[MOC] Crawler
: 2014-12-11, 11:51
Crawler

Dane techniczne:
Wymiary: dł. 46s / szer. 27s / wys. 33s
Waga: 1.933 kg
Zawieszenie: osie pływające
Napęd: 2 x PF XL z redukcją 7:1
Silniki: 2 x PF XL, 2 x PF M, 2 x PF Servo
Od jakiegoś czasu wiadomo, że wiele opon do modeli RC w standardzie 1.9" pasuje na felgi z Legowego Unimoga. Kupiłem więc sobie takie oto oponki, a ten prosty modelik powstał dla ich przetestowania, razem z regulowanymi amortyzatorami Lego przy okazji.
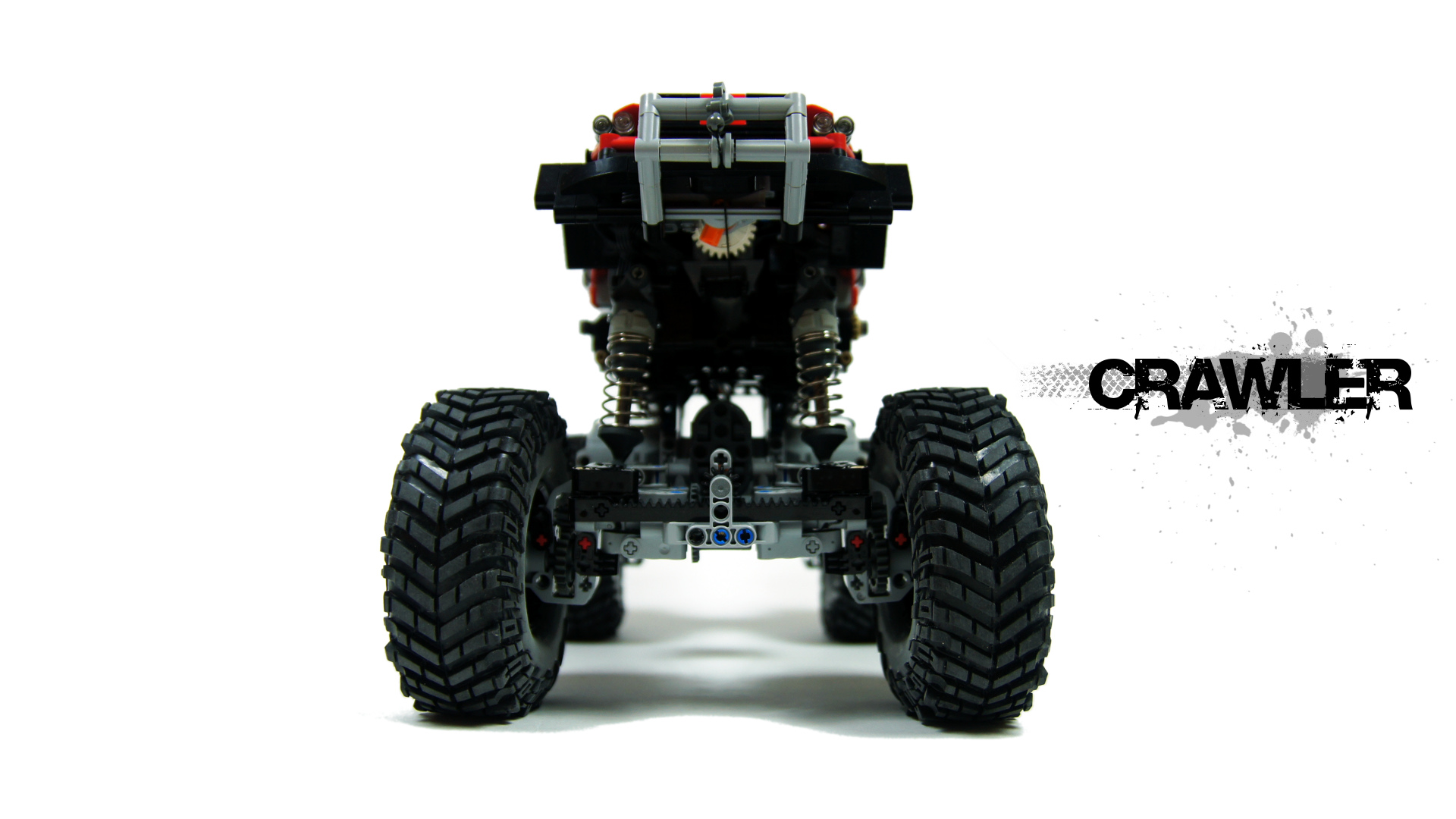
Podwozie jest typowe dla crawlera: dwie identyczne osie pływające, każda na przegubie kulowym, cięgnach 9L i dwóch amorach. Co zabawne, konfiguracja podwozia jest dokładnie odwrotna niż w zestawie 9398: silniki napędowe siedzą pośrodku podwozia, a silniki do skrętu są wmontowane w każdą oś. Oba Serva są sprzężone, z tym że tylne podłączone jest do switcha obsługiwanego przez silnik PF M. Pozwala to zdalnie przełączać między sterowaniem klasycznym a krabowym. Ponieważ switch jest łatwo dostępny - od spodu maski - można też ręcznie go wyłączyć, uzyskując sterowanie tylko na przód, jak w klasycznym samochodzie.
Górne końce amorów przypięte są do dźwigni które utrzymują w pozycji 3 duże LA. Jeden silnik PF M kontroluje je wszystkie, pozwalając na zmianę prześwitu. Zmiana nie jest duża, w granicach 3-4 studów, a cały mechanizm podwyższa podwozie, dając tak naprawdę wybór między wysoko/bardzo wysoko. Można z powodzeniem uznać, że jest to skórka niewarta wyprawki - bez tego bajeru model byłby niższy.
Buda rodziła się w bólach - z początku marzyła mi się karoseria klasycznego Garbusa, bo się naoglądałem zwiastunów nowego Mad Maxa. Potem przyszło spostrzeżenie że wszystkie Technicowe Garbusy są brzydkie jak siedem nieszczęść, a za nim próba posadzenia na podwoziu budy Mini Coopera 10242. Posadzić się dało, efekt wyglądał bombowo, niestety takie połączenie okazało się bardzo wysokie i tak chybotliwe że zawieszenie nie było w stanie utrzymać budy poziomo. Koniec końców stanęło na prostej budzie z paneli w stylistyce a'la klasyczny pickup. Nie ma tu absolutnie nic ciekawego, nawet przednia wyciągarka jest tylko atrapą.
Odpowiadając na pytania jak radzą sobie opony: świetnie. Przyczepność wciąga wszystkie opony Lego nosem, do tego są dość miękkie żeby dopasowywać się do przeszkód, ale bez przesady. Nieco odkształcają się podczas jazdy, widać że felga nie trzyma ich idealnie, ale dzięki wypełnieniu ich pianką ani razu nie zdarzyło się żeby felga kręciła się w oponie. Amory również sprawdziły się fajnie, choć pracowałyby lepiej pod cięższą budą. Różnica w ich ustawieniach miękkie/twarde jest naprawdę uderzająca, szkoda tylko że nie ma żadnego ustawienia pośredniego. Nawet umieszczenie odbiorników nietypowo, bo w bokach karoserii, sprawdziło się całkiem dobrze - mogłem spokojnie stać obok modelu i sterować nim w terenie zamiast za nim truchtać.
Dwa główne felery jeśli chodzi o zdolności terenowe to dyfry, których nie śmiałem uniknąć przy tak wielkich kołach i tak ciasnym promieniu skrętu. Na filmie widać jak zachowują się koła w skręcie - różnica w ich prędkościach jest wielka, i gdyby dyfrów nie było to nie nadążyłbym wymieniać ukręconych kardanów. Drugi feler to zasilanie - przy dużym obciążeniu odbiornik V2 czasem odcinał na chwilę XLe. Chociaż nie zauważyłem żeby działo się to na zewnątrz, przy temperaturze -3. Przy okazji ładnie sprawdziły się aku od Eneloopa - Crawler pomykał w mrozie równie sprawnie co w mieszkaniu, podczas kiedy na przykład bateria w mojej lustrzance po paru minutach odmówiła współpracy i wróciła do życia dopiero w domu.
Ogólnie model szału nie robi, nie jest ani piękny ani innowacyjny. Jestem jednak zadowolony że nie zawiódł ani razu, w żadnych warunkach - zero awarii, wszystko działało jak powinno. Co więcej, jak dotąd nie znalazłem w nim żadnych uszkodzonych części, a to była moja główna obawa przy oponach średnicy 16 kropek.
Film: https://www.youtube.com/watch?v=SgpnJTqsNvk
Galeria: http://www.brickshelf.com/cgi-bin/gallery.cgi?f=550665
I parę fotek:










Dane techniczne:
Wymiary: dł. 46s / szer. 27s / wys. 33s
Waga: 1.933 kg
Zawieszenie: osie pływające
Napęd: 2 x PF XL z redukcją 7:1
Silniki: 2 x PF XL, 2 x PF M, 2 x PF Servo
Od jakiegoś czasu wiadomo, że wiele opon do modeli RC w standardzie 1.9" pasuje na felgi z Legowego Unimoga. Kupiłem więc sobie takie oto oponki, a ten prosty modelik powstał dla ich przetestowania, razem z regulowanymi amortyzatorami Lego przy okazji.
Podwozie jest typowe dla crawlera: dwie identyczne osie pływające, każda na przegubie kulowym, cięgnach 9L i dwóch amorach. Co zabawne, konfiguracja podwozia jest dokładnie odwrotna niż w zestawie 9398: silniki napędowe siedzą pośrodku podwozia, a silniki do skrętu są wmontowane w każdą oś. Oba Serva są sprzężone, z tym że tylne podłączone jest do switcha obsługiwanego przez silnik PF M. Pozwala to zdalnie przełączać między sterowaniem klasycznym a krabowym. Ponieważ switch jest łatwo dostępny - od spodu maski - można też ręcznie go wyłączyć, uzyskując sterowanie tylko na przód, jak w klasycznym samochodzie.
Górne końce amorów przypięte są do dźwigni które utrzymują w pozycji 3 duże LA. Jeden silnik PF M kontroluje je wszystkie, pozwalając na zmianę prześwitu. Zmiana nie jest duża, w granicach 3-4 studów, a cały mechanizm podwyższa podwozie, dając tak naprawdę wybór między wysoko/bardzo wysoko. Można z powodzeniem uznać, że jest to skórka niewarta wyprawki - bez tego bajeru model byłby niższy.
Buda rodziła się w bólach - z początku marzyła mi się karoseria klasycznego Garbusa, bo się naoglądałem zwiastunów nowego Mad Maxa. Potem przyszło spostrzeżenie że wszystkie Technicowe Garbusy są brzydkie jak siedem nieszczęść, a za nim próba posadzenia na podwoziu budy Mini Coopera 10242. Posadzić się dało, efekt wyglądał bombowo, niestety takie połączenie okazało się bardzo wysokie i tak chybotliwe że zawieszenie nie było w stanie utrzymać budy poziomo. Koniec końców stanęło na prostej budzie z paneli w stylistyce a'la klasyczny pickup. Nie ma tu absolutnie nic ciekawego, nawet przednia wyciągarka jest tylko atrapą.
Odpowiadając na pytania jak radzą sobie opony: świetnie. Przyczepność wciąga wszystkie opony Lego nosem, do tego są dość miękkie żeby dopasowywać się do przeszkód, ale bez przesady. Nieco odkształcają się podczas jazdy, widać że felga nie trzyma ich idealnie, ale dzięki wypełnieniu ich pianką ani razu nie zdarzyło się żeby felga kręciła się w oponie. Amory również sprawdziły się fajnie, choć pracowałyby lepiej pod cięższą budą. Różnica w ich ustawieniach miękkie/twarde jest naprawdę uderzająca, szkoda tylko że nie ma żadnego ustawienia pośredniego. Nawet umieszczenie odbiorników nietypowo, bo w bokach karoserii, sprawdziło się całkiem dobrze - mogłem spokojnie stać obok modelu i sterować nim w terenie zamiast za nim truchtać.
Dwa główne felery jeśli chodzi o zdolności terenowe to dyfry, których nie śmiałem uniknąć przy tak wielkich kołach i tak ciasnym promieniu skrętu. Na filmie widać jak zachowują się koła w skręcie - różnica w ich prędkościach jest wielka, i gdyby dyfrów nie było to nie nadążyłbym wymieniać ukręconych kardanów. Drugi feler to zasilanie - przy dużym obciążeniu odbiornik V2 czasem odcinał na chwilę XLe. Chociaż nie zauważyłem żeby działo się to na zewnątrz, przy temperaturze -3. Przy okazji ładnie sprawdziły się aku od Eneloopa - Crawler pomykał w mrozie równie sprawnie co w mieszkaniu, podczas kiedy na przykład bateria w mojej lustrzance po paru minutach odmówiła współpracy i wróciła do życia dopiero w domu.
Ogólnie model szału nie robi, nie jest ani piękny ani innowacyjny. Jestem jednak zadowolony że nie zawiódł ani razu, w żadnych warunkach - zero awarii, wszystko działało jak powinno. Co więcej, jak dotąd nie znalazłem w nim żadnych uszkodzonych części, a to była moja główna obawa przy oponach średnicy 16 kropek.
Film: https://www.youtube.com/watch?v=SgpnJTqsNvk
Galeria: http://www.brickshelf.com/cgi-bin/gallery.cgi?f=550665
I parę fotek: