No ale to gąsienice hałasują po podłodze czy zębatki strzelają?noniusz pisze:Odgłosy jazdy nie da się ukryć - słychać.
[WIP] E-crane
Moderatorzy: Mod Team, Mod Team
-
Żbik

- Administrator
- Posty: 2960
- Rejestracja: 2006-06-06, 15:34
- Lokalizacja: Gdynia
- brickshelf: Zbiczasty
-


"As nigdy nie odmawia w słusznej sprawie!" 
ABC prezentacji MOCy | Zamienniki wężyków pneumatycznych | Sklepik z gadżetami klubowymi
ABC prezentacji MOCy | Zamienniki wężyków pneumatycznych | Sklepik z gadżetami klubowymi
-
noniusz

- VIP
- Posty: 1073
- Rejestracja: 2011-11-23, 21:02
- Lokalizacja: Poznań
- brickshelf: gkurkowski
- Kontakt:
-
Dla spokojności przejechałem się po dywanie i hałas zdecydowanie nie pochodzi od strzelających zębatek :)Żbik pisze:No ale to gąsienice hałasują po podłodze czy zębatki strzelają?
Film kręciłem na podłodze / panelach podłogowych i pod tego typu podłoże funkcja jazdy jest przygotowana, na dywanie ciężko wykonać manewr skrętu...
2 duże pompki to aż nadto, ile potrzebuję powietrza, poza tym 2 pompki ułożone w 1 linii to ok. 20 studów, czyli zapotrzebowanie na dość sporo wolnego miejsca, ale gdyby patrzeć z punktu widzenia oddziaływania sił sprężyn to Twój pomysł miałby jak najbardziej sens.BJ pisze:Ale jakbyś ustawił dwie duże pompki naprzeciw siebie? Wtedy sprężyny w dużym stopniu zmniejszyły siłę potrzebną do napędzania wału korbowego.
Po obejrzeniu filmu mam wrażenie, że gąsienice są bardzo napięte. Próbowałeś je nieco poluzować? Poruszają się bardzo skokowo.
Dwie duże pompki to faktycznie sporo miejsca, ale można kombinować z np. kompresorem w stylu kołyskowego który pokazywał Sariel dla małych pompek.
Dwie duże pompki to faktycznie sporo miejsca, ale można kombinować z np. kompresorem w stylu kołyskowego który pokazywał Sariel dla małych pompek.
(19:28:58) Toltomeja: teraz powiem absolutnie serio, nawet jeśli zaraz będę żałował: trialowki wygrywają ten pojedynek
-
noniusz
- VIP
- Posty: 1073
- Rejestracja: 2011-11-23, 21:02
- Lokalizacja: Poznań
- brickshelf: gkurkowski
- Kontakt:
-
Witam ponownie.
Posiedziałem trochę z budulcem i zgodnie z wcześniejszą zapowiedzią wprowadziłem kilka zmian w modelu.
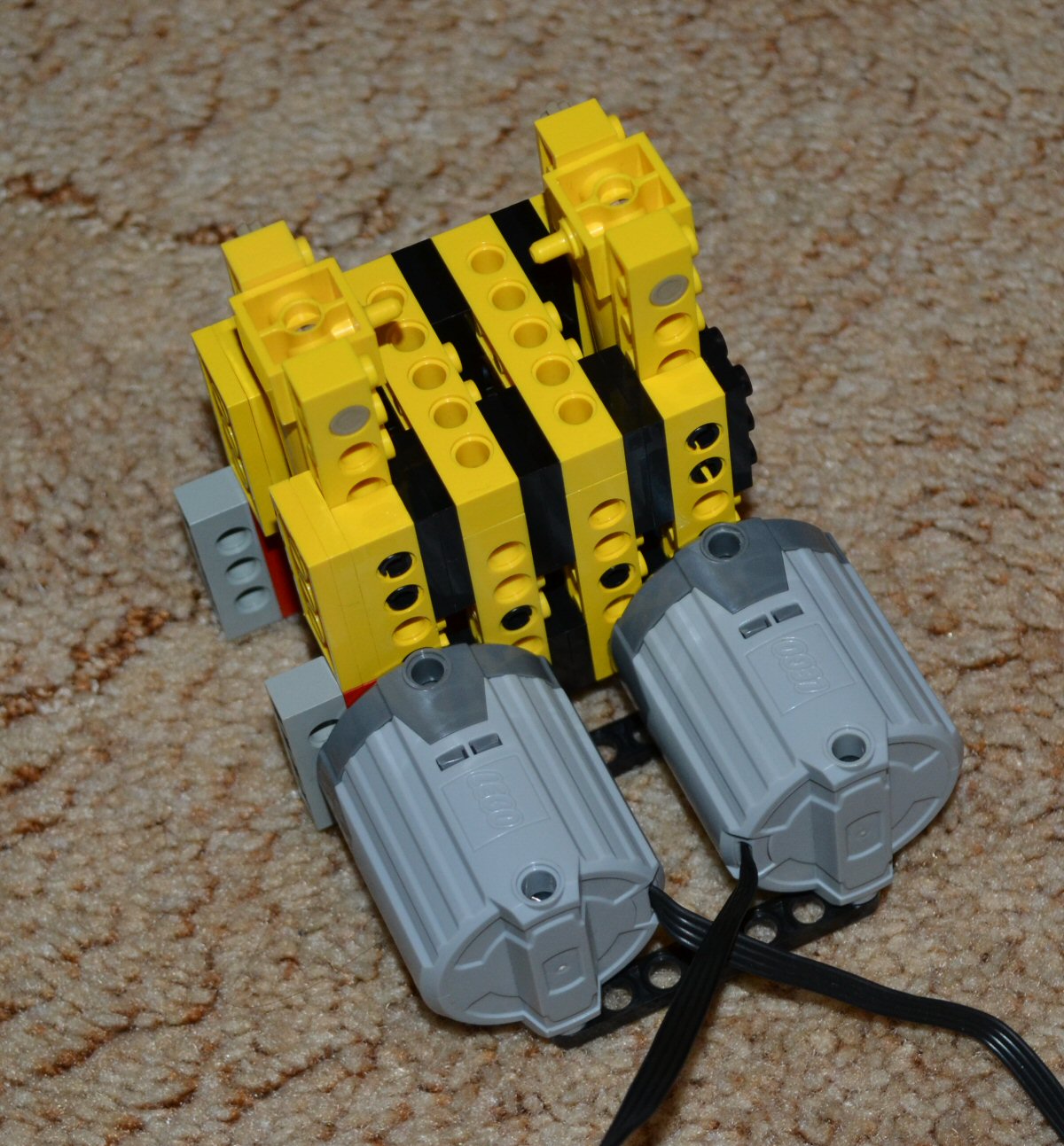
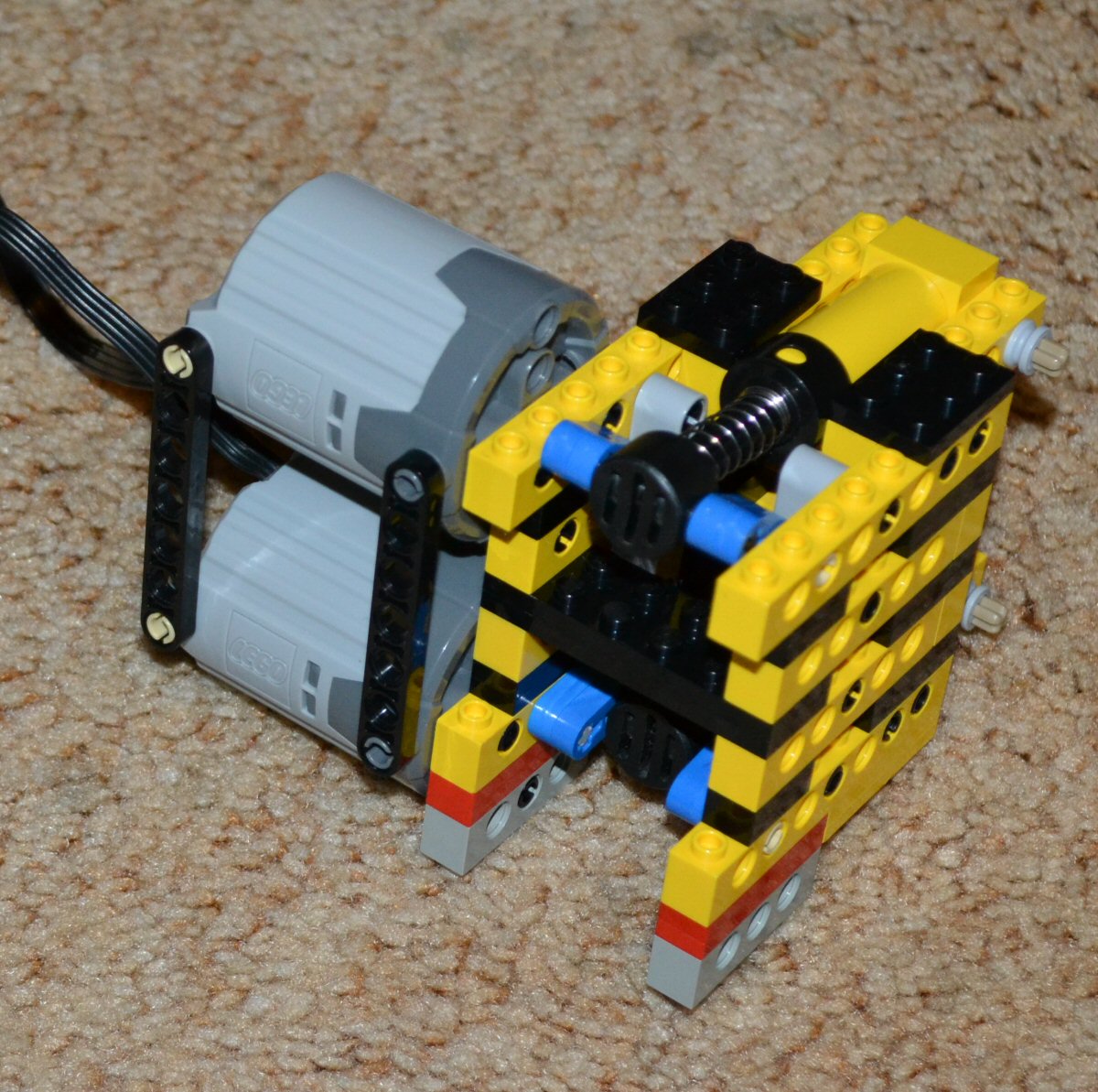
Przede wszystkim przebudowałem układ pneumatyczny i w tej chwili za zasilanie układu pneumatycznego odpowiadają 2 duże pompki + 2 silniki XL, po 1 pompce i 1 silniku na funkcję podnoszenia ramienia boom i stick.
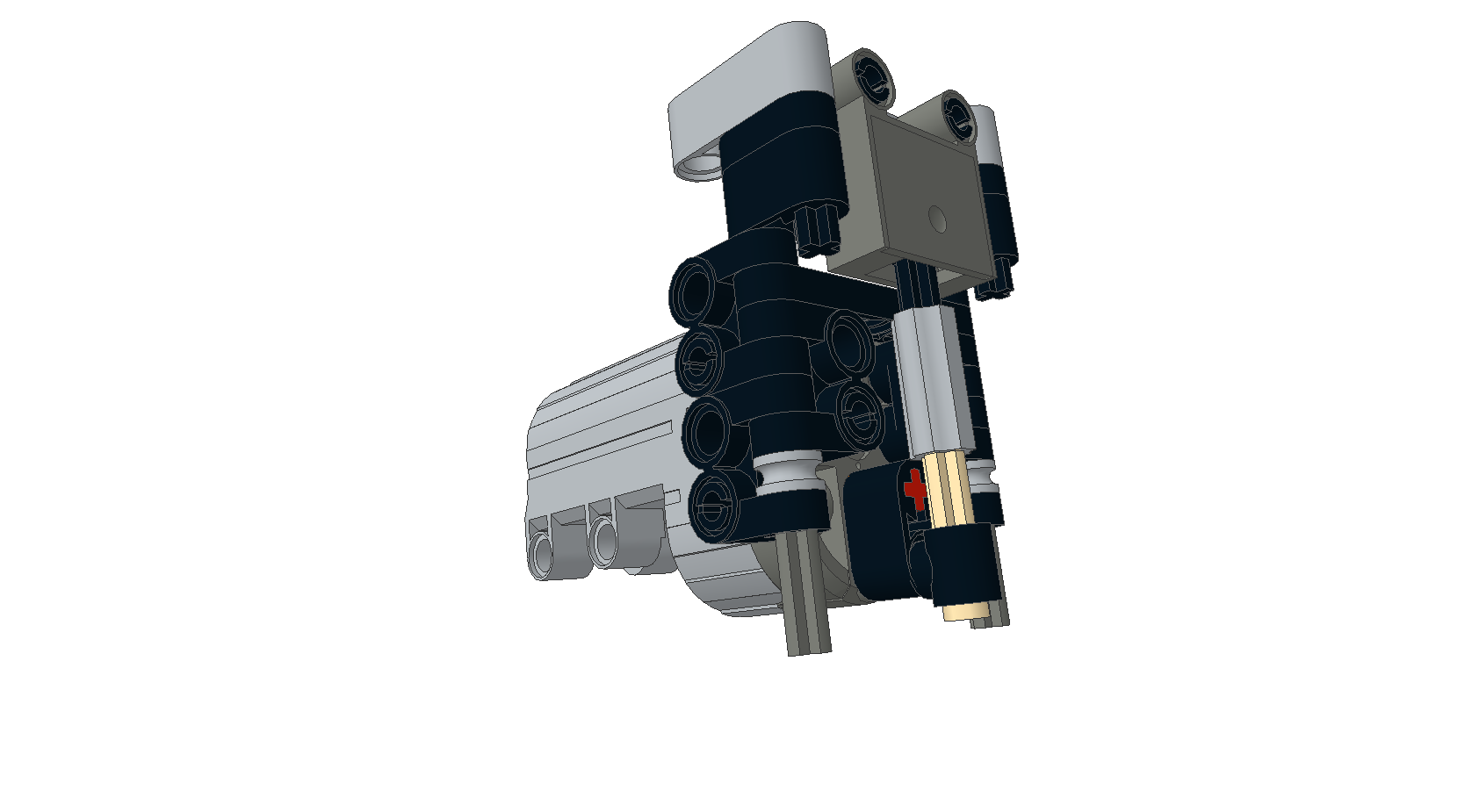
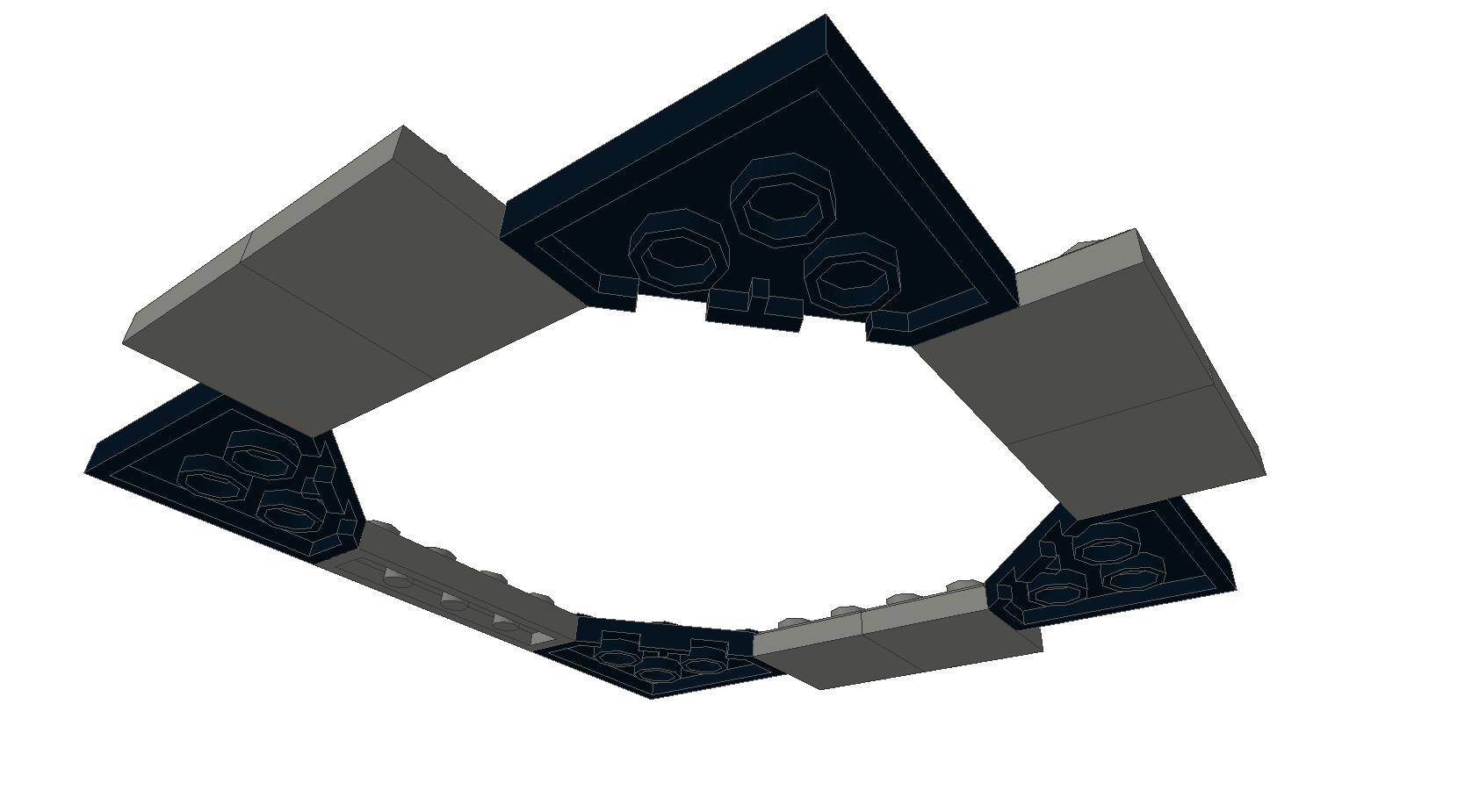
Wcześniej zespół kompresorów wyglądał tak:

Teraz wygląda tak:


Niestety taki zespół kompresorów zajmuje więcej miejsca niż jego poprzednik, dlatego zmuszony byłem szukać gdzieś indziej oszczędności.
Wcześnniej zapowiadałem, że:







Nie zamierzam oczywiście doszukiwać się wyższości jednego rozwiązania nad drugim, natomiast to co udało mi się osiągnąć to:
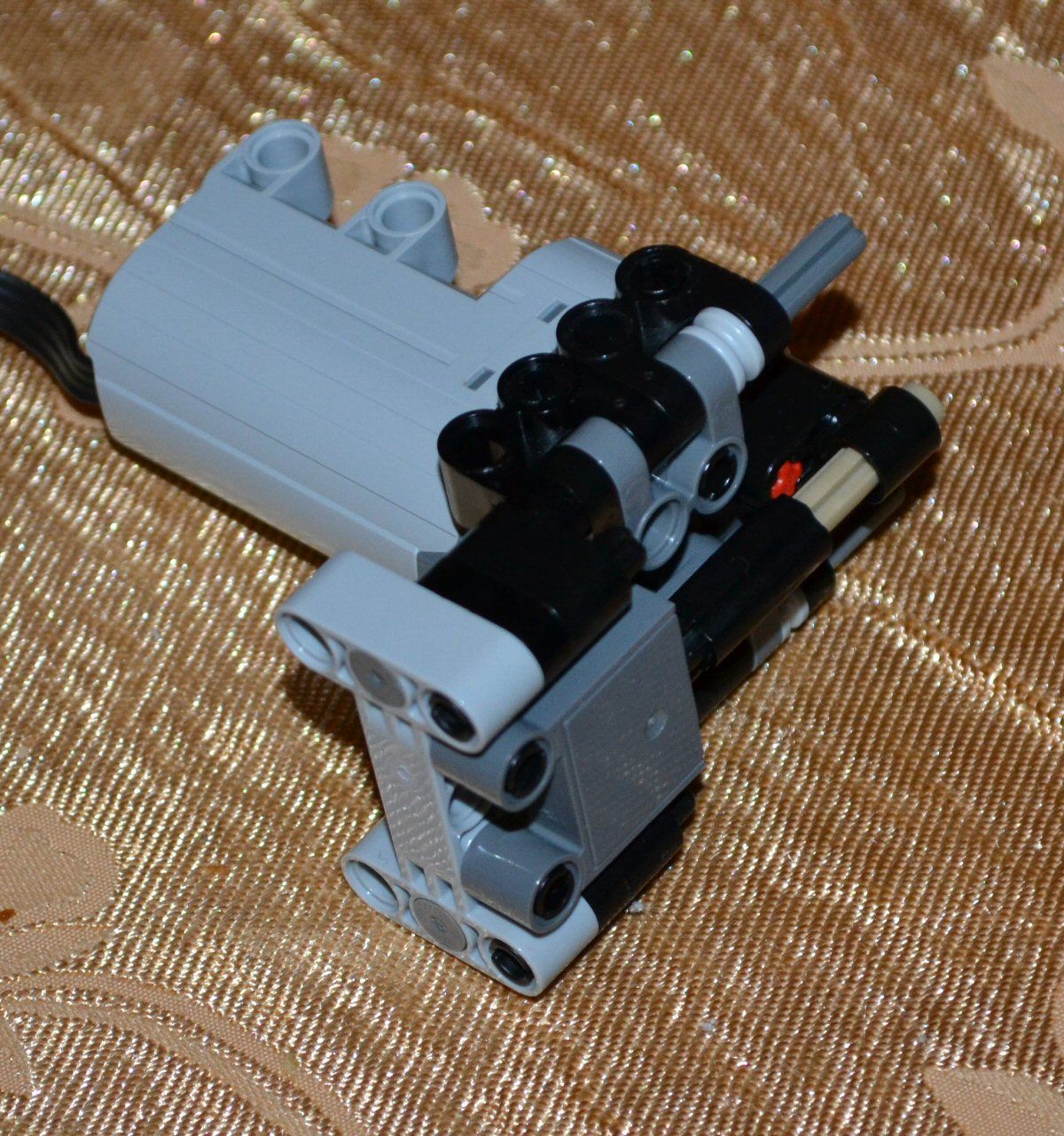
- skrócenie zaworu o 3 study (u Żbika jest 12 studów, u mnie 9)
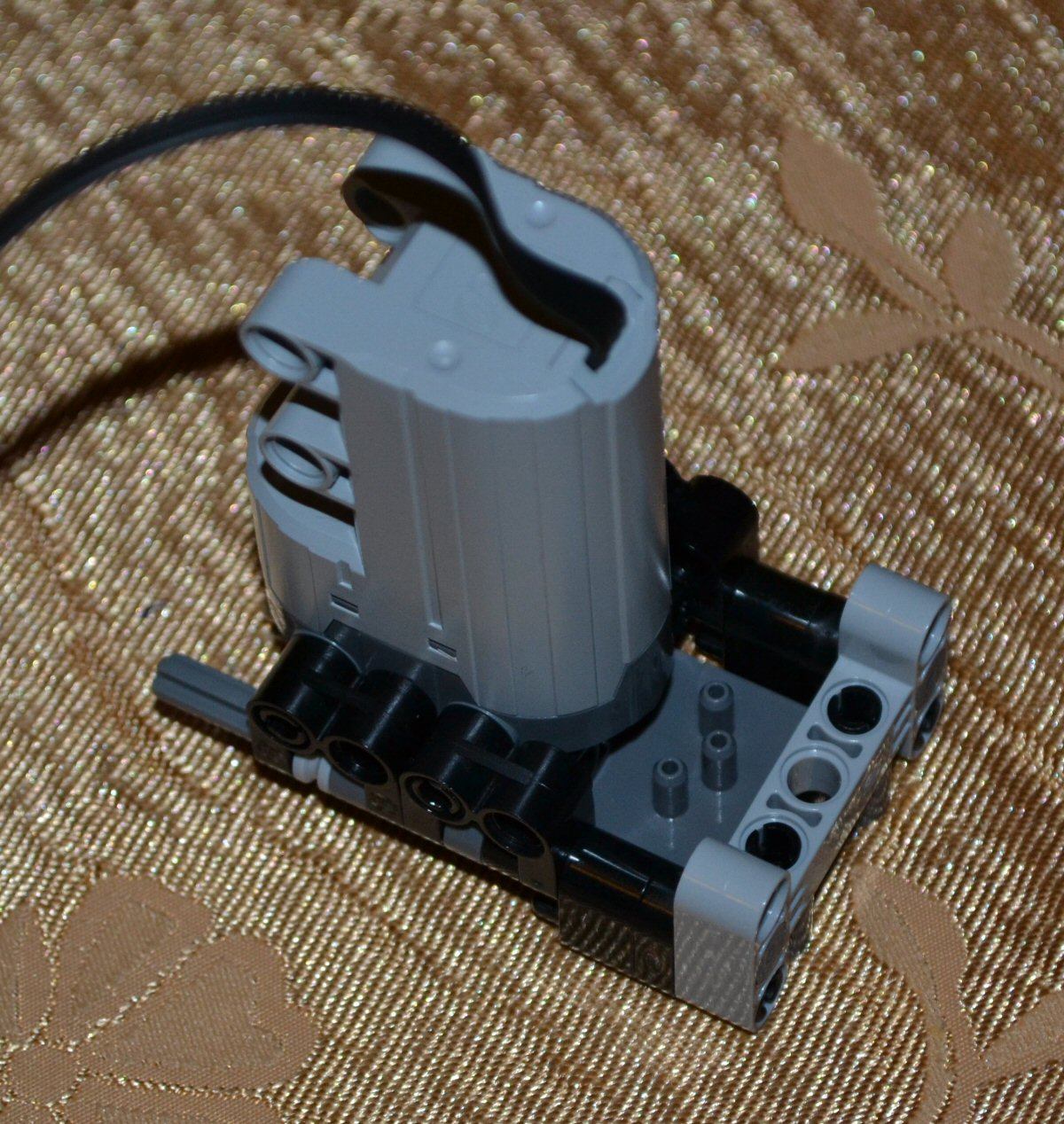
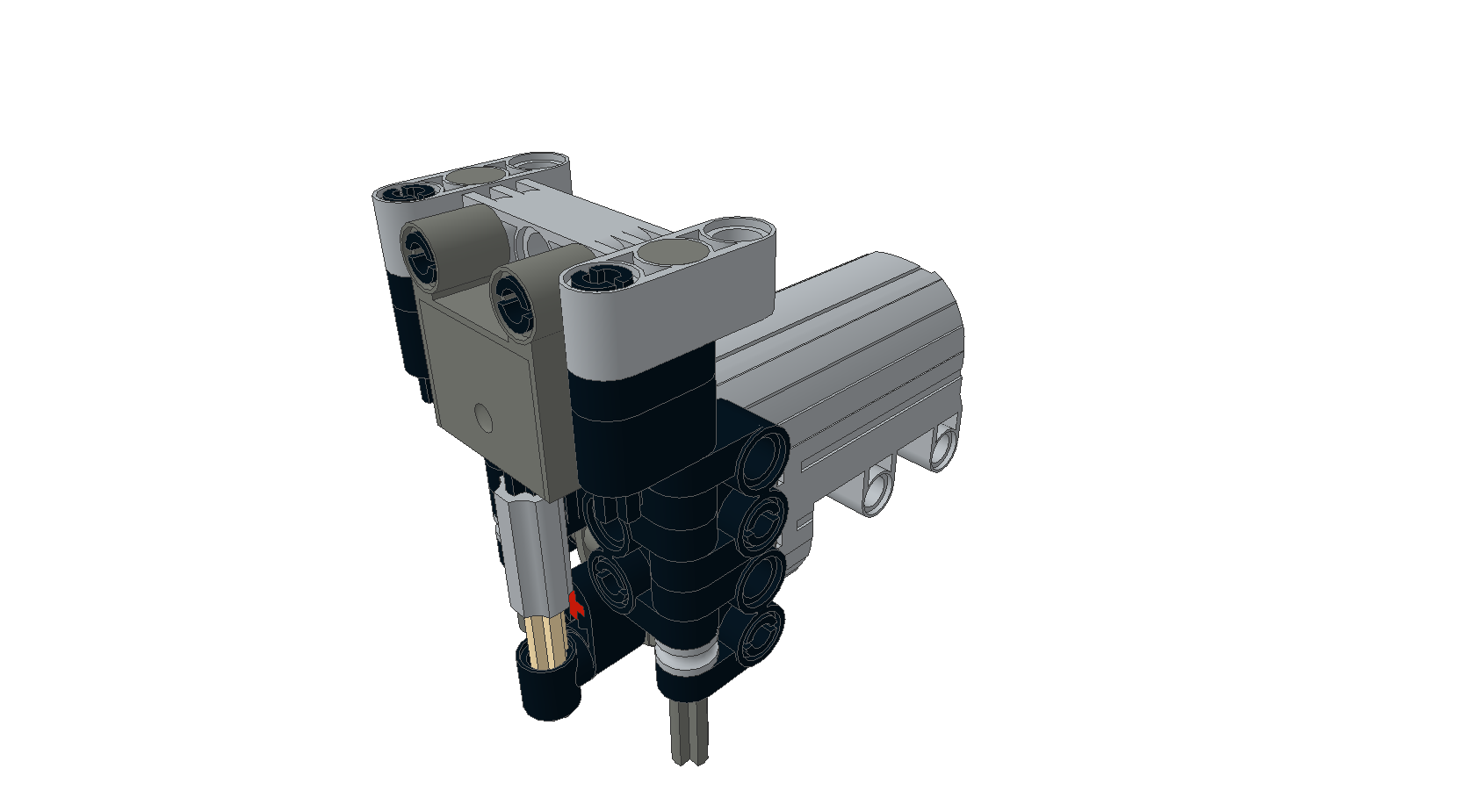
- w mojej konstrukcji można obrócić zawór o 180 st. dzięki czemu wejścia/wyjścia wężyków można skierować w pożądanym kierunku, o tak:

Zawory działają poprawnie, wychylenie dźwigienki zaworu jest w dolnym zakresie minimum, przy którym zawór zaczyna przepuszczać powietrze.
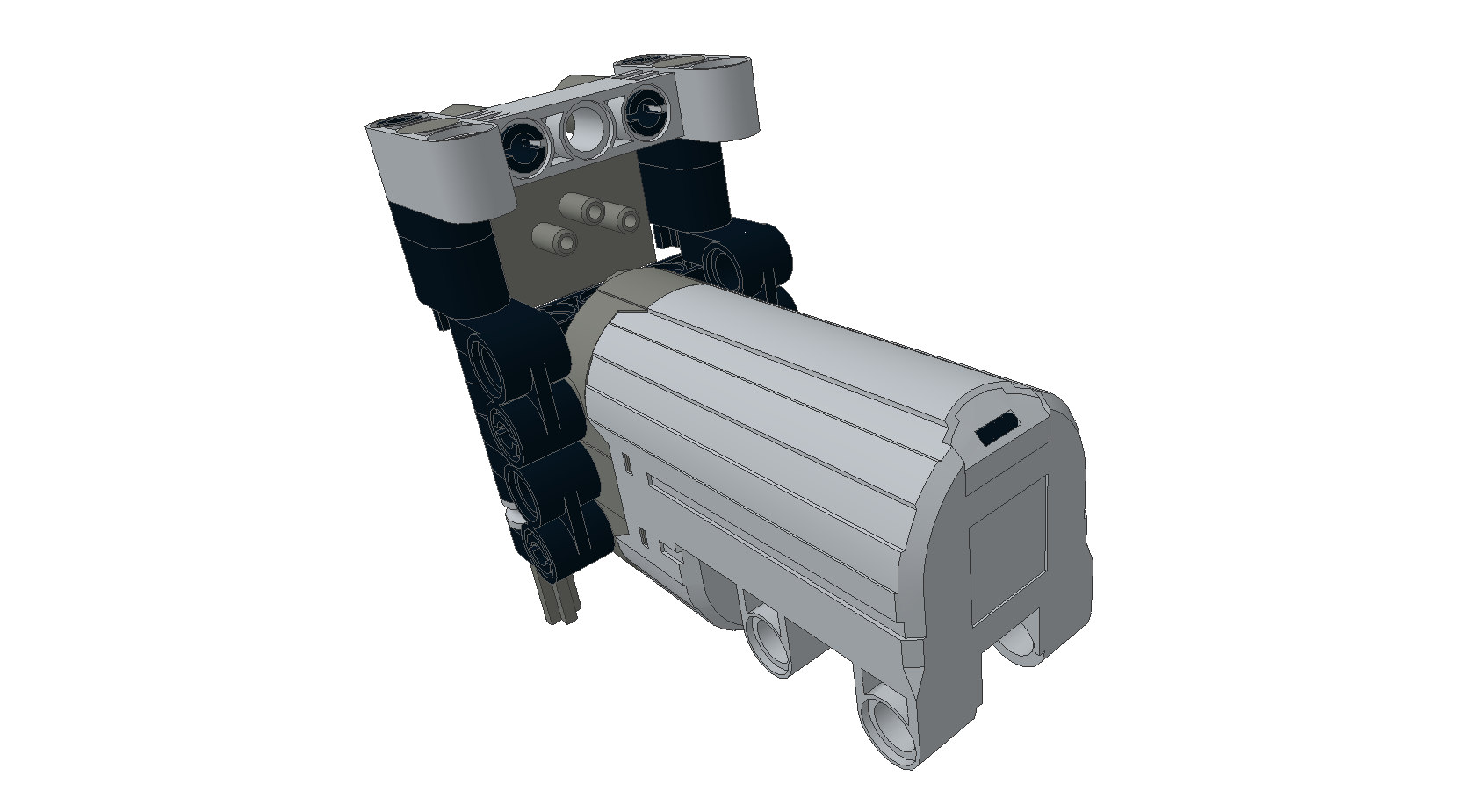
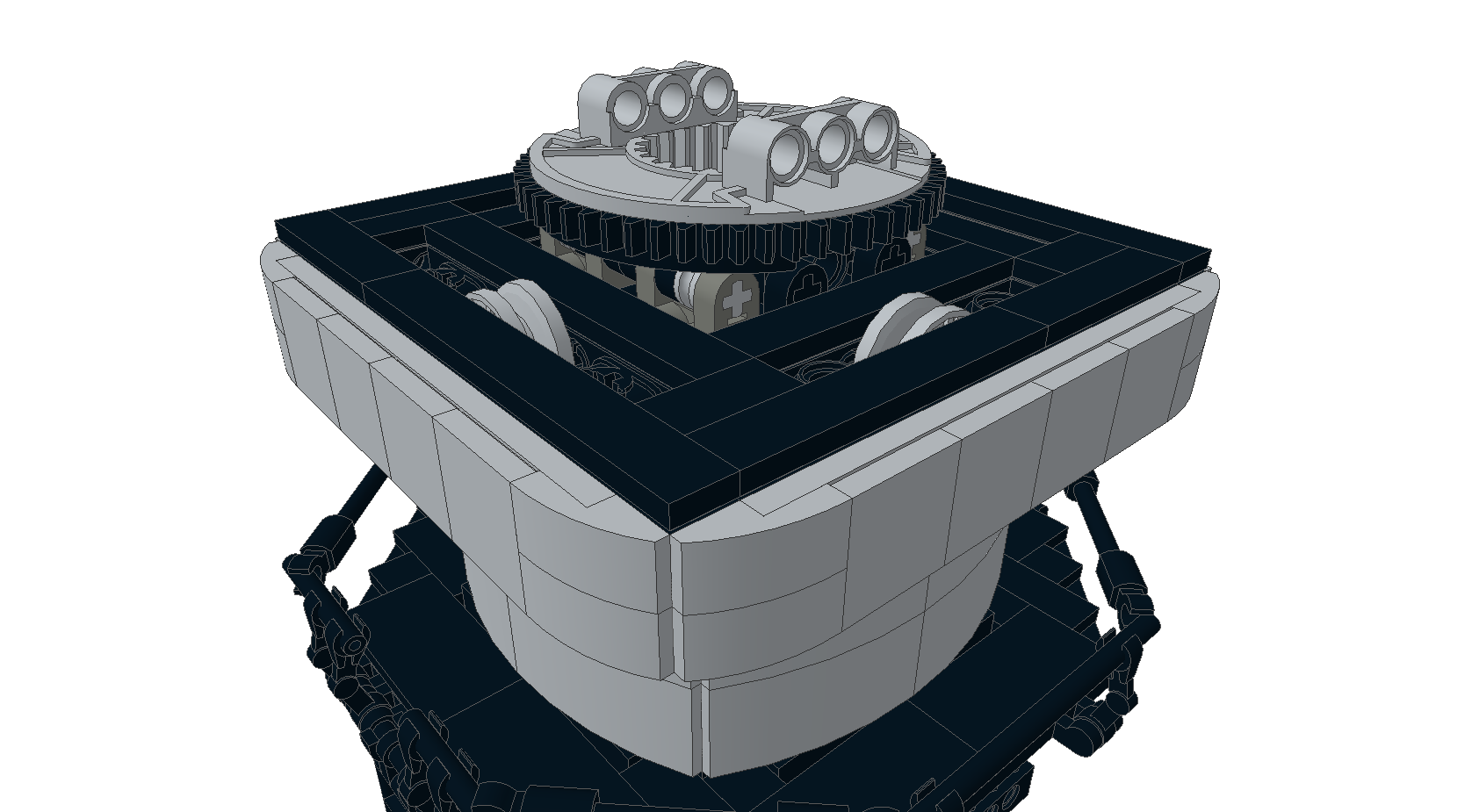
Tak powstały kompresor i zawory trafiły do power-packa, i wszystko udało się ładnie upchnąć:



Udało mi się też ograniczyć ilość/długość wężyków pneumatycznych, dzięki czemu w power-packi nie ma takiego spagetti jak wcześniej.
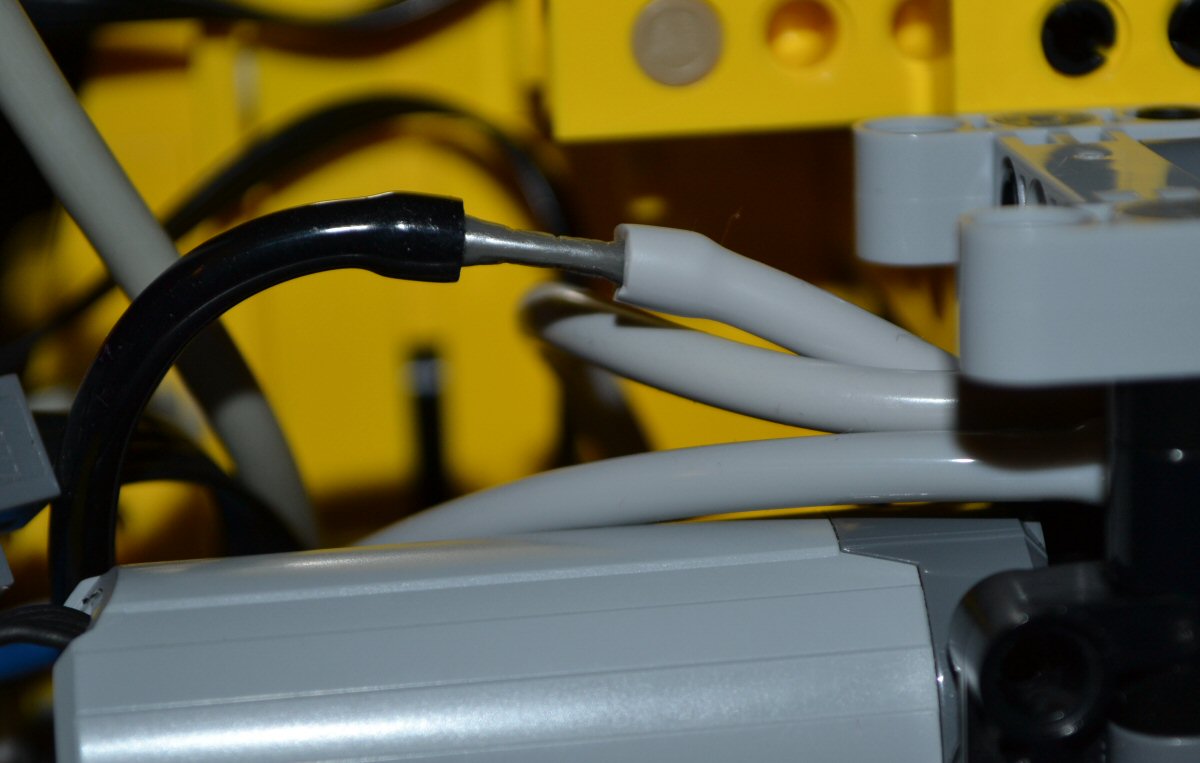
Jeszcze jedna rzecz: postanowiłem odrobinę zdławić powrót powietrza z siłownika przy funkcji opuszczania wysięgnika, w linię wstawiłem nieco ściśnięty odcinek twardego wężyka:

Po przebudowie układu pneumatycznego model nie ma problemu z podnoszeniem wysięgnika wraz z wypełnionym chwytakiem, duże kompresory dostarczają na tyle dużo powietrza, że model działa szybko i płynnie.
Postanowiłem również przebudować podparcie nadwozia na wieńcu obrotu, ale o tym napisze następnym razem jak już dotrze do mnie kolejne zamówienie z BL.
Aha - po przebudowie układu pneumatycznego "odzyskałem" 2 silniki L z zespołu kompresora i 2 zębatki z36 z zaworów "Żbika", czyli 4 brakujące ogniwa w wersji układu jazdy "na bogato", więc jest szansa, że jednak model będzie się poruszał dzięki 4 silnikom L.
I taka drobnostka jeszcze - podregulowałem naciąg gąsienicy skrajnymi rolkami prowadzącymi, już powinno być ok., natomiast przy przejazdach po panelach hałas na pewno będzie, "sorry, taki mamy klimat" :)
Posiedziałem trochę z budulcem i zgodnie z wcześniejszą zapowiedzią wprowadziłem kilka zmian w modelu.
Przede wszystkim przebudowałem układ pneumatyczny i w tej chwili za zasilanie układu pneumatycznego odpowiadają 2 duże pompki + 2 silniki XL, po 1 pompce i 1 silniku na funkcję podnoszenia ramienia boom i stick.
Wcześniej zespół kompresorów wyglądał tak:

Teraz wygląda tak:
Niestety taki zespół kompresorów zajmuje więcej miejsca niż jego poprzednik, dlatego zmuszony byłem szukać gdzieś indziej oszczędności.
Wcześnniej zapowiadałem, że:
Zawory w takiej konfiguracji zajmują niestety sporo miejsca, dlatego też postanowiłem zbudować coś na własne potrzeby i tak powstało to:Sterowanie funkcji pneumatycznych serwomotorami pomysłu Żbika
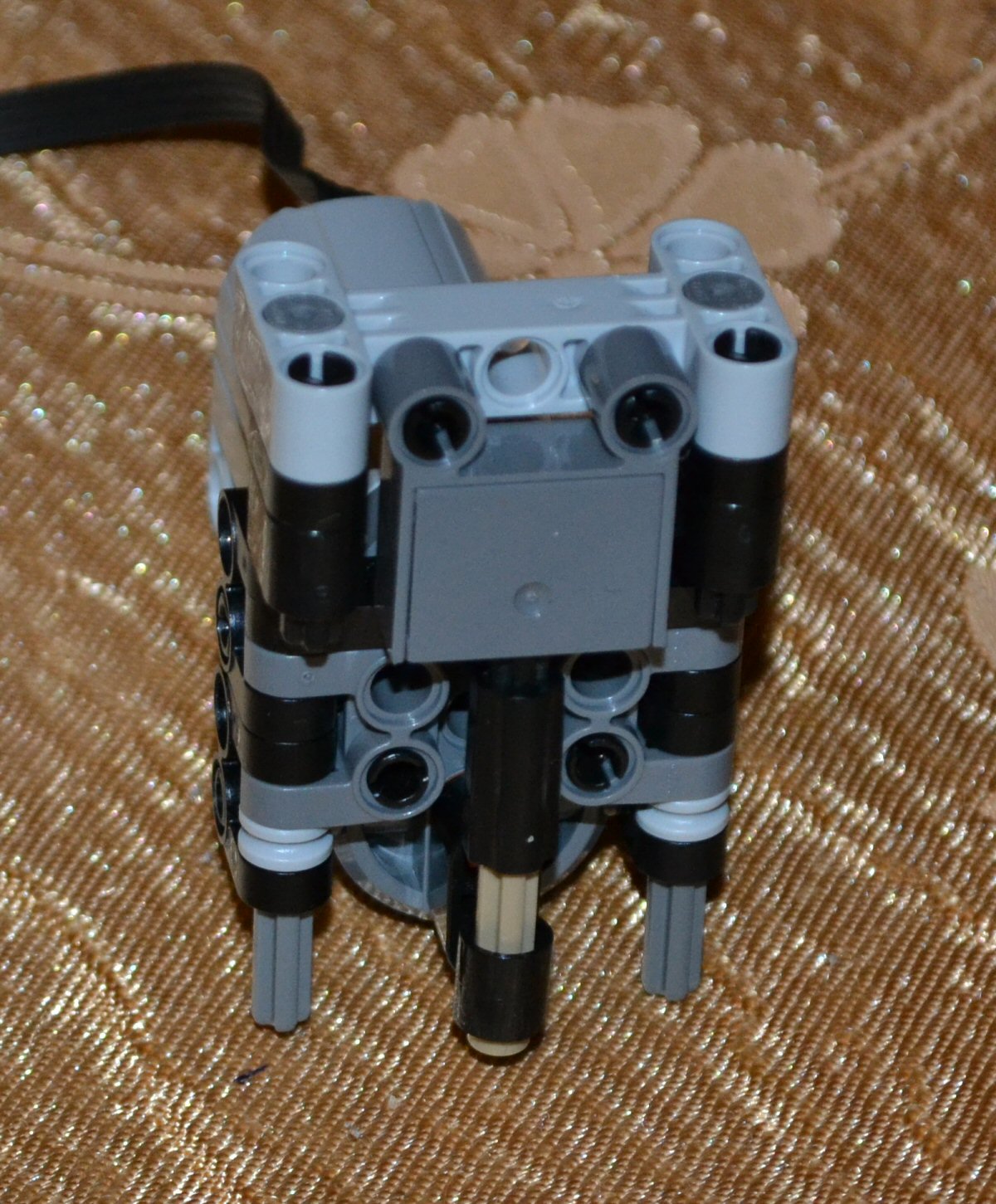
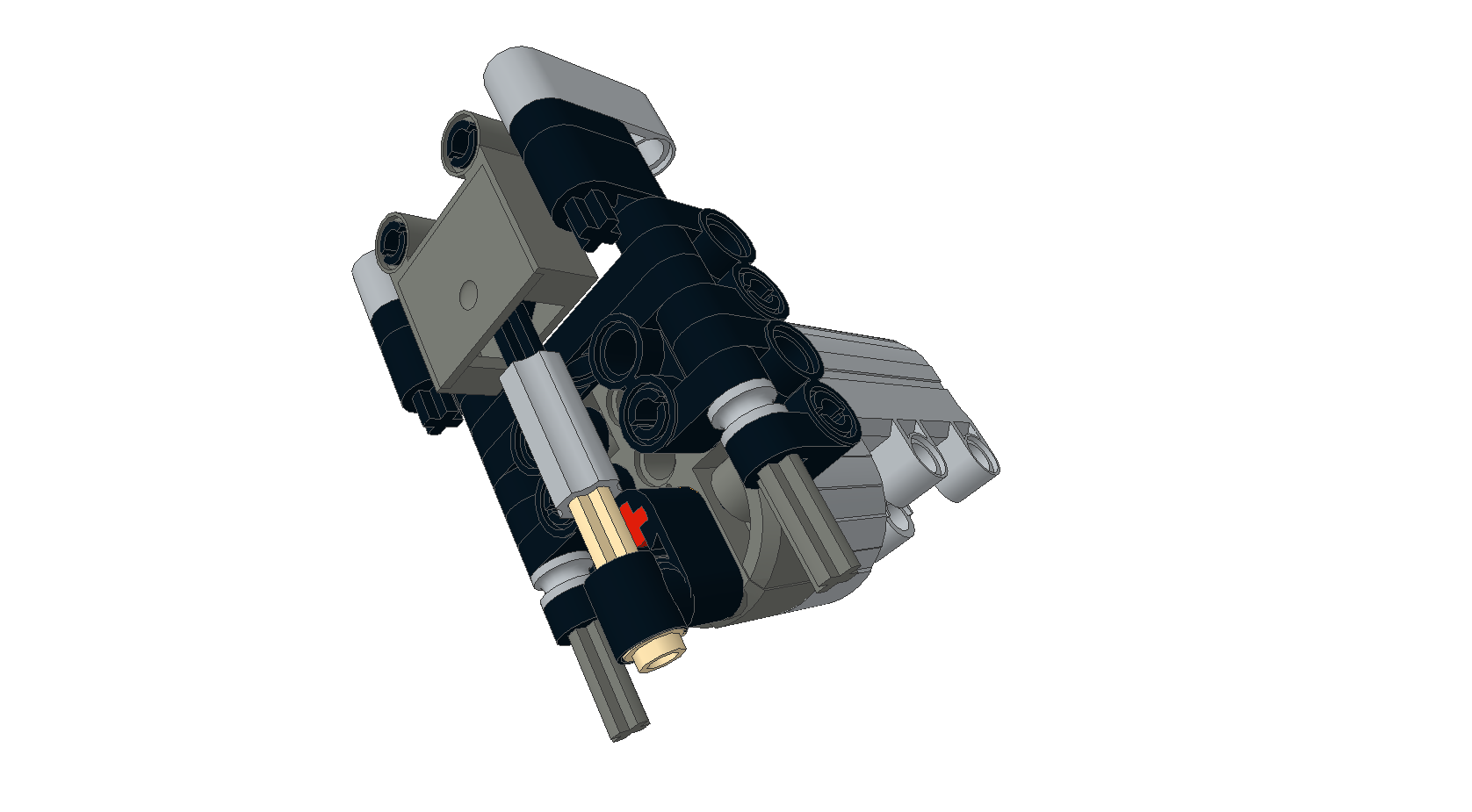
Nie zamierzam oczywiście doszukiwać się wyższości jednego rozwiązania nad drugim, natomiast to co udało mi się osiągnąć to:
- skrócenie zaworu o 3 study (u Żbika jest 12 studów, u mnie 9)
- w mojej konstrukcji można obrócić zawór o 180 st. dzięki czemu wejścia/wyjścia wężyków można skierować w pożądanym kierunku, o tak:
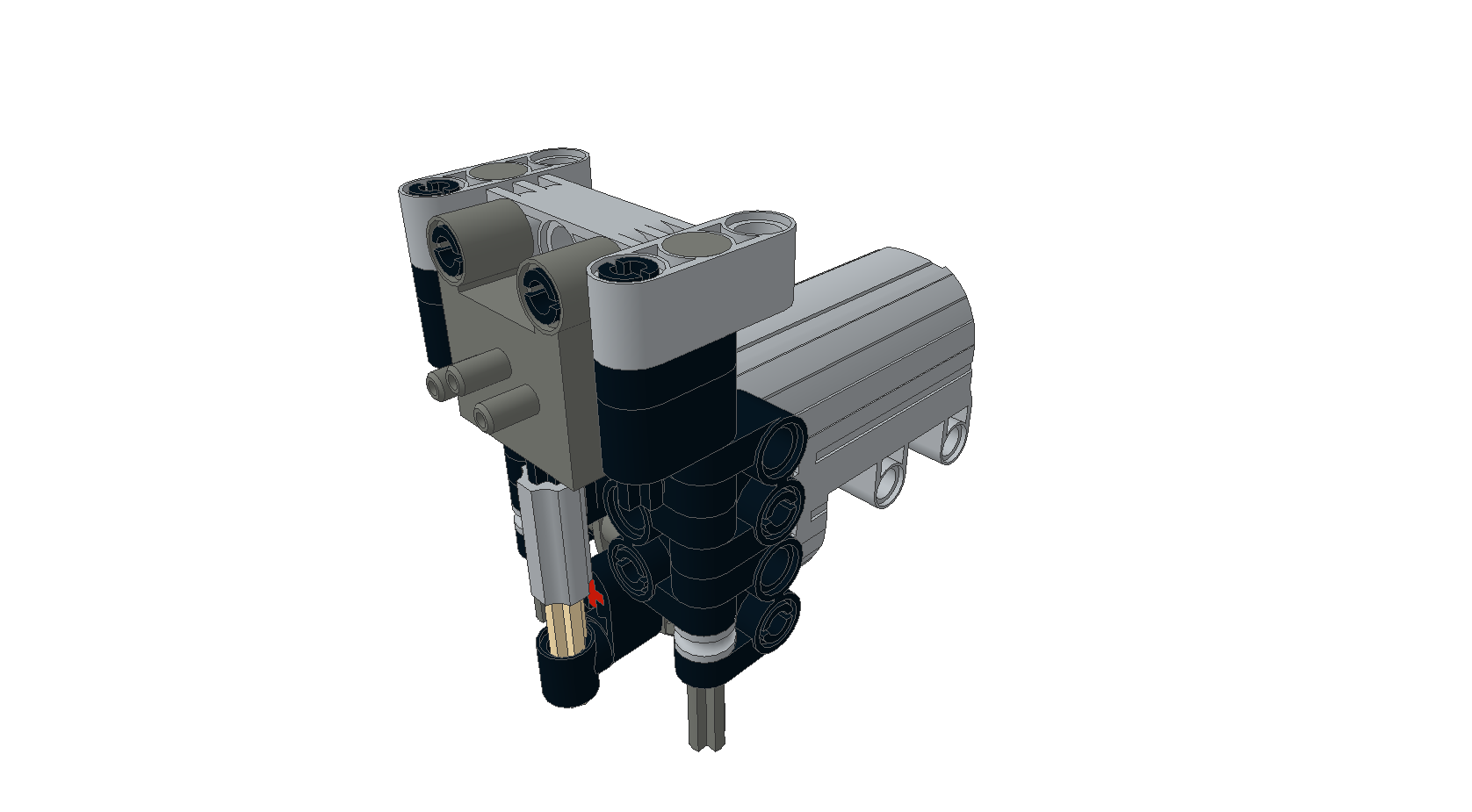
Zawory działają poprawnie, wychylenie dźwigienki zaworu jest w dolnym zakresie minimum, przy którym zawór zaczyna przepuszczać powietrze.
Tak powstały kompresor i zawory trafiły do power-packa, i wszystko udało się ładnie upchnąć:

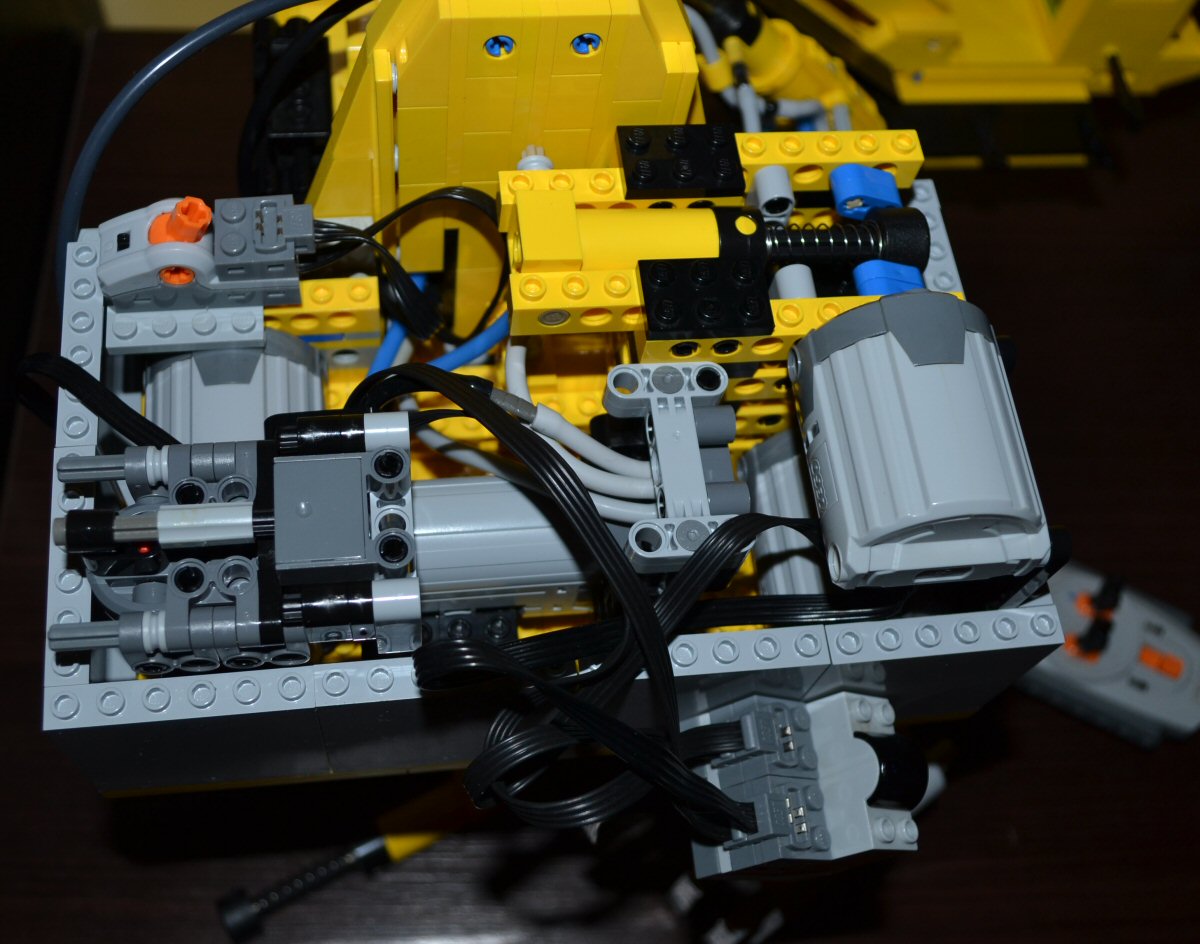
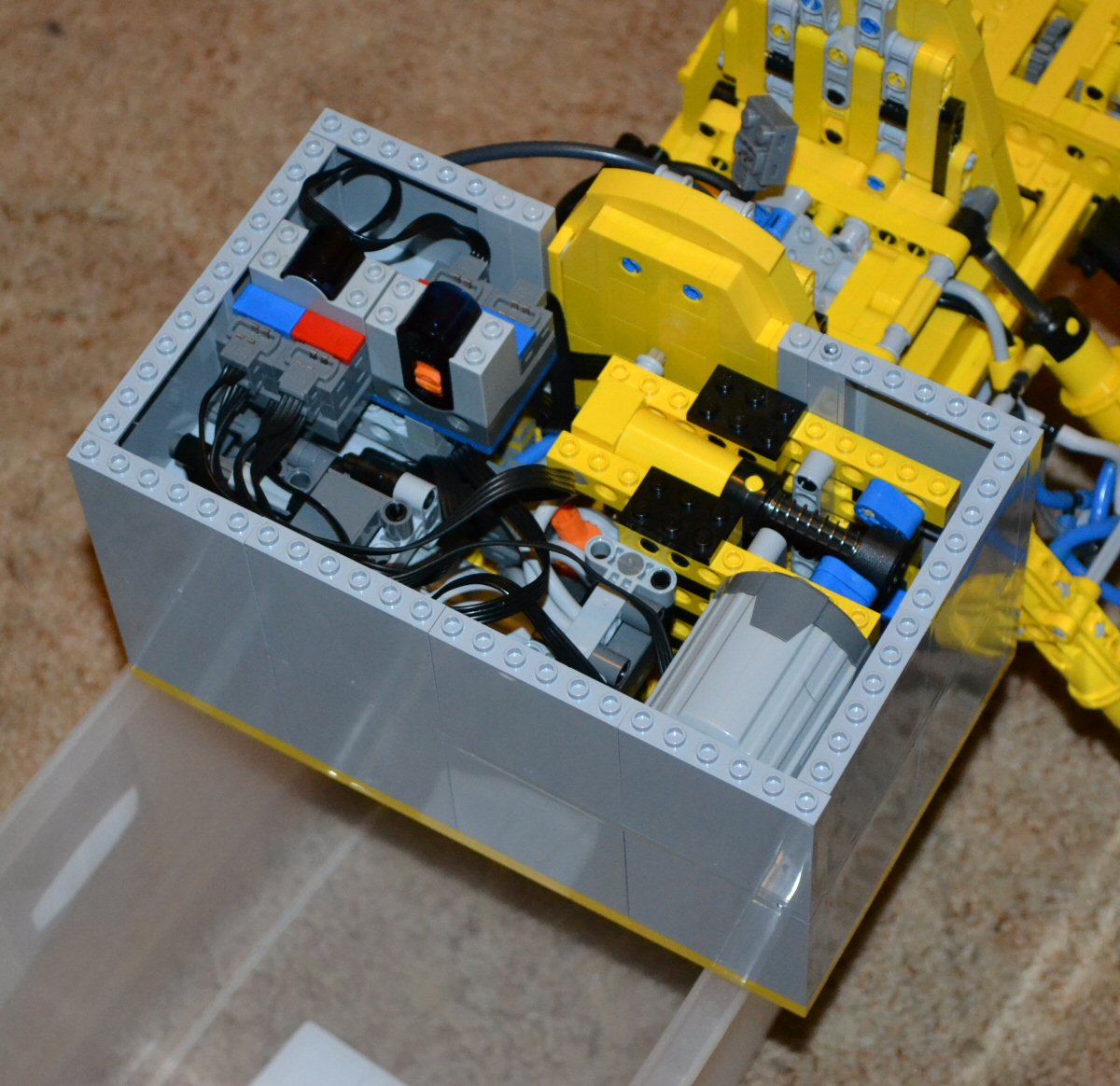
Udało mi się też ograniczyć ilość/długość wężyków pneumatycznych, dzięki czemu w power-packi nie ma takiego spagetti jak wcześniej.
Jeszcze jedna rzecz: postanowiłem odrobinę zdławić powrót powietrza z siłownika przy funkcji opuszczania wysięgnika, w linię wstawiłem nieco ściśnięty odcinek twardego wężyka:
Po przebudowie układu pneumatycznego model nie ma problemu z podnoszeniem wysięgnika wraz z wypełnionym chwytakiem, duże kompresory dostarczają na tyle dużo powietrza, że model działa szybko i płynnie.
Postanowiłem również przebudować podparcie nadwozia na wieńcu obrotu, ale o tym napisze następnym razem jak już dotrze do mnie kolejne zamówienie z BL.
Aha - po przebudowie układu pneumatycznego "odzyskałem" 2 silniki L z zespołu kompresora i 2 zębatki z36 z zaworów "Żbika", czyli 4 brakujące ogniwa w wersji układu jazdy "na bogato", więc jest szansa, że jednak model będzie się poruszał dzięki 4 silnikom L.
I taka drobnostka jeszcze - podregulowałem naciąg gąsienicy skrajnymi rolkami prowadzącymi, już powinno być ok., natomiast przy przejazdach po panelach hałas na pewno będzie, "sorry, taki mamy klimat" :)
-
Żbik
- Administrator
- Posty: 2960
- Rejestracja: 2006-06-06, 15:34
- Lokalizacja: Gdynia
- brickshelf: Zbiczasty
-
Fajny pomysł. A nie za duże tarcie podczas pracy ten pin z otworem na axla daje? Będzie się sypał proszek :)noniusz pisze:Zawory w takiej konfiguracji zajmują niestety sporo miejsca, dlatego też postanowiłem zbudować coś na własne potrzeby i tak powstało to:
Nie zamierzam oczywiście doszukiwać się wyższości jednego rozwiązania nad drugim, natomiast to co udało mi się osiągnąć to:
- skrócenie zaworu o 3 study (u Żbika jest 12 studów, u mnie 9)
"As nigdy nie odmawia w słusznej sprawie!"
ABC prezentacji MOCy | Zamienniki wężyków pneumatycznych | Sklepik z gadżetami klubowymi
ABC prezentacji MOCy | Zamienniki wężyków pneumatycznych | Sklepik z gadżetami klubowymi
-
Żbik
- Administrator
- Posty: 2960
- Rejestracja: 2006-06-06, 15:34
- Lokalizacja: Gdynia
- brickshelf: Zbiczasty
-
A jak z precyzją sterowania? Zawór puszcza po całości czy leciutko?
"As nigdy nie odmawia w słusznej sprawie!"
ABC prezentacji MOCy | Zamienniki wężyków pneumatycznych | Sklepik z gadżetami klubowymi
ABC prezentacji MOCy | Zamienniki wężyków pneumatycznych | Sklepik z gadżetami klubowymi
-
noniusz
- VIP
- Posty: 1073
- Rejestracja: 2011-11-23, 21:02
- Lokalizacja: Poznań
- brickshelf: gkurkowski
- Kontakt:
-
Na pusto dziala to calkiem fajnie, glownie dzieki przeciwwadze, natomiast "pod obciazeniem" tj. z pelnym chwytakiem nalezy zachowac szczegolna ostroznosc, bo leci w dol dosc szybko, ale na to juz chyba niewiele poradze. Przy wyprostowanym wysiegniku rownolegle do powierzchni ciezar chwytaka oddalony jest ok. 1 m od osi obrotu, wiec pewnych praw fizyki nie obejde...
-
Żbik
- Administrator
- Posty: 2960
- Rejestracja: 2006-06-06, 15:34
- Lokalizacja: Gdynia
- brickshelf: Zbiczasty
-
A moim próbowałeś to sterować? Poza tym u Ciebie widzę, że jest możliwość sterowania stopniem wychylenia dźwigienki zaworu poprzez przybliżenie/oddalenie samego zaworu od silnika. Minus ten, że tylko co 1/2 grubości lifta.
"As nigdy nie odmawia w słusznej sprawie!"
ABC prezentacji MOCy | Zamienniki wężyków pneumatycznych | Sklepik z gadżetami klubowymi
ABC prezentacji MOCy | Zamienniki wężyków pneumatycznych | Sklepik z gadżetami klubowymi
-
noniusz
- VIP
- Posty: 1073
- Rejestracja: 2011-11-23, 21:02
- Lokalizacja: Poznań
- brickshelf: gkurkowski
- Kontakt:
-
Na etapie testów pamiętam, że gdy zawór od silnika oddalony był pół studa dalej niż obecnie nie przepuszczał już powietrza, więc teoretycznie ta konfiguracja jest optymalna.
Jeśli chodzi o tolerancję to można by zastosować bardzie dokładną niż 0,5 studa stosując w roli dystansów dziurawą część np tego klocka, wtedy tolerancja wynosiła by 0,5 grubości płytki.
Ewentualnie można by spróbować jeszcze zastosować nowe zawory V2, bo z tego co zauważyłem potrzebują odrobinę większego wychylenia dźwigienki do przepuszczenia powietrza. Np. Twój zawór z nowym zaworem V2 nie przepuszczał powietrza.
------------------------------------
Tak sobie jeszcze robię rachunek sumienia i szybkie opuszczanie ramienia może mieć źródło w tym, że nie zastosowałem auto-valve, który załączałby kompresor. U mnie niezależnie czy ramię podnoszę czy opuszczam powietrze jest podawane na siłowniki. Jeżeli powietrze podawane jest również przy opuszczaniu wysięgnika to pewnie w jakimś stopniu przyspiesza jego opadanie. W realiach Lego teoretycznie szło by to obejść, należało by dołożyć 1 PF switch do układu, tylko, że to znowu znacznie wpływa na objętość miejsca potrzebną na pomieszczenie wszystkiego.
Jeśli chodzi o tolerancję to można by zastosować bardzie dokładną niż 0,5 studa stosując w roli dystansów dziurawą część np tego klocka, wtedy tolerancja wynosiła by 0,5 grubości płytki.
Ewentualnie można by spróbować jeszcze zastosować nowe zawory V2, bo z tego co zauważyłem potrzebują odrobinę większego wychylenia dźwigienki do przepuszczenia powietrza. Np. Twój zawór z nowym zaworem V2 nie przepuszczał powietrza.
------------------------------------
Tak sobie jeszcze robię rachunek sumienia i szybkie opuszczanie ramienia może mieć źródło w tym, że nie zastosowałem auto-valve, który załączałby kompresor. U mnie niezależnie czy ramię podnoszę czy opuszczam powietrze jest podawane na siłowniki. Jeżeli powietrze podawane jest również przy opuszczaniu wysięgnika to pewnie w jakimś stopniu przyspiesza jego opadanie. W realiach Lego teoretycznie szło by to obejść, należało by dołożyć 1 PF switch do układu, tylko, że to znowu znacznie wpływa na objętość miejsca potrzebną na pomieszczenie wszystkiego.
Ostatnio zmieniony 2015-12-13, 15:09 przez noniusz, łącznie zmieniany 1 raz.
-
noniusz
- VIP
- Posty: 1073
- Rejestracja: 2011-11-23, 21:02
- Lokalizacja: Poznań
- brickshelf: gkurkowski
- Kontakt:
-
Ok. wygląda na to, że jestem w końcu na ostatniej prostej i to jeden z ostatnich wpisów w temacie WIP.
2 ostatnie zamówienia z BL dotarły i udało mi się poskładać mechanikę i bryłę modelu.
Tak jak pisałem w ostatnim updejcie zmieniłem podparcie obrotu i w tej chwili wygląda to tak:


Rolki podparte są z obu stron i sztywniej trzymają się obudowy porównując z poprzednią wersją,
Dodatkowo spód podwozia, który ma mieć styczność z tymi rolkami tam gdzie mogłem "podbiłem" Tile, Modified 2 x 2 Inverted, o mniej więcej tak:

Dzięki temu funkcja obrotu działa zdecydowanie lepiej, o wiele mniej "buja" przy wykonywanych funkcjach. Natomiast nie jest to ruch jednostajnie płynny, nie cała spodnia powierzchnia jest gładka.
Tak jak się odgrażałem, funkcja jazdy ostatecznie zbudowana jest "na bogato" tj. za jazdę odpowiadają 4 silniki L. Dodatkowo dziś robiłem testy i udało mi się wyeliminować efekt kałasznikowa przy przejazdach po podłodze.
I na koniec postanowiłem zbudować sobie swój własny manipulator do zabawy, ma wyglądać mniej więcej tak:




Wszystko działa fajnie, jedynie opuszczanie całego wysięgnika mogło by działać mniej zaskakująco (podobnie jak w fabrycznym 8421), ale tu na to chyba nic nie poradzę.
Także wygląda na to, że została już tylko estetyka i kosmetyka, a później już tylko wizyty w zakładach pracy :)
2 ostatnie zamówienia z BL dotarły i udało mi się poskładać mechanikę i bryłę modelu.
Tak jak pisałem w ostatnim updejcie zmieniłem podparcie obrotu i w tej chwili wygląda to tak:
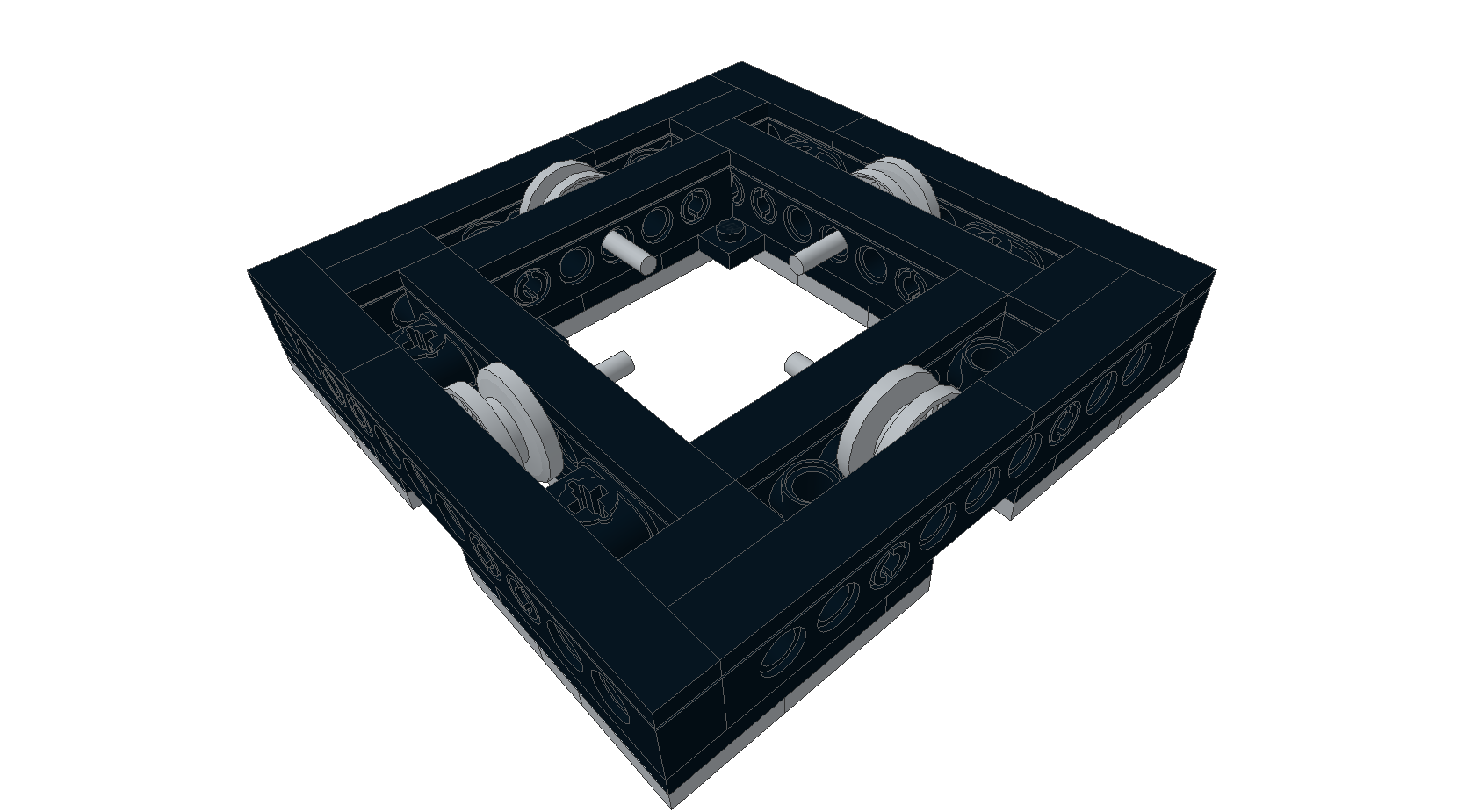
Rolki podparte są z obu stron i sztywniej trzymają się obudowy porównując z poprzednią wersją,
Dodatkowo spód podwozia, który ma mieć styczność z tymi rolkami tam gdzie mogłem "podbiłem" Tile, Modified 2 x 2 Inverted, o mniej więcej tak:
Dzięki temu funkcja obrotu działa zdecydowanie lepiej, o wiele mniej "buja" przy wykonywanych funkcjach. Natomiast nie jest to ruch jednostajnie płynny, nie cała spodnia powierzchnia jest gładka.
Tak jak się odgrażałem, funkcja jazdy ostatecznie zbudowana jest "na bogato" tj. za jazdę odpowiadają 4 silniki L. Dodatkowo dziś robiłem testy i udało mi się wyeliminować efekt kałasznikowa przy przejazdach po podłodze.
I na koniec postanowiłem zbudować sobie swój własny manipulator do zabawy, ma wyglądać mniej więcej tak:


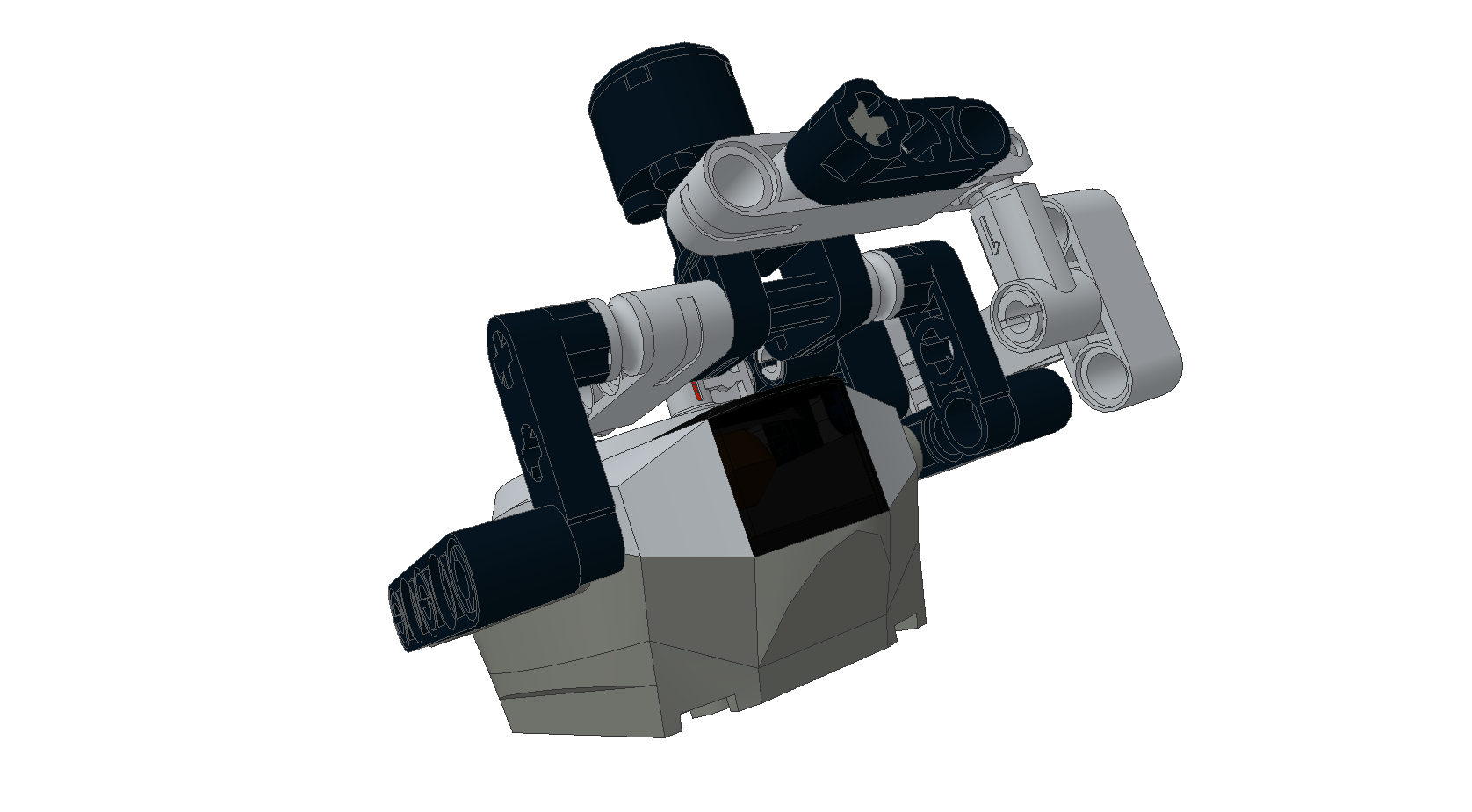

Wszystko działa fajnie, jedynie opuszczanie całego wysięgnika mogło by działać mniej zaskakująco (podobnie jak w fabrycznym 8421), ale tu na to chyba nic nie poradzę.
Także wygląda na to, że została już tylko estetyka i kosmetyka, a później już tylko wizyty w zakładach pracy :)