[MOC] Robot Technic
: 2017-08-30, 20:59
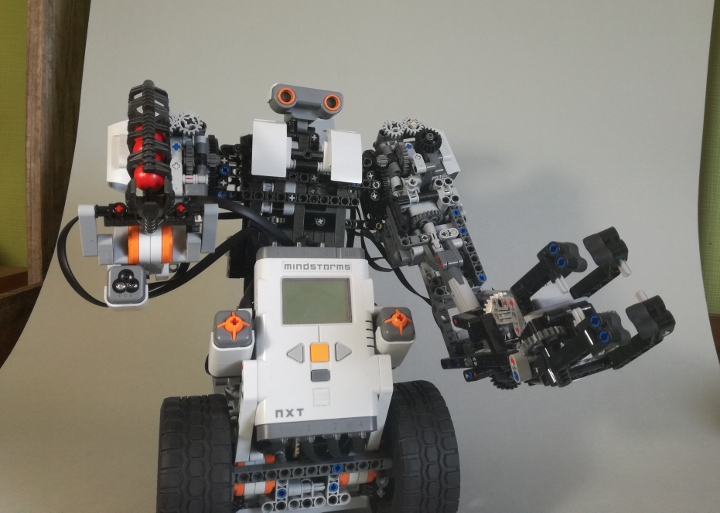
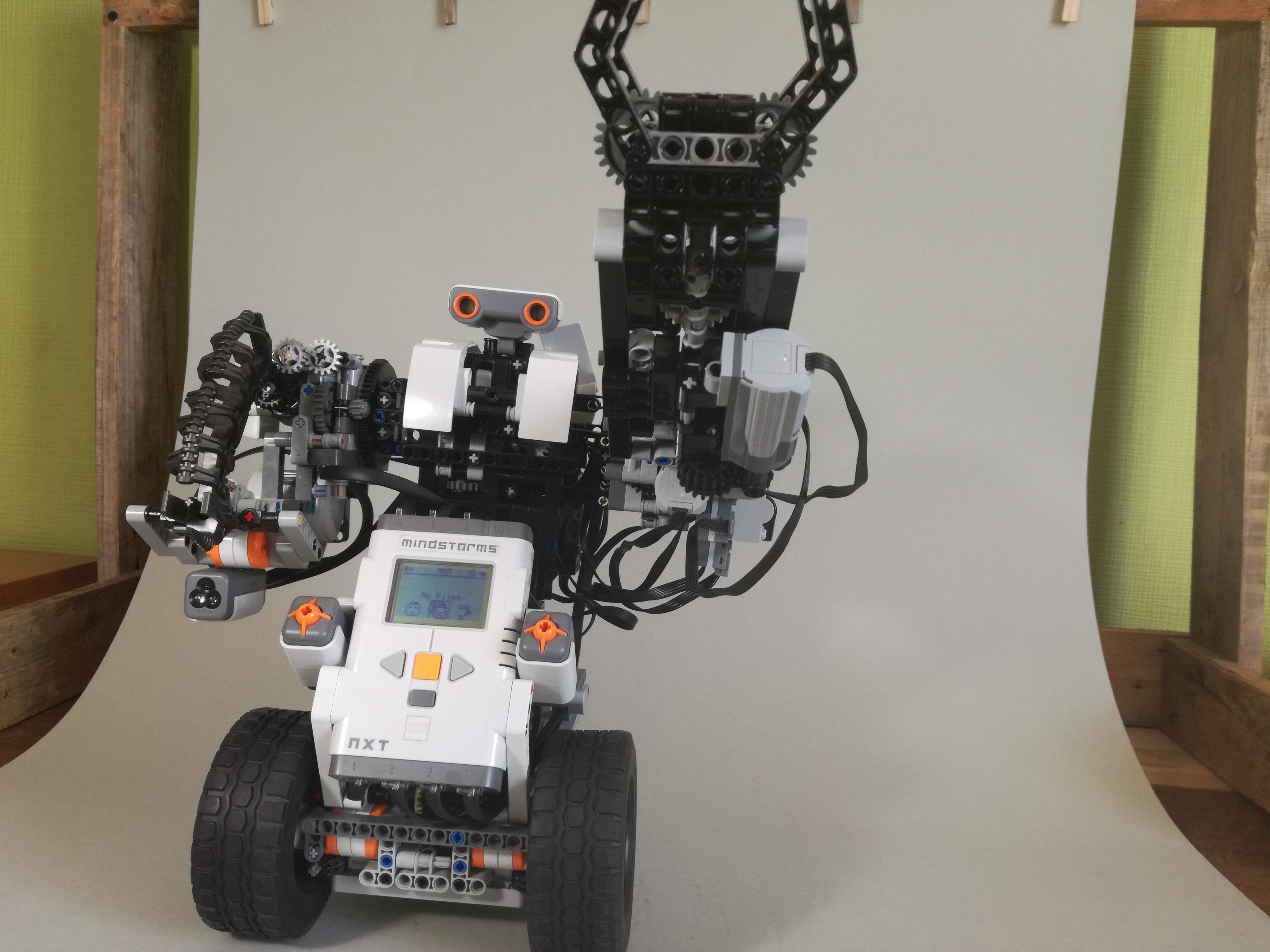
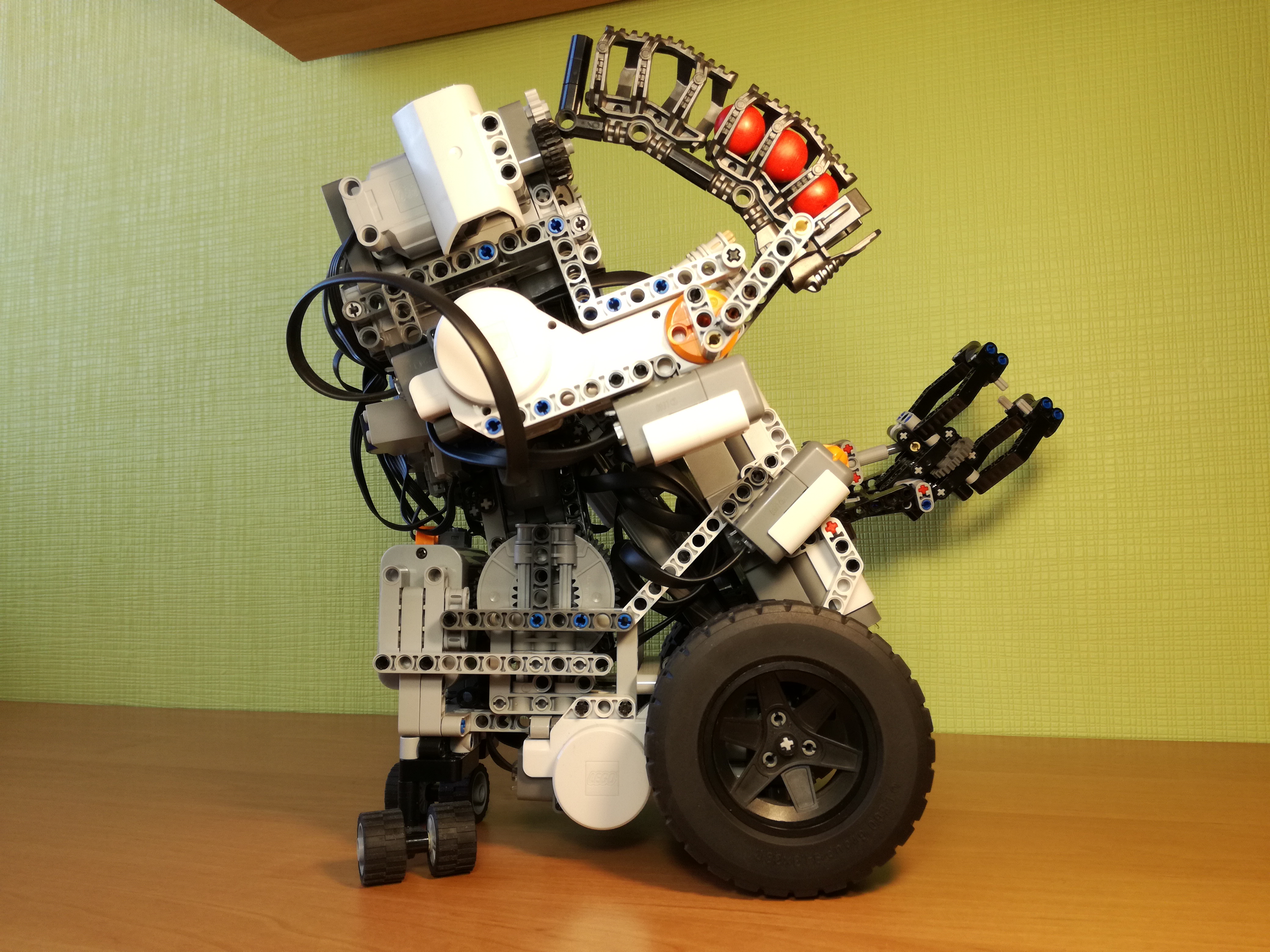
Witam, chciałbym zaprezentować mojego pierwszego oficjalnego MOCa.
Jest to robot technic z elementami mindstormsa(którego wykorzystuję tylko do sterowania).
Projekt zaczął powstawać parę miesięcy lecz dopiero ostatnio go obfotografowałem.
Po kolei funkcje i silniki za nie odpowiadające:
Lewe ramię:
-zaciskanie ''szczęk" ręki; silnik M zwolniony 36 razy i zamykający "szczęki" za pomocą ślimacznicy,
-zginanie ramienia w nadgarstku; silnik M zwolniony 3 razy ze sprzęgłem na mały siłownik,
-zginanie ramienia w łokciu; silnik M zwolniony 2 razy, ruch realizowany przez duży siłownik,
-obrót ramienia w barku; silnik L zwolniony wpierw na zębatkach a potem na ślimacznicy i na obrotnicy(szczegóły mechanizmu w mojej galerii),
-zginanie ramienia w barku; silnik L, umieszczony we wnętrzu robota, zwolniony wpierw 3 razy a następnie ślimacznica na zębatce z40 podnosi belkę przymocowaną do ramienia,
Prawe ramię:
-obrót ramienia w barku; lustrzane odbicie lewego ramienia;
-zabójcza broń oferowana w zestawie 8547 przymocowana do jeszcze groźniejszego robota niż oryginalnie; silnik mindstorms,
Podwozie(tułów):
-balansowanie tułowiem przód tył, silnik M zwolniony ok 16 razy
-i najtrudniejsze napęd dwóch wielkich kół; realizowany jest bezpośrednio przez dwa silniki mindstorms, tylne koła coś w rodzaju kółeczek od wózka na zakupy,
Waga robota osiągnęła 2,3 kg.



I jeszcze powstało coś w rodzaju filmu:
https://youtu.be/sG2G3S-cfrQ
Czujniki mindstorms pełnią jedynie funkcję dekoracyjną.
Link do galerii, wraz ze zdjęciami w czasie pracy nad nim:
http://www.brickshelf.com/cgi-bin/gallery.cgi?f=568554
Jest to robot technic z elementami mindstormsa(którego wykorzystuję tylko do sterowania).
Projekt zaczął powstawać parę miesięcy lecz dopiero ostatnio go obfotografowałem.
Po kolei funkcje i silniki za nie odpowiadające:
Lewe ramię:
-zaciskanie ''szczęk" ręki; silnik M zwolniony 36 razy i zamykający "szczęki" za pomocą ślimacznicy,
-zginanie ramienia w nadgarstku; silnik M zwolniony 3 razy ze sprzęgłem na mały siłownik,
-zginanie ramienia w łokciu; silnik M zwolniony 2 razy, ruch realizowany przez duży siłownik,
-obrót ramienia w barku; silnik L zwolniony wpierw na zębatkach a potem na ślimacznicy i na obrotnicy(szczegóły mechanizmu w mojej galerii),
-zginanie ramienia w barku; silnik L, umieszczony we wnętrzu robota, zwolniony wpierw 3 razy a następnie ślimacznica na zębatce z40 podnosi belkę przymocowaną do ramienia,
Prawe ramię:
-obrót ramienia w barku; lustrzane odbicie lewego ramienia;
-zabójcza broń oferowana w zestawie 8547 przymocowana do jeszcze groźniejszego robota niż oryginalnie; silnik mindstorms,
Podwozie(tułów):
-balansowanie tułowiem przód tył, silnik M zwolniony ok 16 razy
-i najtrudniejsze napęd dwóch wielkich kół; realizowany jest bezpośrednio przez dwa silniki mindstorms, tylne koła coś w rodzaju kółeczek od wózka na zakupy,
Waga robota osiągnęła 2,3 kg.

I jeszcze powstało coś w rodzaju filmu:
https://youtu.be/sG2G3S-cfrQ
Czujniki mindstorms pełnią jedynie funkcję dekoracyjną.
Link do galerii, wraz ze zdjęciami w czasie pracy nad nim:
http://www.brickshelf.com/cgi-bin/gallery.cgi?f=568554