[MOC] Bugatti Type 35
: 2012-09-23, 19:10
Uwaga, będzie brzydko.

Dane techniczne:
Wymiary: dł. 60s / szer. 20s / wys. 18s
Waga: 1,385 kg
Zawieszenie: przód - kolebka, tył - oś wleczona
Napęd: 4xRC na tylną oś, bezpośrednio
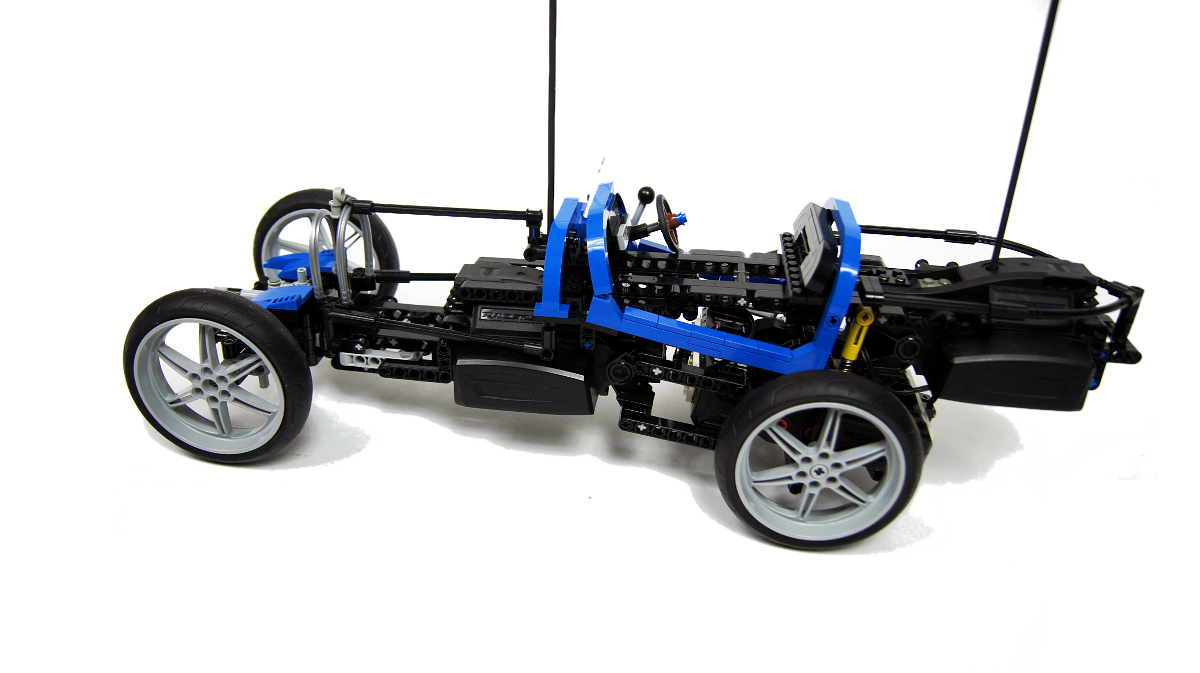
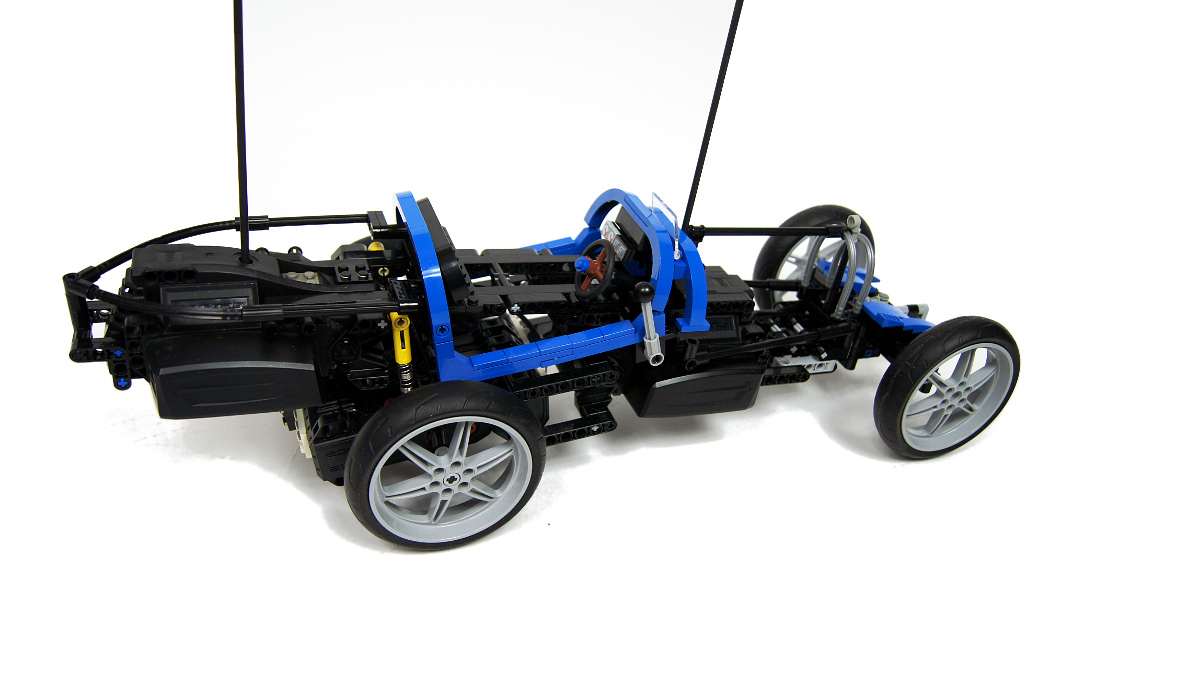
Przestawiam eksperyment pt. "szybciej niż Zondą". To pokraczne paskudztwo to efekt szukania prostego, małego samochodu w który mógłbym napakować dużo silników RC. Padło na Bugatti Type 35, bo mały, prosty i z fajnymi kołami. Od początku założeniem była minimalna waga, stąd tak szpetna karoseria. Powiedzmy, że chciałem zrobić sam jej szkielet, jak w Zondzie, ale nie tak samo jak w Zondzie, więc użyłem tradycyjnych klocków. Teraz już wiem, że nie powinienem :P
Oprócz bycia bardzo brzydkim model jest bardzo prosty. Dwa moduły RC ulokowane są jeden za drugim w prostej liftarmowej ramie, z silnikami pomiędzy, podwieszonymi na dwóch amorach. W ten sposób silniki tworzą prostą tylną oś, pozbawioną dyferencjału i jakichkolwiek zębatek, a za to złożoną z dwóch półosi - każdej napędzanej przez 2 silniki po danej stronie. Przedni moduł RC obsługuje też skręt przez swoje standardowe wyjście, wyprowadzone na przednią oś osadzoną na prostej kolebce. Kolebki użyłem bo to był jedyny rodzaj zawieszenia dający odpowiedni wygląd przedniego zawieszenia, a myśl o braku zawieszenia w ogóle jakoś mi się nie widziała. Kolebka nie jest niczym stabilizowana, dzięki czemu model robi ładne rolki.
Tak, skręt jest z autocentrowaniem, bo na pchanie czegoś normalnego nie było miejsca. No dobrze, tak naprawdę potajemnie kocham autocentrowanie i musiałem go użyć, a Smyk jeździ na filmie zygzakiem z przepicia, wcale nie dlatego że takie sterowanie ssie.
Model jedną rzecz robi dobrze - pokazuje co dawało zawieszenie niezależne i napęd 4x4 w Zondzie. Tam było stabilnie i model jechał gdzie powinien jak po sznurku, tu natomiast mamy żywioł nie do okiełznania, z niedociążonym przodem i wysokim środkiem ciężkości. Jeżdżenie tym to taka trochę loteria i walka z przeznaczeniem, co nie zmienia faktu, że da się wykręcić fajne figury, a Smyk świetnie się bawił wjeżdżając w krzaki (liczył że je przebije, a za nimi było jeziorko).
Z powodu ogólnego nieokiełznania modelu i jego tendencji do dezintegracji (po 5 minutach większość karoserii miałem w kieszeniach) nie udało się zmierzyć prędkości maksymalnej. Chciałem użyć do tego telefonu z GPSem żeby zrobić to dokładnie, ale przeszło mi jak przy pierwszej próbie telefon trzepnął w krawężnik przy 12 km/h.
Serdeczne podziękowania dla Smyka za niezawodną pomoc, i dla dwóch pań z parku za to że się dały prawie rozjechać.
W tym miejscu chciałbym przeprosić i obiecać poprawę. Nie przegapcie końcówki filmu - pokazuje ona dlaczego tak lubię filmować ze Smykiem ;)
Galeria
Zdjęcia (tak, on naprawdę jest taki brzydki):





Film:
[youtube]http://www.youtube.com/watch?v=jj2QbLLzFoo[/youtube]

Dane techniczne:
Wymiary: dł. 60s / szer. 20s / wys. 18s
Waga: 1,385 kg
Zawieszenie: przód - kolebka, tył - oś wleczona
Napęd: 4xRC na tylną oś, bezpośrednio
Przestawiam eksperyment pt. "szybciej niż Zondą". To pokraczne paskudztwo to efekt szukania prostego, małego samochodu w który mógłbym napakować dużo silników RC. Padło na Bugatti Type 35, bo mały, prosty i z fajnymi kołami. Od początku założeniem była minimalna waga, stąd tak szpetna karoseria. Powiedzmy, że chciałem zrobić sam jej szkielet, jak w Zondzie, ale nie tak samo jak w Zondzie, więc użyłem tradycyjnych klocków. Teraz już wiem, że nie powinienem :P
Oprócz bycia bardzo brzydkim model jest bardzo prosty. Dwa moduły RC ulokowane są jeden za drugim w prostej liftarmowej ramie, z silnikami pomiędzy, podwieszonymi na dwóch amorach. W ten sposób silniki tworzą prostą tylną oś, pozbawioną dyferencjału i jakichkolwiek zębatek, a za to złożoną z dwóch półosi - każdej napędzanej przez 2 silniki po danej stronie. Przedni moduł RC obsługuje też skręt przez swoje standardowe wyjście, wyprowadzone na przednią oś osadzoną na prostej kolebce. Kolebki użyłem bo to był jedyny rodzaj zawieszenia dający odpowiedni wygląd przedniego zawieszenia, a myśl o braku zawieszenia w ogóle jakoś mi się nie widziała. Kolebka nie jest niczym stabilizowana, dzięki czemu model robi ładne rolki.
Tak, skręt jest z autocentrowaniem, bo na pchanie czegoś normalnego nie było miejsca. No dobrze, tak naprawdę potajemnie kocham autocentrowanie i musiałem go użyć, a Smyk jeździ na filmie zygzakiem z przepicia, wcale nie dlatego że takie sterowanie ssie.
Model jedną rzecz robi dobrze - pokazuje co dawało zawieszenie niezależne i napęd 4x4 w Zondzie. Tam było stabilnie i model jechał gdzie powinien jak po sznurku, tu natomiast mamy żywioł nie do okiełznania, z niedociążonym przodem i wysokim środkiem ciężkości. Jeżdżenie tym to taka trochę loteria i walka z przeznaczeniem, co nie zmienia faktu, że da się wykręcić fajne figury, a Smyk świetnie się bawił wjeżdżając w krzaki (liczył że je przebije, a za nimi było jeziorko).
Z powodu ogólnego nieokiełznania modelu i jego tendencji do dezintegracji (po 5 minutach większość karoserii miałem w kieszeniach) nie udało się zmierzyć prędkości maksymalnej. Chciałem użyć do tego telefonu z GPSem żeby zrobić to dokładnie, ale przeszło mi jak przy pierwszej próbie telefon trzepnął w krawężnik przy 12 km/h.
Serdeczne podziękowania dla Smyka za niezawodną pomoc, i dla dwóch pań z parku za to że się dały prawie rozjechać.
W tym miejscu chciałbym przeprosić i obiecać poprawę. Nie przegapcie końcówki filmu - pokazuje ona dlaczego tak lubię filmować ze Smykiem ;)
Galeria
Zdjęcia (tak, on naprawdę jest taki brzydki):



Film:
[youtube]http://www.youtube.com/watch?v=jj2QbLLzFoo[/youtube]