(Wszystkie zdjęcia są linkami do większych wersji)

[URL=http://www.00453005_0000002.pl/forum/viewtopic.php?t=17734] [/URL]
[/URL]
[/URL]
Może nie widać tego od razu, ale większość została całkowicie przebudowana.
Podstawowe zmiany w porównaniu do poprzedniej wersji:
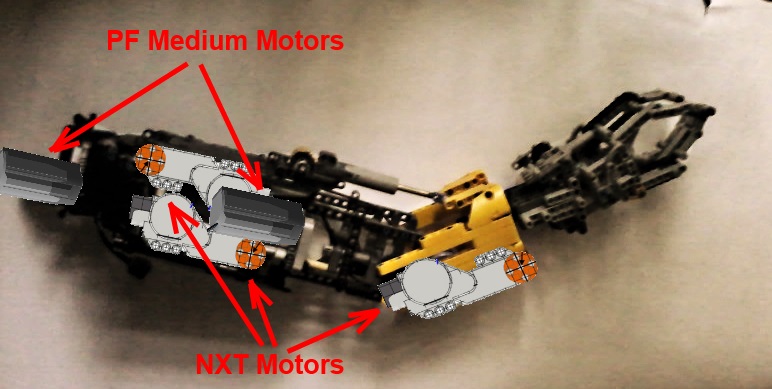
- zamiast demultipleksera - dwie kostki NXT (demultiplekser działał, ale za dużo mocy traciłem na wyjściu)
- zaprojektowana i zbudowana całkiem od nowa obrotnica (poprzednia działała słabo)
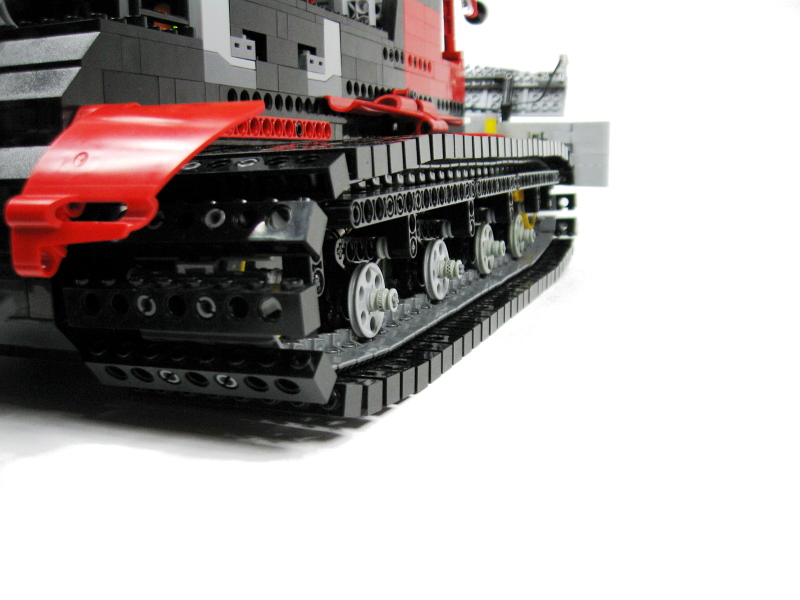
- przebudowane gąsienice (żeby kształt bardziej odpowiadał oryginałowi)
- przebudowane ramiona (żeby zwiększyć funkcjonalność)
- dociągnięty napęd do poruszania powiekami
Co zostało bez zmian:
- kształt głowy
- dłoń prawa
- dłoń lewa (chociaż zbudowana od nowa na szybko w Rzeszowie)
No to po kolei :-)
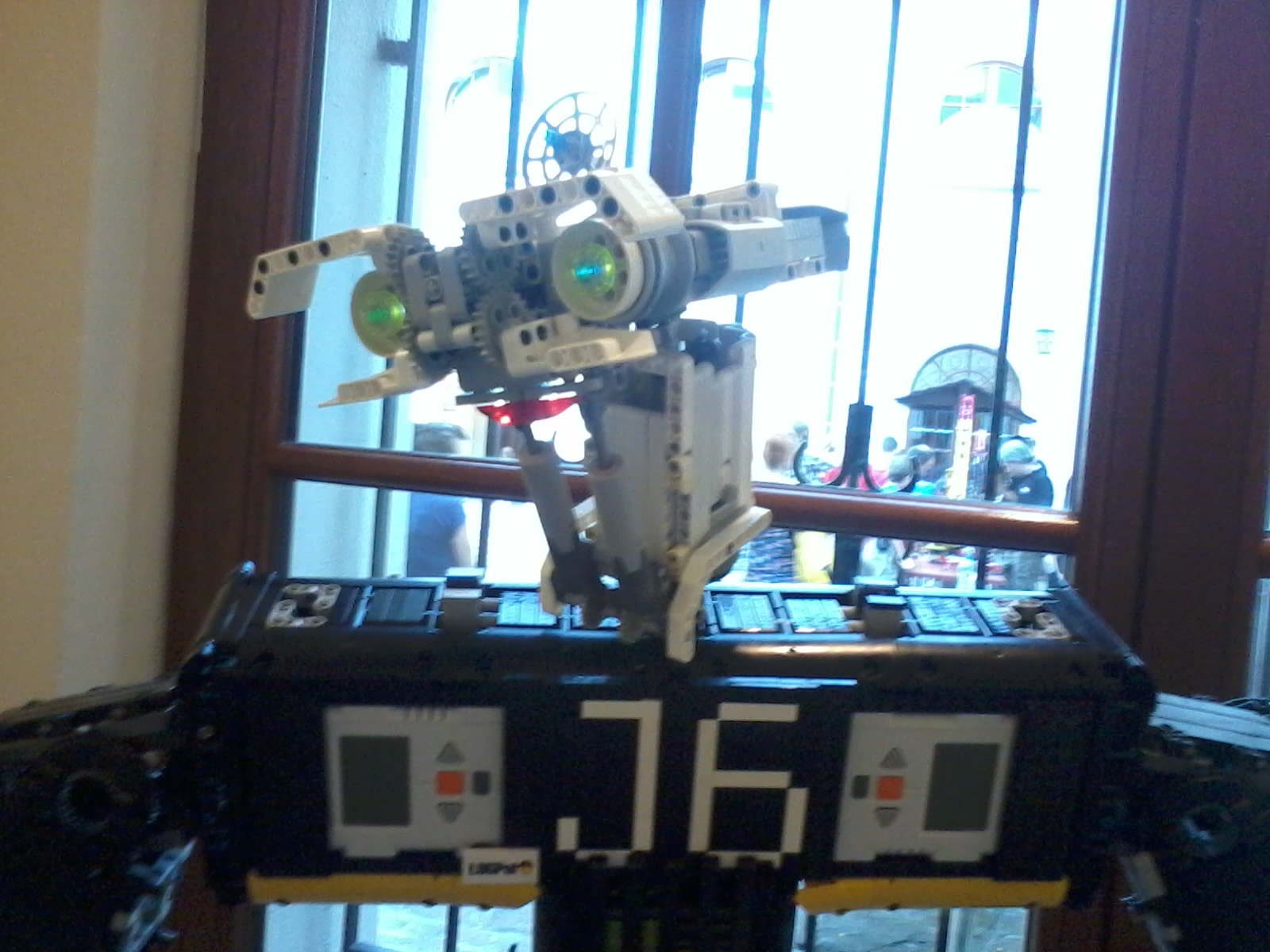
Głowa:
- - podłączone zamykanie/otwieranie oczu/powiek
- przygotowane, nie podłączone kręcenie głową
- przygotowane, nie podłączone skrzywianie głowy
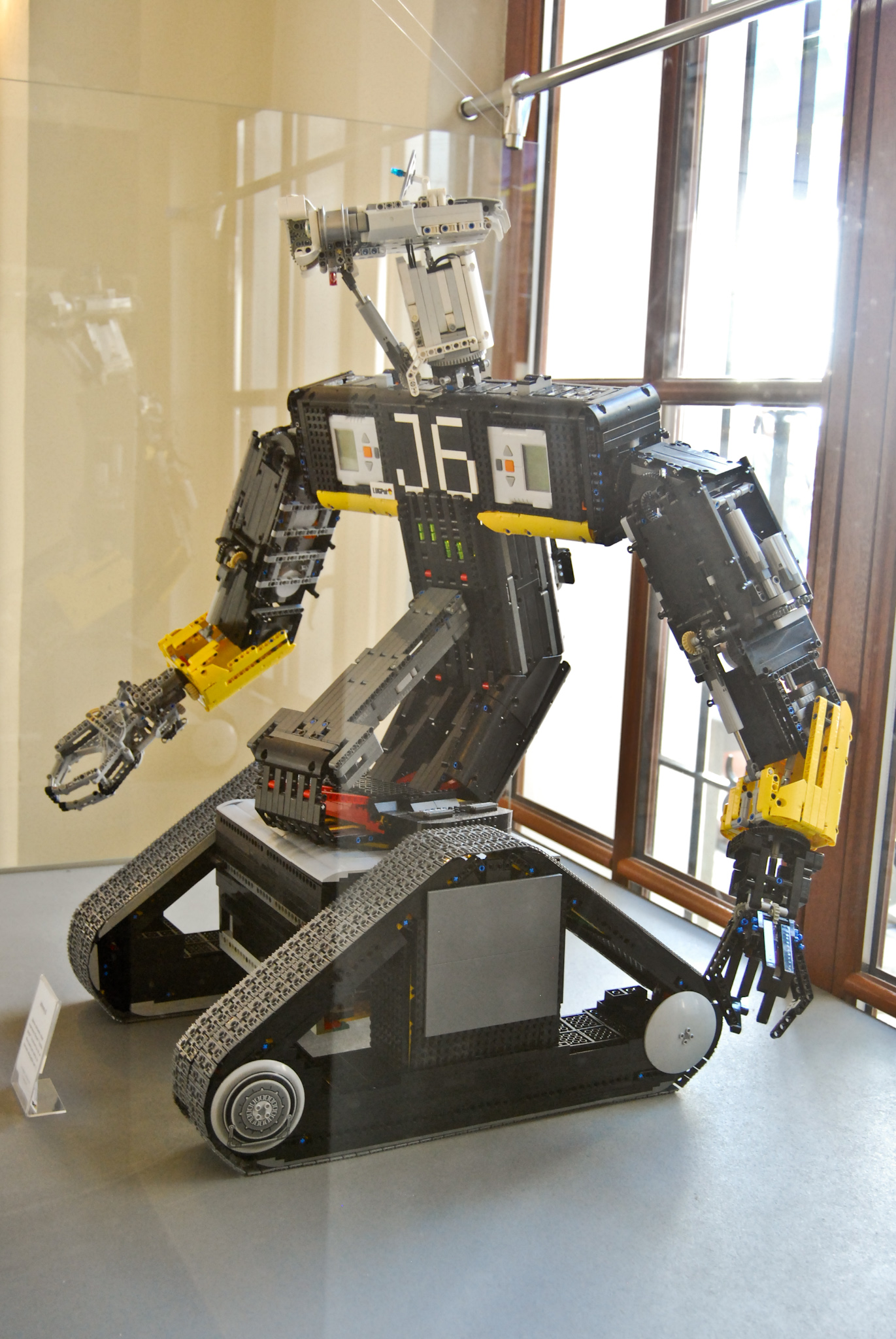
Tułów:
- - tym razem bez schylania, chociaż był wyciągnięty i przygotowany napęd
- przebudowany całkowicie na TechnicBricki zamiast liftarmów które były poprzednio a przy ciężarze całości w niektórych miejscach się wyginały


- - nowa obrotnica - skręcanie tułowiem

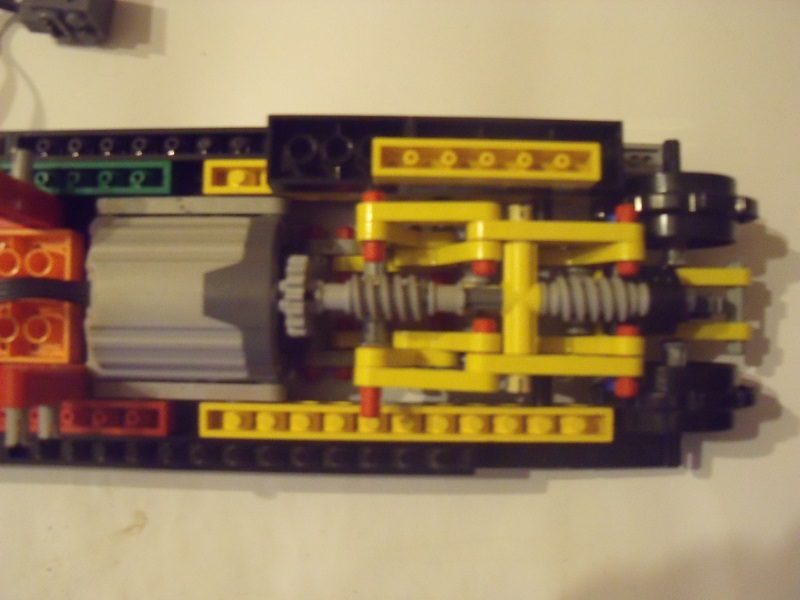
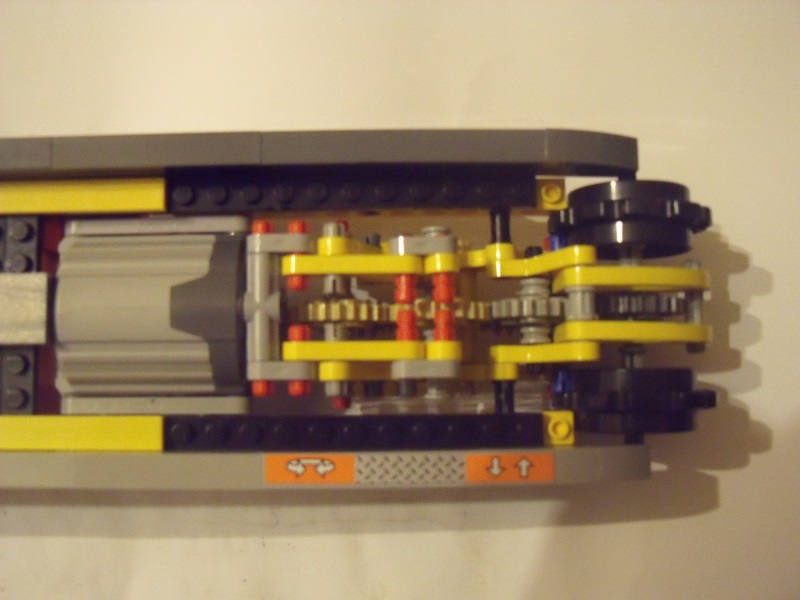
Gąsienice:
- - napędzane dwoma silnikami XL, zawsze jeden pcha, drugi ciągnie obydwie gąsienice po jednej stronie
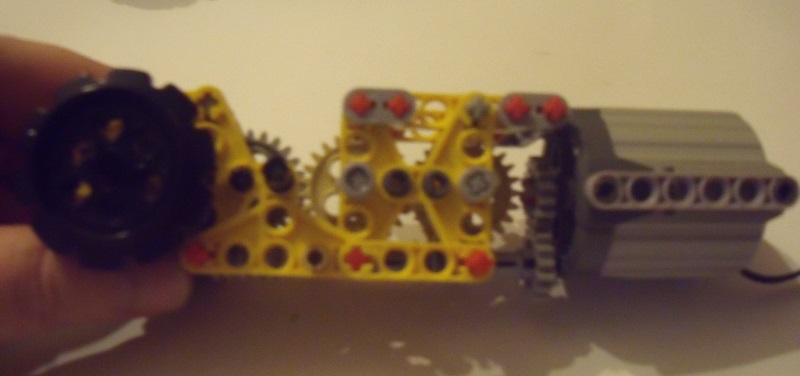

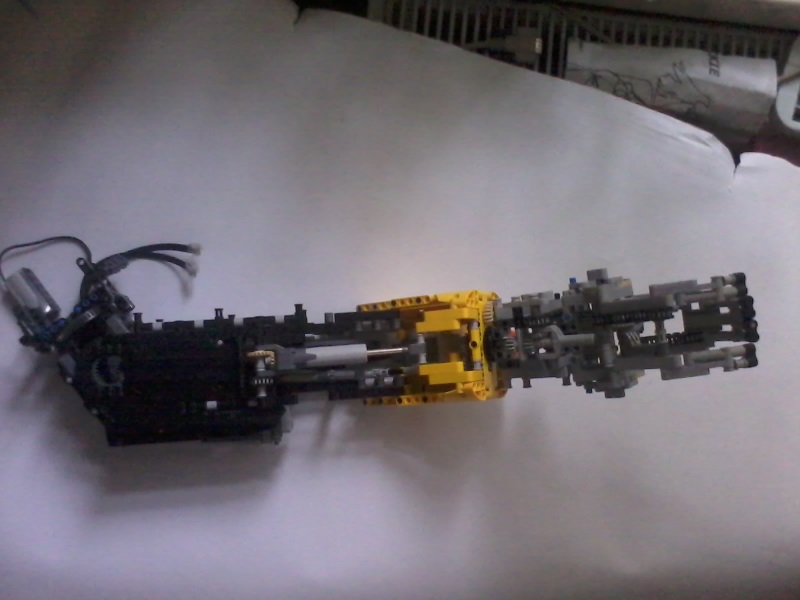
Ramiona:
- - podpatrzone u Piotrka podnoszenie ramion w bok - siłownik śrubowy kręcący ramieniem na obrotnicach
(one robią tylko za wzmocnienie)
- kręcenie ramieniem w barku - wymaga dalszego wzmocnienia, mam pomysł na użycie równolegle dwóch dużych obrotnic
- łokieć - banalne, siłownik śrubowy załatwia wszystko
- nie podłączone kręcenie nadgarstkiem - mała obrotnica
- nie podłączone wyginanie nadgarstka w pionie - dwa małe siłowniki śrubowe, da się zrobić na czterech siłownikach wyginanie nadgarstka w dowolnej płaszczyźnie
- zaciskanie palców - znowu dwa małe siłowniki śrubowe + łańcuchy, które powodują "zwijanie się" palców a nie tylko proste składanie/zaciskanie
- druga ręka taka sama jak w Krakowie - czyli 4 palce właśnie zaciskające się "prosto"
Pilot:
- 4 piloty IR
1 kostka NXT z 3 silnikami sterująca silnikami w lewej lub prawej kostce NXT w modelu.
- 1 wieża:
- lewa gąsienica
- obrót tułowia
2 wieża:
- prawa gąsienica
- gotowe do podnoszenia tułowia
3 wieża:
- obracanie prawym barkiem
- podnoszenie w bok prawego ramienia w barku
4 wieża:
- obracanie lewym barkiem
- podnoszenie w bok lewego ramienia w barku
1 NXT:
- lewy łokieć
- lewe palce
- zamykanie oczu
2 NXT:
- prawy łokieć
- prawe palce
- miał być prawy nadgarstek
Co w następnej wersji:
- - wzmocnić obracanie w barku
- użyć EV3 z 4 silnikami do prawej ręki (łokieć, palce, nadgarstek skręcanie, nadgarstek wyginanie)
- użyć NXT do lewej ręki (łokieć, palce, nadgarstek)
- użyć switchy do wyboru czy sterować głową czy rękami przy pomocy 2 wież IR i 6 switchyPF
- lewy bark / - zamykanie oczu
- lewy bark / - prawy bark
- prawy bark / - skręcanie głową
- sterowanie switchami
- następnym razem pojedynczy silnik będzie napędzał pojedynczą gąsienicę, bo ruszają się nie równo co powoduje regularne blokowanie nawzajem
- przywrócić schylanie się :-)
- pierwsze czujniki z NXT :-)
- zabudować kostki NXT tak, żeby mieć do nich większy dostęp :-)
- wzmocnić obrotnicę (tułów), bo podczas transportu jeden z klocków z obudowy wpadł do środka i dlatego się słabo kręciła, a żeby się do niej dostać, trzeba rozebrać prawie cały model :-(
Filmu nie ma i nie będzie. Ci co byli w Rzeszowie mogli usłyszeć, że dokładnie przed wgraniem programu do kostek NXT mój komputer zastrajkował i przestał z kostkami rozmawiać.
A niestety dostęp do podłączenia kabelka wymagałby rozłożenia ramion, a podłączanie ich zajmowało mi zazwyczaj około pół godziny :-)
W dodatku zirytowało mnie to maksymalnie, bo jeszcze chwilę wcześniej testowałem działanie ramion sterując nimi ręcznie z komputera i działały!
W związku z czym na otwarciu Johnny ruszał tylko trochę rękami (to co szło z wież IR) - zazwyczaj reagował na sterowanie Terminatorem przez Piotrka :-).
Potem przestała działać również obrotnica (jak go rozebrałem już w domu - okazało się, że jeden tile 1x4 z obudowy wpadł do niej - dlatego się zablokowała.
Dla odmiany dostęp do obrotnicy wymaga praktycznie rozebrania całego robota.
A jeszcze bardziej dla odmiany w napędzie jednej z gąsienic jedna z zębatek się wysunęła i blokowała ruch - podejrzewam, że podczas transportu, bo od poskładania go w Rzeszowie miałem z nimi problemy.
Większość zmian w porównaniu do poprzedniej wersji była na plus - jedyna zmiana na minus to zdecydowanie gorsze możliwości "szybkiego serwisowania" - z drugiej strony było to spowodowane wzmocnieniami jakie porobiłem, żeby cały robot nie miał problemów ze stabilnością zwłaszcza tułowia i ramion.
Galeria Brickshelf działa, Wip jak się zmoderuje
P.S. Świetnie, że udało się spotkać z Piotrkiem i jego Terminatorem :-)
Przy okazji moim zdaniem wyszło, że mamy jednak odmienne filozofie budowania :-)
Ja staram się mechanizmy ukrywać - Piotrek na odwrót :-)
Ja buduję w docelowej skali 1:1 lub 1:1.5 - Piotrka Terminator jest w 1:2 :-) (tak licząc "na oko").
Piotrek pakuje wszystko w jak najmniejszą przestrzeń - ja mam zawsze w miarę sporo luzu jeszcze :-)
P.S.2. Przypomniało mi się - zawaliłem i tym razem go nie zważyłem, ale stawiam, że przekroczyłem 10kg, może nawet 11kg :-) - ale technicbricki dają tutaj radę :-)
P.S.3. I jeszcze- miał być większy, ale w związku z tegorocznym BOPem :-> musiałem go obniżyć - wyszedł napakowany w barach - lepiej niż Arnold :-)
P.S.4. Dzięki Zgrredkowi za pożyczenie talerzy (z tyłu gąsienic), 3domowi za pożyczenie kilku technicowych paneli (bo mi brakło) i Darkowi Mrozowi za pożyczenie NXT na pilota (szkoda, że nic z tego nie wyszło z winy mojej i mojego laptopa).
Jak chcecie to komentujcie, jeśli jeszcze ktoś coś chce dodać a nie powiedział (ponarzekał :-) ) w ciągu ostatnich kilku miesięcy.