybilną z NXT (ale popracujemy również nad tym) więc.... postanowiłem zakupić, przerobić i oprogramować IR Receivera.
A oto efekty.
Przeróbka elektryczna została wykonana zgodnie z instrukcją Philo.
Jedynym odstępstwem było użycie standardowej wtyczki RJ12 (6p6c) i własnej przejściówki do połączenia NXT z wieżą (widać to na trzecim obrazku).
Kabel dołączony do NXT z jednej stony zakończony jest wtyczką "Lego" z drugiej wtyczką RJ12.
Zatrzaski obu wtyczek znajdują się po tej samej stronie kabla (w przeciwnieństwie do standardowego kabla dołączonego do zestawu NXT).
Przejściówka to połączenie dwóch gniazd RJ12 z pełnym krosowaniem (1-6, 2-5, 3-4, 4-3, 5-2, 6-1)
Kabelek dołączony do wieży to 6 żył z taśmy do dysków ATA.
Podobnie jak w przypadku multiplexera czujników dotyku blok umożliwia wprowadzenie własnych wartości progów.
Wartość progu to nic innego jak wartość Raw Value dla odpowiedniej konfiguracji pozycji dźwigienek pilota.
Deskrypcja:
F-dźwigienka pozycja przód
0- neutralna
B- tył
TH_0F = kanał czerwony(lewy) w pozycji neutralnej, kanał niebieski (prawy) dźwigienka w przodzie.
Sygnał wyjściowy z bloku stanowi sześć wyjść typu True/False. Stan True na wyjściu oznacza, odpowiednie położenie dźwigienki (również położenie neutralne).
Na bazie bloku NXT IR Tower powstały dwa kolejne bloki "użytkowe".
IR Tower Tank.
Blok umożliwia sterowanie pojazdem typu "czołg".
Opis wydaje się zbędny.
A tak wygląda najprostszy program.
IR Tower Car.
Blok umożliwia sterowanie pojazdem z "osią skrętną".
Dla każdego z napędów można niezależnie ustawić "moc" podawaną przez NXT do danego silnika.
W przypadku kiedy nastawa SM Motor Limit[deg] ustawiona jest na "0" położenie dźwigienki niebieskiej w pozycji PRZÓD/TYŁ skutkuje ciągłym wysterowaniem silnika SM.
W przypadku kiedy nastawa SM Motor Limit[deg] ma wartość różną od "0" wysterowanie silnika SM (dźwigienka niebieska cały czas w pozycji PRZÓD/TYŁ) trwa jedynie do momentu
osiągnięcia przez ten silnik watrości kąta obrotu ustawionej w polu SM Motor Limit[deg].
SM Motor Limit[deg] określa liczbę stopni o jaką obróci się silnik z pozycji "koła na wprost" do pozycji "koła w pozycji pełny skręt".
Ze względu na dynamikę ruchów należy sprawdzić faktyczną liczbę stopni a w pole Limit wstawić wartość o 10% mniejszą (lub pozostaje metoda prób i błędów).
Prawidłowo wygląda to tak:
A tak to działa:
[youtube]http://www.youtube.com/watch?v=E_kGmlfho28[/youtube]
Po ustawieniu i sprawdzeniu progów bloki należy zapisać w projekcie.
Opcja Copy/Paste pozwala na wstawienie bloku do nowego projektu wraz z ustawionymi wcześniej progami.
Bloki można pobrać z ...
Bloki został napisane w LabView z nakładką LabVIEW Toolkit for LEGO MINDSTORMS NXT dostępnych na stronach National Instruments.
Bloki nie są zablokowane hasłami bo...... uważam, że tak być powinno.