[MOC] Automatyczne krosno tkackie - LOOM MACHINE
: 2013-02-01, 07:36
Krosno tkackie [wikipedia] - urządzenie, mechaniczne (maszyna) lub ręczne, do tworzenia (produkcji) tkanin.
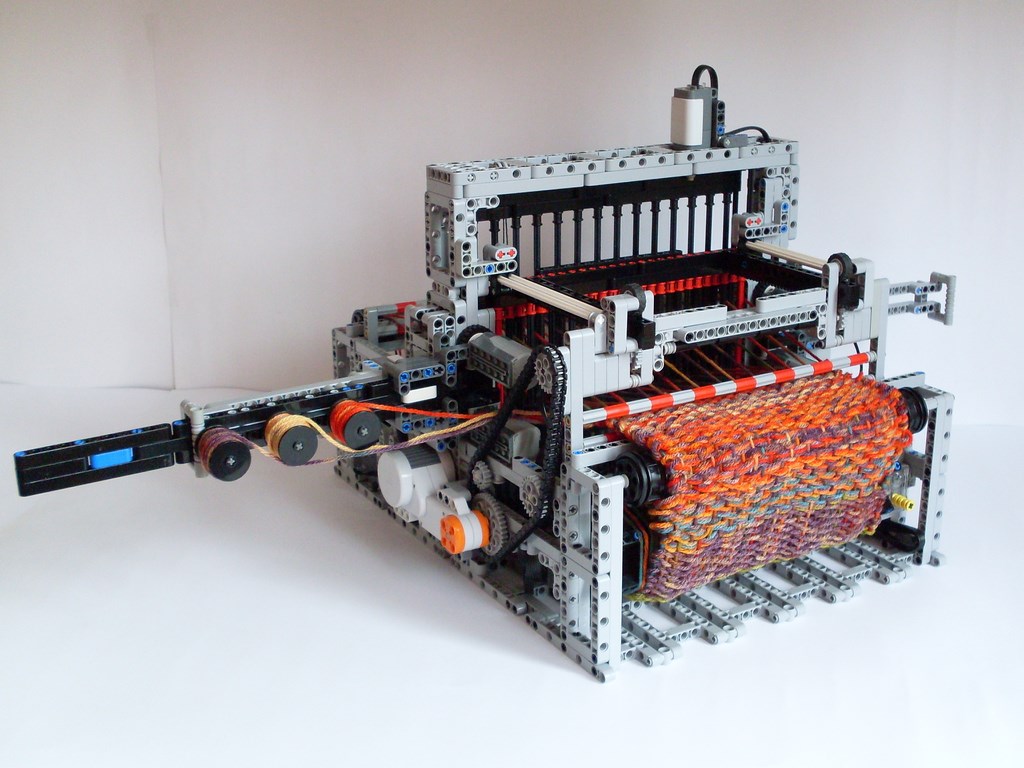
Przedstawiam moją najnowszą konstrukcję - automatyczne krosno tkackie LEGO Mindstorms.





DANE TECHNICZNE
-masa: 2919g (bez nici)
-przestrzeń robocza: 40x82cm
-szerokość tkaniny: 20cm (27 nici wzdłużnych)
-wydajność: 360cm tkaniny na godzinę (780 rzędów nici poprzecznych)
-ilość ramek liftarm: 47
-elementy PF: 1x batbox, 1x odbiornik V1, 2x PF XL, 4x PF medium, 1x switch
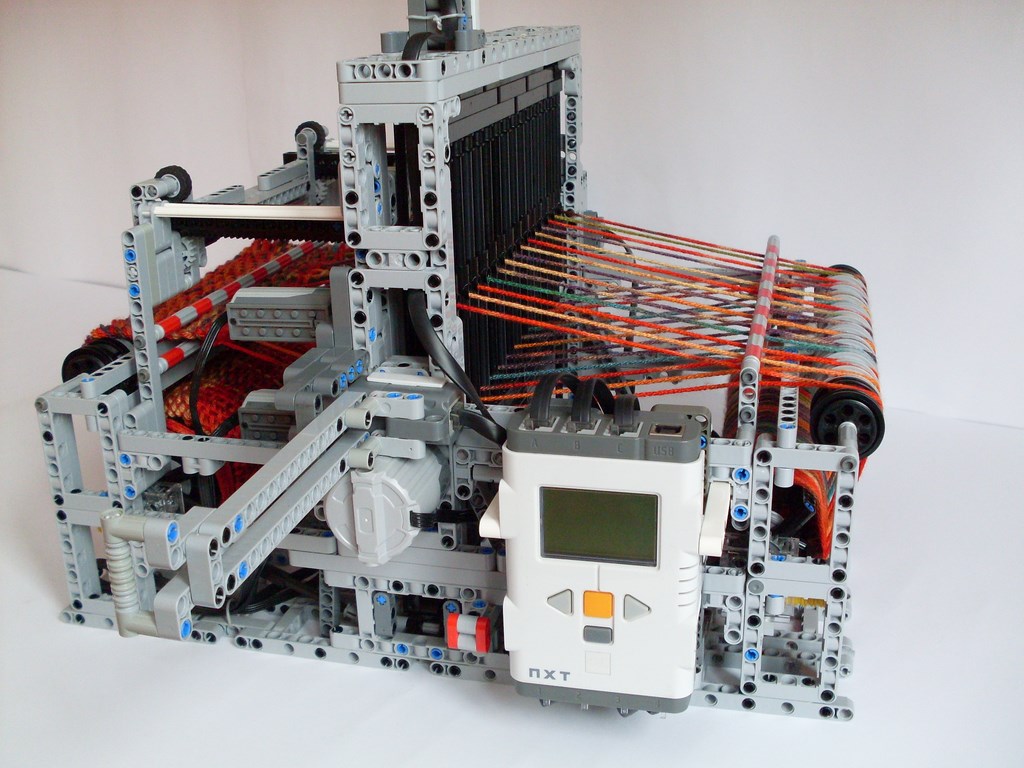
-elementy NXT: 1x kostka NXT, 2x serwomotor, 1x czujnik światła, 1x czujnik koloru, 1x czujnik dotyku
-elementy HiTechnic: 1x IrLink
OPIS KONTRUKCJI (nieobowiązkowe dla castlowców)
Proces powstawania tkaniny wymaga wykonania 4 procedur:
1. Przewinąć poprzeczną nić przez przesmyk.
2. Docisnąć poprzeczną nić do reszty tkaniny.
3. Zablokować/zapleść poprzeczną nić za pomocą nici wzdłużnych.
4. Nawinąć nowopowstały fragment tkaniny na zwój.
Ad. 1

Czarna przelotka z 3 zwojami nici musi się przedostać na drugą stronę tkaniny. Cały element jest przesuwany przez 4 silniki PF medium (po 2 na stronę). Silniki są podłączone do wieży IR PF, która jest sterowana przez kostkę NXT dzięki czujnikowi HiTechnic IRLink.
W tym etapie biorą też udział 2 czujniki koloru rozpoznające pozycję przelotki dzięki wbudowanym w nią 2 liftarmą w kolorze białym oraz niebieskim.
Ad. 2

Za docisk nowego rzędu nici odpowiada grzebień zbudowany z 26 axli zamontowanych na pinach z bushem. Grzebień przesuwa się po białych axlach 16 dzięki dwom listwą zębatym. Cały mechanizm napędzany jest za pośrednictwem łańcucha przez serwomotor NXT. Dzięki enkoderowi znana jest aktualna pozycja grzebienia.
Ad. 3

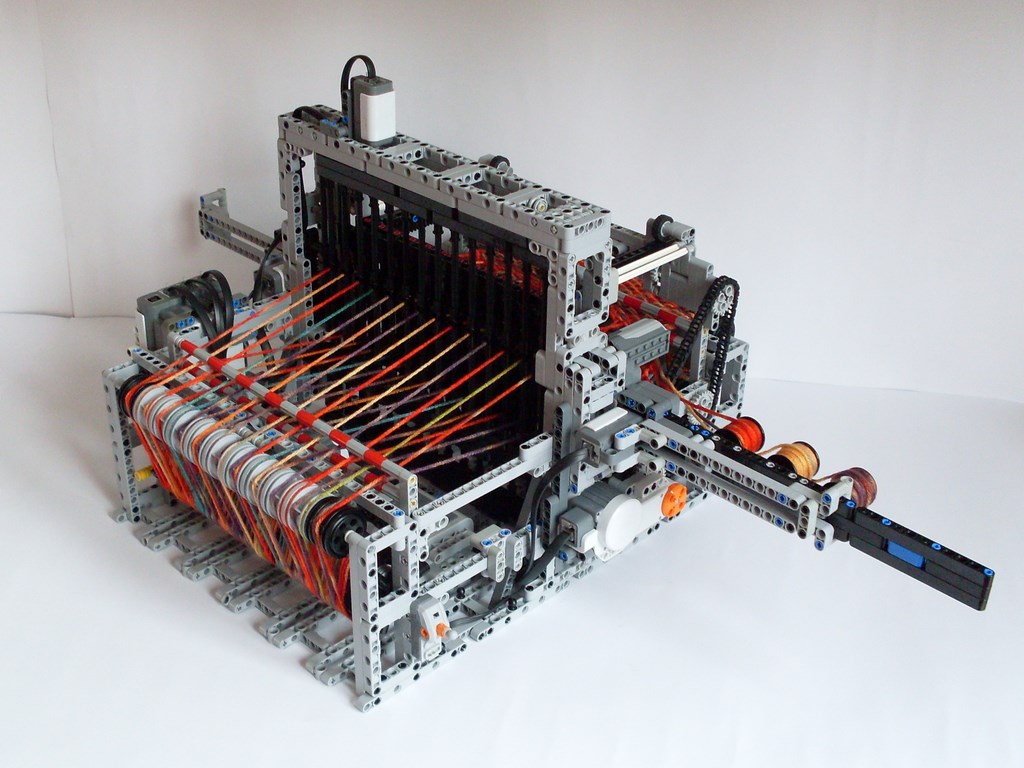
Żeby zablokować nowy rząd nici należy go zapleść po przez skrzyżowanie nici wzdłużnych.
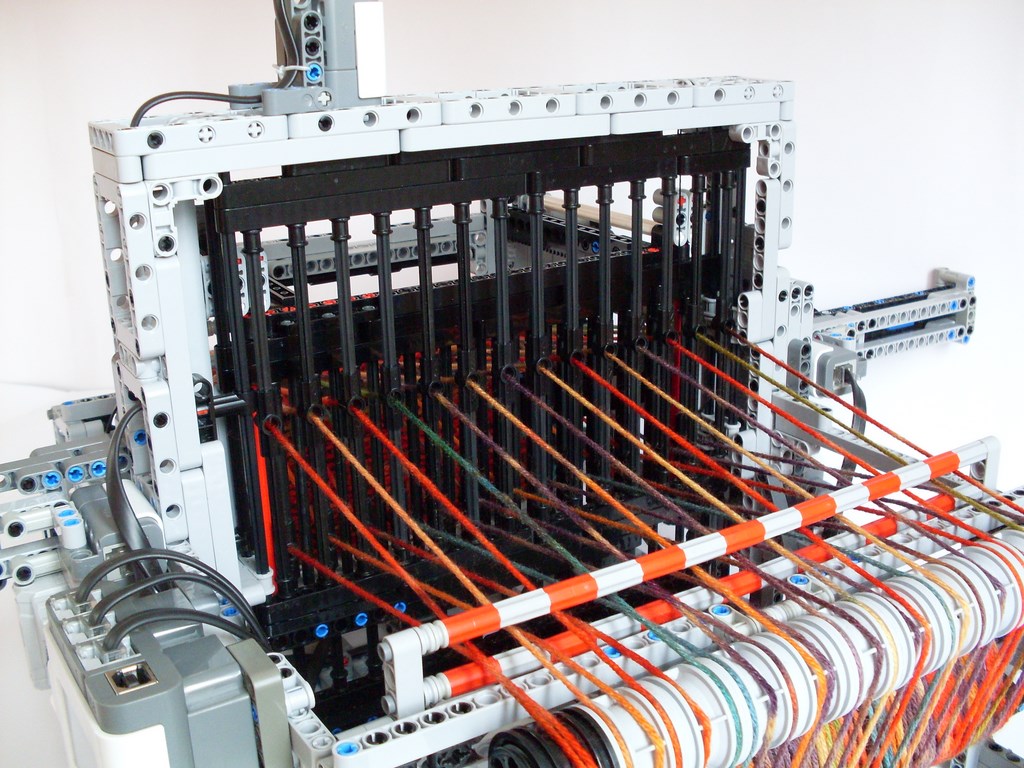
Każda z 27 nici wzdłużnych przewinięta jest przez tzw. nicielnicę – w mojej konstrukcji elementy te stanową axle and pin connectory angeled #2 tworzące dwie kratownice. Każda kratownica zamontowana jest do listwy zębatej 13. Listwy te są napędzane wspólną zębatką dzięki silnikowi XL. Za rozpoznanie pozycji kratownic odpowiada czujnik dotyku zamontowany na samej górze konstrukcji.
Ad.4


Konstrukcja posiada dwa duże zwoje: do nawijania powstałej tkaniny oraz magazynujący nicie wzdłużne. Zwoje te są ze sobą połączone za pośrednictwem wału, który jest napędzany przez serwomotor NXT. Wraz z każdym nowopowstałym rzędem nici zwoje przesuwają się. Dzięki możliwości regulowania kąta nawinięcia możemy otrzymywać tkaninę o różnej gęstości nici poprzecznych.
OPIS OPROGRAMOWANIA (nieobowiązkowe dla castlowców)
Program sterownika NXT napisałem w RobotC. Łącznie 377 linii kodu.
Menu programu składa się z kilku zakładek:
1. POMOC - krótki opis obsługi maszyny.
2. INICJALIZACJA - kalibracja wszystkich elementów maszyny tj. automatyczne ustawienie przelotki, docisku i kratownic w odpowiedniej pozycji.
3. TKANIE - proces produkcji tkaniny. Po wejściu do tego menu mamy możliwość ustawienia rozmiaru/odległości pomiędzy kolejnymi rzędami nici poprzecznej, co ma wpływ na gęstość powstającej tkaniny. Zaprogramowych jest 6 rozmiarów. Po zatwierdzeniu maszyna rozpoczyna tkanie. Uwaga – jeśli nie wykonano wcześniej inicjalizacji to maszyny uruchomi ją automatycznie przed rozpoczęciem tkania.
W trakcie tkania na ekranie menu wyświetlana jest ilość przewiniętych rzędów nici w tym cyklu.
4. NAWIJANIE - możliwość manualnego przewijania zwojów z tkaniną za pomocą strzałek klawiatury NXT.
5. BATERIA - sprawdzanie poziomu naładowania baterii.
6. WYJŚCIE - wyłączenie programu.
PODSUMOWANIE
Szalik ma 160cm długości. Powstał z ok. 240 metrów nici. Teoretyczny czas wykonania wynosi 27 minut. Tkanina nie jest jednolicie gęsta, gdyż jest to efekt wszystkich testów maszyny.



GALERIA
http://www.brickshelf.com/gallery/TT/NXT/LoomMachine/
VIDEO
[youtube]http://www.youtube.com/watch?v=IPIJsdvDjsc[/youtube]
Przedstawiam moją najnowszą konstrukcję - automatyczne krosno tkackie LEGO Mindstorms.


DANE TECHNICZNE
-masa: 2919g (bez nici)
-przestrzeń robocza: 40x82cm
-szerokość tkaniny: 20cm (27 nici wzdłużnych)
-wydajność: 360cm tkaniny na godzinę (780 rzędów nici poprzecznych)
-ilość ramek liftarm: 47
-elementy PF: 1x batbox, 1x odbiornik V1, 2x PF XL, 4x PF medium, 1x switch
-elementy NXT: 1x kostka NXT, 2x serwomotor, 1x czujnik światła, 1x czujnik koloru, 1x czujnik dotyku
-elementy HiTechnic: 1x IrLink
OPIS KONTRUKCJI (nieobowiązkowe dla castlowców)
Proces powstawania tkaniny wymaga wykonania 4 procedur:
1. Przewinąć poprzeczną nić przez przesmyk.
2. Docisnąć poprzeczną nić do reszty tkaniny.
3. Zablokować/zapleść poprzeczną nić za pomocą nici wzdłużnych.
4. Nawinąć nowopowstały fragment tkaniny na zwój.
Ad. 1
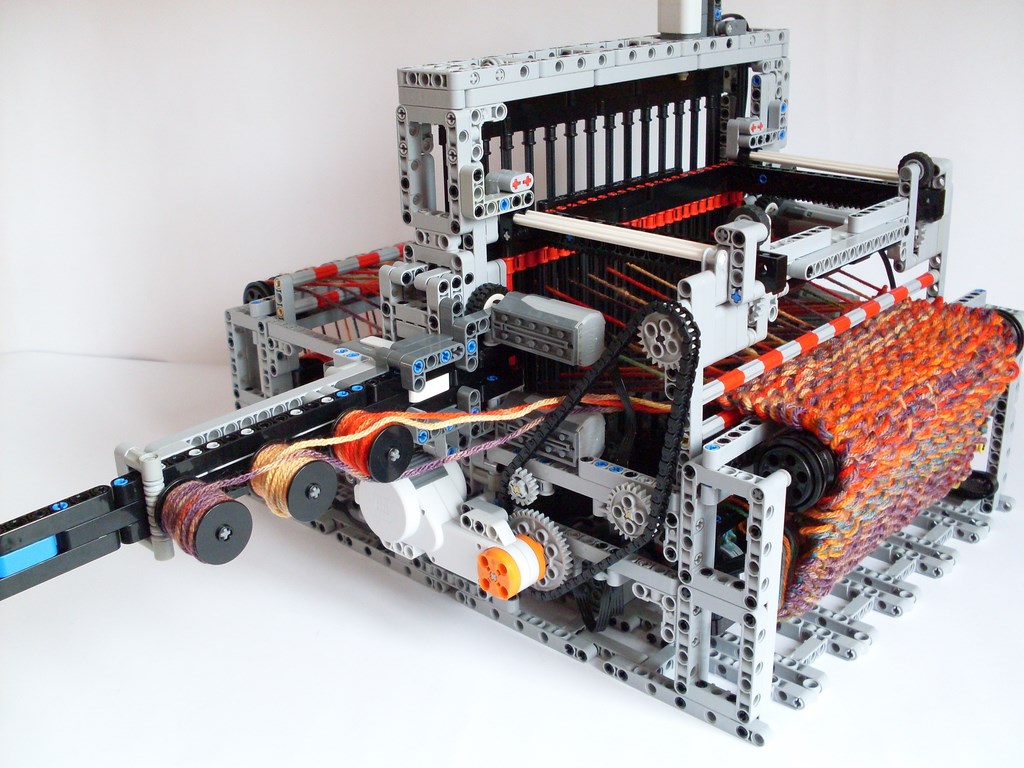
Czarna przelotka z 3 zwojami nici musi się przedostać na drugą stronę tkaniny. Cały element jest przesuwany przez 4 silniki PF medium (po 2 na stronę). Silniki są podłączone do wieży IR PF, która jest sterowana przez kostkę NXT dzięki czujnikowi HiTechnic IRLink.
W tym etapie biorą też udział 2 czujniki koloru rozpoznające pozycję przelotki dzięki wbudowanym w nią 2 liftarmą w kolorze białym oraz niebieskim.
Ad. 2
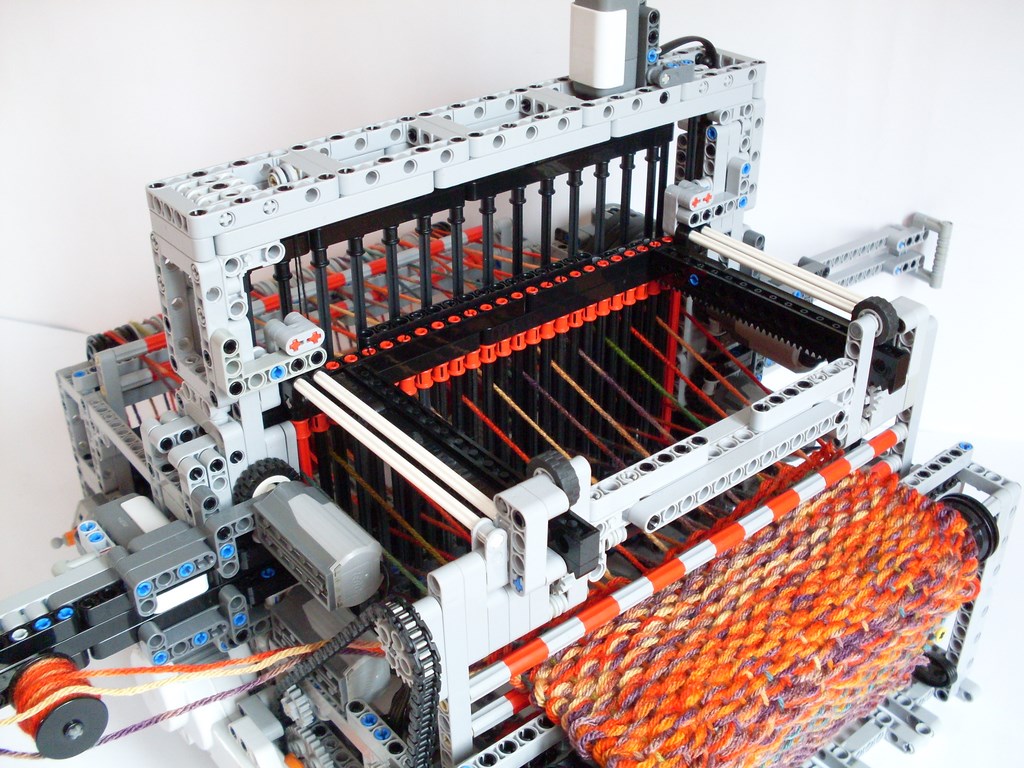
Za docisk nowego rzędu nici odpowiada grzebień zbudowany z 26 axli zamontowanych na pinach z bushem. Grzebień przesuwa się po białych axlach 16 dzięki dwom listwą zębatym. Cały mechanizm napędzany jest za pośrednictwem łańcucha przez serwomotor NXT. Dzięki enkoderowi znana jest aktualna pozycja grzebienia.
Ad. 3
Żeby zablokować nowy rząd nici należy go zapleść po przez skrzyżowanie nici wzdłużnych.
Każda z 27 nici wzdłużnych przewinięta jest przez tzw. nicielnicę – w mojej konstrukcji elementy te stanową axle and pin connectory angeled #2 tworzące dwie kratownice. Każda kratownica zamontowana jest do listwy zębatej 13. Listwy te są napędzane wspólną zębatką dzięki silnikowi XL. Za rozpoznanie pozycji kratownic odpowiada czujnik dotyku zamontowany na samej górze konstrukcji.
Ad.4
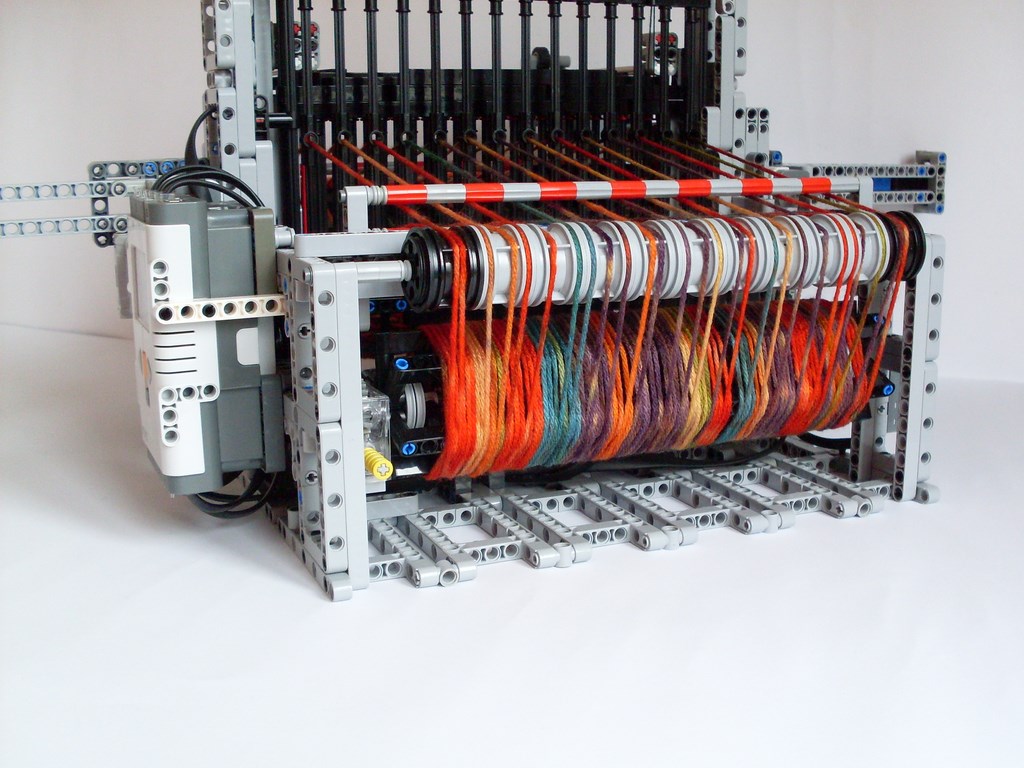
Konstrukcja posiada dwa duże zwoje: do nawijania powstałej tkaniny oraz magazynujący nicie wzdłużne. Zwoje te są ze sobą połączone za pośrednictwem wału, który jest napędzany przez serwomotor NXT. Wraz z każdym nowopowstałym rzędem nici zwoje przesuwają się. Dzięki możliwości regulowania kąta nawinięcia możemy otrzymywać tkaninę o różnej gęstości nici poprzecznych.
OPIS OPROGRAMOWANIA (nieobowiązkowe dla castlowców)
Program sterownika NXT napisałem w RobotC. Łącznie 377 linii kodu.
Menu programu składa się z kilku zakładek:
1. POMOC - krótki opis obsługi maszyny.
2. INICJALIZACJA - kalibracja wszystkich elementów maszyny tj. automatyczne ustawienie przelotki, docisku i kratownic w odpowiedniej pozycji.
3. TKANIE - proces produkcji tkaniny. Po wejściu do tego menu mamy możliwość ustawienia rozmiaru/odległości pomiędzy kolejnymi rzędami nici poprzecznej, co ma wpływ na gęstość powstającej tkaniny. Zaprogramowych jest 6 rozmiarów. Po zatwierdzeniu maszyna rozpoczyna tkanie. Uwaga – jeśli nie wykonano wcześniej inicjalizacji to maszyny uruchomi ją automatycznie przed rozpoczęciem tkania.
W trakcie tkania na ekranie menu wyświetlana jest ilość przewiniętych rzędów nici w tym cyklu.
4. NAWIJANIE - możliwość manualnego przewijania zwojów z tkaniną za pomocą strzałek klawiatury NXT.
5. BATERIA - sprawdzanie poziomu naładowania baterii.
6. WYJŚCIE - wyłączenie programu.
PODSUMOWANIE
Szalik ma 160cm długości. Powstał z ok. 240 metrów nici. Teoretyczny czas wykonania wynosi 27 minut. Tkanina nie jest jednolicie gęsta, gdyż jest to efekt wszystkich testów maszyny.



GALERIA
http://www.brickshelf.com/gallery/TT/NXT/LoomMachine/
VIDEO
[youtube]http://www.youtube.com/watch?v=IPIJsdvDjsc[/youtube]