
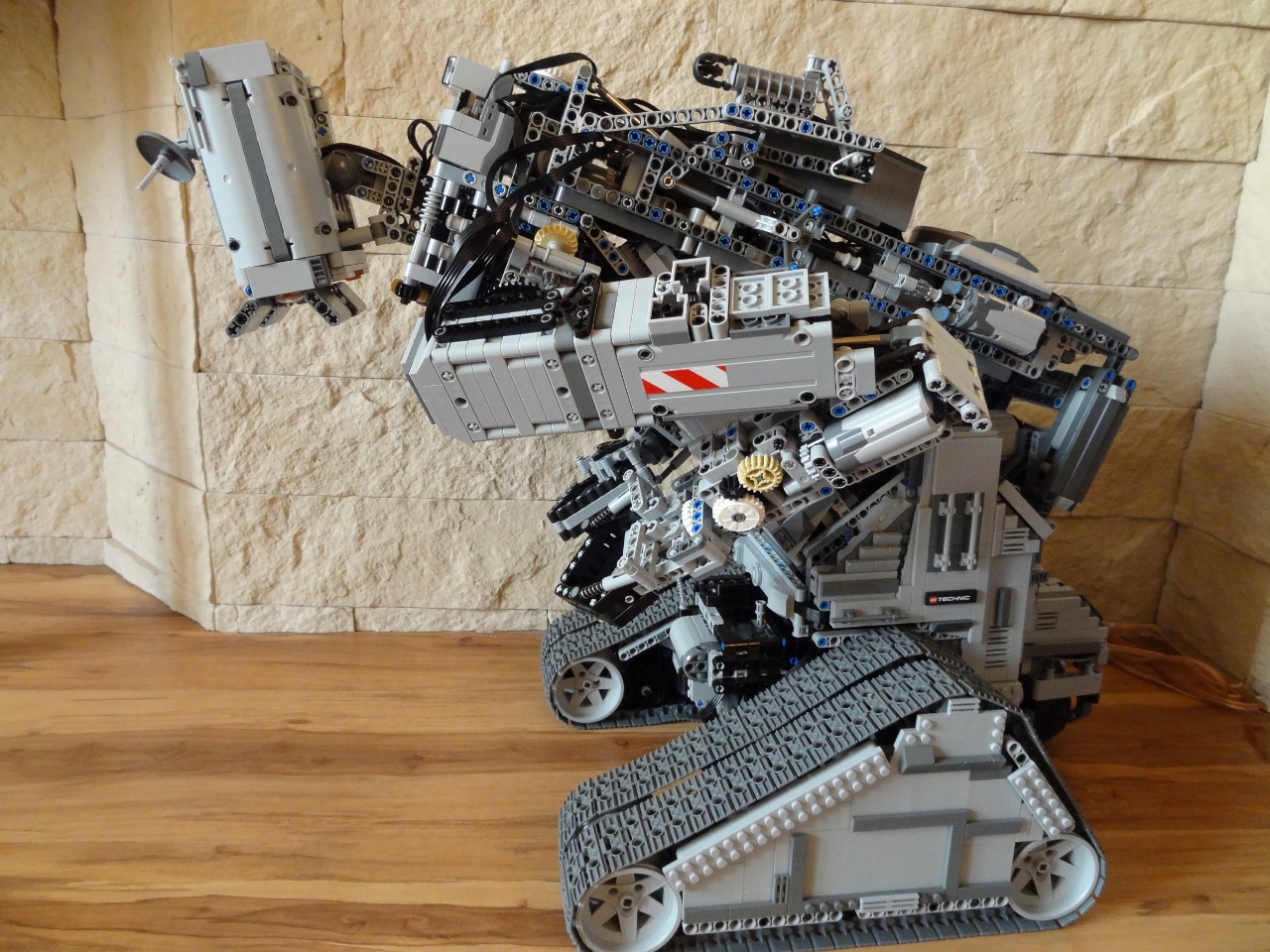
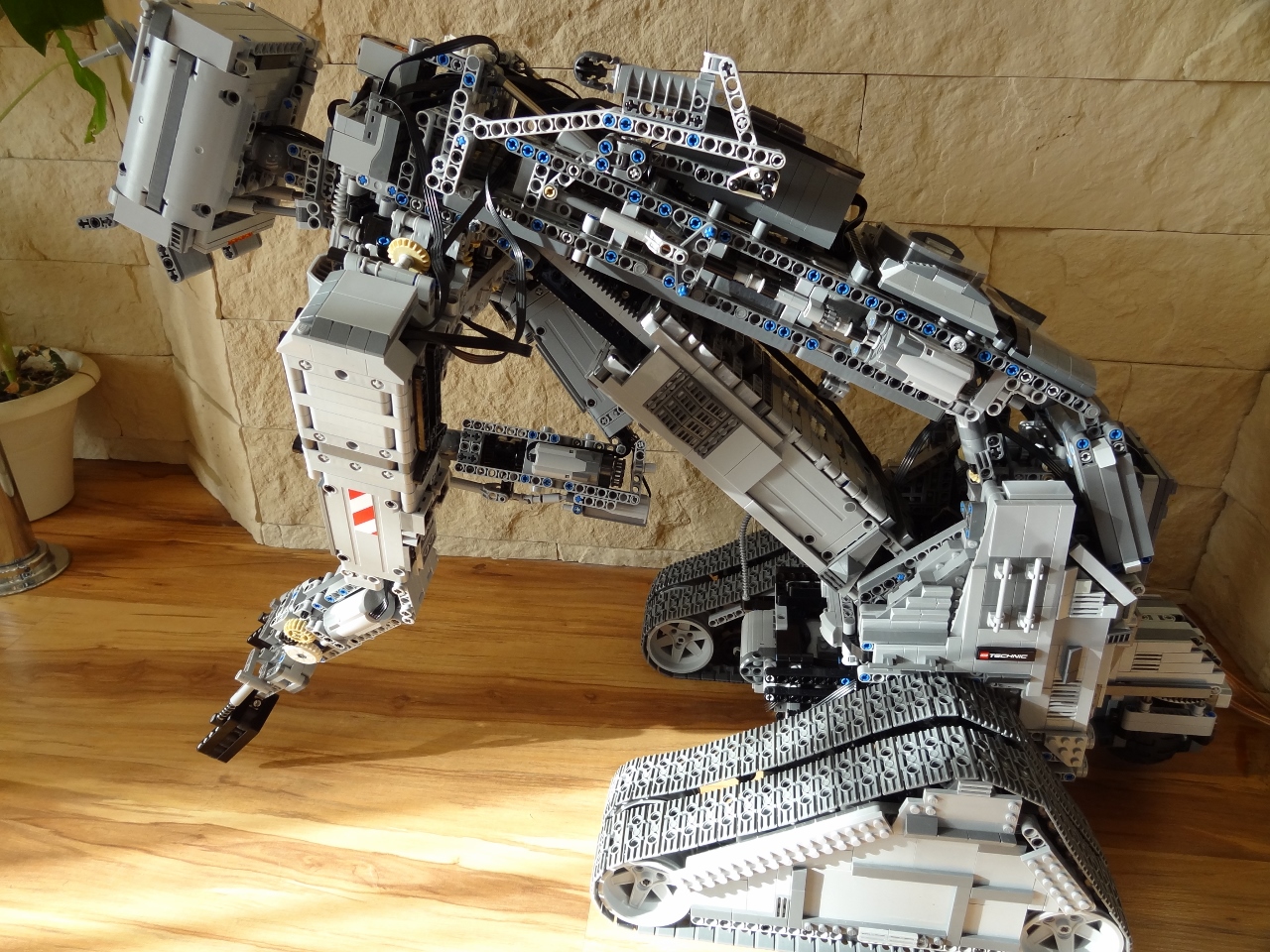
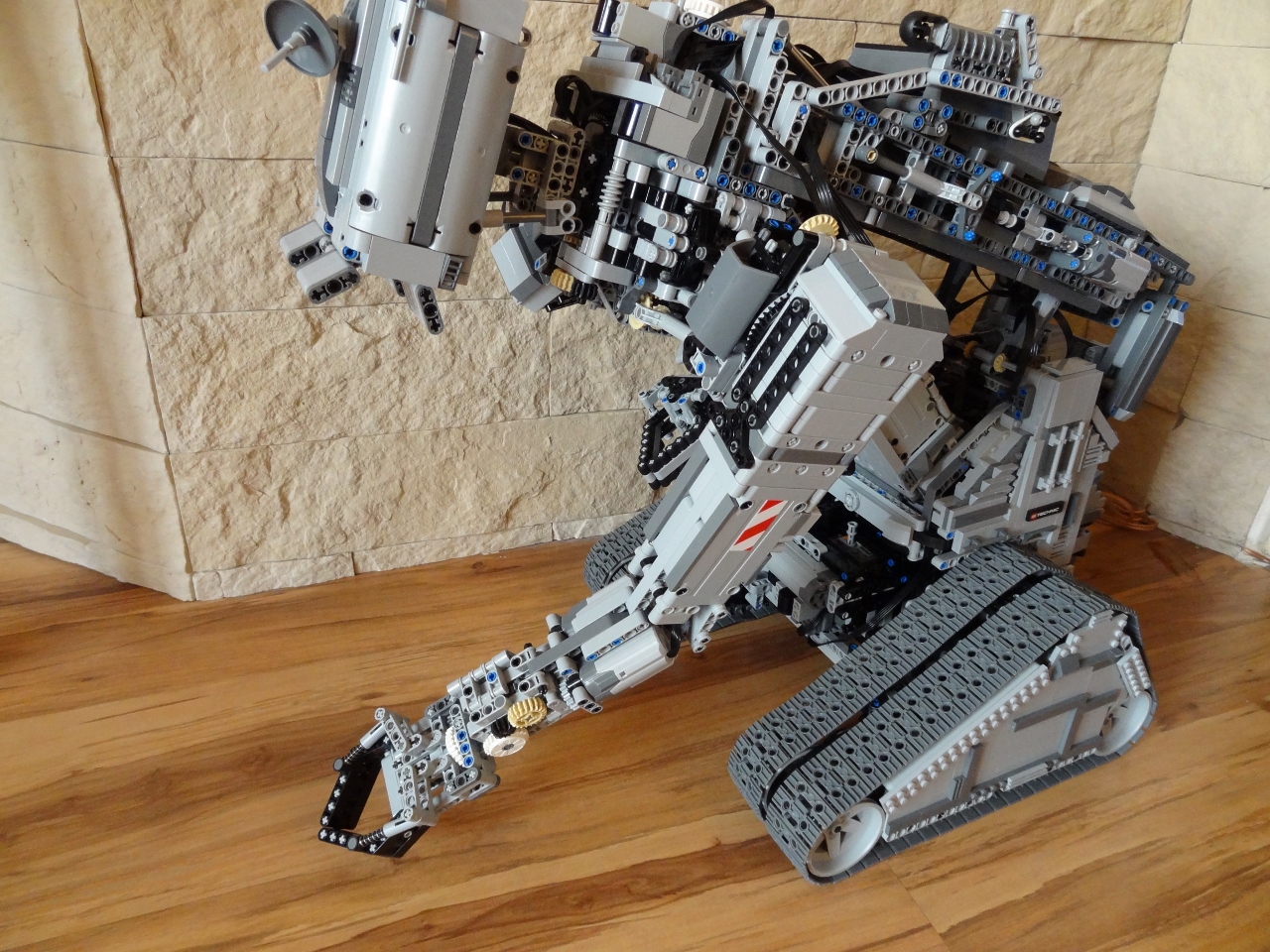
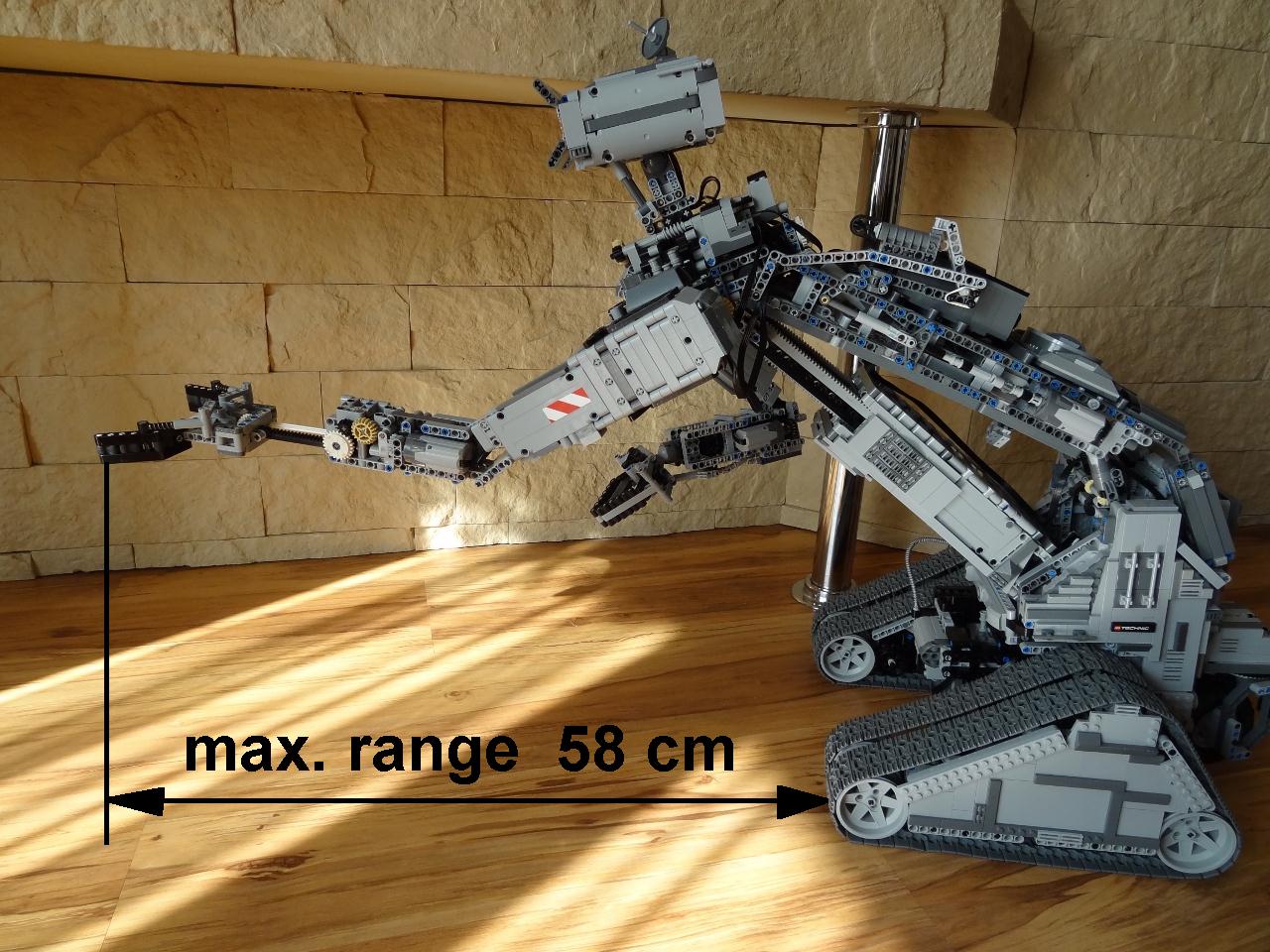
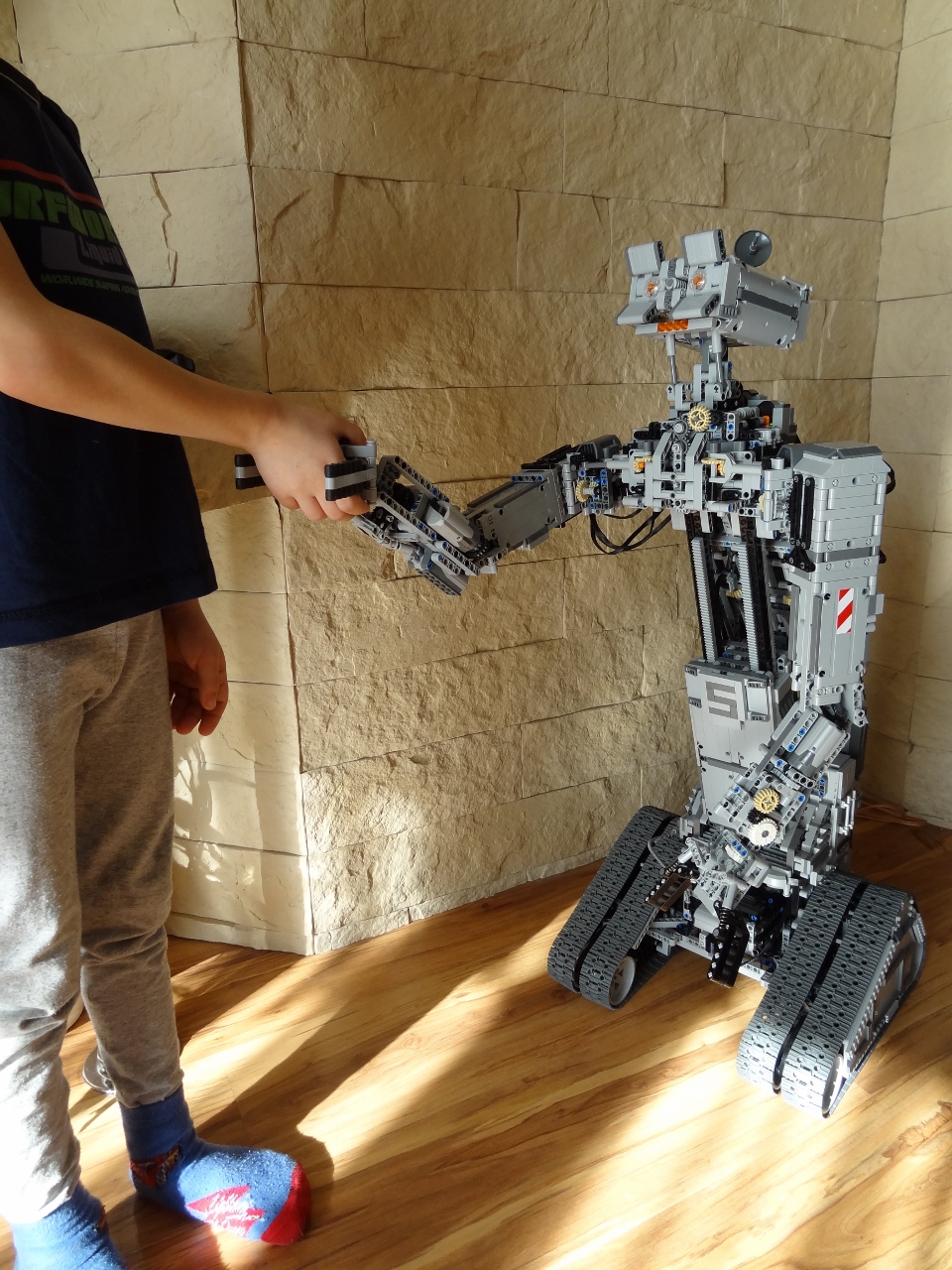
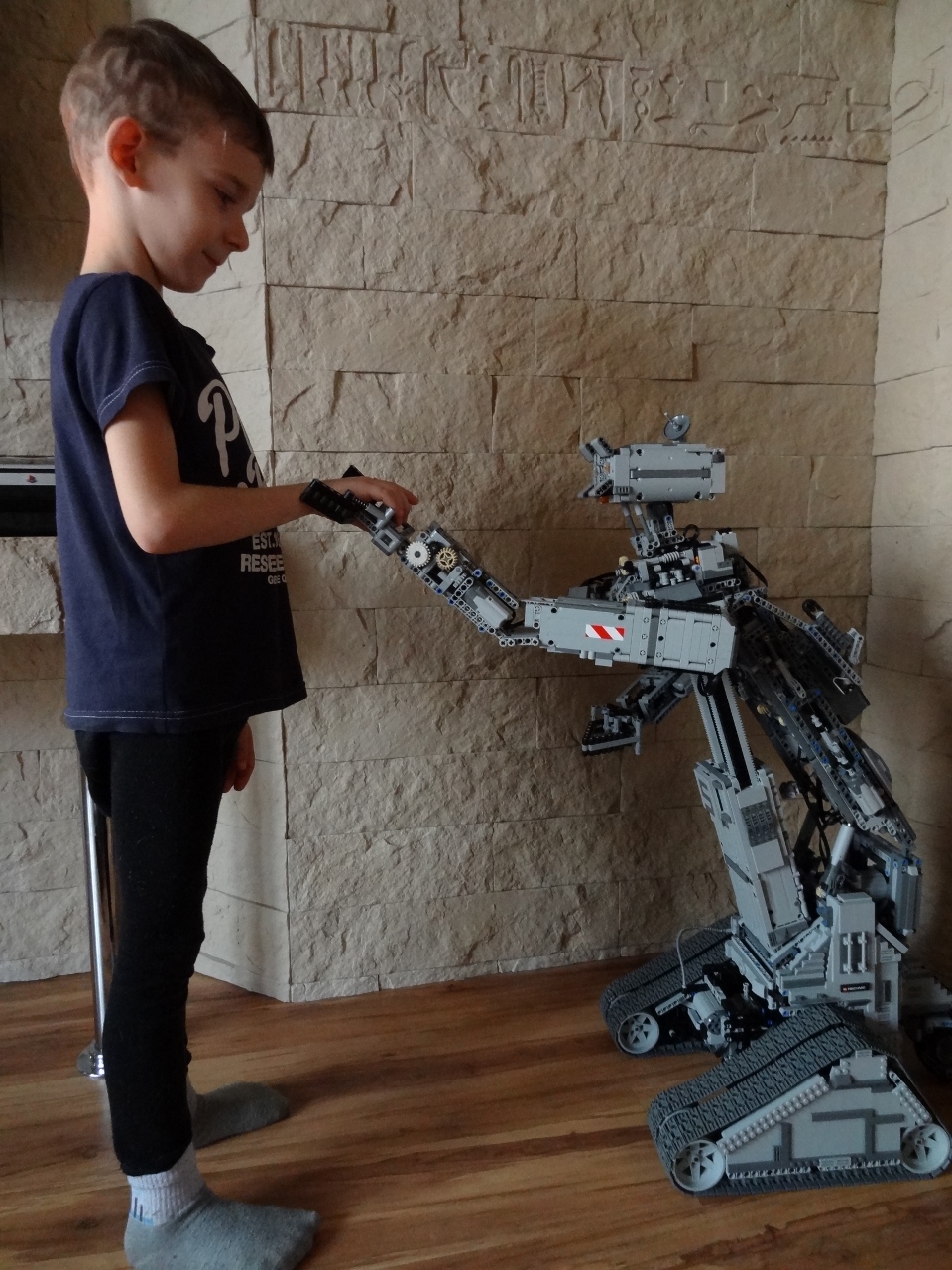
Witam wszystkich. Po dłuższej przerwie w prezentowaniu MOCy przedstawiam mojego nowego robota. Inspiracją do jego budowy był filmowy Johny 5 z filmów "Krótkie spięcie 1 i 2".
W internecie można znaleźć wiele robotów o tej tematyce więc ja chcąc jakoś wyróżnić swojego postawiłem na funkcje których jest łącznie 24, oraz na nieprzeciętne możliwości ruchowe. Dodam że wszystkie funkcje są w 100% obsługiwane z pilotów.
Specyfikacja techniczna
20 silników PF z czego:
12 silników M
6 silników XL
1 silnik L
1 serwo
10 wież IR
4 duże baterie
9 przedłużek 50cm
2 przełączniki (jako przedłużki)
1 światła
Wymiary
Waga – 7,4 kg
Wysokość w przysiadzie – 65 cm
Wysokość po podniesieniu – 80 cm
Minimalna wysokość (po pochyleniu) – 46 cm
Szerokość – od 33 cm na gąsienicach do 49 cm w łokciach przy rozchyleniu
Długość – 42 cm (w przysiadzie w pozycji wyprostowanej)
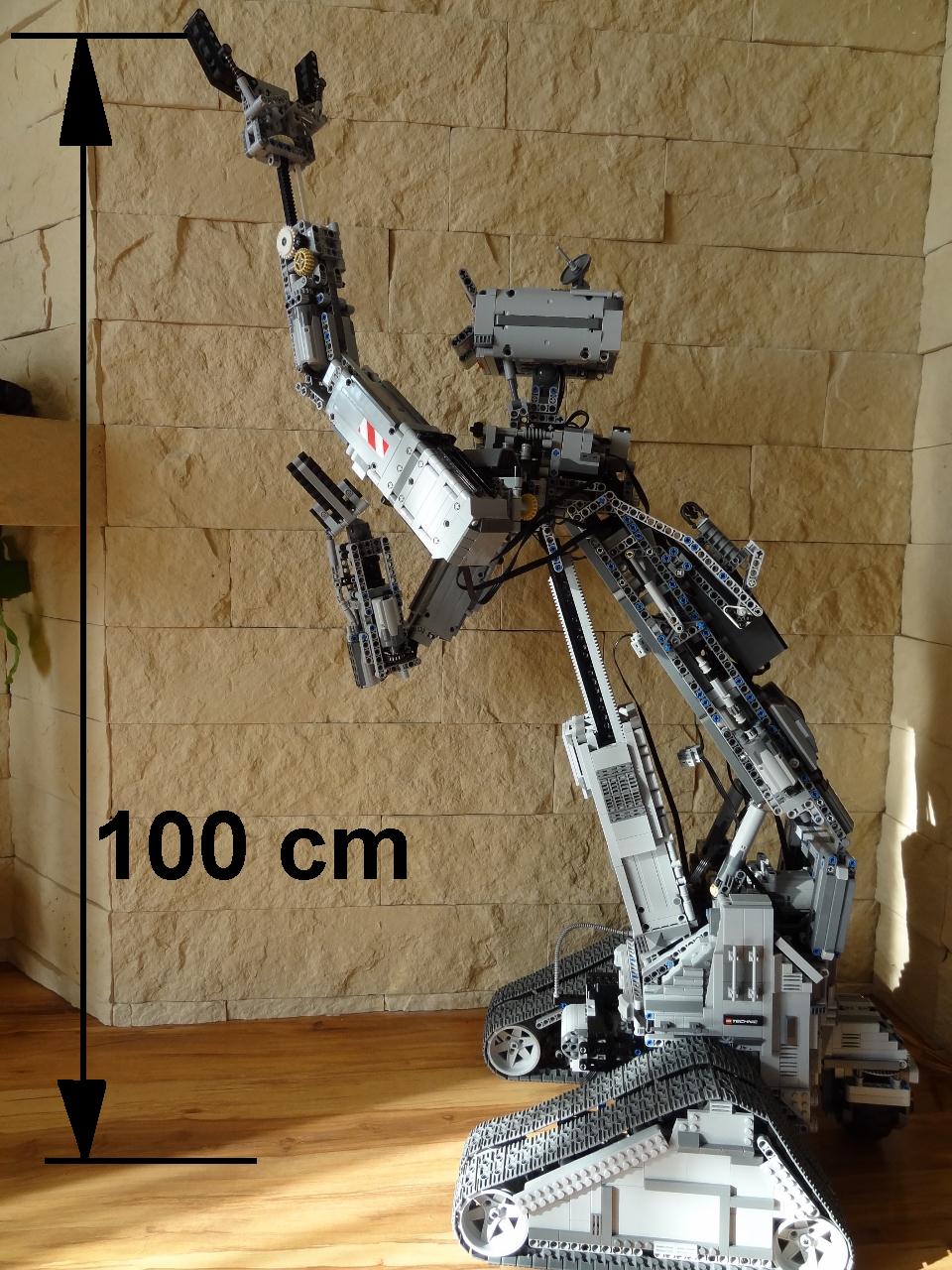
Zasięg ręki dół-góra – od -10cm do 100cm
Max. zasięg ręki do przodu liczony od gąsienic – 58 cm




Zapraszam na szczegółowy opis działania
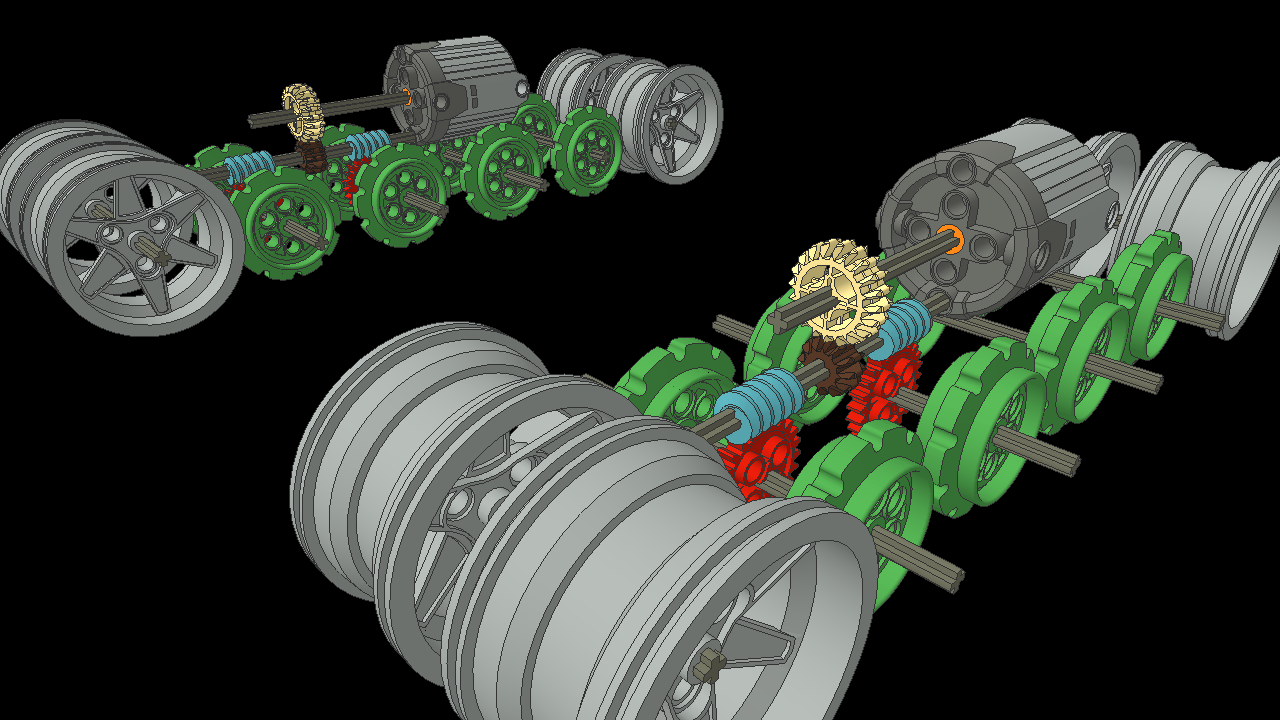
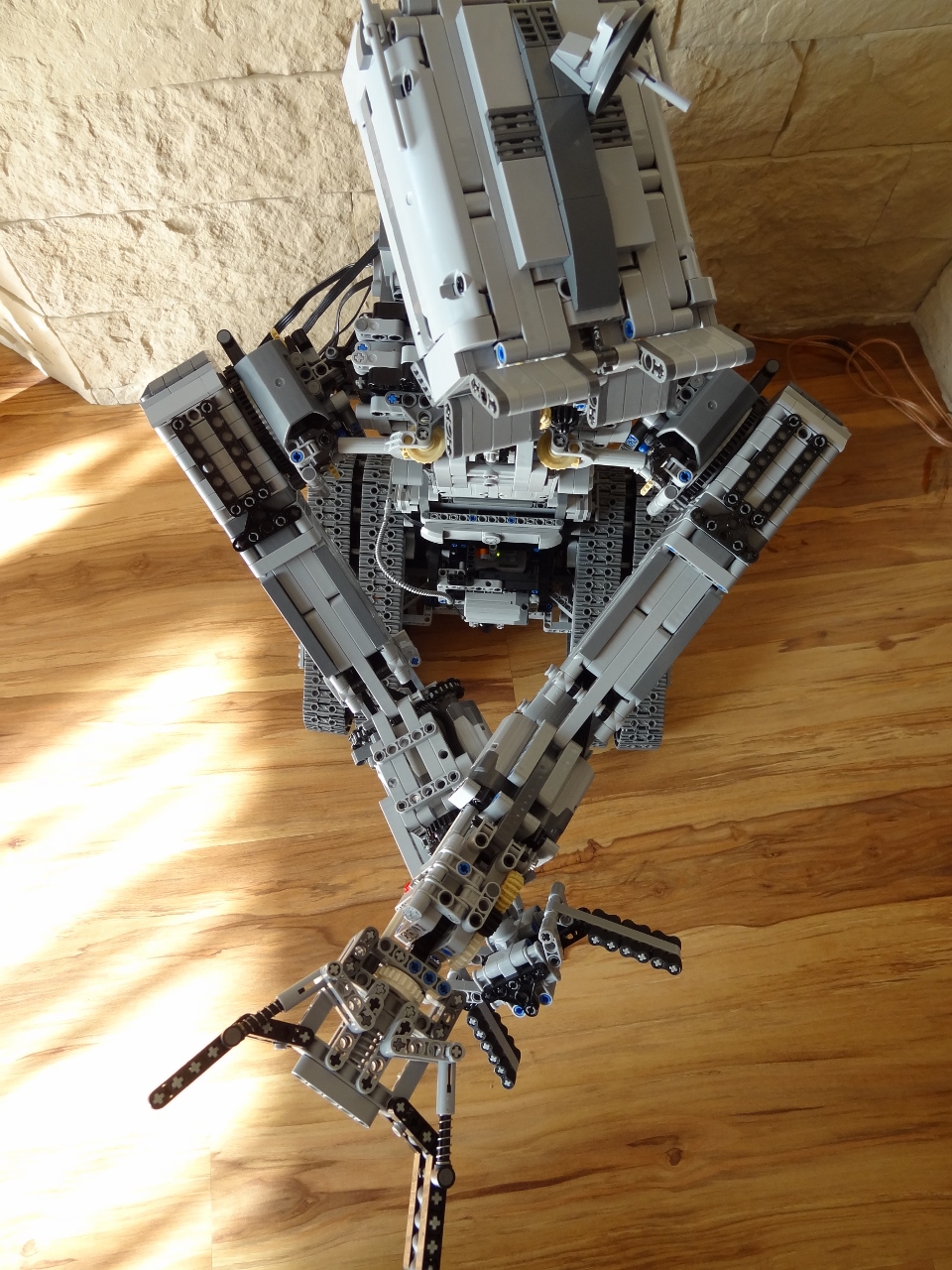
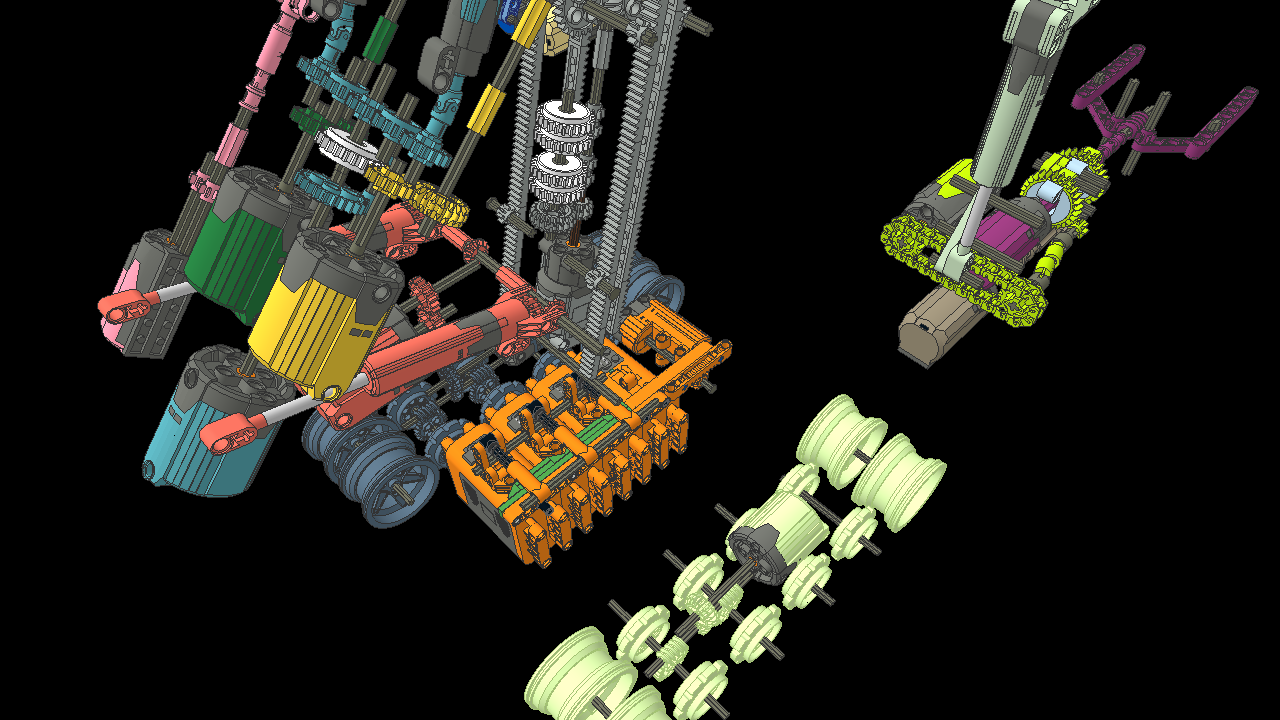
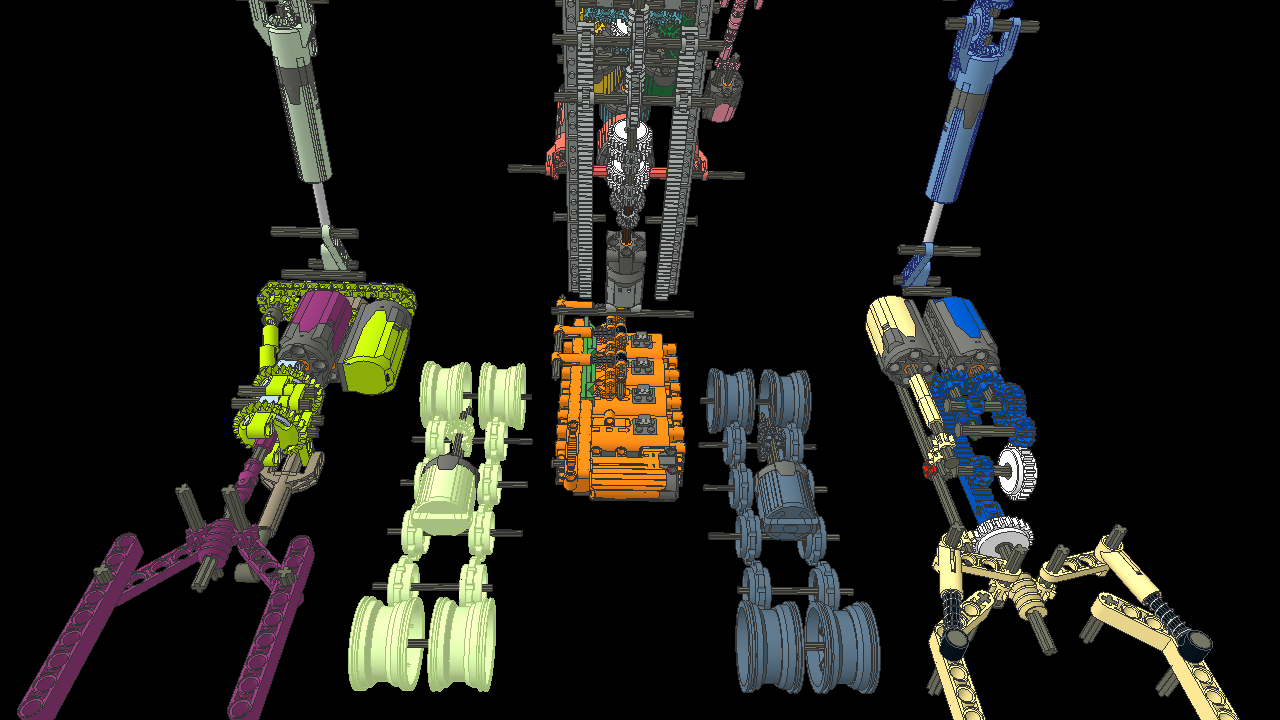
Mobilność
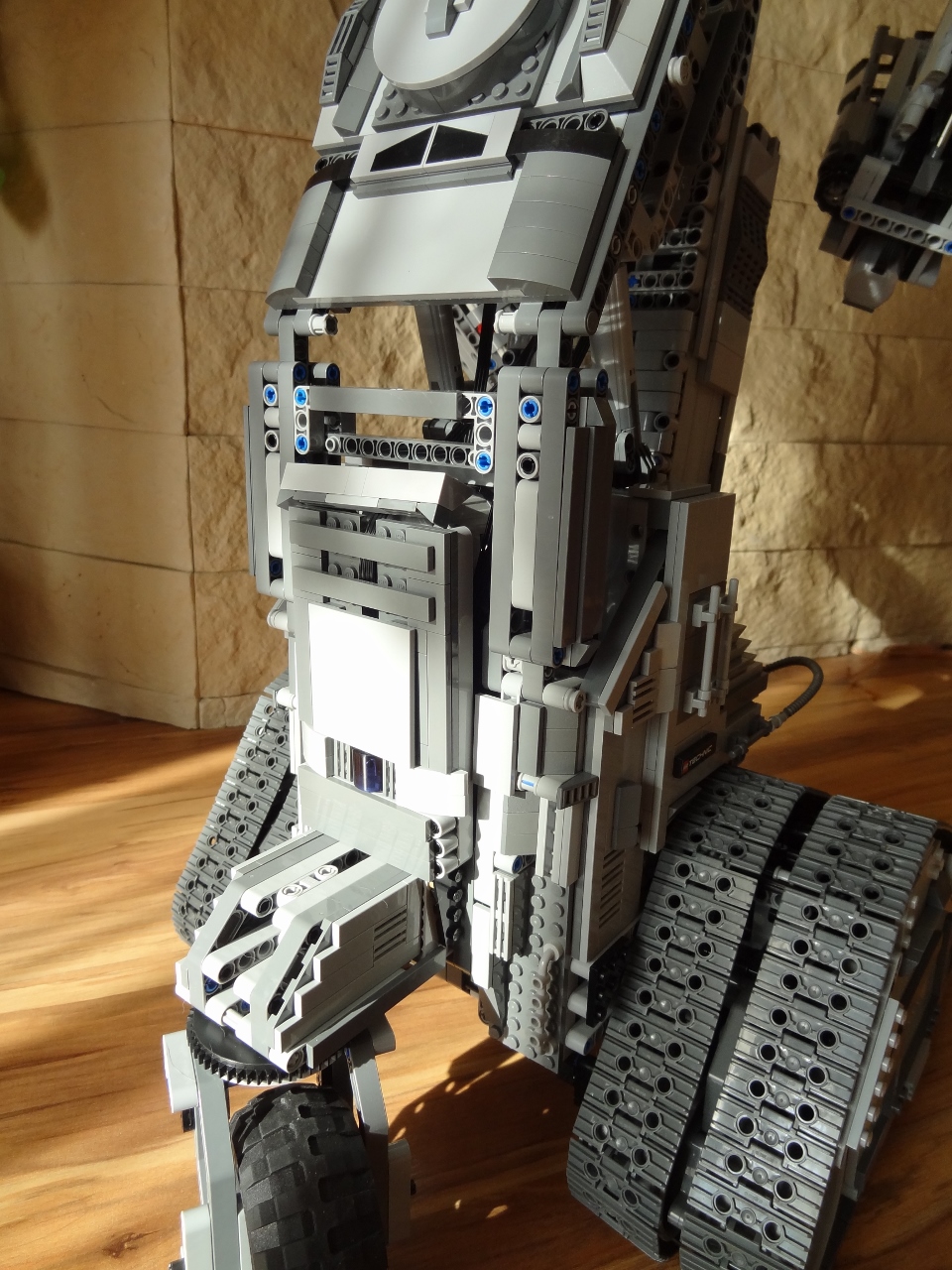
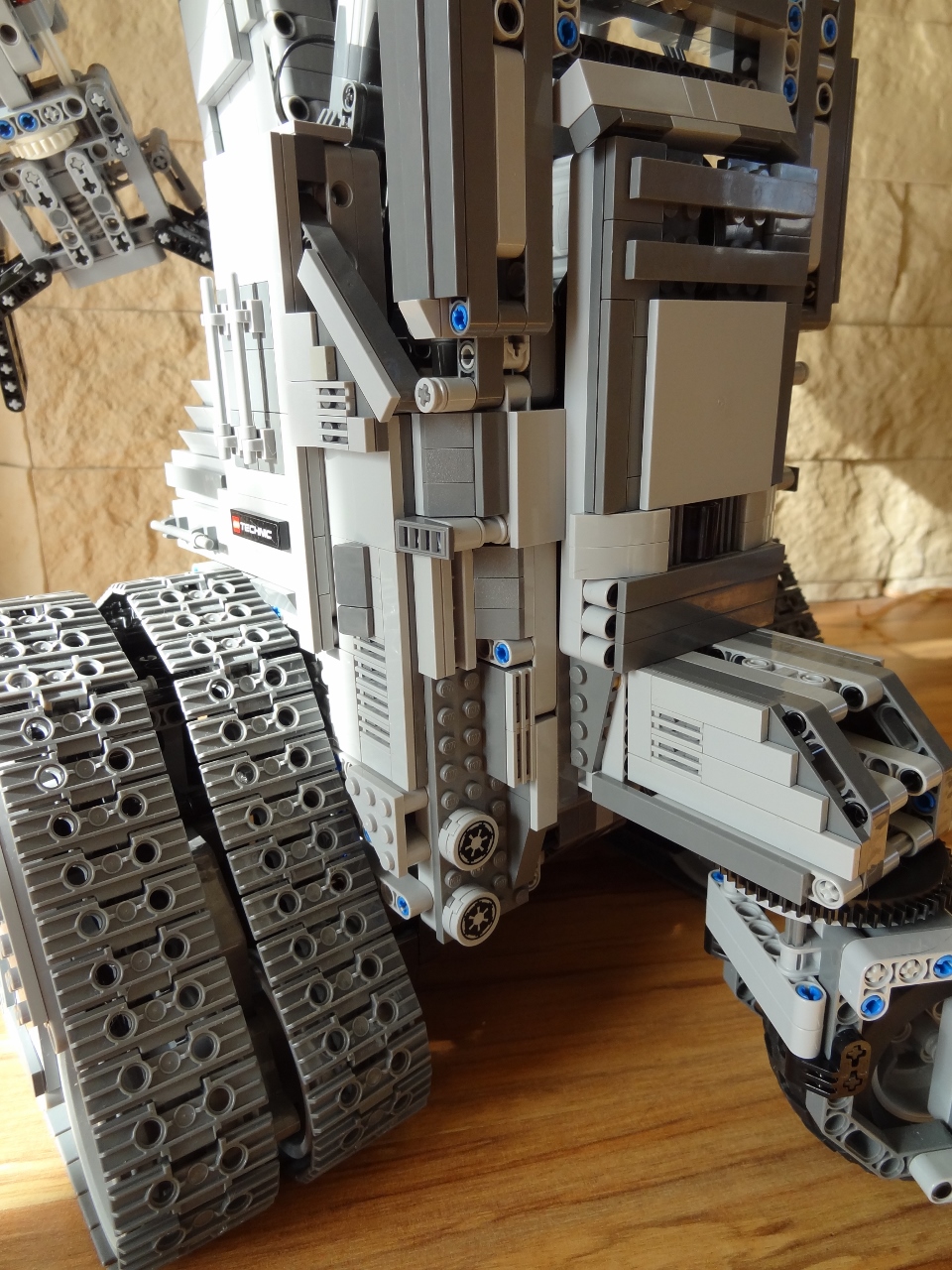
Robot porusza się na 4 rzędach gąsienic po 60 ogniw każda. Są to wszystkie jakie posiadam więc od nich wszystko się zaczęło. Na ich podstawie zaplanowałem proporcje oraz funkcje robota. Do napędu gąsienic służą 2 silniki XL, po jednym na parę. Silniki nie napędzają wszystkich kół ani nawet skrajnych. Patrząc na jedną gąsienicę, napędzane są 2 koła na których spoczywa największy ciężar. W sumie w całym robocie napędzanych jest 8 kół. Zastosowane rozwiązania dały mu ogromny zapas mocy do poruszania dzięki której silniki nie są nadmiernie obciążane.
Konstrukcja nośna
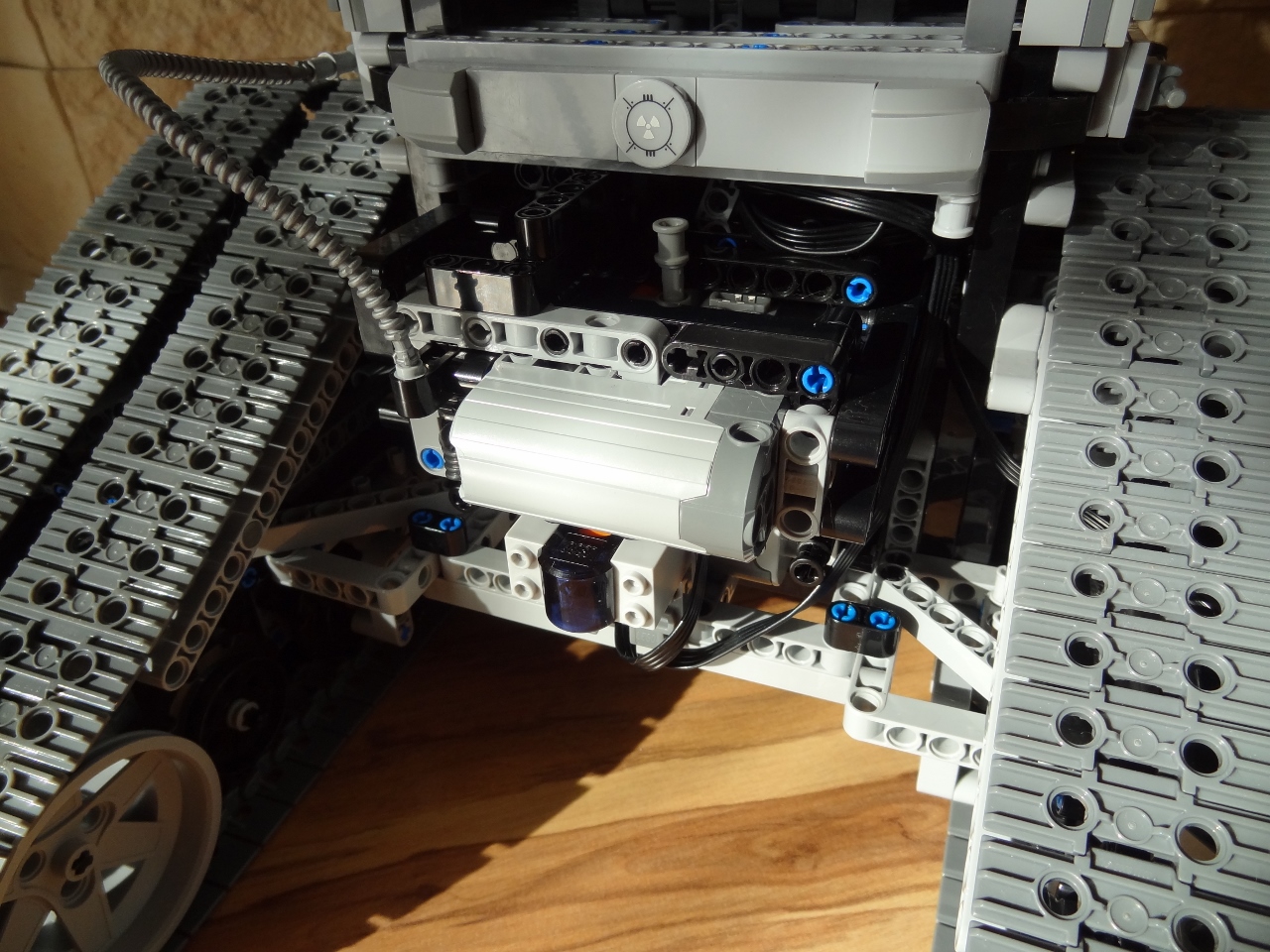
Najistotniejszym elementem do dalszej budowy było opracowanie solidnej konstrukcji która przejmie duże a nawet ekstremalne obciążenia i co najważniejsze, będzie miało w środku bardzo dużą wolną przestrzeń dla systemu zasilania którego nazwałem akumulatorem. Akumulator jest wysuwalnym modułem z dostępem do baterii. Z tyłu znajduje się kółko, takie jakie miał filmowy robot. Obraca się ono swobodnie na takiej samej zasadzie jak te w wózkach sklepowych.
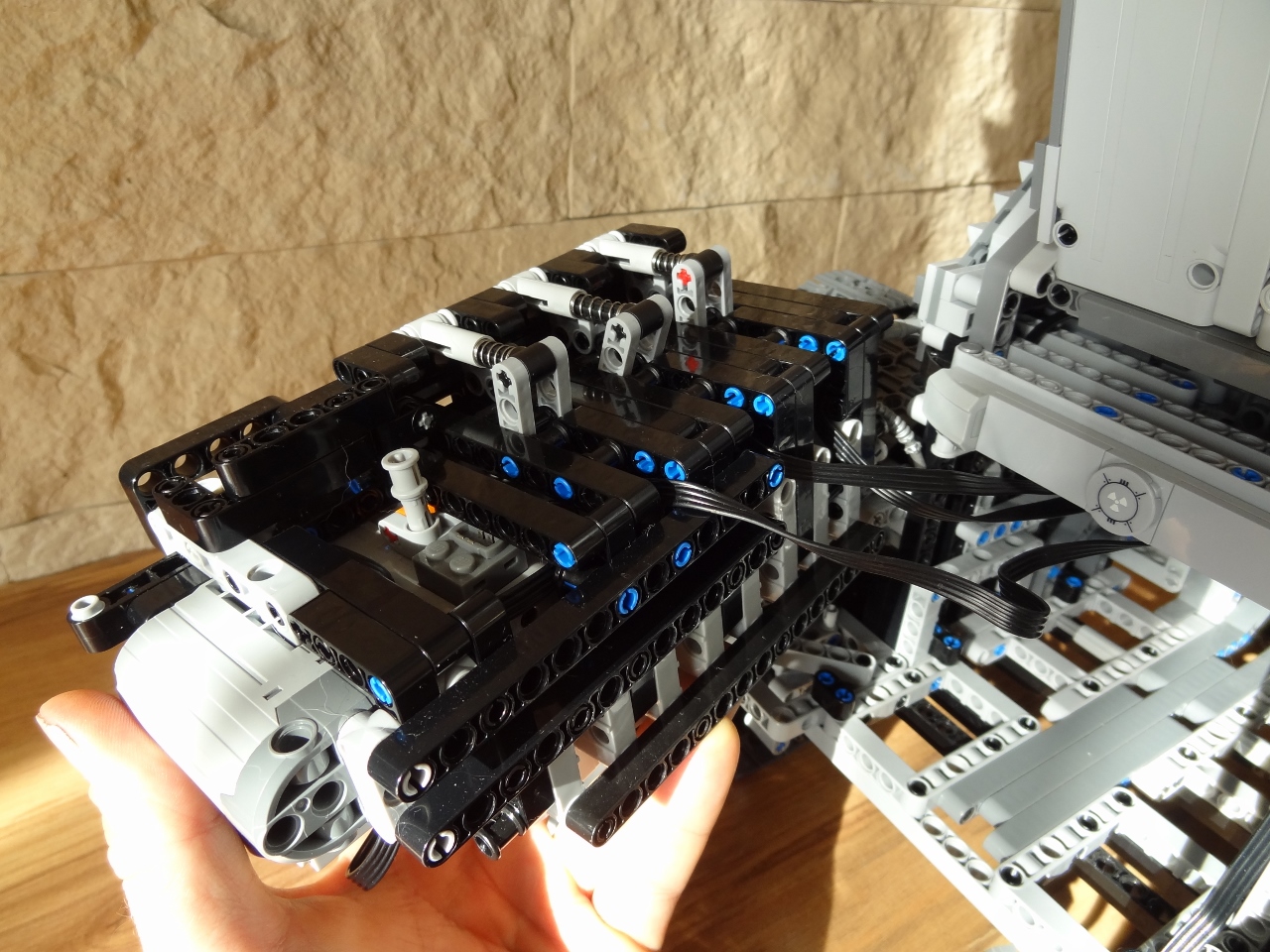
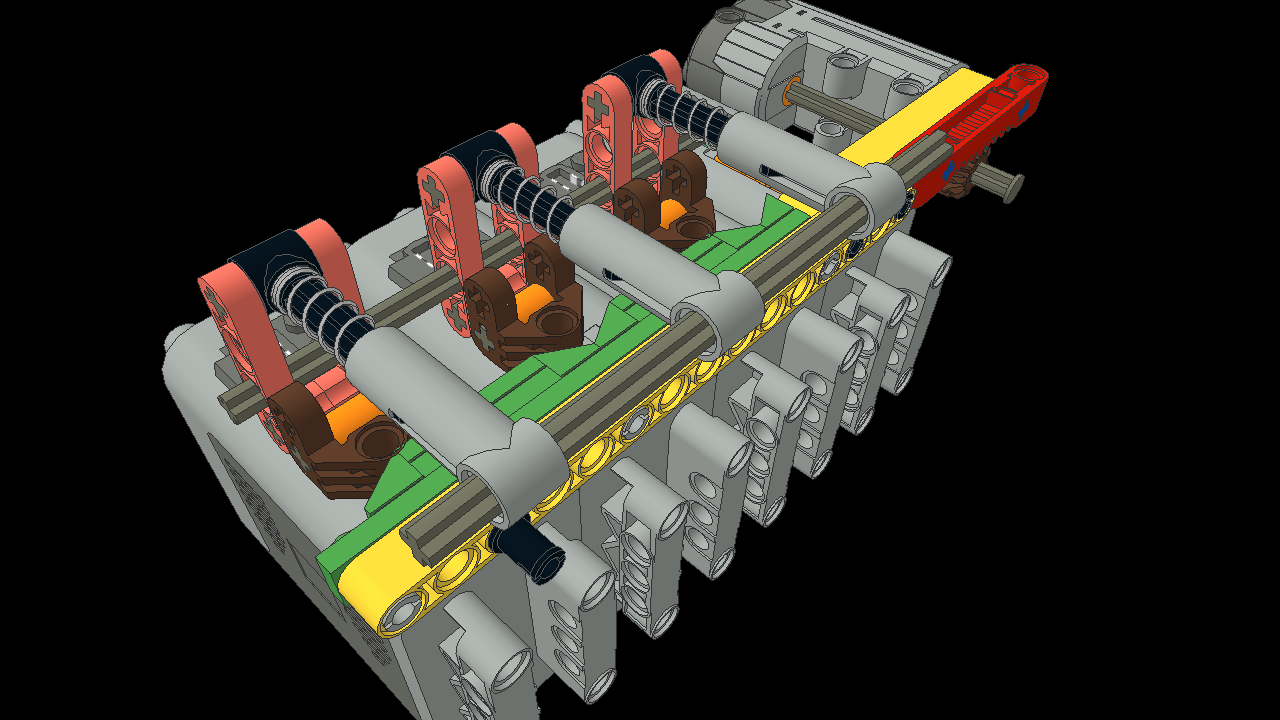
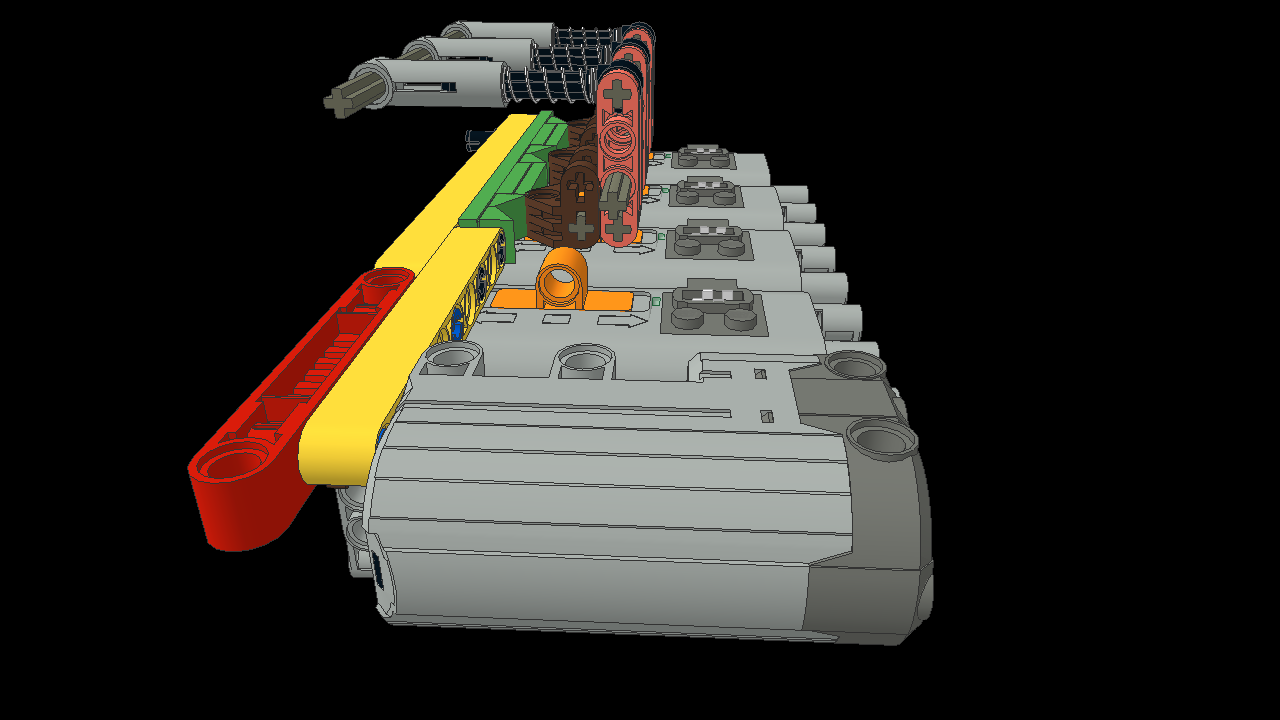
Akumulator
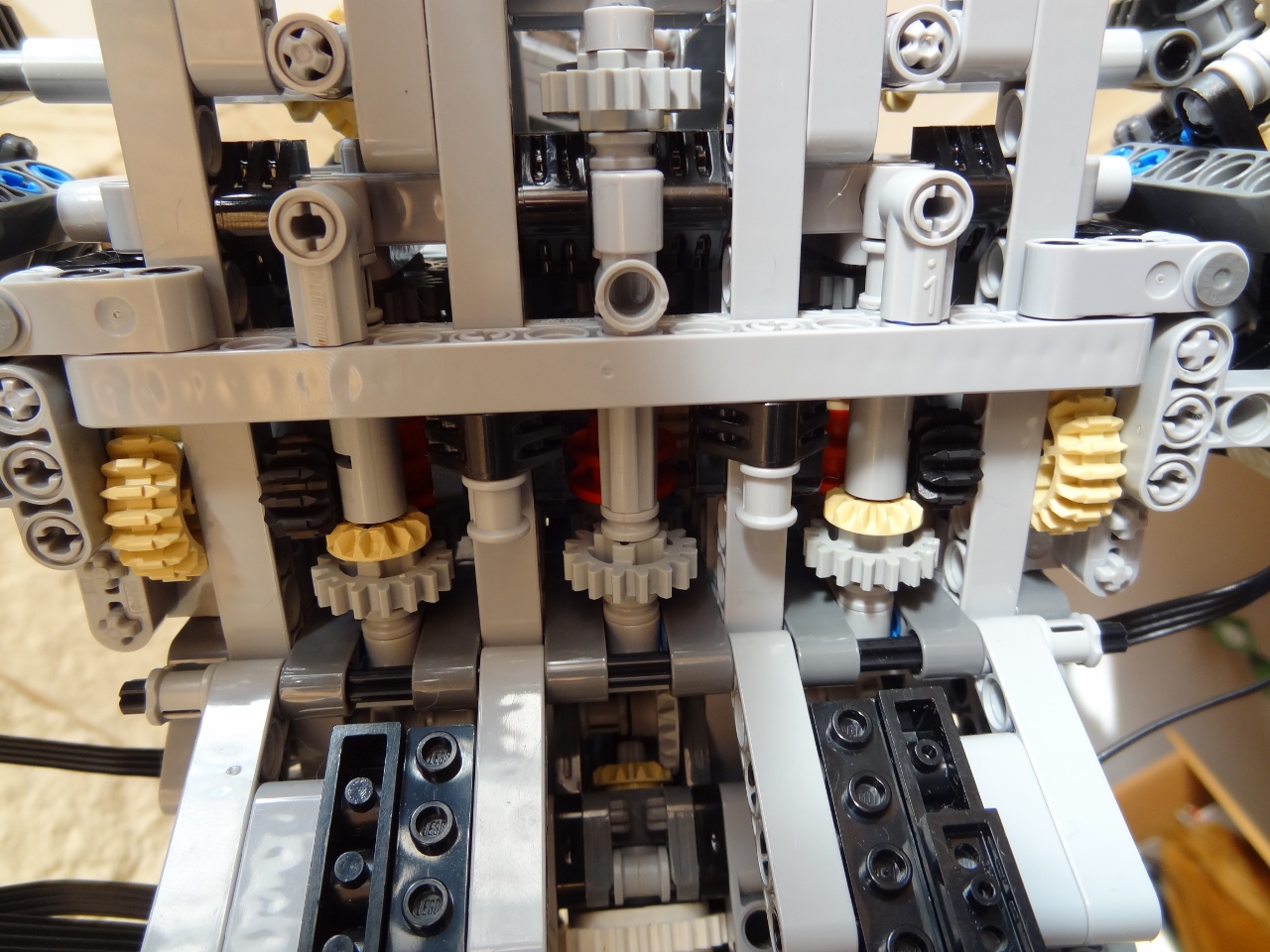
Za całą energię do robota oraz rozmnożenie funkcji odpowiada pakiet 4 dużych baterii w których skład wchodzi dodatkowo serwo PF i wieża IR. Do każdej z 3 baterii podłączone są po 3 wieże IR, a do każdej z wież po 2 silniki. To daje 6 silników na każdą baterię, czyli łącznie 18. Żeby wszystko działało w danym momencie może być załączona tylko jedna bateria i tu z pomocą przychodzi serwo które idealnie nadaje się do obsługi 3 pozycji (zero, w prawo, w lewo). Zasada działania jest prosta. Serwo porusza specjalną listwę na której są wytłoczenia. W te wytłoczenia wciskane są za pomocą amortyzatorów przełączniki poszczególnych baterii. Odpowiednie ustawienie wytłoczeń wyklucza przypadkowe włączenie więcej niż jednej baterii na raz, przy czym podczas przełączania zawsze następuje najpierw wyłączenie jednej baterii by po chwili załączyć następną. Do zasilania przełącznika (serwa) służy czwarta bateria jako niezależne zasilanie. Do wieży IR która jest na wyposażeniu podłączone jest serwo oraz silnik M przełącznika który opiszę poniżej.
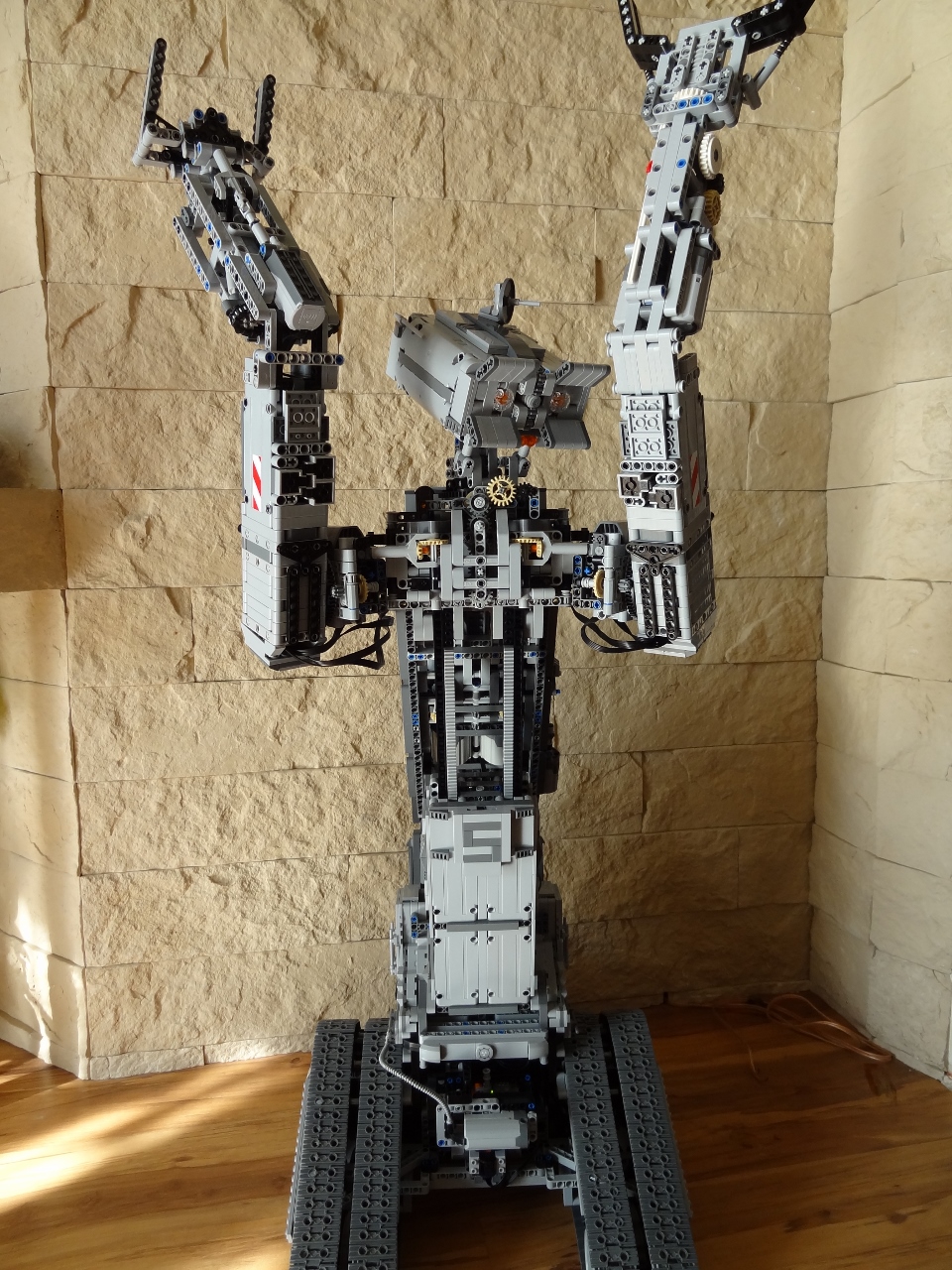
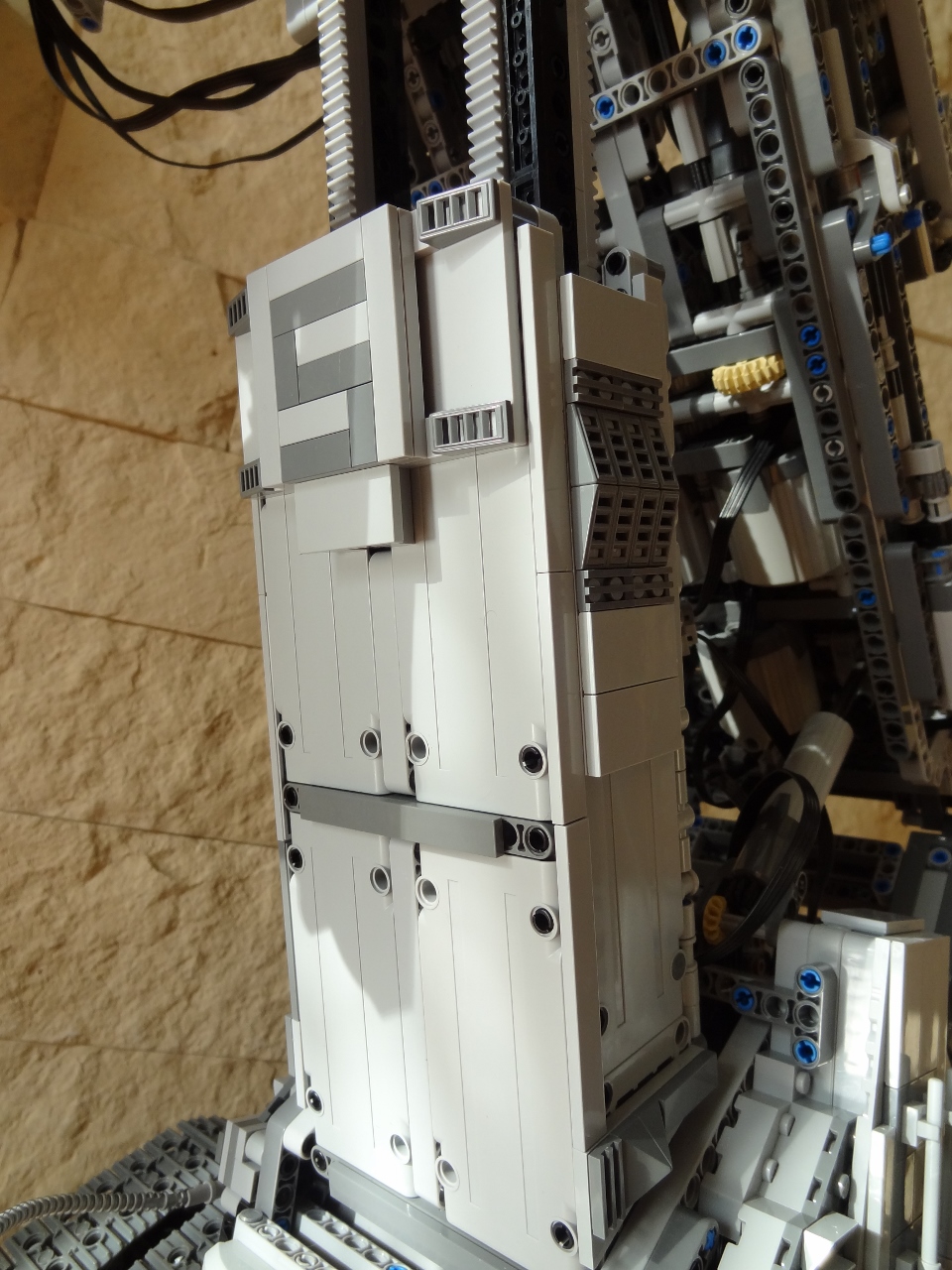
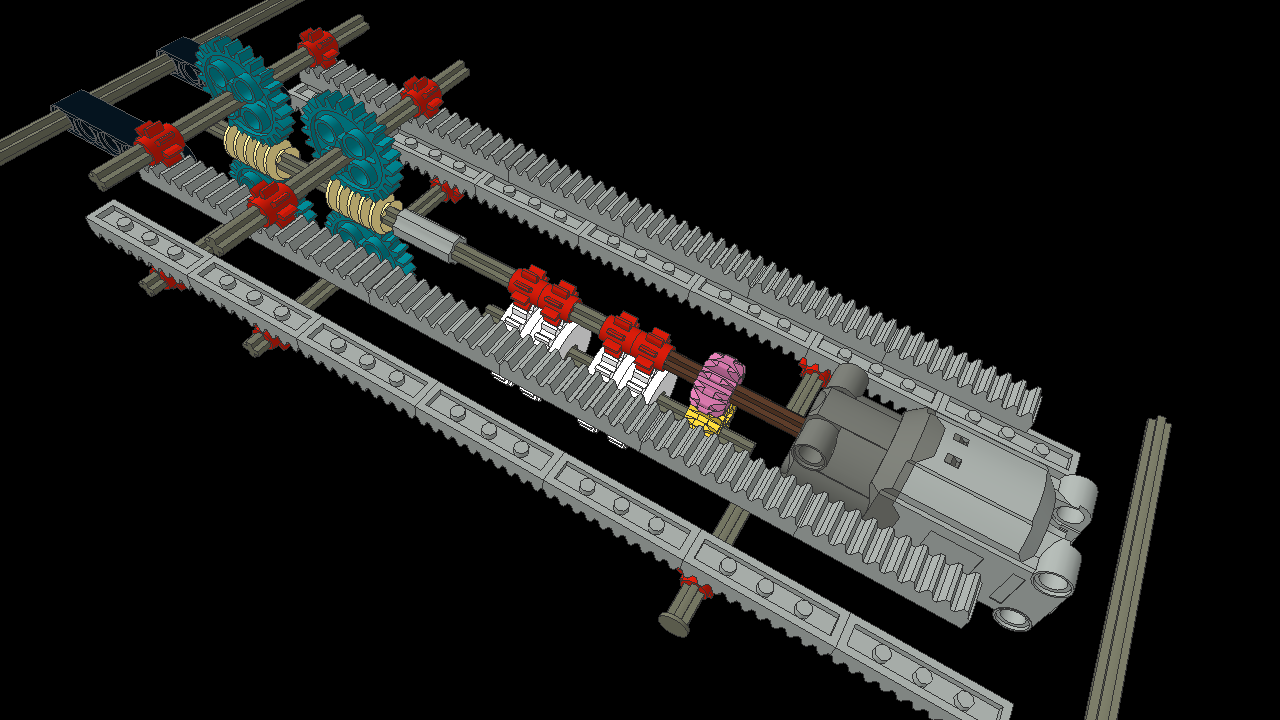
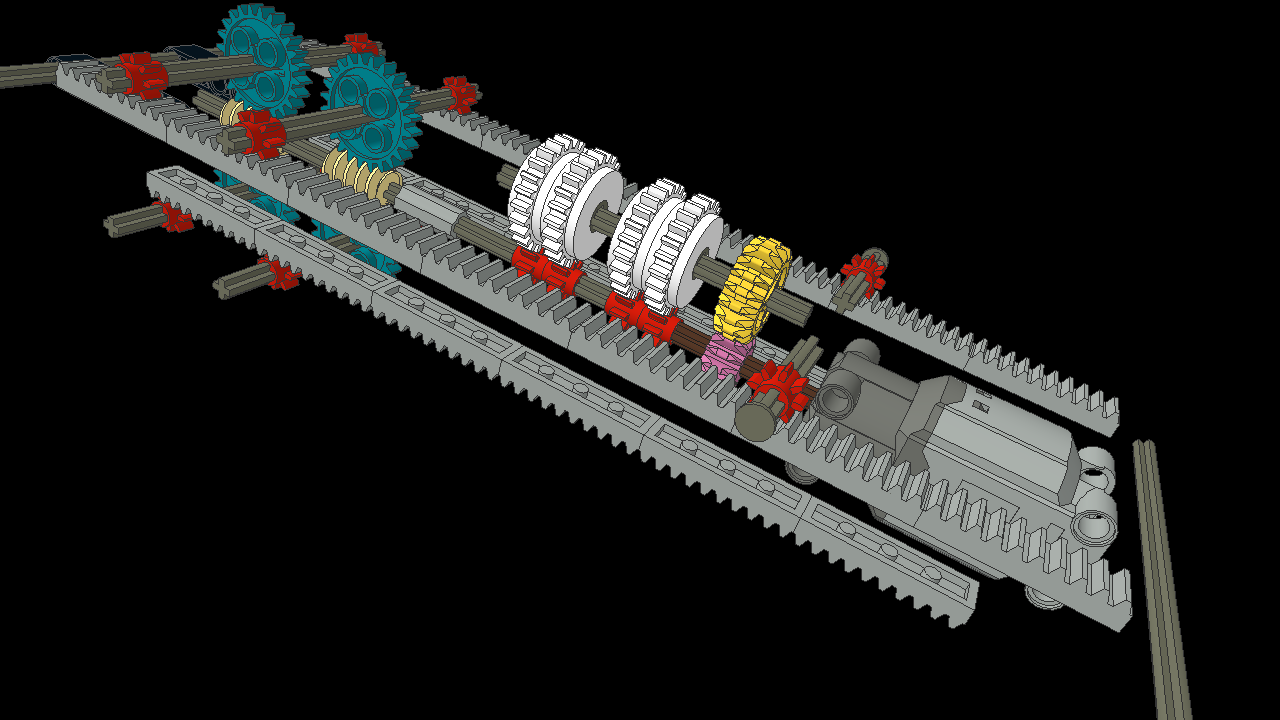
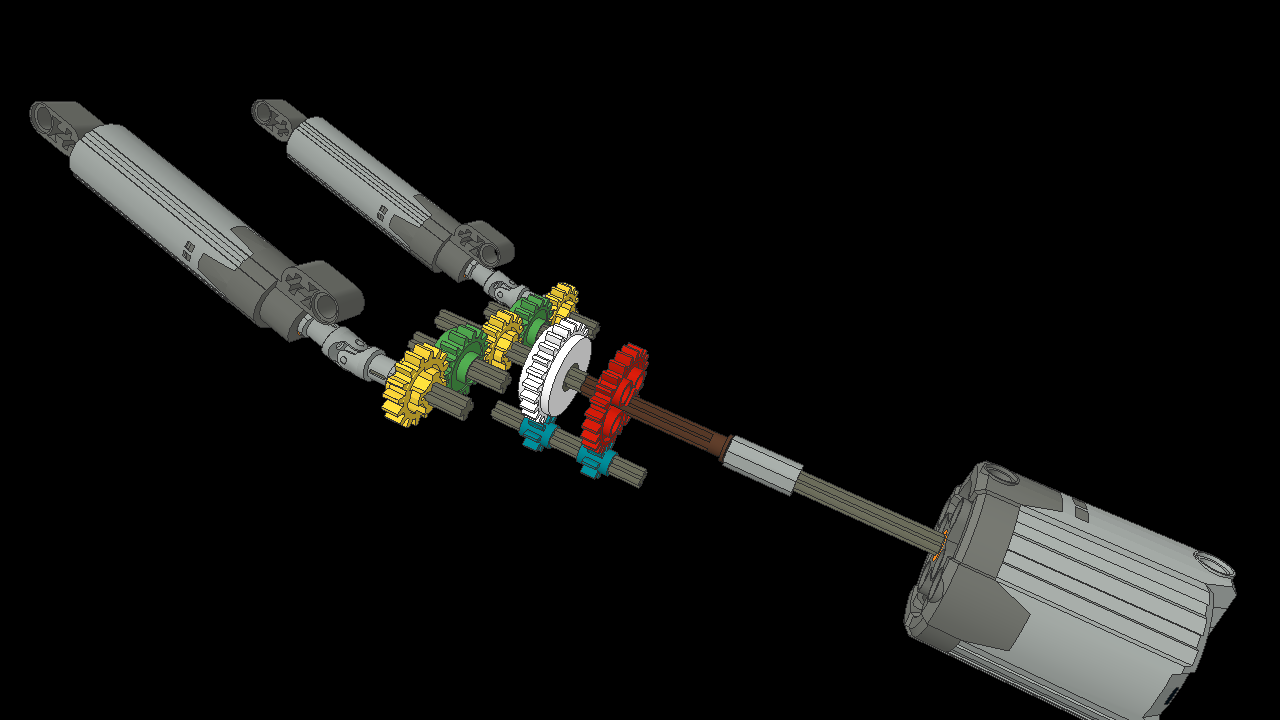
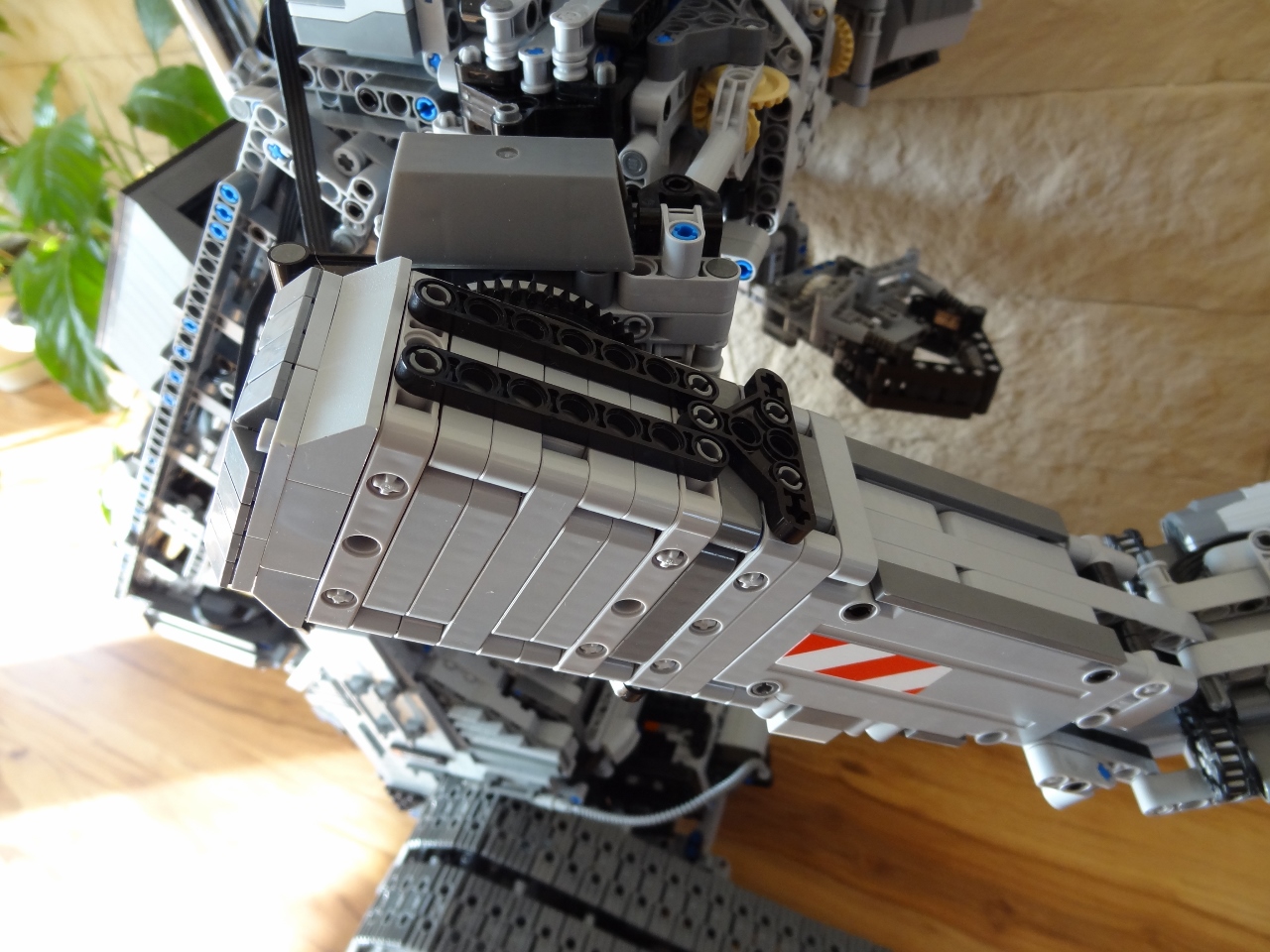
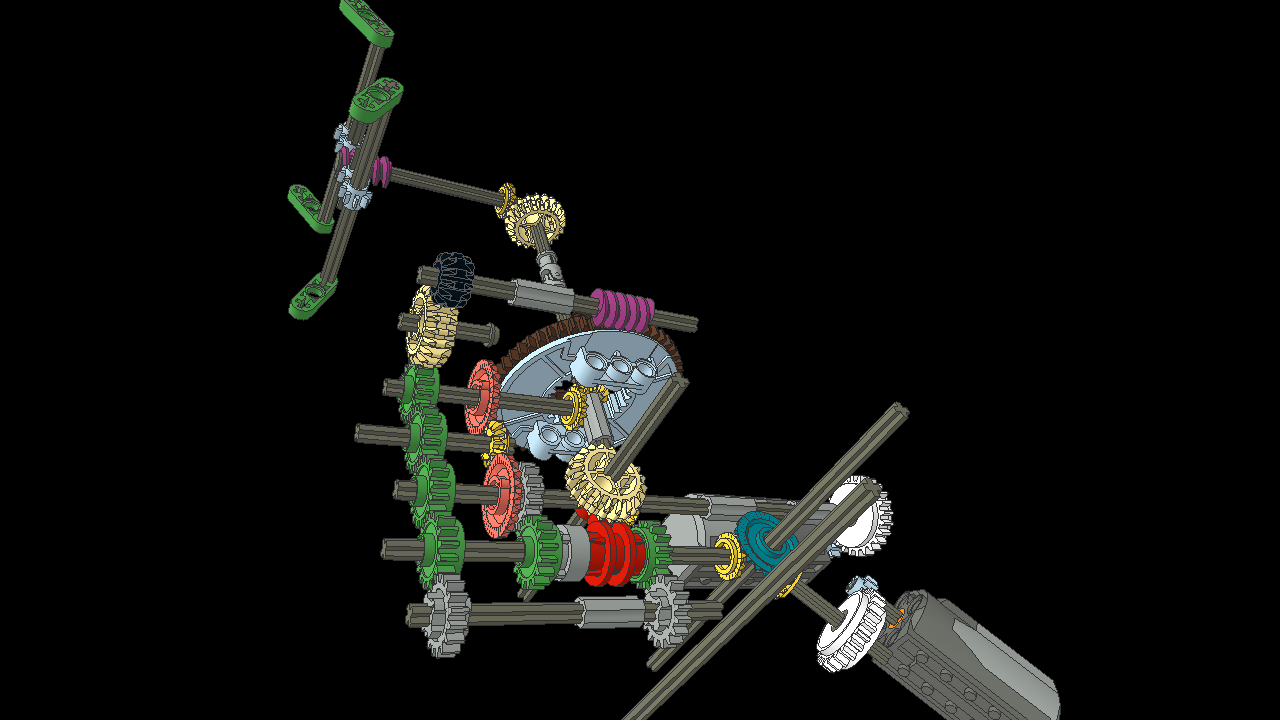
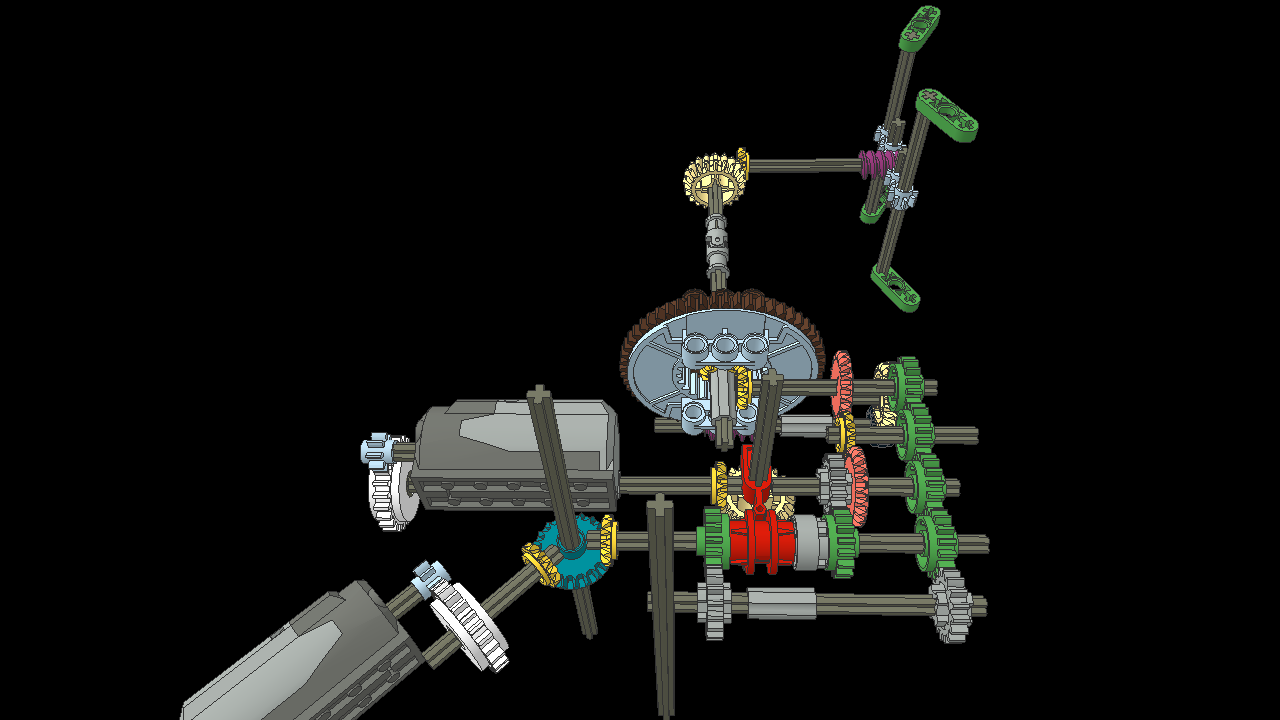
Podnoszenie
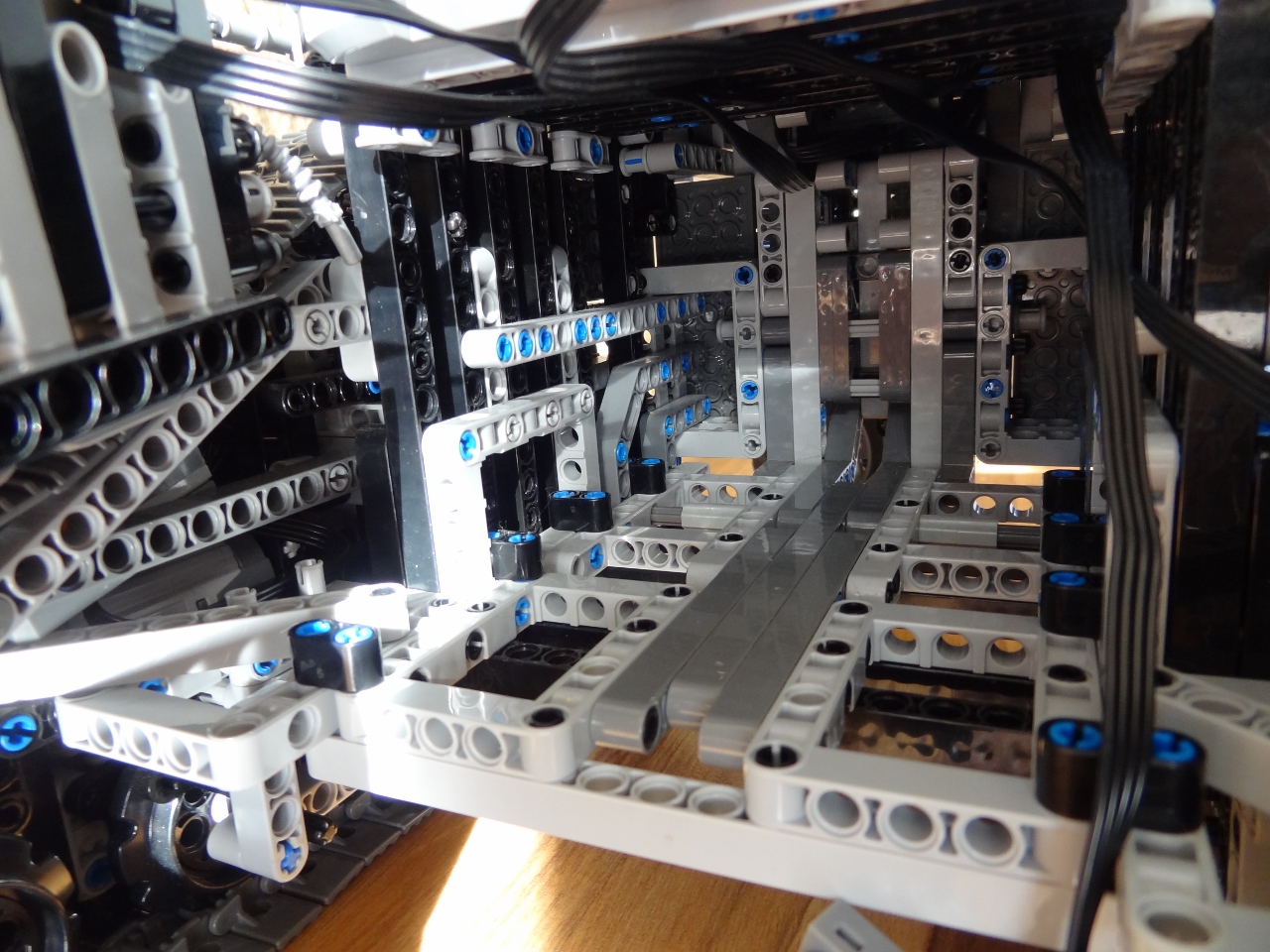
Robot wyposażony jest w funkcję podnoszenia dla zwiększenia jego możliwości. Zakres tej pracy wynosi 15 cm i jest ograniczony jak zwykle moimi możliwościami klockowymi. Do podnoszenia skonstruowałem specjalny siłownik którego głównym elementem są listwy zębate. Do napędu użyłem jednego silnika L, a całość zabezpieczyłem poczwórnym sprzęgłem. By wycisnąć z silnika jak najwięcej i jednocześnie zabezpieczyć mechanizm zastosowałem 4 sprzęgła w jednej linii po czym zastosowałem technikę którą nazywam "rozmnażaniem". W skrócie zaczynając od 2 ślimaków idą kolejno, 4 zębatki z24, 8 zębatek z8, a dalej na 4 rzędy listew zębatych. Dzięki takiemu rozwiązaniu mechanizm nigdzie nie jest przeciążony a dodatkowo jest wydajny i zabezpieczony sprzęgłami przy skrajnych położeniach listew.
Podnoszenie odbywa się prostopadle do podłoża i tu następuje pewna ciekawostka konstrukcyjna. Jej kluczowym elementem są 4 specjalne cięgna ułożone w pary po 2. Przymocowane są one do "pleców" i do konstrukcji nośnej. Ich ilość oraz odpowiednie miejsce zabudowy umożliwiają właśnie prostopadłe podnoszenie. Kolejnym ważnym elementem jest "kark" który spina ze sobą siłownik od dołu oraz "plecy" od tyłu. Element "karku" jest regulowany i opiszę go poniżej.

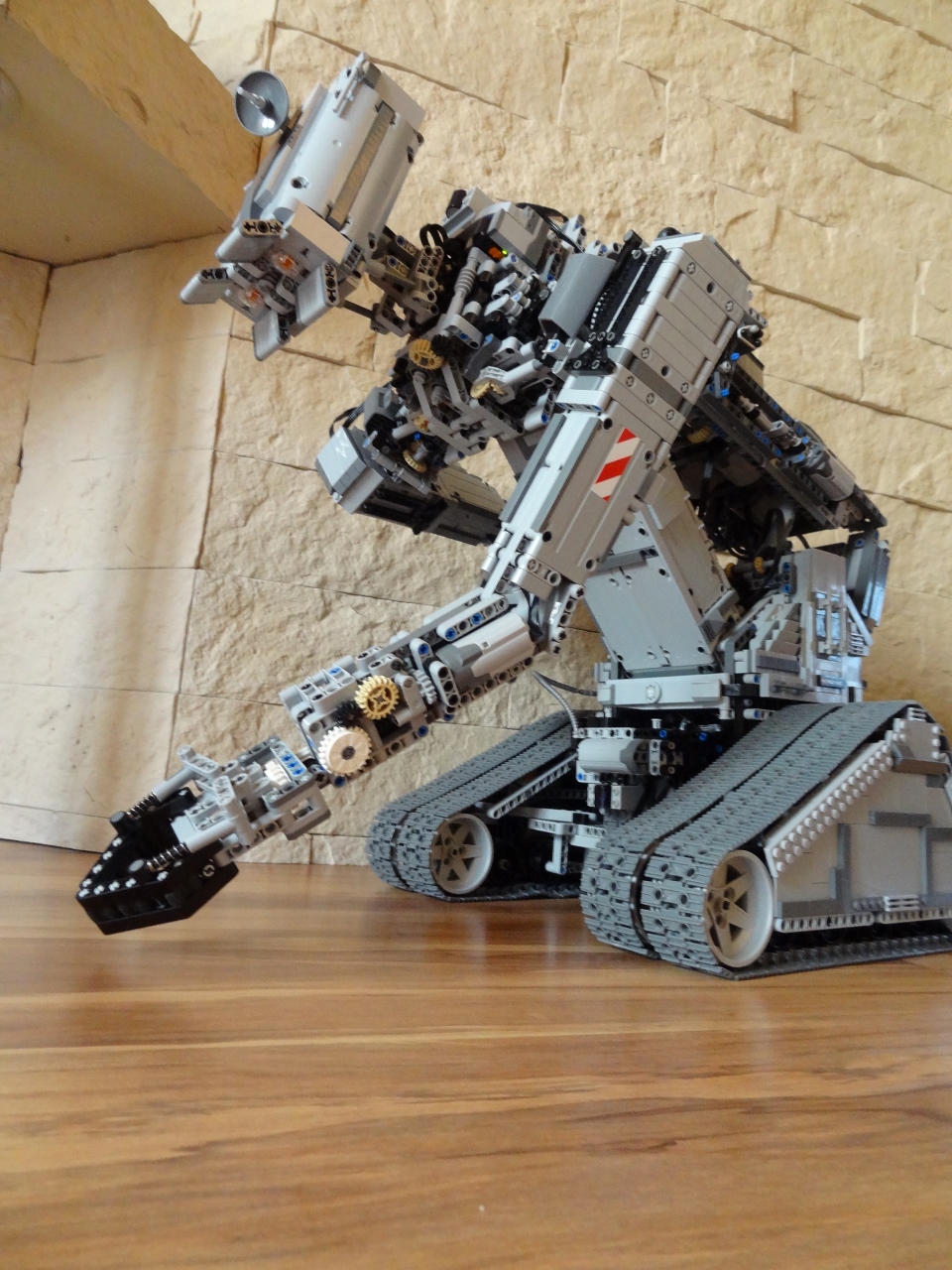
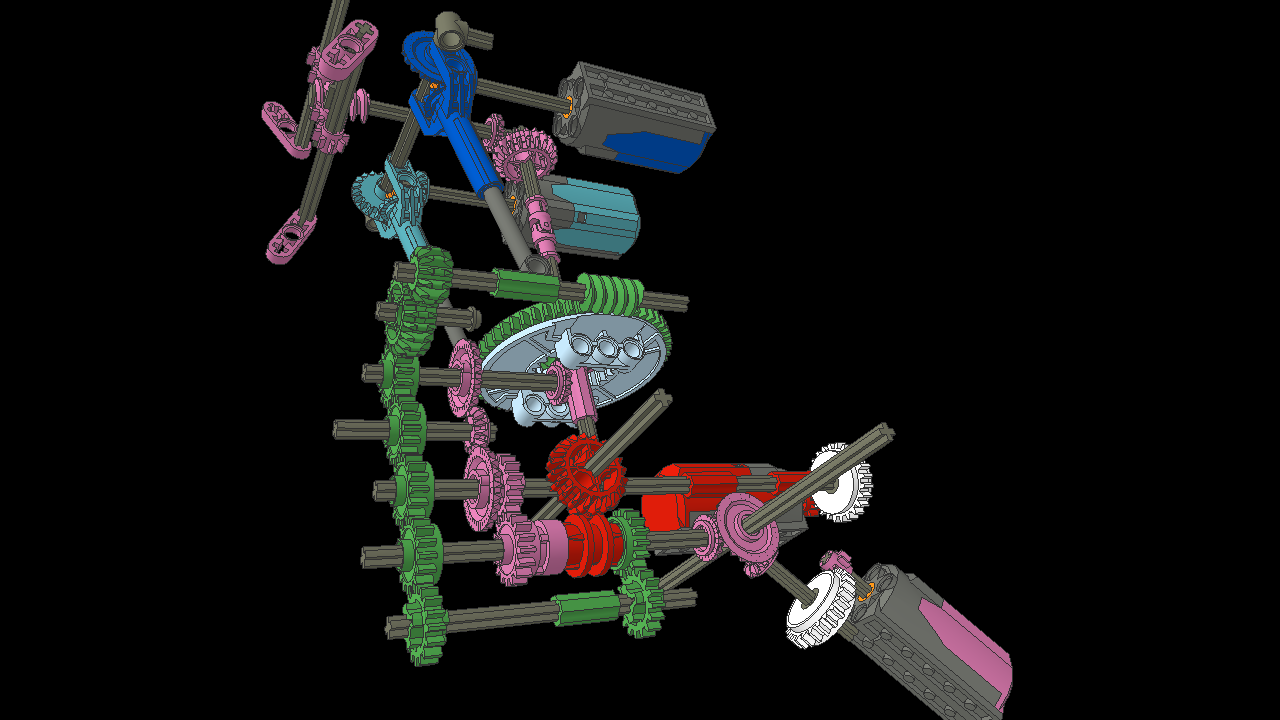
Pochylanie
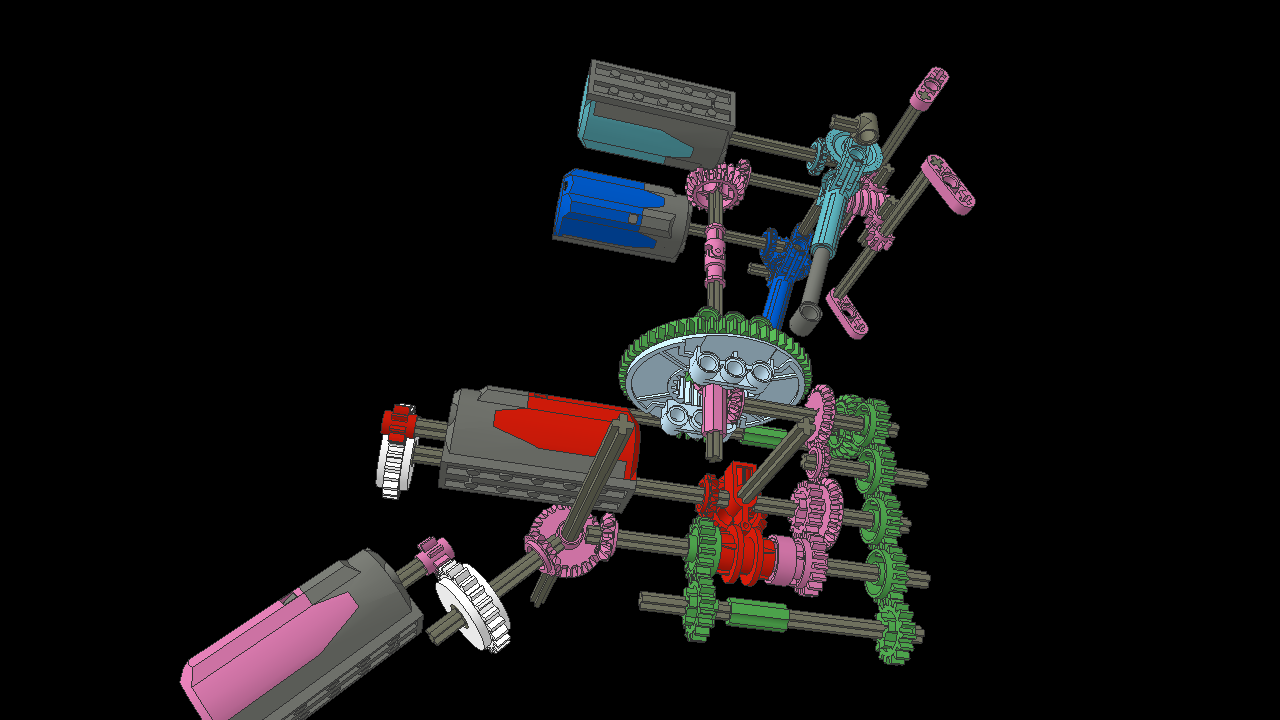
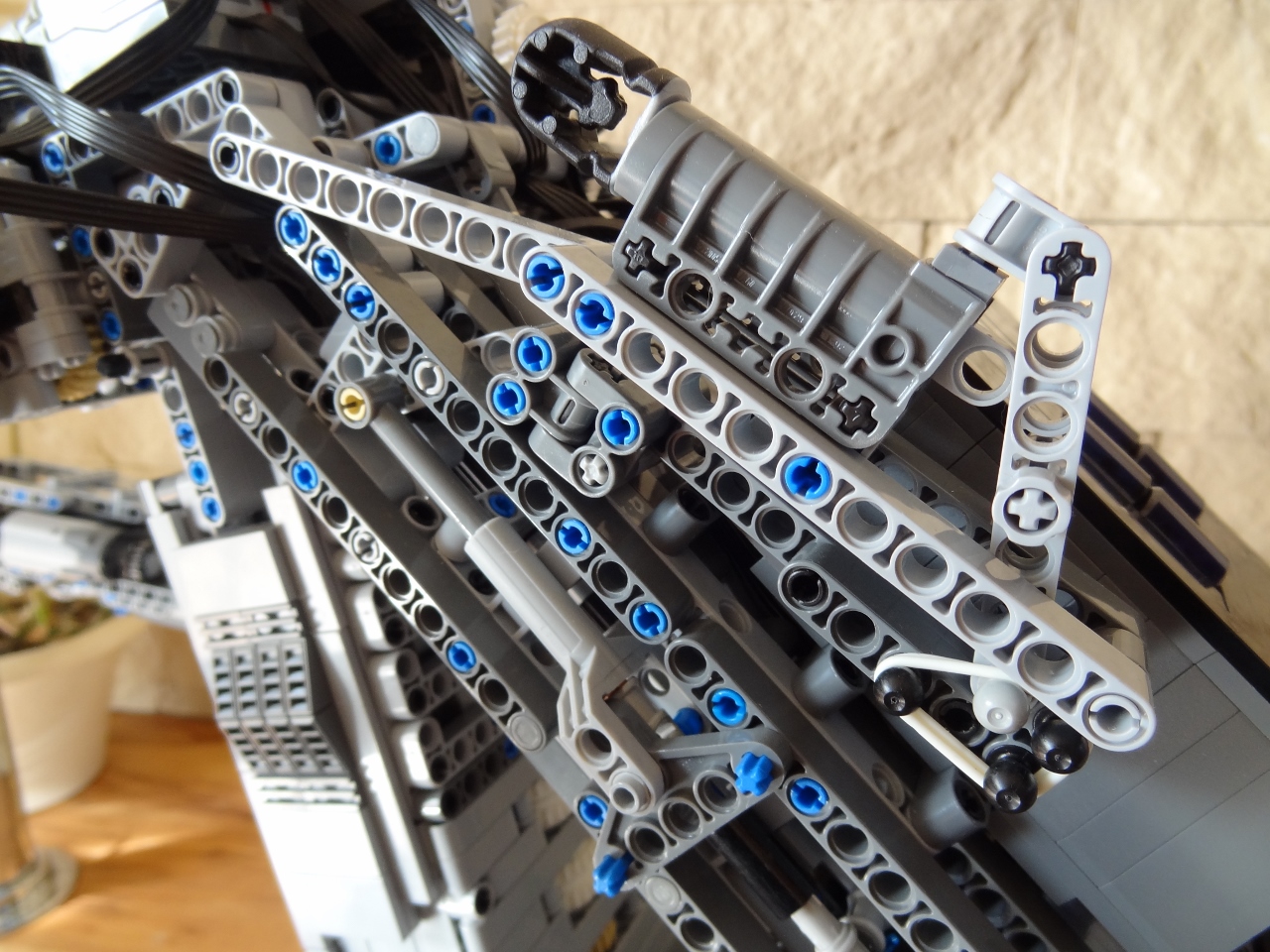
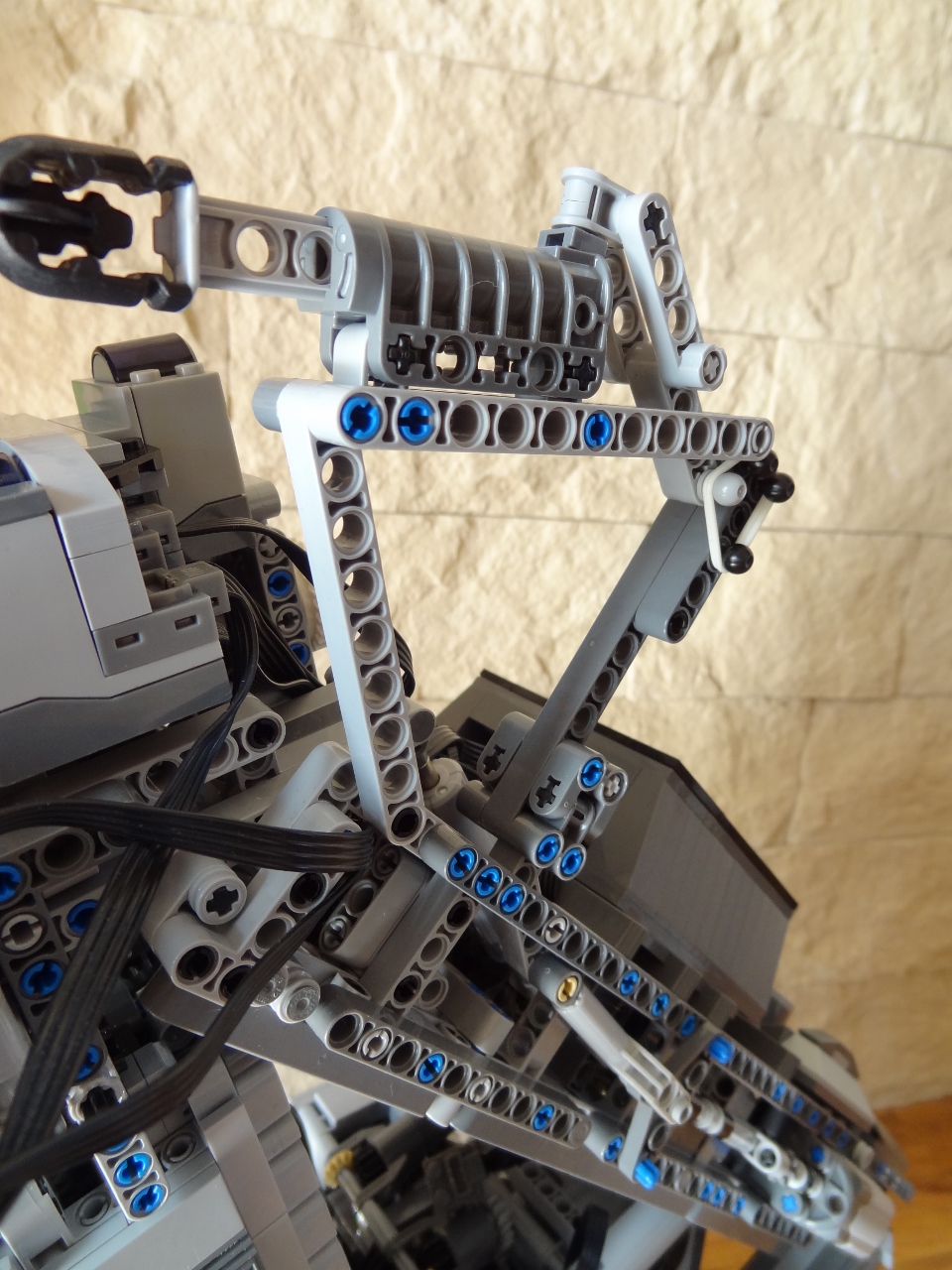
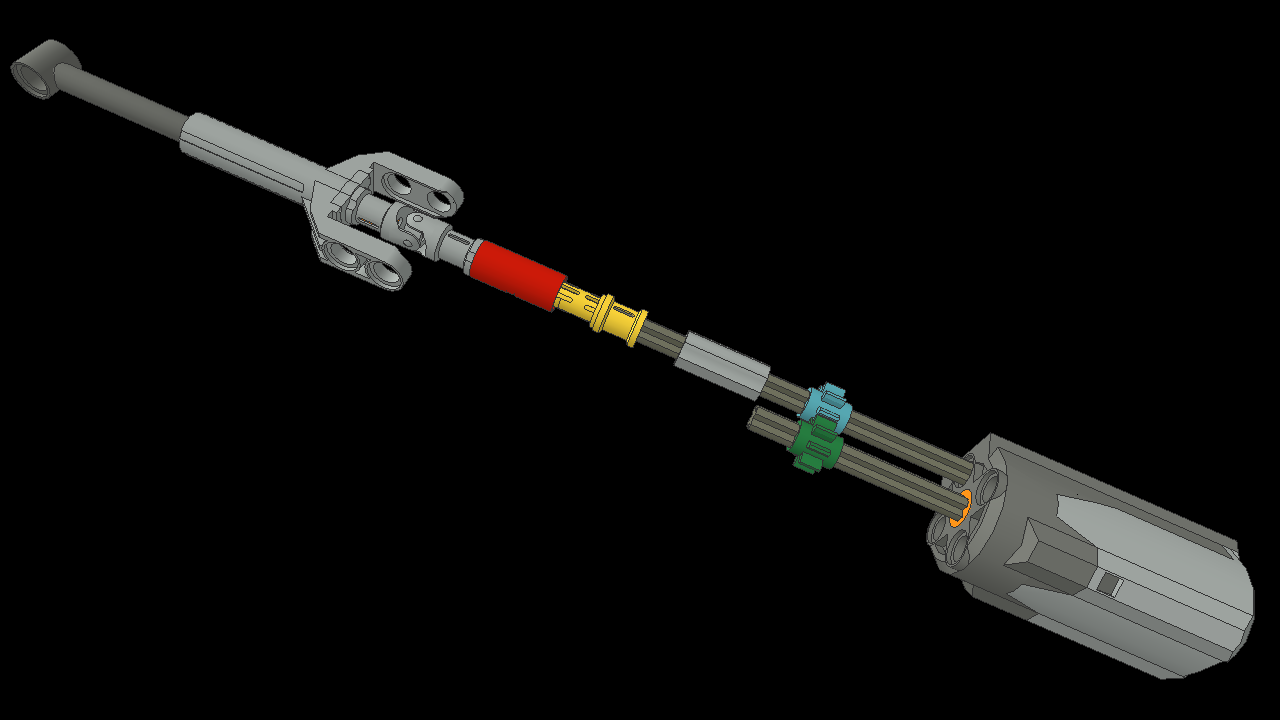
Pochylanie robota do przodu jest dość prostym zabiegiem i polega na skróceniu dystansu między siłownikiem a tylną parą cięgien. Skrót ten wykonują 2 duże siłowniki śrubowe które pełnią także rolę drugiej pary cięgien. Do napędu siłowników służy silnik XL. Nie ma sprzęgła z uwagi na potrzebę użycia dużej mocy.


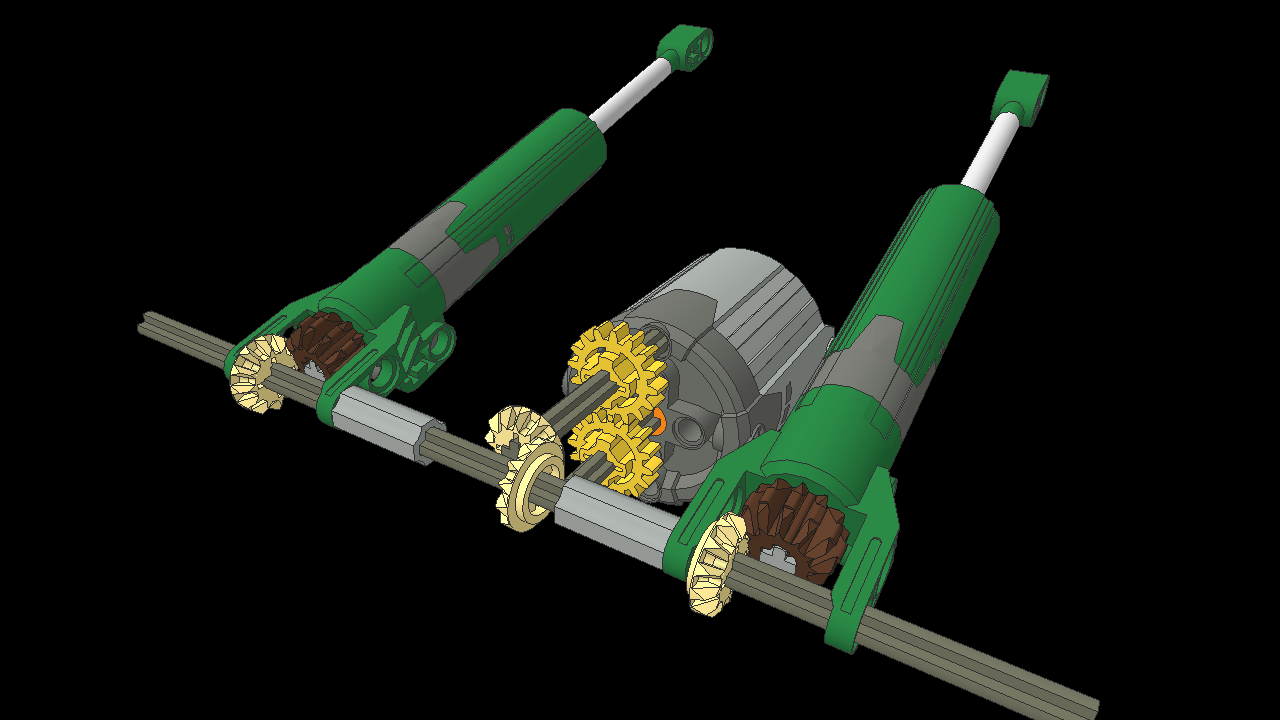
Kark
Ruchowy kark reguluje położenie ramion. Regulację tą wykonują 2 duże siłowniki śrubowe. Do wykonania tej funkcji nie potrzeba dużej mocy dlatego też jest zabezpieczona sprzęgłem i zasilana silnikiem XL. Zastosowanie takiego silnika miało na celu zwiększenie przeciwwagi i dlatego jest on z tyłu.


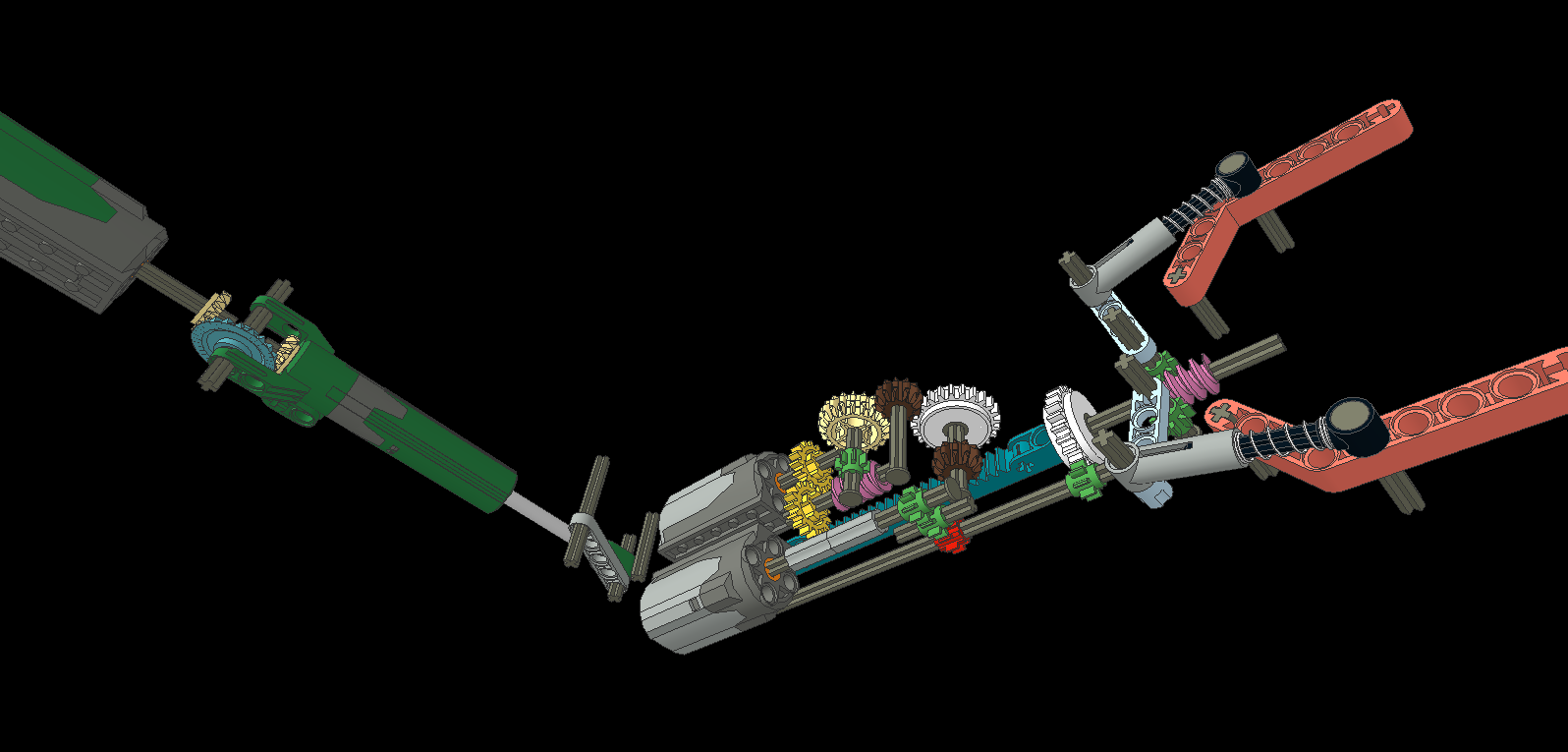
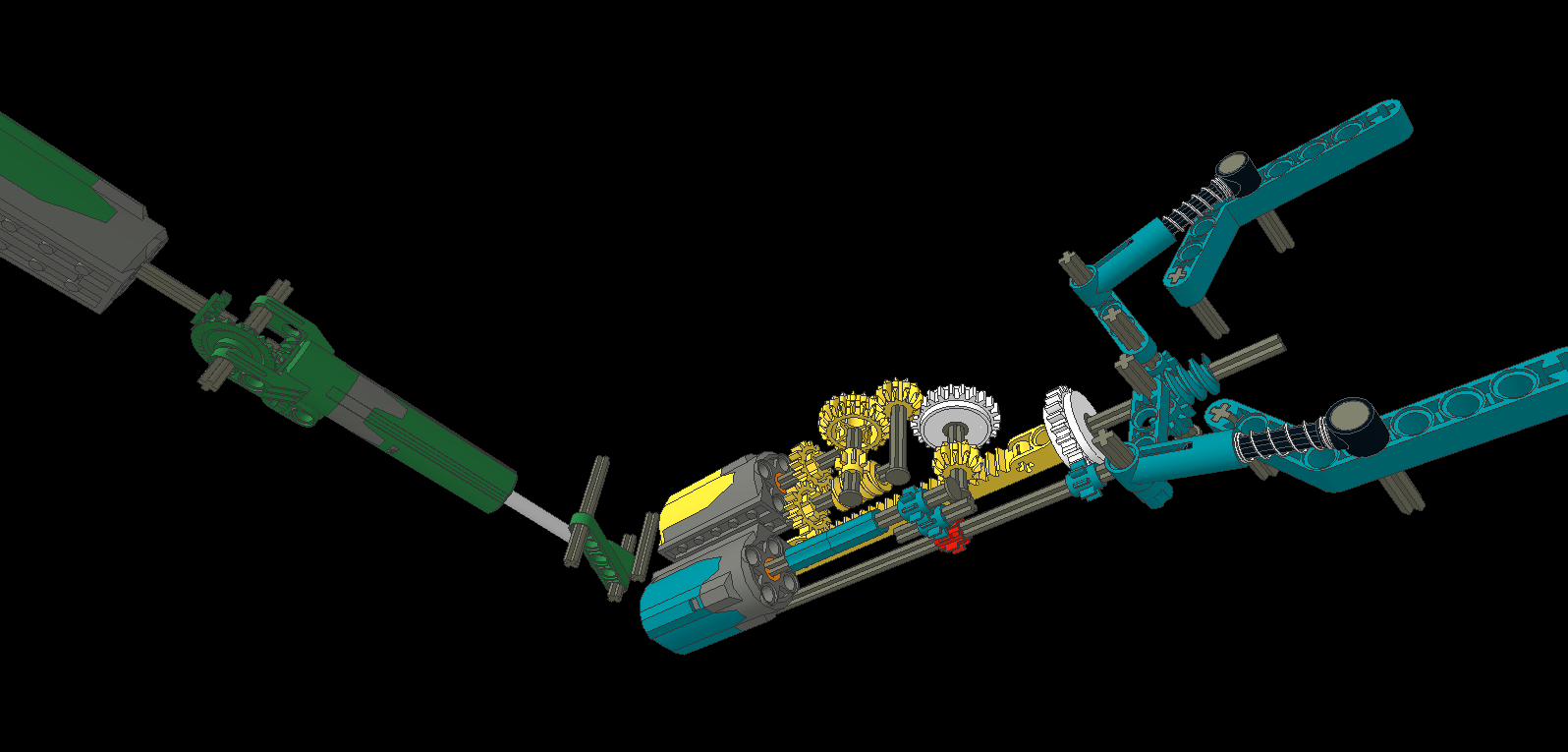
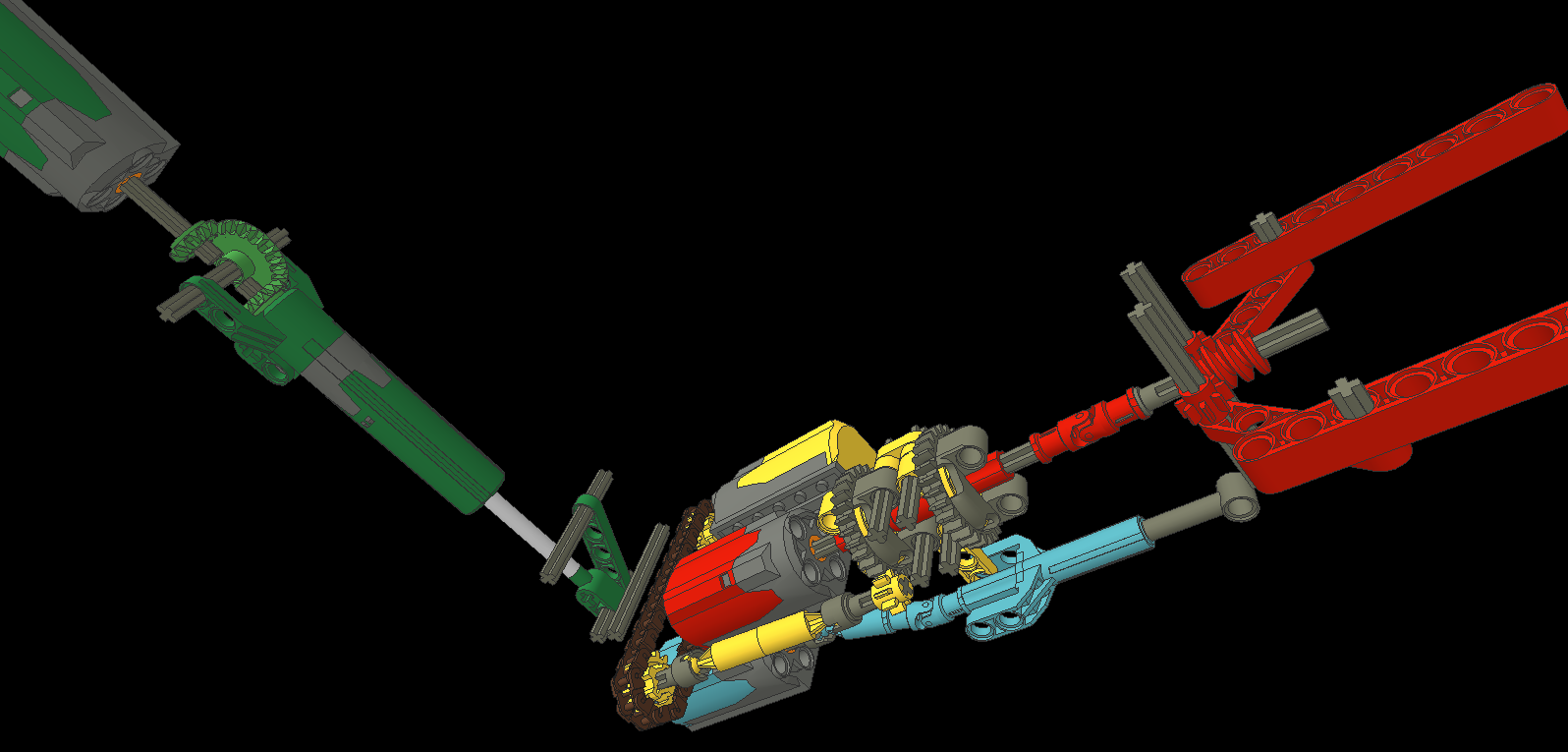
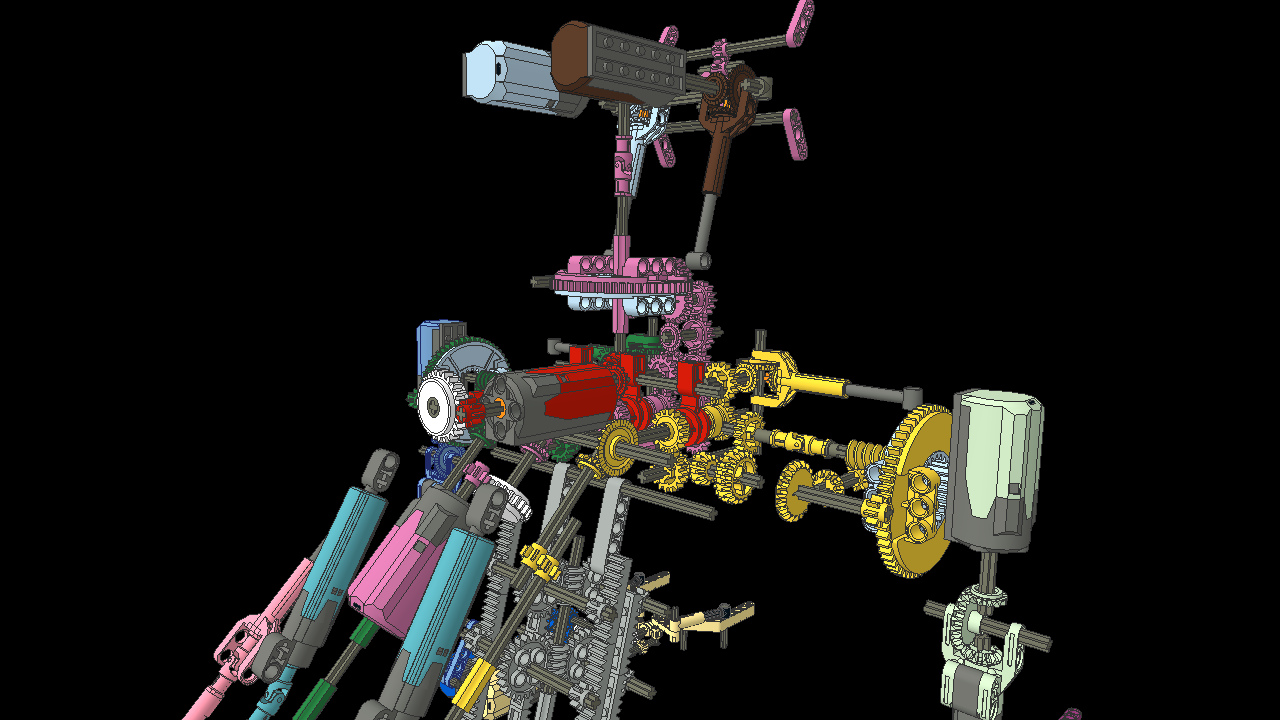
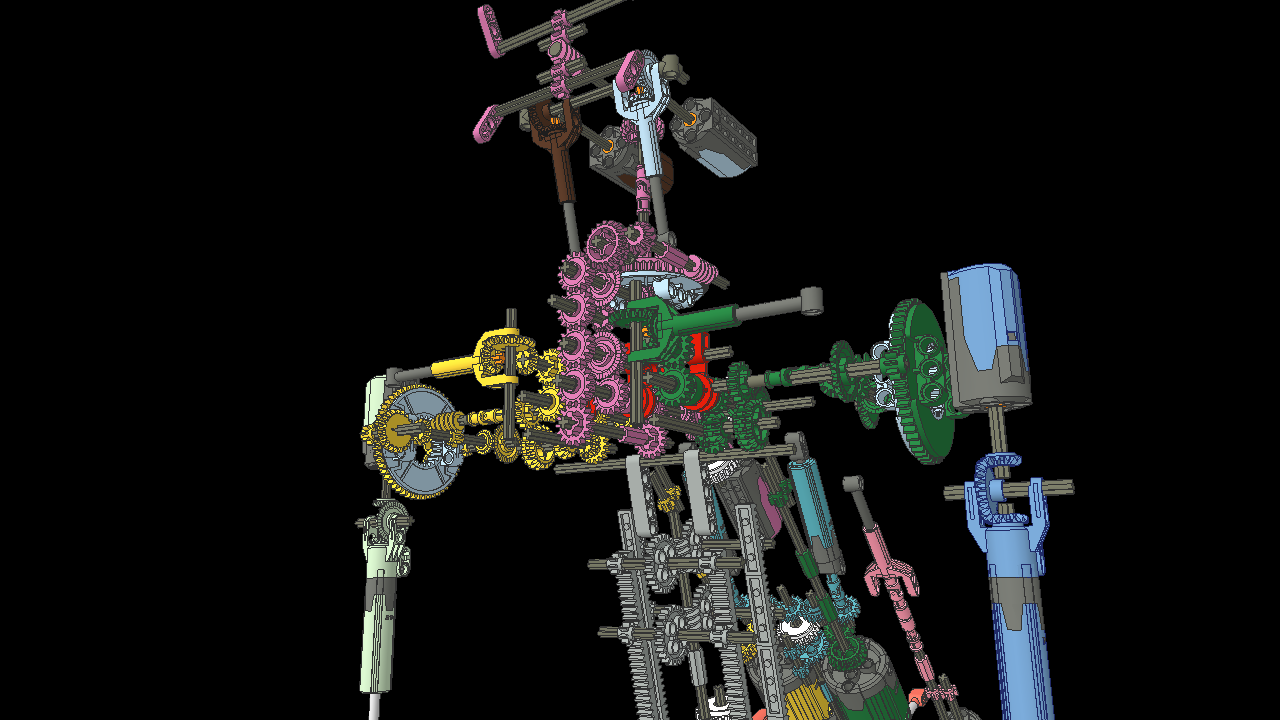
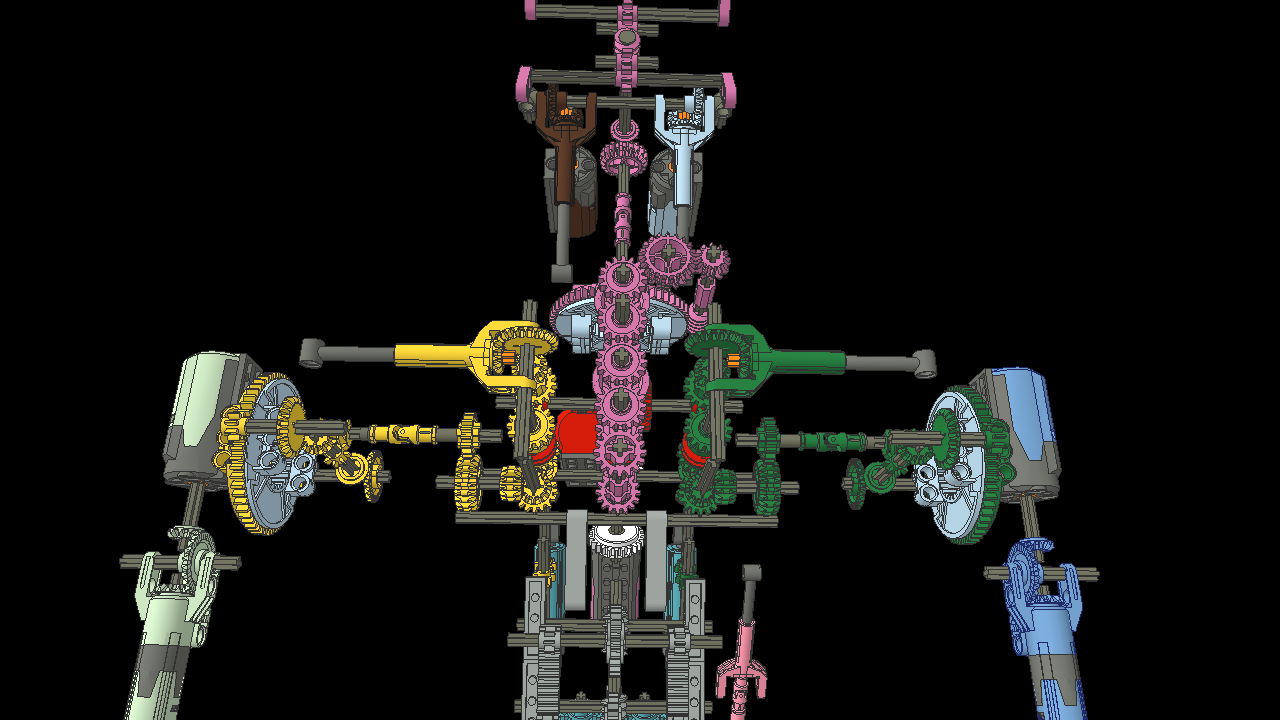
Ramiona
Ten element sprawił mi największą trudność a jednocześnie sprawił najwięcej przyjemności w obmyślaniu jego konstrukcji.
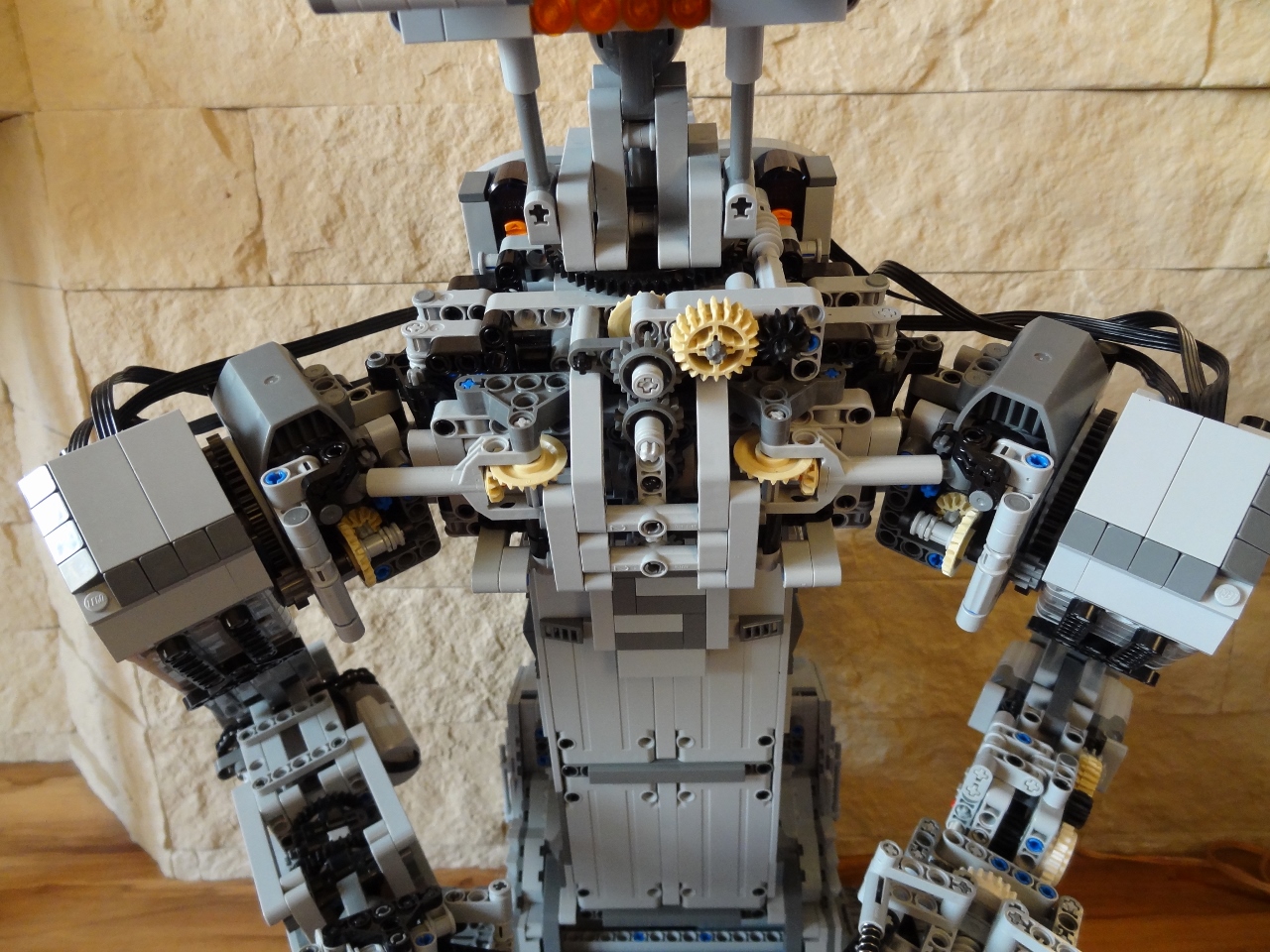
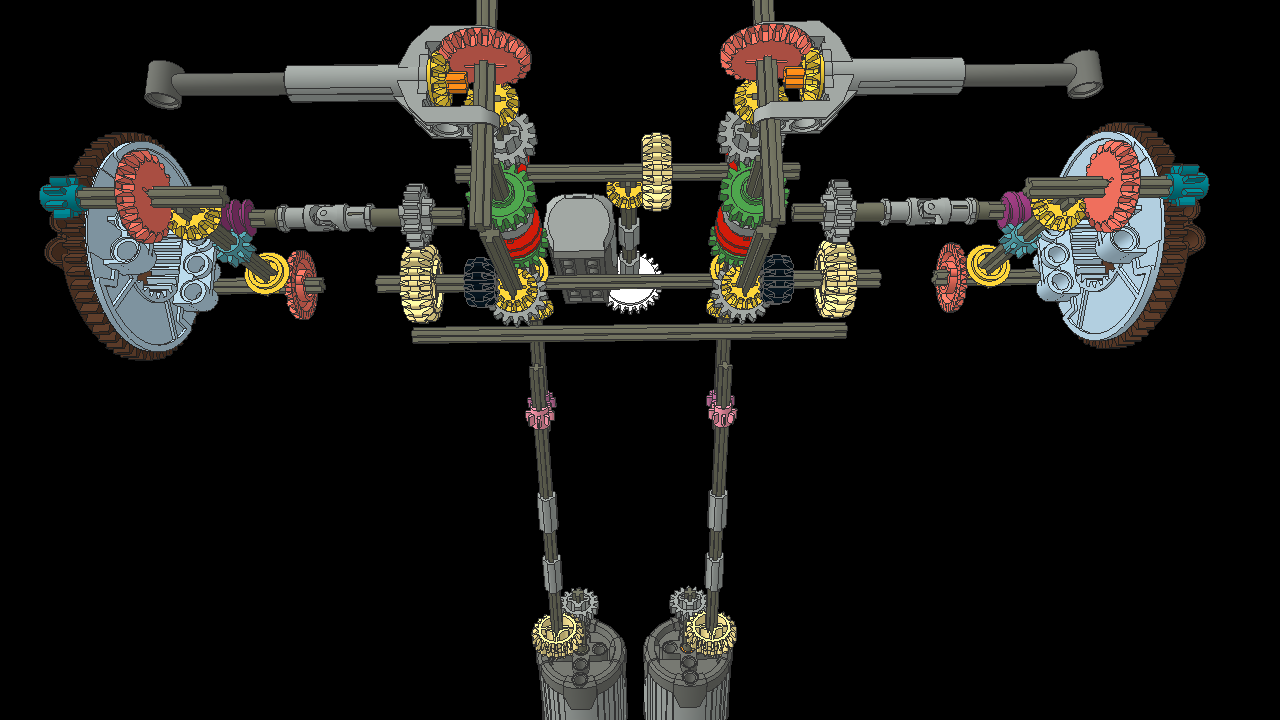
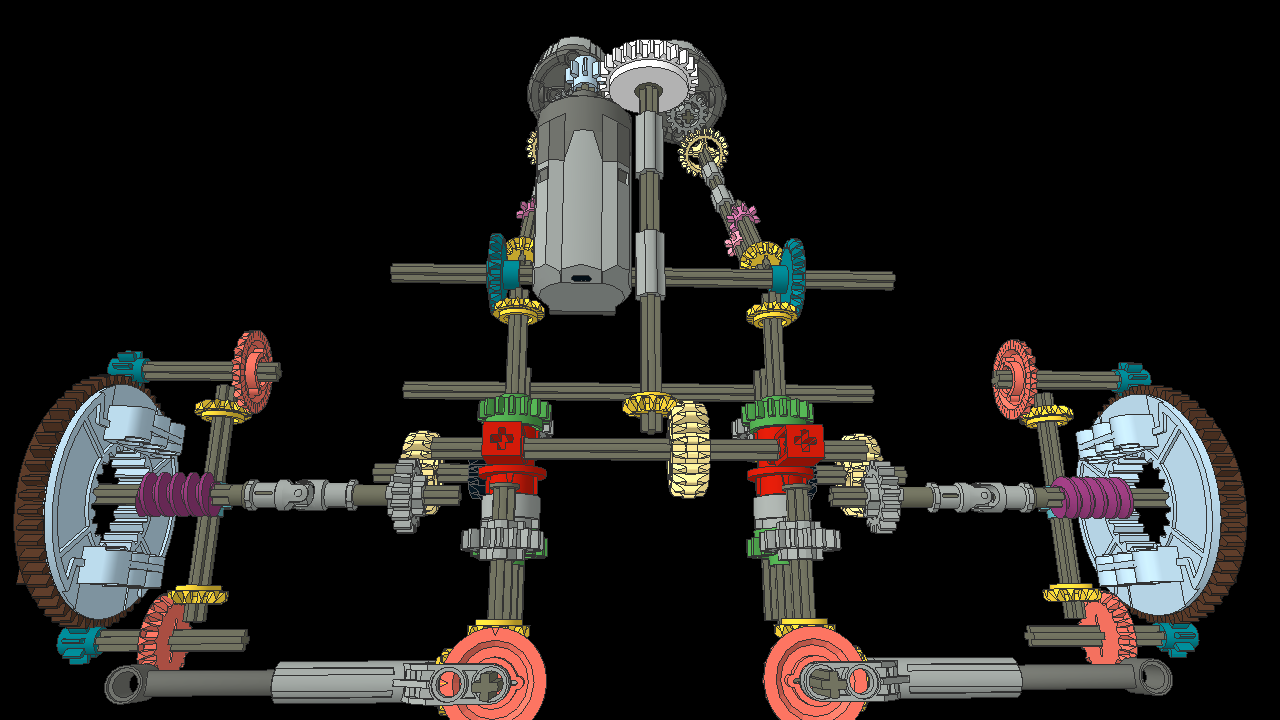
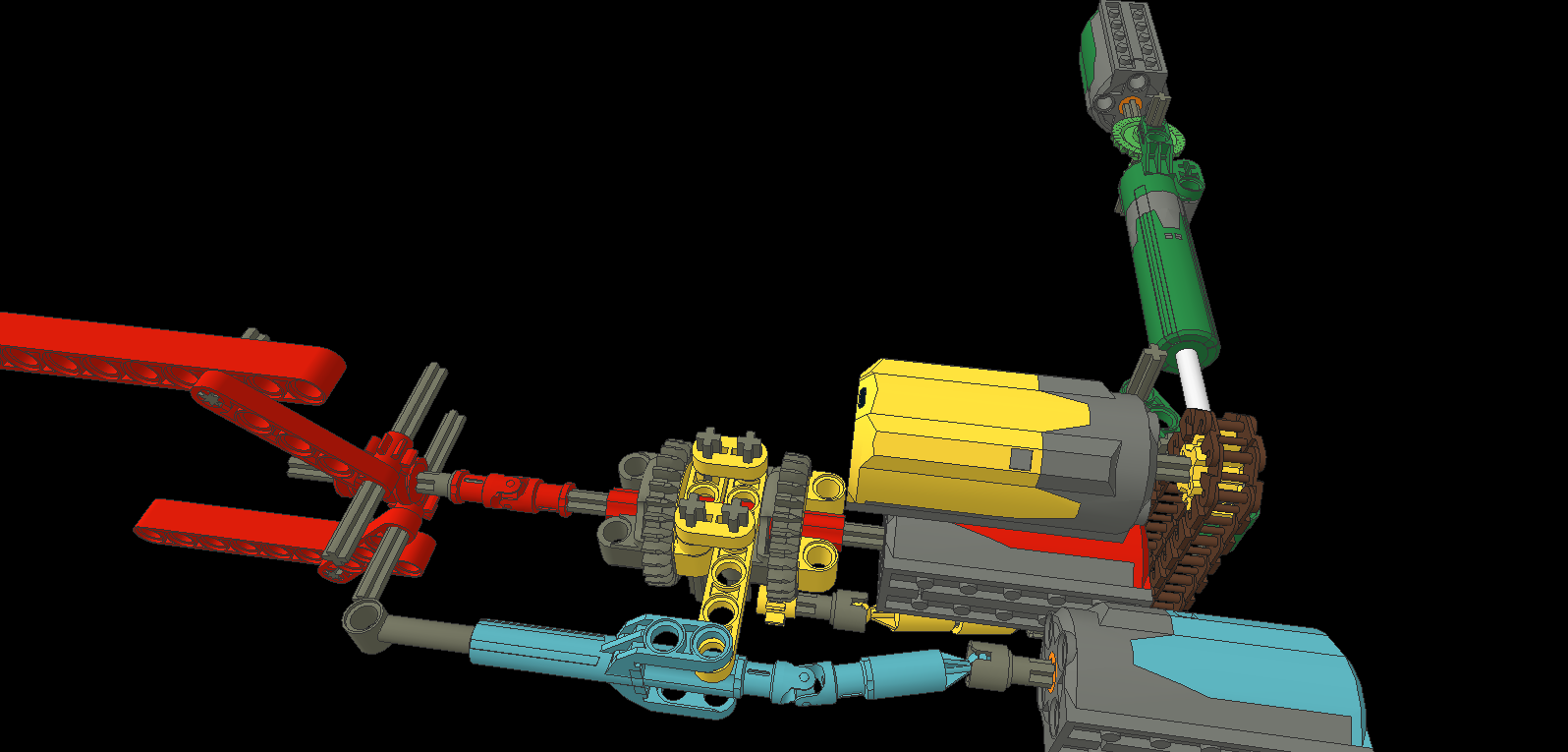
Element karku mieści w sobie 3 przełączniki pierścieniowe które zwiększają ilość funkcji. Lewy przełącznik obsługuje lewe ramię a więc poruszanie całą ręką oraz po przełączeniu odchylanie jej w poziomie za pomocą małego siłownika śrubowego. Do napędu służy silnik XL i jest on zabudowany z tyłu pleców. Wybór silnika XL podyktowany był odległością, potrzebą dużej mocy do poruszania ręki oraz przeciwwagą.
Prawy przełącznik jest lustrzanym odbiciem lewego i spełnia takie samo zadanie.
Środkowy przełącznik pierścieniowy obsługuje obrót głowy oraz poruszanie powiekami. Funkcje te nie wymagają siły a wręcz celowego osłabienia stąd też użycie sprzęgła tuż za silnikiem M który znajduje się w plecach.
Do oczów podłączone są światła i działają tylko podczas ruchu powiek. Niestety podłączone są pod wieżę IR zamiast bezpośrednio pod baterię. Tutaj zwyczajnie zabrakło mi przedłużek.
Wszystkie 3 pierścienie przełączają się dzięki silnikowi M, usprzęglonego i zabudowanego na karku a podłączonego pod wolny kanał wieży na czwartej baterii.
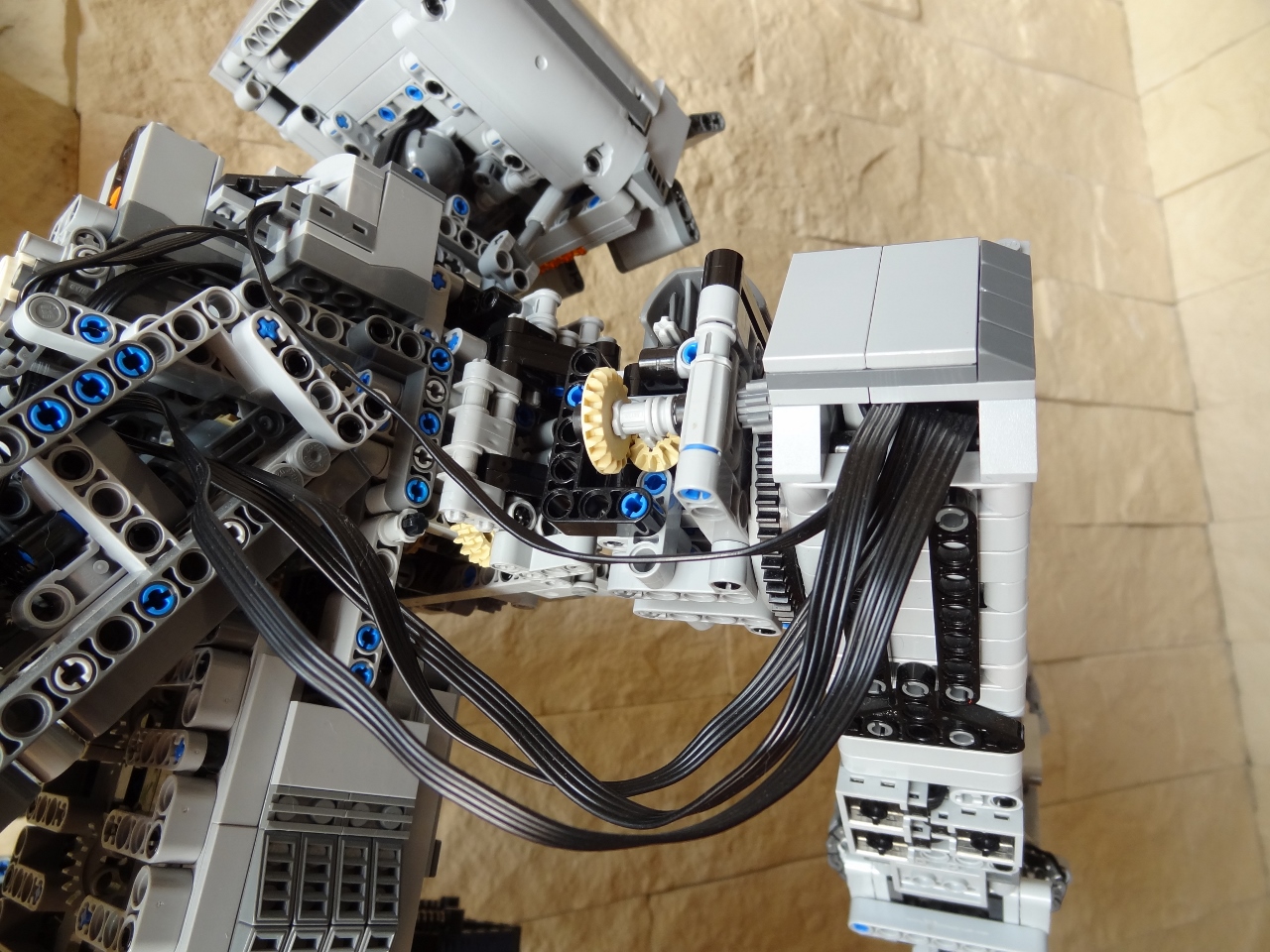
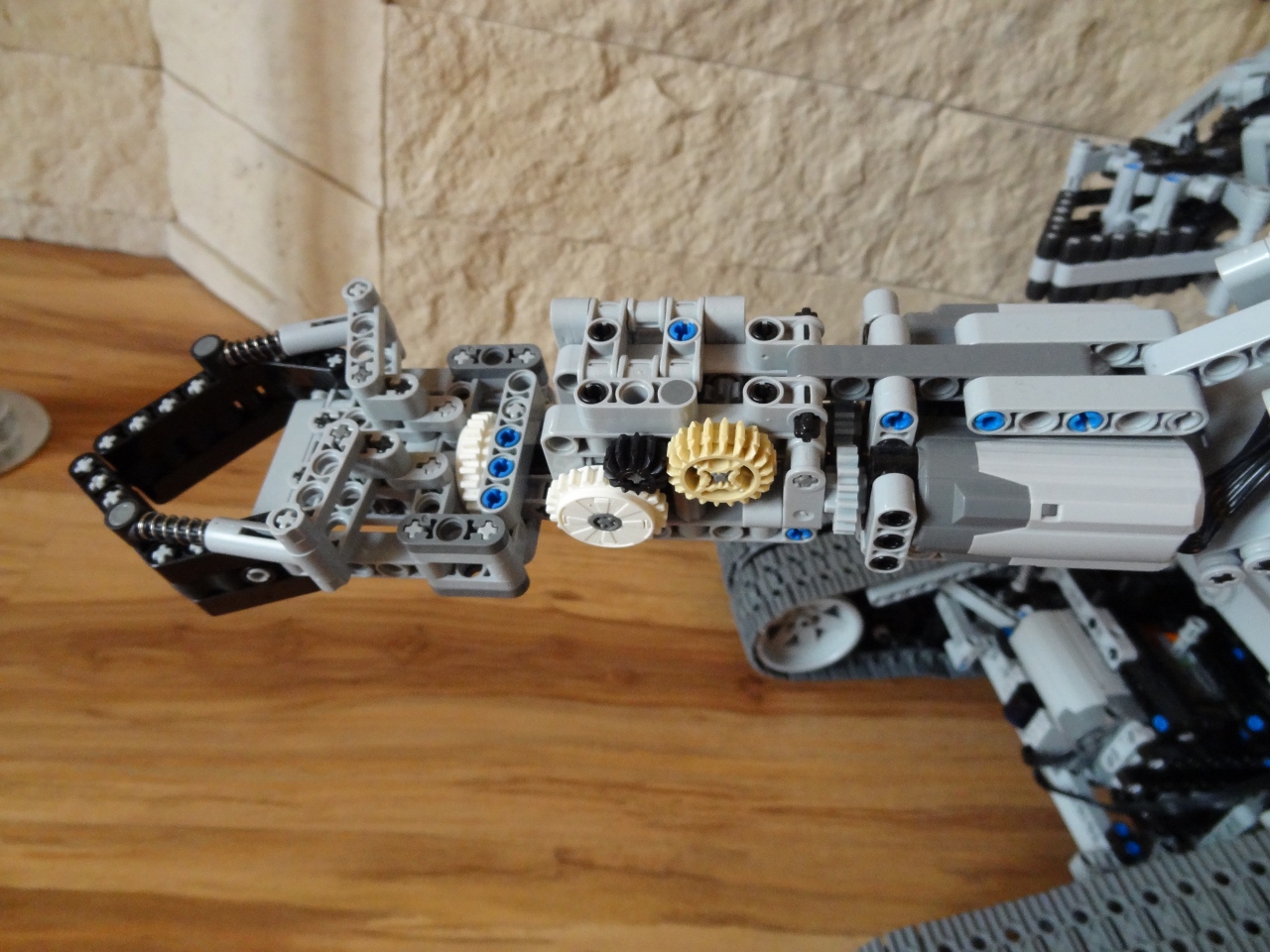
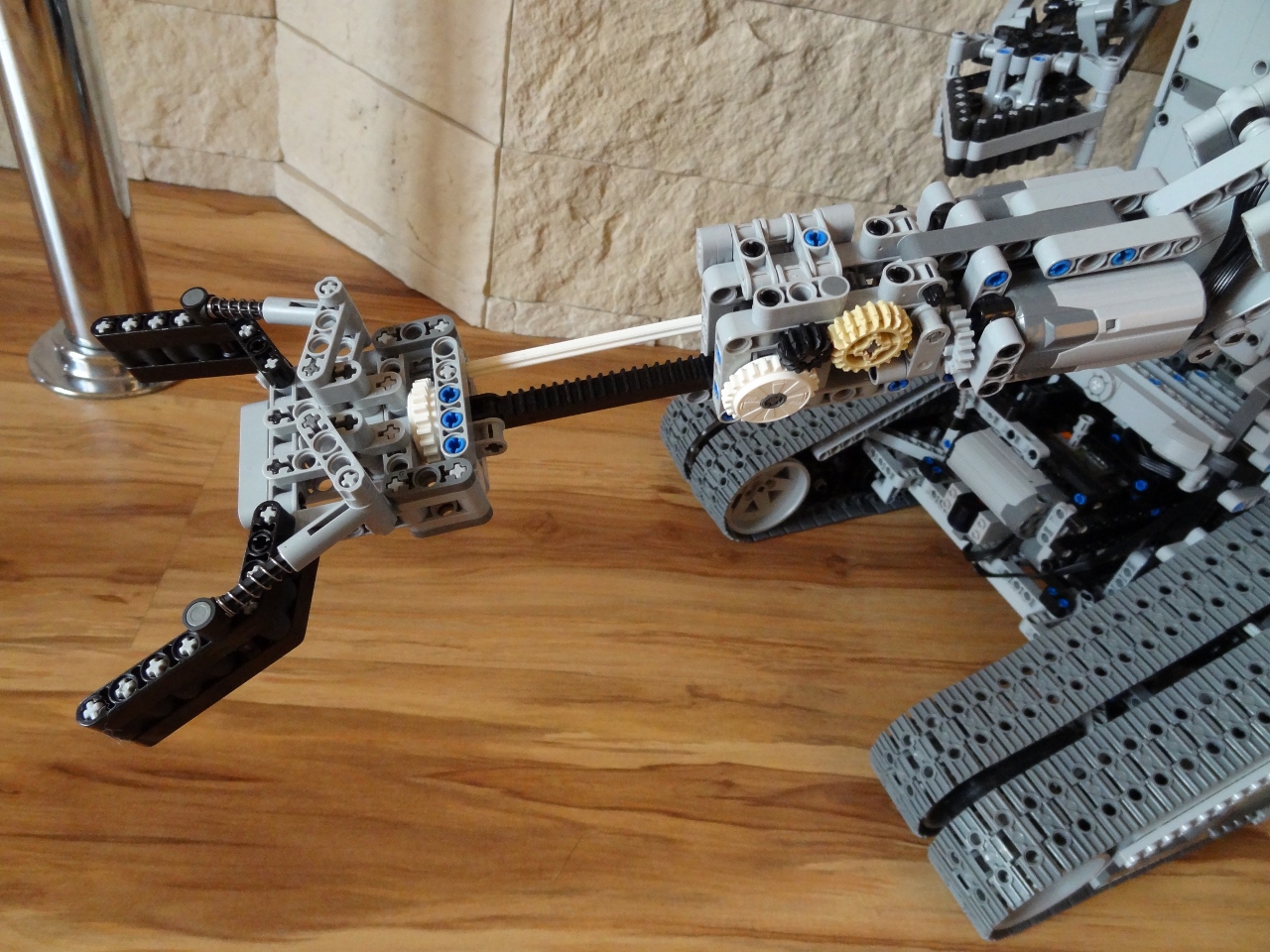
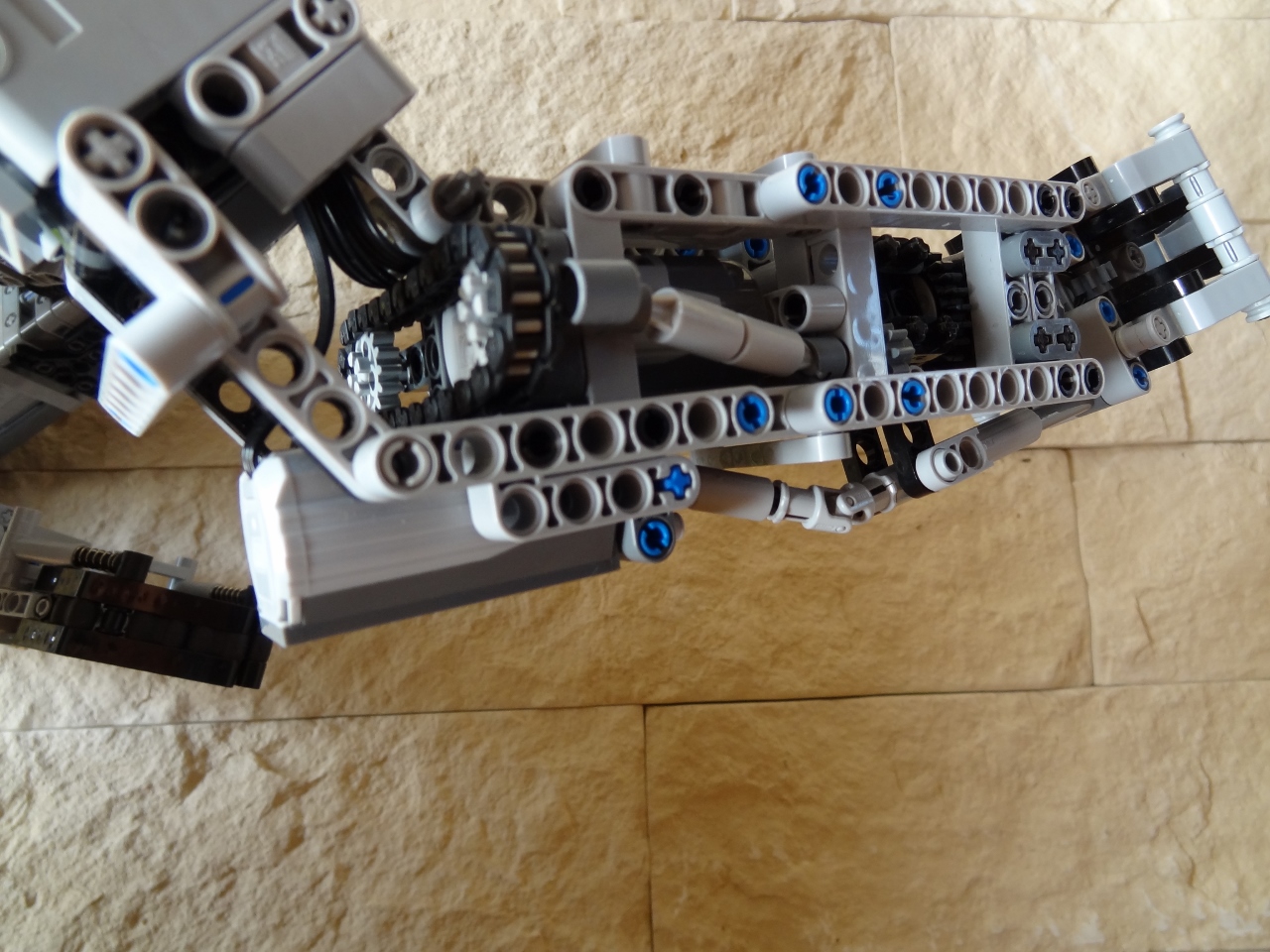
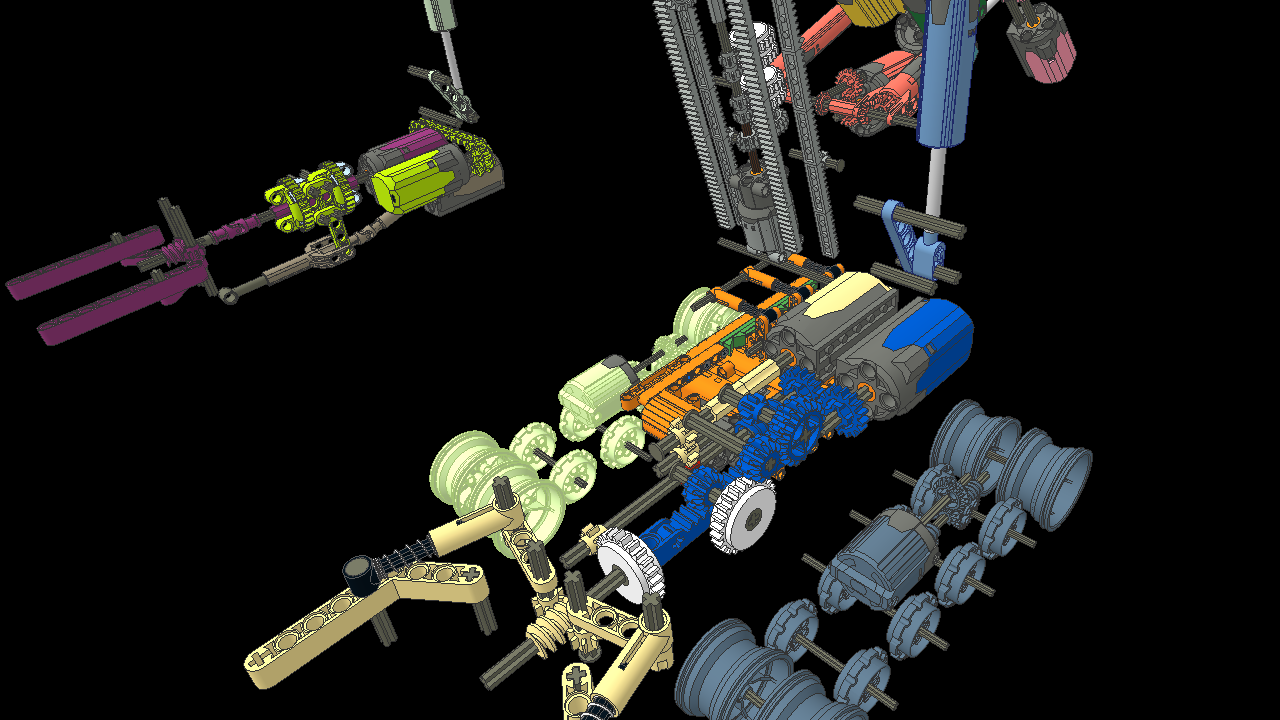
Lewa ręka
W ramieniu znajduje się duży siłownik śrubowy i napędzający go silnik M. Siłownik ten porusza łokciem a dzięki dźwigni ruch ten jest znacznie większy.
W przedramieniu są 2 silniki M i odpowiadają za wysuw nadgarstka oraz za chwytak. Oba te elementy są zabezpieczone sprzęgłem. Wysuw ma długość taką jak są zęby w listwie zębatej (13) a przekazanie napędu na chwytak uzyskałem dzięki nowej czerwonej zębatce z8. Chwytak jest dodatkowo amortyzowany dla lepszego ścisku oraz wyposażony w kilka gumek 2x1.

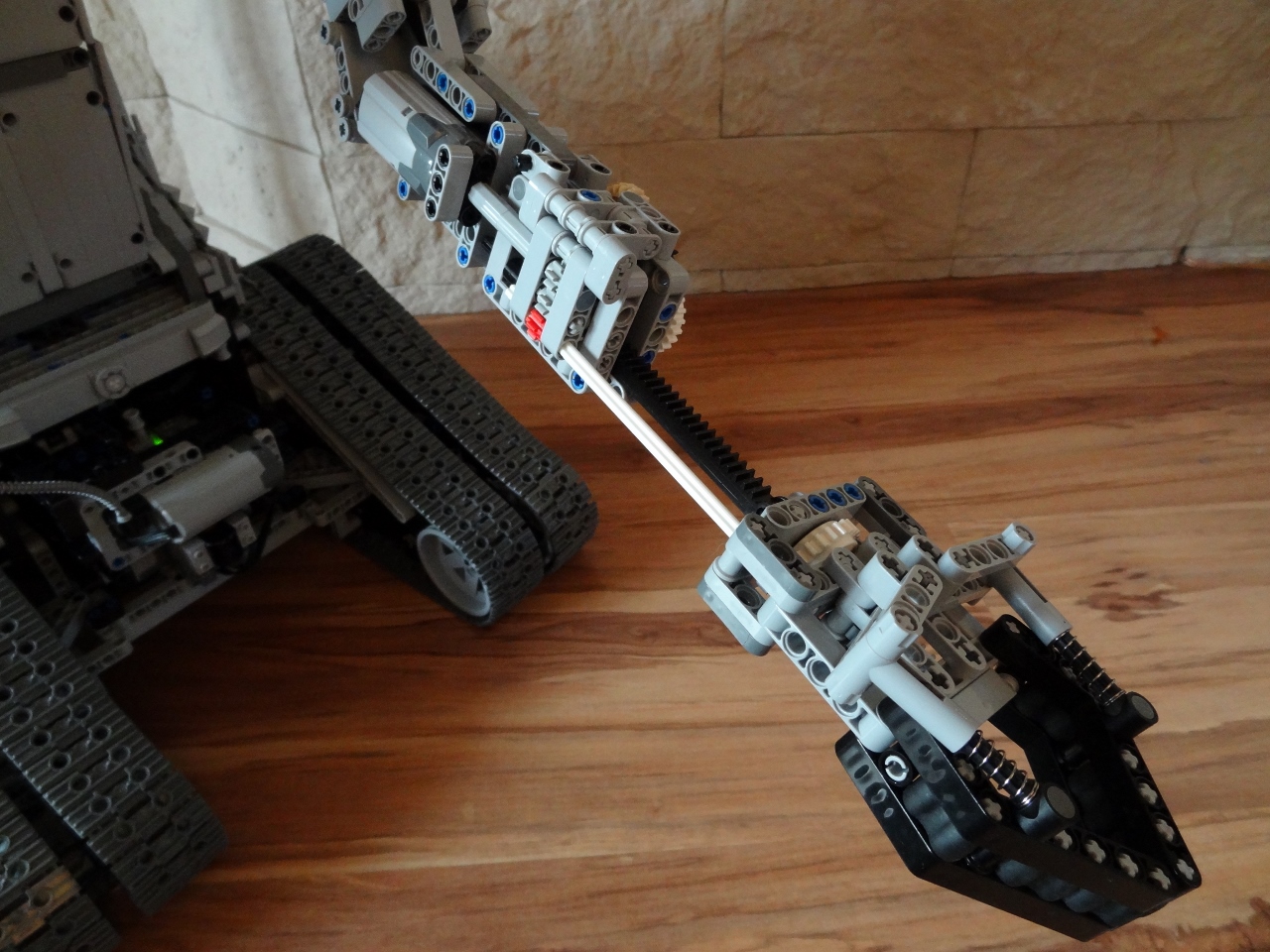
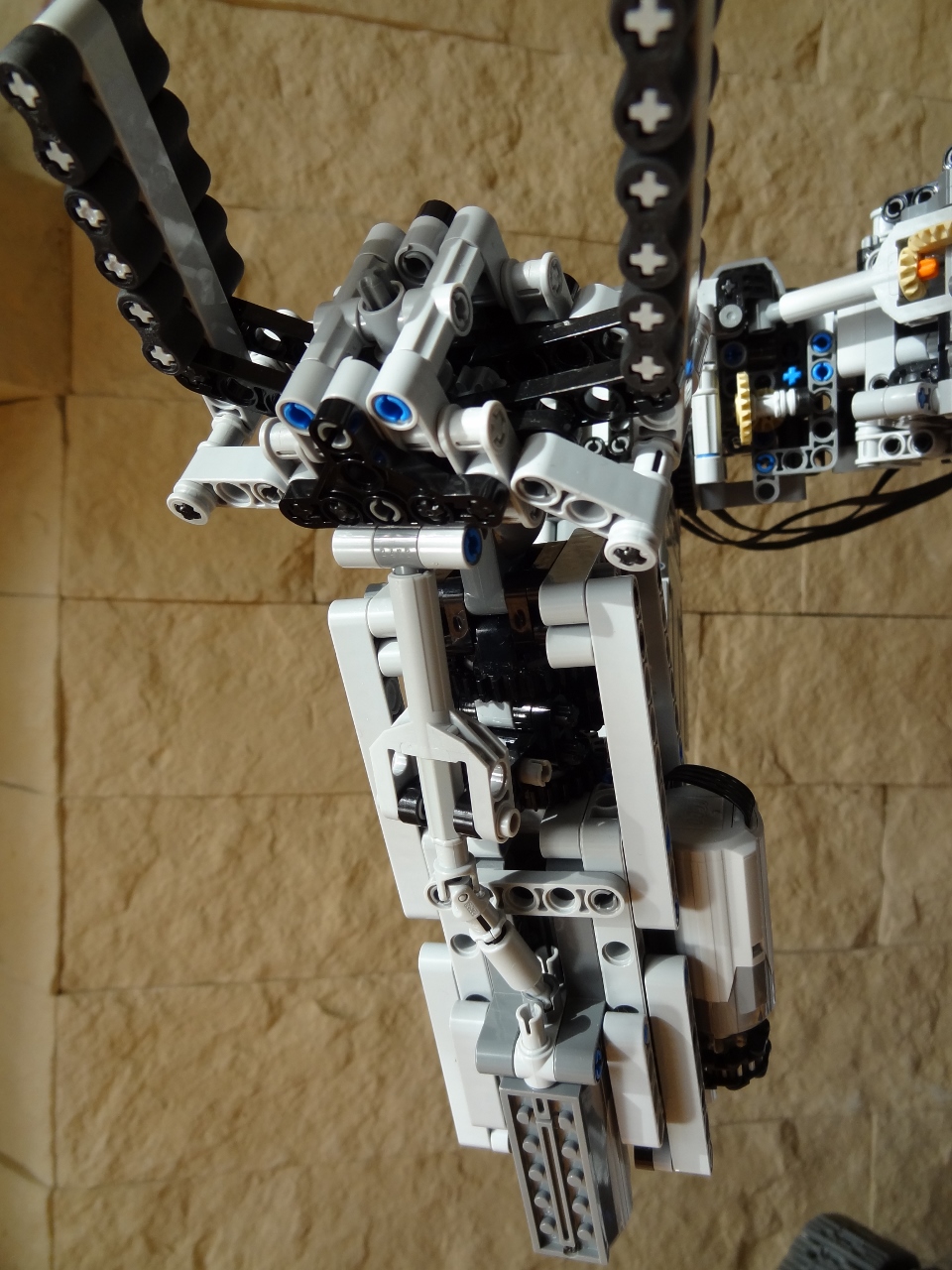
Prawa ręka
Wspominam o niej ponieważ nie jest taka sama jak lewa a dokładniej jej przedramię. Samo ramię jest lustrzanym odbiciem lewego, natomiast przedramię wyposażyłem w trochę inne funkcje. I tak w przedramieniu są aż 3 silniki M. Dwa z nich regulują nadgarstek. W płaszczyźnie "góra-dół" za pomocą małego siłownika śrubowego oraz wokół własnej osi podłużnej dzięki 2 małym obrotnicom. Trzeci silnik odpowiada za chwytak który jest zabezpieczony sprzęgłem liniowym zabudowanym wewnątrz małych obrotnic. Sam chwytak jest również wyposażony w gumki 2x1.


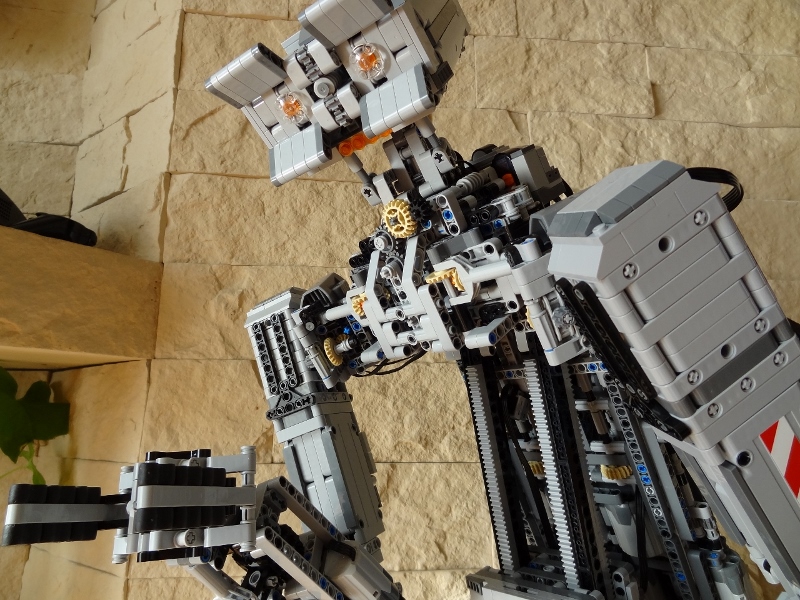
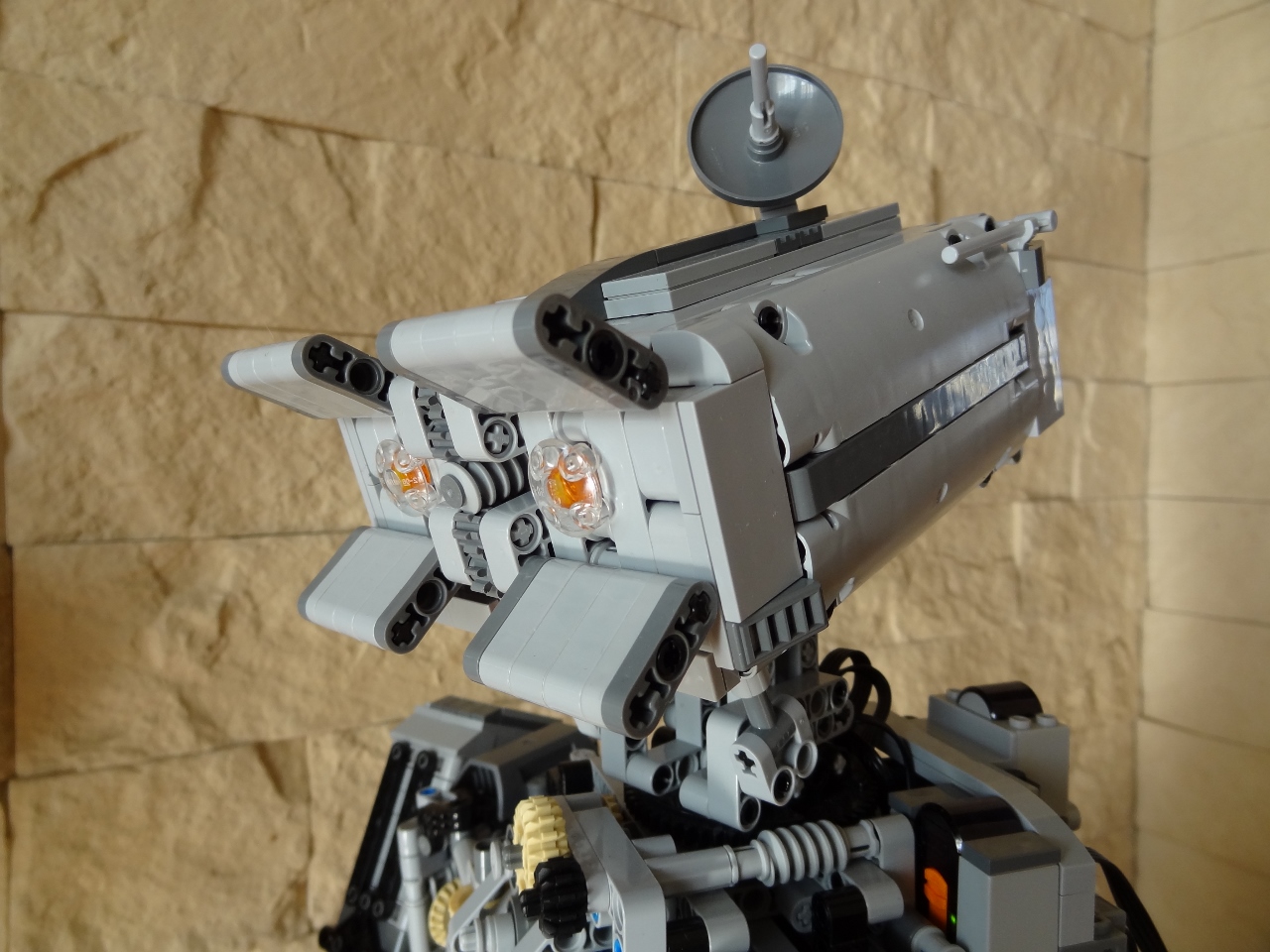
Głowa
Kręcenie głową oraz ruch powiek odbywa się dzięki środkowemu pierścieniowi, natomiast ruchy głową na boki lub góra-dół odbywają się niezależnie dzięki dwóm silnikom M umieszczonym w głowie i napędzających 2 małe siłowniki śrubowe. Dzięki takiemu rozwiązaniu ruchy głową są niemal takie same jak ludzkie.
Broń
Na zakończenie opisu funkcji i taką swoistą kropką nad "i" jest broń robota. Jest to zwyczajna strzałka Lego zaczepiona do podnoszonego wysięgnika umieszczonego na plecach po lewej stronie. Niestety do obsługi broni pozostał mi tylko jeden silnik M więc napędza on mały siłownik śrubowy zabezpieczony dodatkowo sprzęgłem liniowym a strzał następuje automatycznie podczas gdy wysięgnik kończy rozkładanie. Broń jest mechanicznie zabezpieczona przed przypadkowym strzałem tak więc strzał jest możliwy wyłącznie po podniesieniu wysięgnika i to ze zwłoką.
Podsumowanie
Z robota jestem zadowolony. Udało mi się wykorzystać prawie całą posiadaną elektrykę (zostały mi tylko 2 eLki). Na miarę swoich możliwości klockowych ozdobiłem także robota. W niektórych miejscach może brakować wykończenia jednak wolałem dostępne klocki skierować głównie na puste elementy konstrukcyjne niż na zasłanianie zębatek. Na koniec chciałbym powiedzieć by nie traktować mojego robota jako modelu filmowego robota gdyż budowałem z pamięci i na "oko", a przede wszystkim w oparciu o aktualnie posiadane klocki.






To by było na tyle tego długiego opisu. Mimo wszystko starałem się by był konkretny i pełny. Wszystkiego nie napisałem więc jeśli kogoś interesują jakieś konkretne szczegóły to niech pisze. Zapraszam do obejrzenia filmu oraz wyrażenia swojej opinii.
Film
[youtube]http://www.youtube.com/watch?v=pSuGiNQMJwA[/youtube]
Galeria
Więcej MOCy na moim kanale YouTube






