Zbudowałem ludzika Lego (czytaj: minifiga) i postanowiłem podzielić się tym z Tobą, Czytelniku LugPOL-a! Brawura? Nie, skądże znowu. Konstrukcja pojawia się w tym dziale nieprzypadkowo, a opis zajmuje więcej niż jedną linijkę z trzech powodów:
* ludzik jest w skali około 15:1, przez co składa się z kilku tysięcy części zamiast czterech standardowych (nogi, tors, głowa, czapka), mierzy 81 studów (ok. 65 cm), a razem z dwunastoma bateriami waży niecałe 5 kg;
* wszystkie ruchy występujące w prawdziwym ludziku LEGO pojawiają się oczywiście też w tym modelu, przy czym są sterowane zdalnie ze standardowych pilotów na podczerwień;
* bryła ludzika jest zbudowana czystym LEGO Technic, tzn. belkami, panelami, z widocznymi pinami i osiami spajającymi konstrukcję, a czasami trafia się nawet jakaś niechciana szczelina; klocki systemowe stanowią tylko delikatne uzupełnienie kształtu w newralgicznych punktach.
Na budowę modelu poświęciłem setki godzin przed komputerem i z klockami w rękach, pierwsze przymiarki zacząłem w listopadzie 2016, ostatnie poprawki naniosłem pod koniec czerwca 2017. Zapraszam Cię do dłuższej lektury.
Fizjonomia.
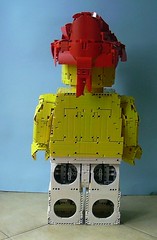
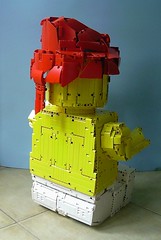
Wybrany ludzik jest piratem, wystąpił na początku lat 90. w zestawach 6235 (Buried Treasure) , 6257 (Castaway’s Raft) i 6261 (Raft Raiders), a wszystkie jego części pojawiły się w zestawach: 6259, 6260, 6273, 6276, 6277, 6279, 6285, 6286 i we wznowieniu Black Seas Barracuda, czyli 10040. Zestaw 6235 dostałem, będąc dzieckiem. Ludzik nosi białe spodnie z dziurami na study, ciemnopomarańczowy pas ze złotą klamrą, podkoszulek w białe i niebieskie poziome pasy oraz czerwone nakrycie głowy zwane bandaną. Na tle innych ludzików tamtych czasów wyróżnia się niebanalną twarzą, gdyż jego uśmiech chowa się pod sumiastym wąsem, na brodzie można odnaleźć ślady zarostu, a czoło zdobi grzywka komponująca się z nakryciem głowy. Tak wygląda mój model z różnych stron (zdjęcia są linkami do zdjęć wyższej rozdzielczości):




* dziury na study w nogach – użyłem łuków 1x5x4 i łuków odwróconych o tych samych wymiarach, wszywając do technicowej konstrukcji ścianę z klocków systemowych,
* dziurę położoną ukośnie w udzie (jeżeli można to udem nazwać) – skończyło się kompromisem polegającym na ukośnym ustawionym łuku 1x5x4, aczkolwiek uzyskałem połączenie stabilne, bo zakleszczone od góry i z dołu;
* przy widoku z przodu zwężające się ku górze nogi – w pewnym momencie od zewnętrznej strony zgubiłem pół studa na każdej nodze;
* adekwatne nachylenie boków torsu – ukośny bok połączyłem z torsem w dwóch miejscach: na wysokości barku (dobrze widoczne żółte łączniki (+)oo) i na wysokości pasa, tak długo wybierałem dolny punkt zaczepienia i dobierałem długość belki łączącej, aż dostałem prezentowane ustawienie;
* kąt zgięcia łokcia równy 135 stopni – stąd obecność podwójnie zgiętych belek, które użyte w taki sposób wnoszą niewymierność w tamto miejsce i powodują karkołomne wypełnianie belkami okolic łokcia;
* wyprofilowanie ramion – stąd rzeźbienie najbardziej podstawowymi technicowymi panelami;
* kształt dłoni – bałem się, że w przyjętej skali żaden klocek nie zapewni oryginalnego kształtu; ucieszyłem się bardzo, gdy dzięki zgiętej belce 6x4 i płaskim trójkątom udało się dość rzetelnie to uzyskać; nie uzyskałem łączenia dłoni do ręki pod kątem niezerowym tworzonym z osią obrotu (u oryginalnego ludzika dłoń jest lekko wygięta w jedną ze stron).
Ponadto nogi, tors i ręce powstały z klocków występujących powszechnie w podstawowych kolorach, żeby dało się je łatwo odtworzyć w innej barwie, na dzień dzisiejszy:
* nogi czarne i czerwone buduje się identycznie jak białe, brak łuków odwróconych utrudnia zbudowanie na żółto lub na jasnoszaro (lbg), poza tym wydaje się możliwe;
* ręce czarne, białe, czerwone powinno budować się bardzo podobnie do żółtych;
* tors to tylko belki i panele, więc bez problemu można go przygotować w każdym kolorze;
* przód torsu jest osobnym modułem i może być przygotowany z dowolnym wzorem.
Na dzień dzisiejszy moim zdaniem nie uda się zbudować kończyn na niebiesko, głównie przez brak powszechnie występującej płaskiej czwórki +oo+ (do nóg i krocza wchodzi ich około 80, do rąk – kilkadziesiąt), brak odwróconych łuków (choć są powszechne w ciemnoniebieskim) oraz w mniejszym stopniu przez brak paneli 7x3x2 (które nadają kształt ramionom).
Osobną sprawą było stworzenie nakrycia głowy, poddałem się artystycznemu natchnieniu, biorąc pod uwagę, że najtańsze są czerwone panele 7x5x2. Bandana nie dość, że jest okrągła, to ma wiele asymetrycznych szczegółów oraz opada ku tyłowi pomimo poziomego zaczepu; ostatnią cechę widać dobrze, gdy obróci się ją na głowie bokiem lub tyłem – zasłania czoło bardziej niż ustawiona przodem. Mam świadomość, że sposób jej konstrukcji różni się od pozostałej części modelu, w niej wszystko połączone jest pod kątem, między innymi za pomocą kątowych łączników.
Poniższe obrazy porównują przeskalowany oryginał i mój model:


* ruch lewą nogą,
* ruch prawą nogą,
* ruch lewą dłonią,
* ruch prawą dłonią,
* ruch lewą ręką,
* ruch prawą ręką,
* obrót nakryciem głowy,
* obrót głową wraz z nakryciem głowy.
Do sterowania ludzikiem LEGO używam pada zrobionego z dwóch pilotów na podczerwień. Lewy pilot steruje lewą częścią ciała i obrotem głowy wraz z nakryciem(#), prawy pilot – pozostałymi funkcjami. Wewnętrzne dźwignie sterują czterostanowymi sekwencyjnymi skrzyniami biegów, które zmieniają działającą funkcję na kolejną w cyklu: noga, dłoń, ręka, głowa/czapka. Budując dwie skrzynie biegów wzorowałem się na tej opublikowanej dawno temu przez Sariela. W poniższym filmie przedstawiam, jak działa ów ludzik oraz zaglądam do jego wnętrza. W części drugiej tego tekstu oczywiście opisałem wszystkie mechanizmy, posiłkując się narysowanymi schematami. Wielkość ludzika zmusiła mnie do pokazania się przed kamerą i powiedzenia kilku słów w języku angielskim.
[youtube]http://www.youtube.com/watch?v=ko_1a0wrbDk[/youtube]
(#) Po dyskusji w tym wątku powstał następujący film, krótszy i bardziej dynamiczny:
[youtube]http://www.youtube.com/watch?v=n4AVzC_LwmU[/youtube]
Kończąc sprawę wyglądu, model różni się od oryginału:* wielkością bandany: skoro zdecydowałem się na obrót nakryciem głowy, między zwisającą częścią bandany a głową musi być luz, przez co bandana w modelu ma większą względną szerokość niż w ludziku LEGO;
* wielkością głowy: w modelu głowa jest delikatnie większa względem torsu niż w ludziku LEGO, w Technicu wygodnie i trwale buduje się na nieparzystą liczbę studów, a zbudowana głowa ma 19 studów średnicy;
* wielkością dłoni: dłonie w modelu są nieco za małe względem reszty ciała, tu nie mam innego pomysłu na dłonie niż ten zaproponowany; takie dłonie mniej zawadzają o nogę, gdy ręka znajduje się w pozycji pionowej;
* wielkością ramienia: model ma względnie grubsze ramię niż ludzik LEGO, wiąże się to z budową mechanizmu, o czym dziale „Anatomia”;
* wyglądem ukośnej dziury na stud w nodze; budowanie na ukos z użyciem odwróconych łuków 1x4x5 zmusiło mnie do takiego kompromisu.
Anatomia.
W głowie znajdują się pojemniki na baterie i są stabilnie związane z torsem. Za obrót głowy odpowiada żółta powłoka z twarzą oraz szyja na trwałe włożona między pudełka z bateriami a tors. Po ściągnięciu czapki można bez przeszkód włączać i wyłączać zasilanie.
Szyja z głową są połączone w czterech miejscach. Głowę można łatwo ściągnąć po podważeniu tych czterech połączeń i wyciągnięciu kilku kołków +pp przy obrotnicy na wysokości czoła. Wówczas można swobodnie wypiąć pojemniki z bateriami i wymienić baterie. Równie szybko ściąga się klatkę piersiową. Po usunięciu wszystkich wymienionych elementów model wygląda następująco:

Z silników XL napęd jest przekazywany do dwóch skrzyń rozdzielczych. W modelu można zamienić podwójny układ z12/z20 znajdujący się bezpośrednio po silniku na podwójny z8/z24, a w szczególności na podwójny z8/z24(clutch), czyniąc zabawkę tak bezpieczną, że nie do końca działającą. Z tej przyczyny zaniechałem zabezpieczającego rozwiązania w ostatecznej wersji.

Z jednego z kół zębatych znajdujących się w skrzyni rozdzielczej napęd jest prowadzony dalej do nóg, po drodze pozycja nogi zostaje utrzymywana ślimacznicą. Dorzuciłem cztery koła zębate, które stabilizują ślimacznicę i jedno z kół zębatych po obu stronach, ponieważ podniesienie nogi jest największym katowaniem klocków w tym modelu. Na pewnym odcinku oba napędy mieszczą się na szerokości trzech studów. Obrotnica jest wsunięta głęboko w nogę, aby po obu stronach znajdowała się podobna masa.





Napęd z lewego silnika jest przenoszony przez koła zębate przedstawione na schemacie:

Na załączonym wcześniej filmie można zobaczyć, że po pełnym obrocie głową czapka jest delikatnie przekręcona. Może to wynikać z ciężaru głowy i czapki, bo bez obciążenia układ wraca do identycznej pozycji.
Zakończenie, a w zasadzie ciekawostki.
* Zacząłem projekt w listopadzie 2016 od nogi. Przy projektowaniu bandany dysponowałem tylko trzema lewymi i trzema prawymi panelami 7x5x2, więc po upewnieniu się, że panel na danym miejscu pasuje, przekładałem go na kolejne. Pomysł wsunięcia obrotnic małych i dużych głęboko do kończyn nie pojawił się od razu. W pierwszej wersji obrotnica była w szyi oraz na styku torsu i kończyny.
* Praktycznie gotowy model zostawiłem na stole, stał przez godzinę potem spadł na podłogę. Nogi rozsypały się od kolan w dół, jedna ręka odpięła się w dziwnym miejscu, głowa się pokrzywiła i częściowo rozpięła, tors pozostał nieruszony.
* Model skalowałem do szerokości krocza, założyłem sobie, że krocze szerokie na trzy study pozwoli poprowadzić dwa mechanizmy z nóg do głównej części mechanizmu oraz da możliwość dobrego usztywnienia miejsca zaczepu nóg. Ponadto w takim modelu zmieści się cała elektronika. Patrząc z perspektywy gotowego modelu – udało się.
* Model ludzika LEGO zaliczy wystawę w Chojnicach, będzie to moja pierwsza wystawa.
* W lipcu lub sierpniu powstanie instrukcja ze zdjęciami, wtedy odkopię temat, jakością będzie przypominać moją ostatnią. Przy okazji może uda się popełnić artykuł do działu „Wirtualne klocki LEGO”, jak taką instrukcję robię, a jest to zaskakujące i skuteczne (bo instrukcja do modelu z kilku tysięcy klocków ma mniej niż 100MB pojemności i spis części w każdym kroku).
* Wygląda na to, że dopadło mnie tempo: 1 duży MOC na kilka-kilkanaście miesięcy, pewnie przy tym pozostanę, nadrabiając dość długim i szczegółowym tekstem.
* Bawi mnie budowanie modeli z LEGO Technic, które nie są modelami pojazdów, a mają nietrywialne mechanizmy, przy tym pozostanę. Postaram się za każdym razem wszystkich zaskoczyć tematyką i pomysłem.
Zapraszam do komentowania, można krócej niż moja wypowiedź.
----------
#edycja






