
Pragnę zaprezentować swój kolejny MOC i żeby nie było wątpliwości jest to kolejna maszyna ze stajni Sennebogen, tym razem jest to
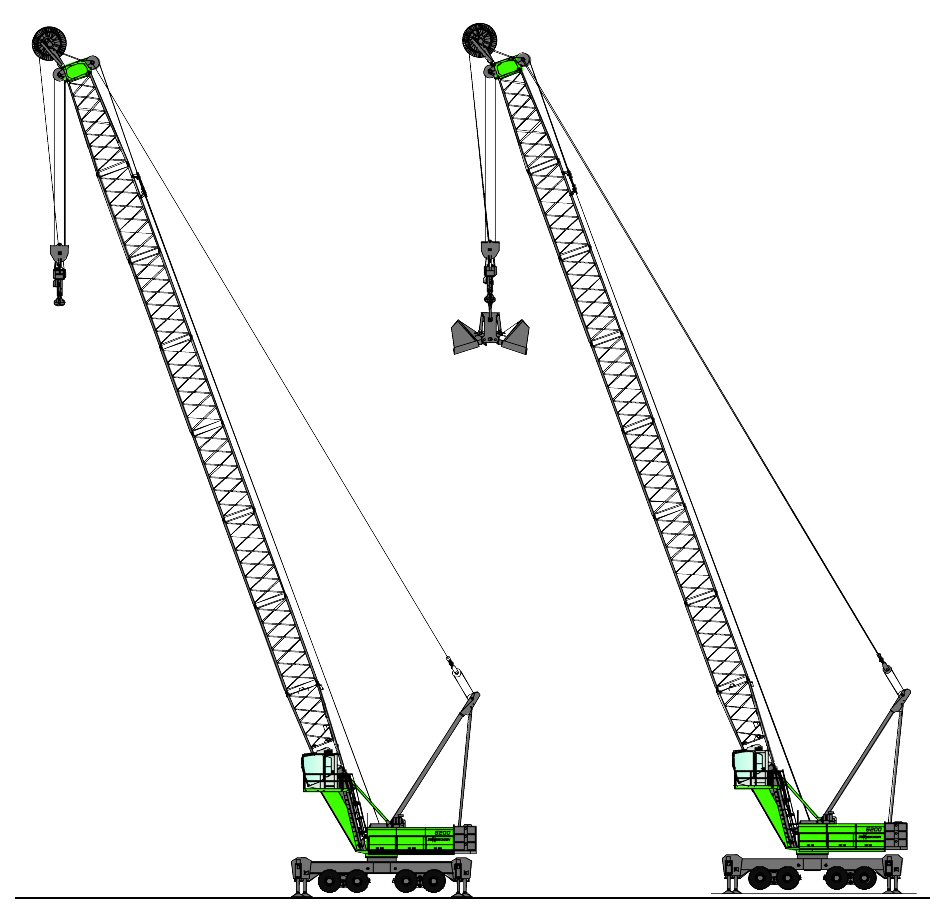
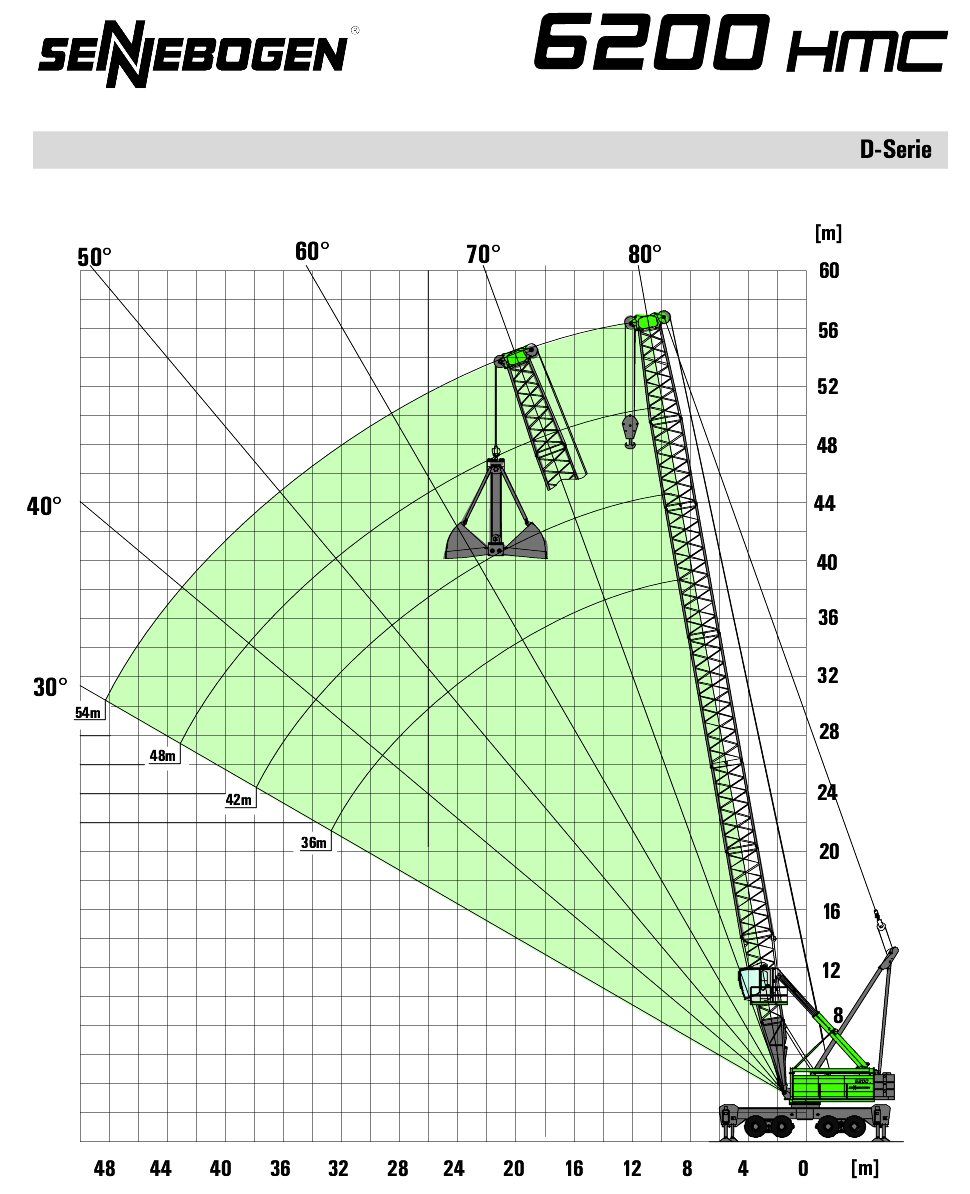
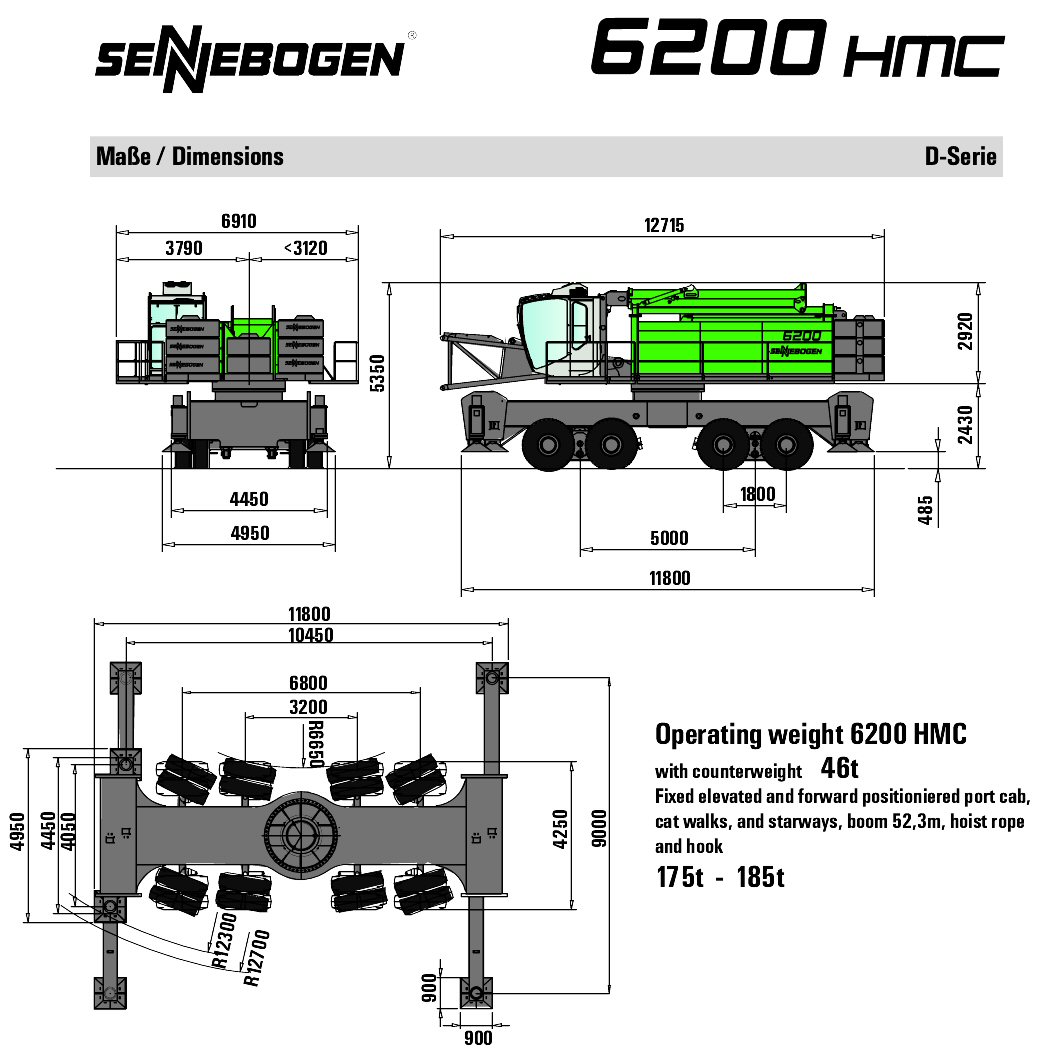
Mobilny Żuraw Portowy Sennebogen 6200 HMC

Jest to jedna z największych mobilnych konstrukcji przeznaczona do portowych prac przeładunkowych. Poniżej krótka charakterystyka maszyny.

Na wstępie
Model powstał na przełomie grudnia 2011 i stycznia 2012, a jego publikację zapowiadałem już w swoim wcześniejszym [url=http://www.00453005_0000002.pl/forum/viewtopic.php?t=16213]poście[/url]:
Model ten planowałem zbudować już jakiś czas temu, ale wizja skonstruowania w pełni mobilnego podwozia i podpór wzorowanych na oryginale nieco mnie przerażała i budowę odkładałem na później, jednak po wizycie w fabryce maszyn i zobaczeniu oryginału podwozia w skali 1:1 postanowiłem nie czekać dłużej i oto jest...Dodatkowo prezentuję model ponieważ ukończyłem już budowę większego brata tego żurawia, a mianowicie model 6200 HMC, więc po publkacji jego recenzji będzie można porównać oba modele i mam nadzieję zauważyć progres w budowaniu.
Dane techniczne
- waga: 5,9 kg
- wysokość: 150 cm
W modelu zostały wykorzystane następujące komponenty:
- 2 x PF XL motor
- 8 x PF M motor
- 2 x Battery Box
- 4 x IR Receiver
- 2 x Extension Wire 50cm
- 4 x Mini Linear Actuator
- 16 x Wheel 62.4x20

Budowa i opis funkcji
Budowę modelu można podzielić na 2 części a mianowicie budowę podwozia i nadwozia.
Budowę modelu rozpocząłem od budowy podwozia. Pierwotnie miała to być jednolita konstrukcja oparta na ramie jak poniżej:

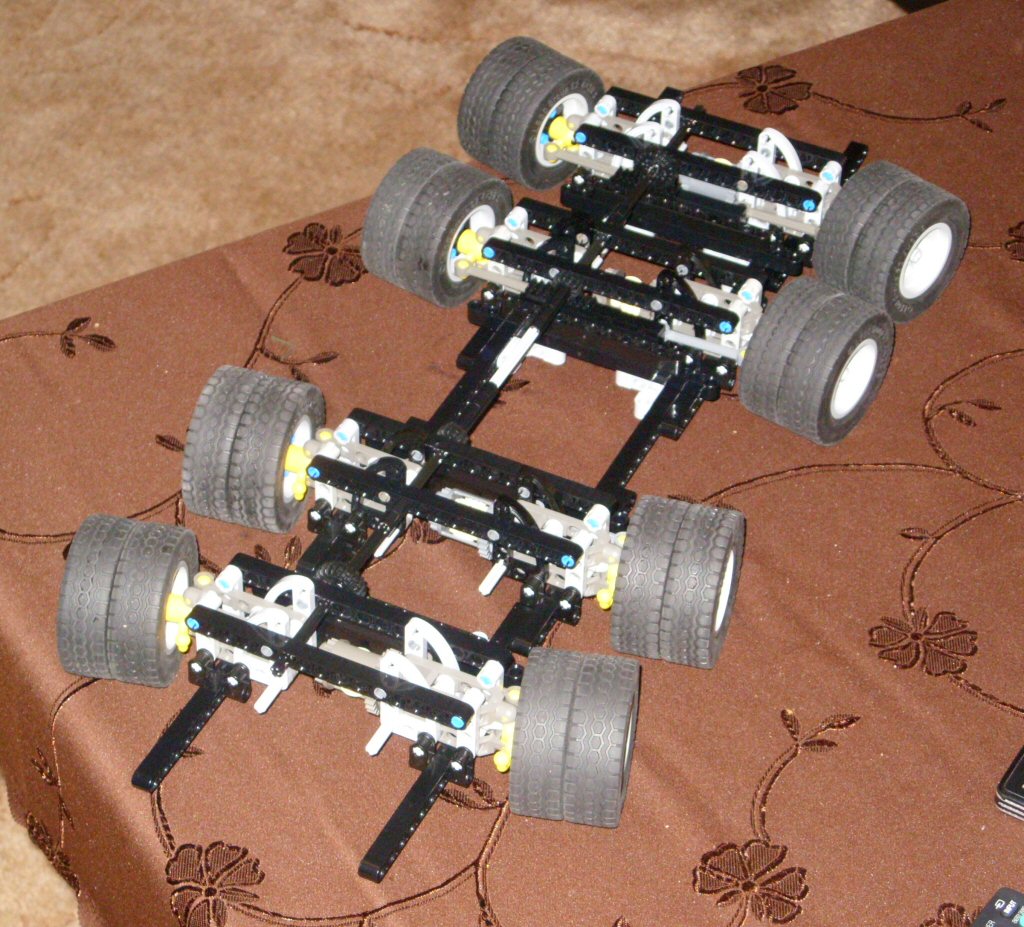
Ostatecznie jedna zdecydowałem się na odwzorowanie podwozia oryginału, które opiera się na 2 jezdnych wózkach kolebkowych
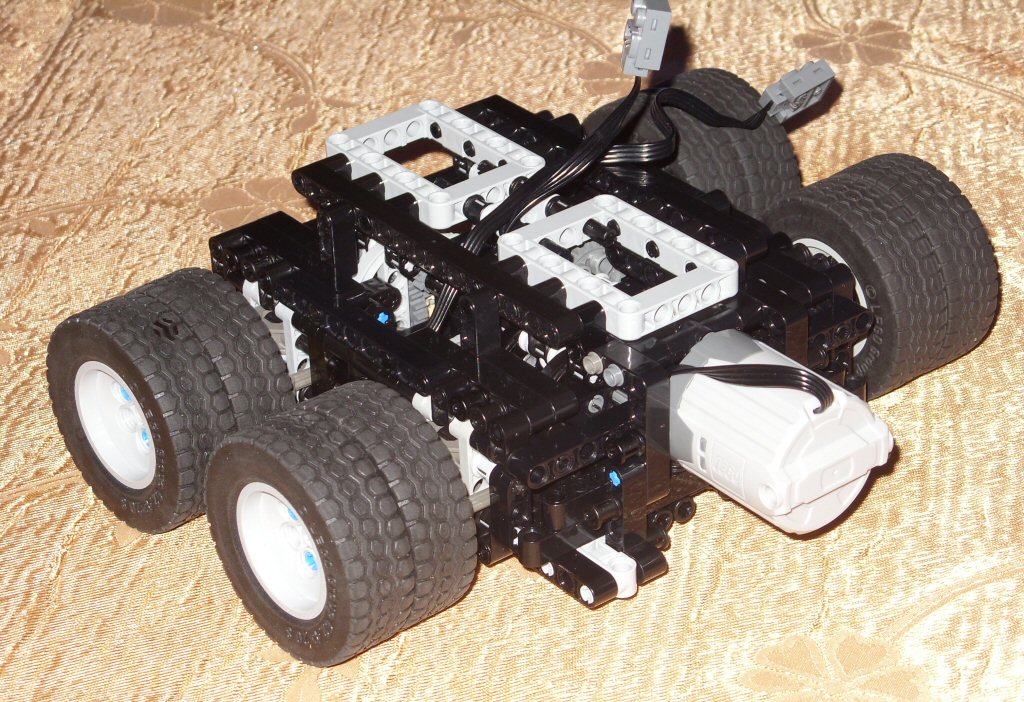
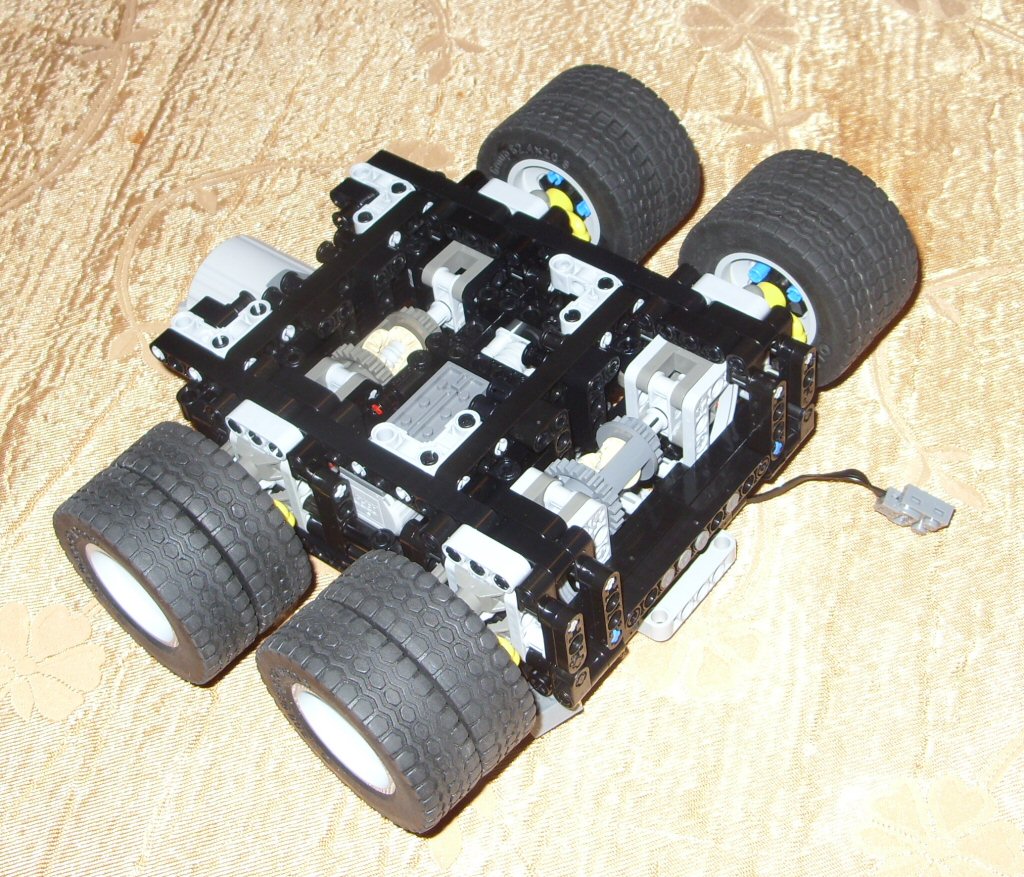
Każda z kolebek składa się z 2 osi napędowych, w każdej kolebce obie osie napędzane są 1 silnikiem XL, dodatkowo obie osie w każdej kolebce są skrętne, skrętem w każdej kolebce steruje 1 slnik M. Po zamontowaniu kolebek w podwoziu otrzymujemy bazę maszyny o 4 osiach napędowych, 4 osiach skrętnych, przy czym osie zewnętrzne i wewnętrzne mają różny promień skrętu a dodatkowo mamy zawieszenie kolebkowe, które pozwala maszynie na pokonywanie drobnych nierówności (film 1:35 -> 2:15)
Kolejna funkcja w podwoziu to rozkładanie i składanie podpór stabilizujących. Założenie moje było takie aby ich funkcjonalnosć w pełni odwzorowywała oryginał i mogła być zdalnie sterowana. Problem jednak polega na tym, że po wysunięciu podpór ciężko jest przenieść na ich koniec napęd do opuszczania "stóp". Rozwiązanie udało się jednak znaleść i powstały takie oto 2 podzespoły odpowiedzialne za rozkładanie podpór.
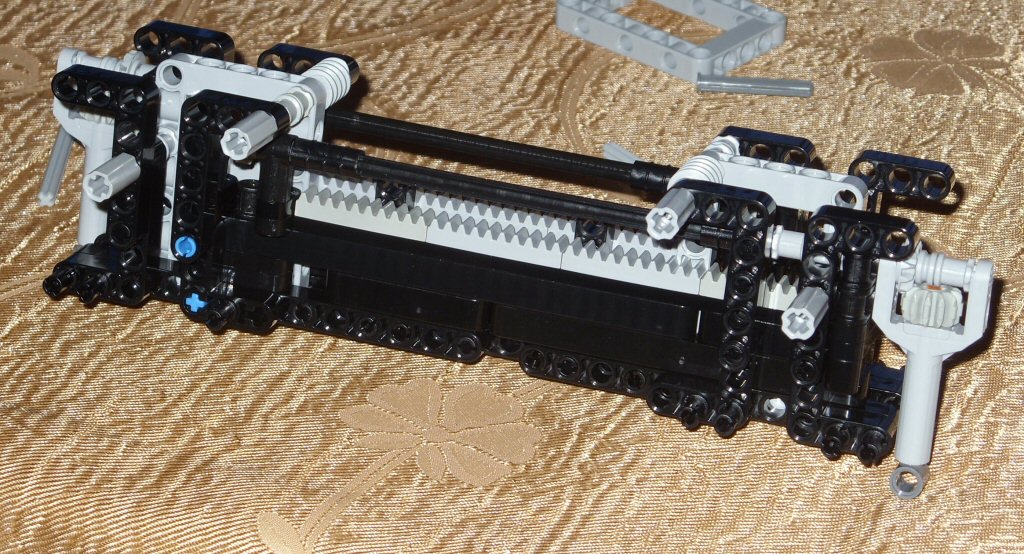


Zasada działania jest taka, że wraz z podporą wysuwa się również wał napędzający mini linear actuator odpowiedzialny za opuszczanie "stopy" stabilizatora. Po osiągnięciu granicznego wysunięcia zębatka z8 zamontowana na końcu wału napędowego miniLA zazębia się ze ślimakiem, który wprawia w ruch miniLA i powoduje, że "stopy" stabilzujące się opuszczają. Rozwiązanie takie zdaje egzamin, należy jedynie pamiętać, że "stopy" stabilizujące mogą być opuszczone wyłączie przy pełnym wysunięciu podpór.
Za rozkładanie podpór odpowiedzialne są 2 silniki M, jeden z nich wysuwa naraz wszystkie 4 podpory, drugi z nich zaś opuszcza naraz wszystkie "stopy" podpór.
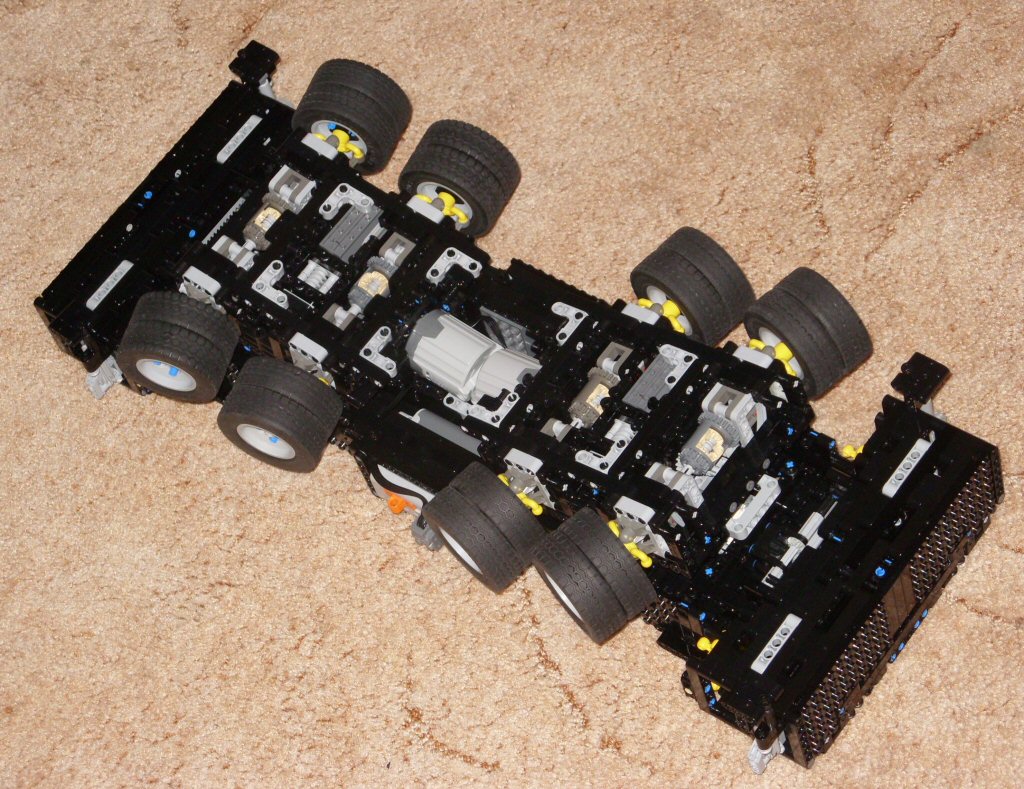
Po zabudowaniu wszystkich mechanizmów otrzymałem podwozie, które wygląda tak:

Wszystkie funkcje podwozia czyli jazda, skręt i rozkładanie podpór zasila jeden battery box.
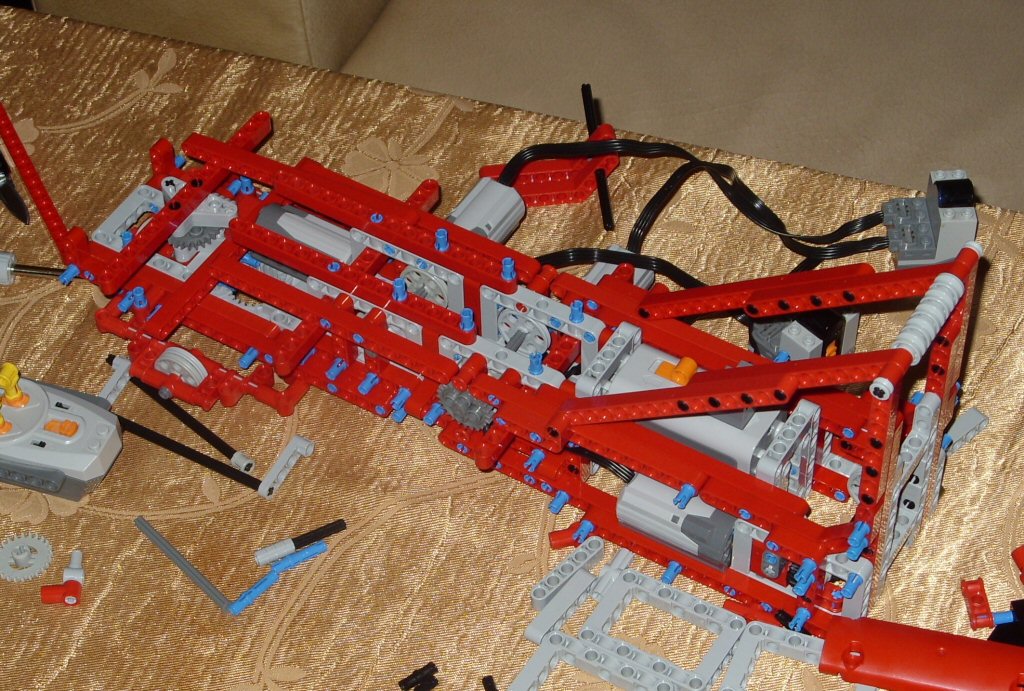
NADWOZIE
Nadwozie maszyny zbdowałem w kolorze czerwonym. Rozważałem jeszcze kolor szary i żółty, ale szary model dopiero co zbudowałem, a na żółty nie miałem dostatecznie dużej ilości paneli.
Co do funkcji - budowa nadwozia nie jest skomplikowana pod względem złożoności mechniczmej ponieważ jest to model maszyny linowej i wszystkie funkcje robocze obsługiwane są za pomocą linek.
W nadwoziu mamy więc schowany 1 silniczek M, który jest odpowiedzialny za obrót nadwozia względem podwozia i 3 silniczki M odpowiedzialne za ruch wysięgnika i łyżki łupinowej. Wszystkie silniczki zasilane są jednym battery boxem, jest to już drugi battery box więc mamy możliwość nieograniczonego obrotu maszyny.
W związku z faktem, iż nadwozie jest niezwykle masywne oraz tym, że wysięgnik jest dość długi i ma sporą bezwładność postanowiłem dość mocno spowolnić funkcję obrotu stosując odpowiednie przełożenie. Dodatkowo zastosowałem wzmocnienie obrotnicy podobne do tego zastowowanego w moim wcześniejszym modelu.

Opuszczanie/podnoszenie wysięgnika realizuje silniczek M, który napędza rolkę linki zaczepionej do wysięgnika.
Jednym z ciekawszych pomysłów zastosowanych w modelu było zbudowanie łyżki łupinowej z 2 elementów Technic Excavator Bucket 18 x 10 i nadanie jej ruchów za pomocą 2 linek.

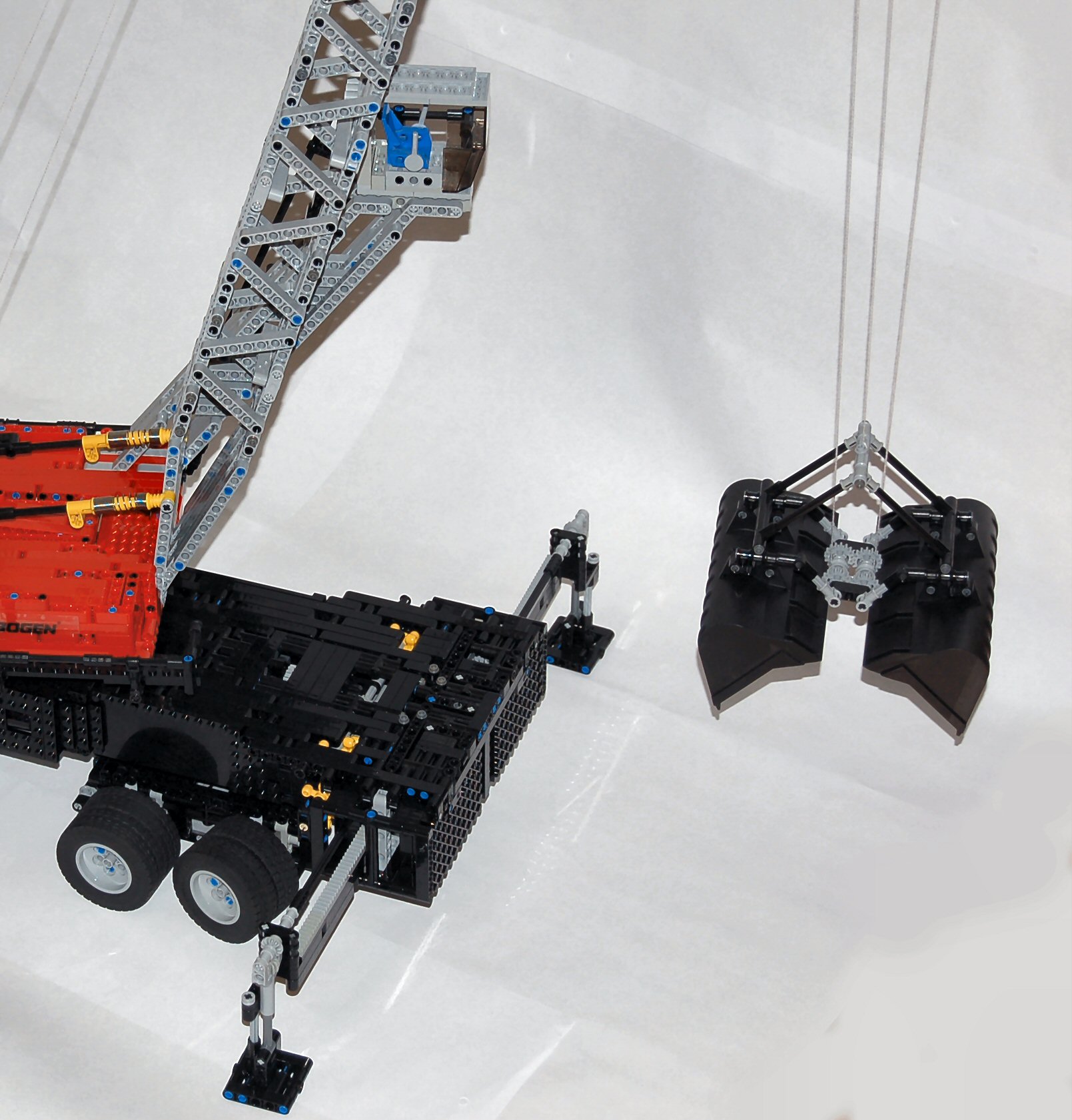

Podnoszenie/opuszczanie łyżki działa na zasadzie bloczka ruchomego, natomiast otwieranie/zamykanie łyżki polega na zwykłym pociagnięciu/zwolnieniu drugiej linki. W związku z powyższym aby w praktyce podnieść lub opuścić np. zamkniętą łyżkę rolka z linką odpowiedzialną za podnoszenie/opuszczanie czerpaka porusza się 2 razy szybciej od rolki linki odpowiedzialnej za otwieranie/zamykanie.
W konstrukcji nadwozia pragnę również zwrócić uwagę na estetyczny wizerunek tyłu maszyny - postanowiłem zbudować imitację obciążników przeciwwagi i wygląda to tak:

Podsumowanie
Udało się zbudować model jak dotąd najcięższy i największy gabarytowo w moim dorobku. Dodatkowo udało się znaleść rozwiązanie dla kilku mniej lub bardziej skomplikowanych technicznie zagadnień. Kolejnym plusem jest to, że udało się znaleść nowe zastosowanie dla Technic Excavator Bucket 18 x 10 i wprowadzić je w życie.
Jeśli chodzi o całokształt to model uważam za udany - jest bawialny i odwzorowuje oryginał. Dodatkowo (jedni uważają to za plus, inni za minus konstrukcji Technic) - model nie ma żadnyc zbędnych dziur, zarówno podwozie jak i nadwozie udało się estetycznie zabudować.
PS: nie jest to moje ostatnie słowo w temacie maszyn przeładunkowych Sennebogen :)
Galeria na Brickshelfie
FILM



