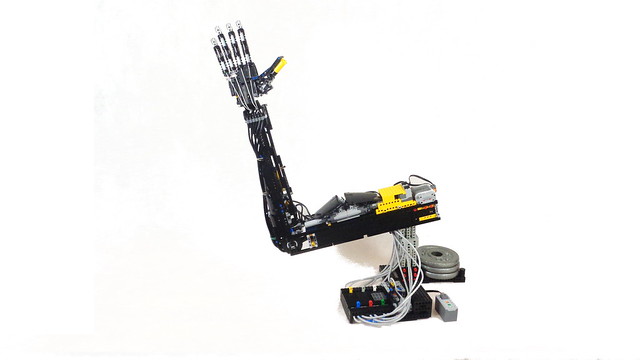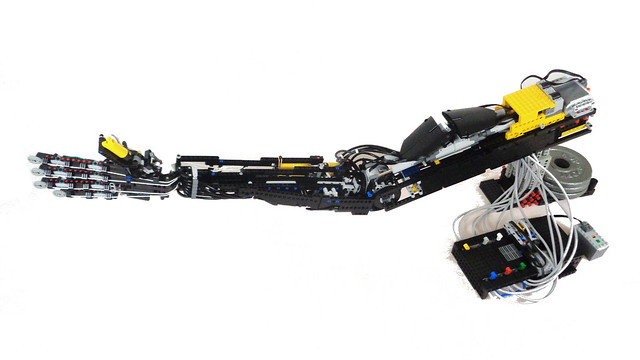
Wymiary:
- Długość: 103 cm
- Waga: ok. 1,7 kg (ramię bez podstawki)
Ciekawe elementy:
- 2 różne battery boxy
- 2 czujniki podczerwieni, umożliwiające zdalne sterowanie;
- 5 silników Medium;
- 1 silnik XL, który napędza kompresor;
- 7 siłowników pneumatycznych;
- 4 siłowniki śrubowe;
- 6 zaworów doprowadzających powietrze do każdego siłownika;
- pompa kompresora napędzaną jednym wyżej wymienionych silników;
- wyłącznik ciśnieniowy, który odłącza kompresor, gdy w układzie zapanuje zbyt duże ciśnienie
Skoro zapoznaliśmy się już z bill of material, pora przyznać się co skłoniło mnie do budowy. Otóż, pomysł narodził mi się w głowie jakieś 5 i pół roku temu jak natknąłem się na ten film:
[youtube]https://www.youtube.com/watch?v=KR3IiXvzrds&t=1s[/youtube]
Jak na tamten czas obejrzana koncepcja wydawała mi się bardzo ciekawa, genialna wręcz w pomyśle i zastosowanych rozwiązaniach. Dodatkowo należy zwrócić uwagę na fakt, że autor wstawił dostępną dla wszystkich instrukcję budowy w opisie filmu, co może się przydać jeśli komuś z was przyszedł by pomysł, aby podjąć się budowy modelu o własnych siłach, ale nie będę dłużej kusił. Ja sam po latach miałem przyjemność zrekonstruować owe ramię, w dosyć dokładny sposób, natomiast szczerze zawiodłem się na działaniu. Duże obciążenia i sztywność niektórych części powodowały przerwy w działaniu, a czasem nawet blokowały zakres ruchów (szczególnie dłoni i nadgarstka). Ponadto, niektóre łączenia wymagały wzmocnienia, bo zdarzało się nie raz, że dana część się odczepiła, a oczywiście można było temu zapobiec. Pytacie skąd taka ocena? Te spostrzeżenia wyrobiłem sobie, ponieważ w ostatnim czasie otrzymałem zaproszenie na jeden festiwal popularnonaukowy, a szukając inspiracji z czym mógłbym tam pojechać pomysł od razu wpadł mi do głowy. Co prawda istniały różnice pomiędzy tym co było na filmie, a tym co osobiście zbudowałem i taką rzeczą były np. przewody, bo (ze względu na koszty) użyłem sztywniejszych poliuretanowych zamiast silikonowych jak w oryginale, a piszę to tym właściwie tylko dlatego, że niby taka mała zmiana a nastręczyła sporych problemów. Bo założenie ich na legowe siłowniki, zawory i rozdzielniki wymagało niemałej siły, dlatego też szybko po pierwszych próbach zacząłem stosować patent z rozpychaniem ich gwozdziem, a do tego oczywiście bez smaru się nie obyło. Po godzinach spędzonych na ich łączeniu odciski na palcach były okropne...
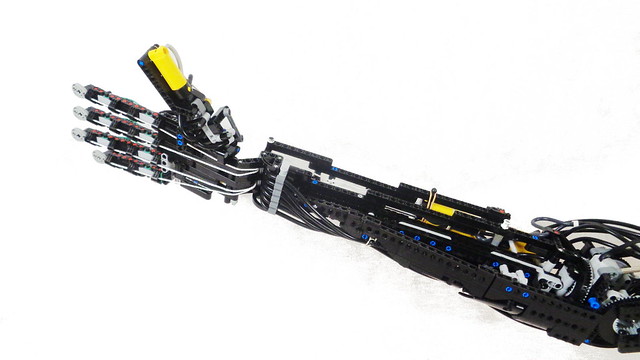
Tak więc, mając to wszystko na uwadze, wyznaczyłem sobie za cel zbudowanie tego lepiej, mocniej i bardziej kompaktowo (bo co prawda o tym nie wspomniałem, ale pierwotne ramię było dość duże z nieproporcjonalnie wręcz wielką dłonią). Pomysł miałem cały czas gdzieś z tyłu głowy, zbudowałem jeden moduł służący do obrotu pozniejszego przedramienia gdzieś na początku tego roku, a reszta prac ruszyła właściwie po tym jak dowiedziałem się o trzeciej już edycji konkursu organizowanego przez PB: El-Robo-Mech. Tym sposobem dalsze prace potoczyły się gładko i zwięzle. Całokształt ramienia miałem właściwie gotowy czwartego dnia budowy o ile dobrze pamiętam, a całość zajęła trochę dłużej niż tydzień, no może dwa :) Najwięcej roboty, co już chyba przywykło do większych modeli było z przewodami. Tym razem, na szczęście już silikonowymi, dlatego łatwiej było je zakładać i nie były takie sztywne. Za to było ich tyle, że w konstrukcji ramienia jak i przedtem musiałem przewidzieć specjalne szyby dla nich, w przeciwnym wypadku wystawałyby za model niszcząc jego estetykę. Jednak to nie przewody miały być innowacyjnością w tej koncepcji. Tak naprawdę, główną różnicą, która zaważyła na prostocie działania, wielkości dłoni, a co za tym idzie i całego ramienia była budowa palców poruszanych dwoma siłownikami poprzez system linek, zakładanych na podobieństwo ścięgien w ludzkiej dłoni. A właściwie to od tego zacząłem ową konstrukcję, inspiracja pojawiła się po tym. Ten zabieg pozwolił znacznie odchudzić dłoń, nadając jej tym samym bardziej realistyczny wygląd. Co do działania, będę trochę leniwy w opisie, co nie znaczy, że opiszę je powierzchownie. Po prostu, poniżej macie w większości skopiowany tekst z mojej prezentacji (choć może nie powinienem tego pisać, bo teraz nie będzie chciało się wam czytać :3), która chyba nie jest taka zła skoro zakwalifikowała się jak na razie do pierwszego etapu konkursu :) No i oczywiście film:
Opis ogólny
Robot posiada dwie funkcje elektryczne i sześć pneumatycznych. Funkcje w pełni elektryczne obejmują dwie możliwości ruchu przedramienia: zginanie wokół stawu łokciowego oraz obrót nadgarstka o 90 stopni wokół osi wzdłużnej przedramienia. Obie są sterowane pilotem na podczerwień dzięki czujnikom umieszczonym na cięższym końcu ramienia. Wśród funkcji pneumatycznych mamy natomiast te typowe dla motoryki małej człowieka. Są nimi: ruch nadgarstka wokół osi poprzecznej przedramienia oraz funkcje odpowiedzialne za chwyt i ułożenie palców. Ruchy te są wykonywane dzięki siłownikom pneumatycznym, z których każdy podłączony jest do oddzielnego zaworu. Te z kolei – wszystkie napędzane są jednym kompresorem poprzez wyłącznik ciśnieniowy.
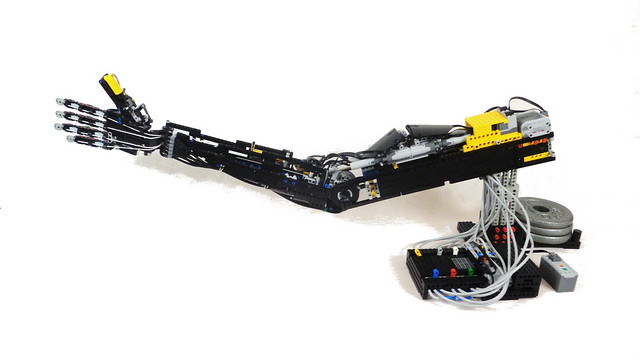
Układ elektryczny
W skład całego modelu wchodzą łącznie: 2 pojemniki na baterie, 2 czujniki podczerwieni sterowane pilotem, 5 silników o momencie 3,6 N*cm i jeden mocniejszy o momencie 14,5 N*cm (uwzględniając w tym ich redukcję wewnętrzną). Słabsze silniki wykorzystane są do napędzania funkcji elektrycznych: cztery z nich, parami sprzężone na sztywno odpowiadają za zginanie ramienia wokół łokcia, a ostatni z nich, piąty został użyty do jego obrotu. Szósty, największy silnik natomiast został wykorzystany do napędzania kompresora. Cały obwód jest zasilany napięciem 9V.
Układ pneumatyczny
W skład tego układu wchodzą: kompresor z pojedynczym tłokiem o średnicy d=16 mm i takim samym skoku (s), wyłącznik ciśnieniowy, 6 zaworów, 2 siłowniki o d=16, s=48, 4 siłowniki o d=16, s=28 oraz 2 miniaturowe siłowniki o d=8, s=16. Wygląda to w ten sposób, że spora część jak i „serce” całego układu w postaci kompresora znajduje się poza ramieniem, a wszystkie komponenty są z nim połączone poprzez silikonowe przewody o średnicy wewnętrznej 2 mm. Układ oparty jest o jednokierunkowy przepływ powietrza, tzn. powietrze jest zawsze wpompowywane w każdy siłownik niezależnie od tego czy się wysuwa czy wsuwa. Całość działa pod względnie niewielkim ciśnieniem.

Funkcja 1: Obrót przedramienia wokół jego własnej osi
Ten ruch jest możliwy dzięki konstrukcji, w której ruchoma część przedramienia jest osadzona na obrotnicy o średnicy 56 mm napędzanej pojedynczym silnikiem poprzez parę zębatek walcowych i przekładnię ślimakową. To ułożenie daje nam ostatecznie 338,8 N*cm momentu siły z jaką ręka wraz z dłonią oraz chwytanym przedmiotem będzie się obracać. Jest to całkiem sporo nawet jeśli uwzględnimy straty sprawności wynikające z tarcia i chociażby sztywność przewodów, które lekko hamują rękę w nadgarstku, gdzie są skumulowane.
Funkcja 2: Podnoszenie i opuszczenie przedramienia
Druga i ostatnia zarazem funkcja sterowana w pełni elektrycznie to najprościej mówiąc ruch góra-dół przedramienia wraz z dłonią w oparciu o staw łokciowy. Ruch ten zawdzięczamy czterem silnikom o łącznym momencie 14,5 N*cm, z których każdy przyłączony jest do jednego siłownika śrubowego o wysięgu 40 mm. Właśnie przez te siłowniki, silniki są parami sprzężone ze sobą na sztywno, a w praktyce wygląda to tak, że po prostu sumuje się ich siła. Staw łokciowy w celu zminimalizowania tarcia oraz zwiększenia precyzji ruchu oparty jest na dwóch ulokowanych symetrycznie obrotnicach o d=56 mm.
Funkcja 3: Zmiana nachylenia dłoni w nadgarstku
Czynność ta odbywa się za pośrednictwem dwóch siłowników pneumatycznych o łącznej sile nacisku 59,6 N. Ze względu na sam ciężar dłoni, można zauważyć, że szybciej wykonuje ona ruch w przód, ale nie odgrywa to większej roli w sposobie poruszania się modelu. Dzięki tej funkcji motoryka dłoni wydaje się być jeszcze bardziej naturalna.
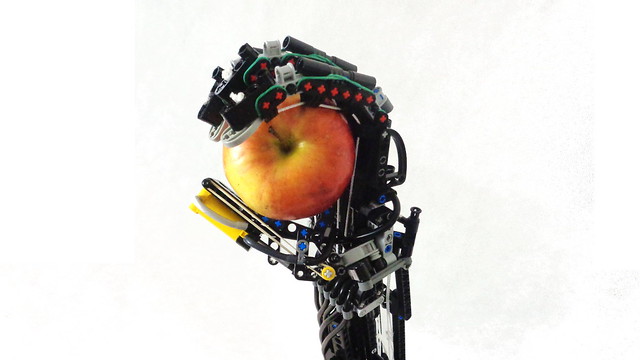
Funkcje 4 i 5: Zginanie palców dłoni
Zginanie poszczególnych palców odbywa się za pomocą dwóch kolejnych siłowników pneumatycznych podłączonych do różnych zaworów, a co za tym idzie – sterowanych osobno. Innymi słowy: po przesunięciu jednej dźwigni zaworu zegną się lub wyprostują dwa palce: wskazujący i środkowy albo serdeczny i mały. Mamy więc do dyspozycji dwie dźwignie, a więc i dwie funkcje, które zdecydowałem się w tym miejscu opisać jako jedną, bo przecież chodzi nam najczęściej o jedno i to samo: aby robot uchwycił i przemieścił jakiś przedmiot. Patrząc pod tym względem jest to spore ułatwienie, ponieważ wykonując domyślnie prostą czynność nie musimy zawracać sobie głowy ułożeniem poszczególnych palców i ich segmentów. Robot zrobi to za nas dobierając odpowiednią siłę nacisku w każdym segmencie dzięki sprytnemu ulokowaniu recepturek i linek napinających.
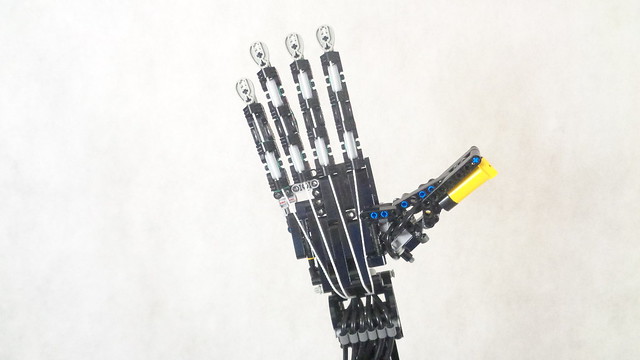
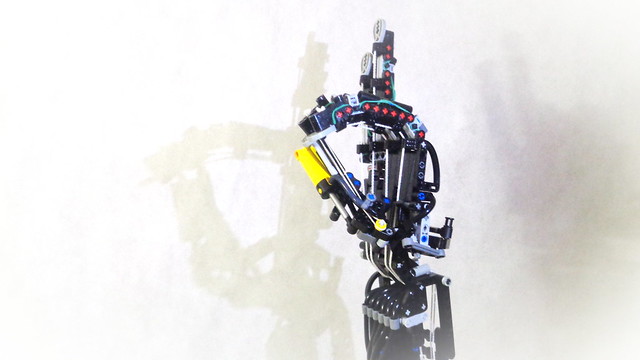
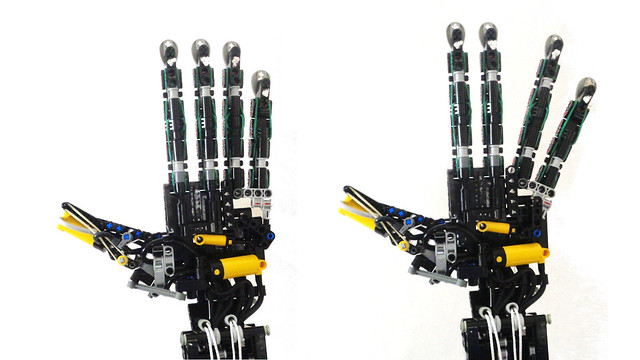
Funkcje 6 i 7: Ruch kciuka
Na ostateczne położenie przeciwstawnego palca w tym modelu wpływają dwa siłowniki, takie same jakie wykorzystałem do zmian nachylenia dłoni, czyli o d=16 i s=28. Pierwszy z nich widoczny jest na zewnętrznej stronie dłoni i odpowiada za ruch kciuka do przodu i w tył. Dzieje się to za pomocą przeniesienia siły wysięgu przez pojedyncze cięgno o łączeniach kulowych i długości między środkami łączeń l=40mm (ciemnoszare na zdj.) do części właściwej kciuka zamocowanej na osi pod kątem 53 stopni względem linii zgięcia dłoni. Drugi siłownik jest umieszczony w ten sposób, że jego dolna nasada znajduje się praktycznie przy samym zakończeniu kciuka. Jest odpowiedzialny za ruch palca do środka bądź na zewnątrz dłoni. Oba z nich są sterowane osobno.
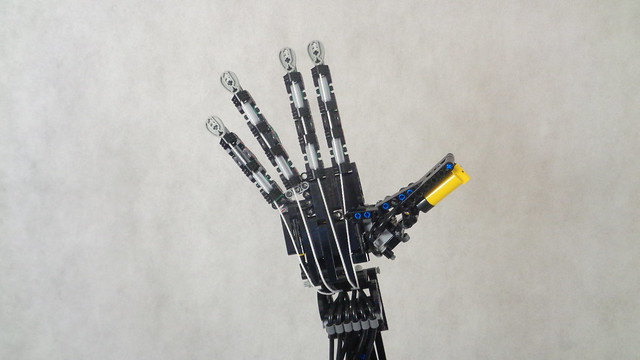
Funkcja 8: Rozpostarcie palców
Ten ruch rozumiemy przez swobodne odchylanie palców, tak aby każdy znajdował się bliżej lub dalej od sąsiada na płaszczyźnie wyprostowanej dłoni. Zależnie od tego czy chcemy uchwycić duży czy też mały przedmiot, możemy zmienić szerokość „luk” pomiędzy palcami poprzez rozpostarcie ich. Za tę niewinną funkcję odpowiada najmniejszy z zastosowanych w modelu siłowników pneumatycznych o d=8 i s=16 umieszczony po zewnętrznej stronie dłoni. Przy pełnym rozpostarciu nieco spada nam napięcie linek odpowiadających za zginanie małego i serdecznego palca, ale nie zmienia to faktu, że ta czynność dalej jest w pełni możliwa.
Słowami zakończenia, z tego miejsca muszę wam szczerze pogratulować, że doszliście do tego miejsca, bo sam pisząc to nie wiedziałem do końca, że tak dużo mi to zajmie. W sprawach dalszego rozwoju mogę powiedzieć tyle, że planuję dalej rozwijać projekt, a pierwsze pomysły na to już padły. Przede wszystkim zacznę od przejścia z trybu ręcznego sterowania zaworami do zaworów sterowanych serwomechanizmami, <afole nie czytać> np. przez laptop i płytkę Arduino, gdzie po wpisaniu odpowiednich komend będziemy mogli otwierać i zamykać poszczególne dopływy powietrza. W czym to ma niby pomóc? Otóż, nieraz sterując ramieniem ręcznie musimy przełączać więcej niż jedną dźwignię w celu wykonania prostej czynności. W domniemanym przypadku np. po wpisaniu komendy „catch” system sam odpowiednio dobierze, które porty zostaną otwarte, a z czasem może ich się zrobić nawet sporo... Co więcej, gdy będziemy mieli już płytkę Arduino w układzie, będę mógł poszerzyć model o zaprojektowany własnoręcznie cyfrowy miernik ciśnienia, który będzie przydatny do monitorowania jak zmienia się ciśnienie w obwodzie oraz system pomiaru ciężaru i wielkości chwytanych obiektów. </afole nie czytać> W planach mam także rozbudowanie ramienia o odporny na działanie dużych sił staw barkowy, który znacznie poszerzyłby zakres ruchu robota.
Obecnie projektem zainteresowali się The Brothers Brick, chociaż podsumowując dużego szumu to ten model nie zrobił jakby ktoś mnie o to pytał. Ramię brało udział w jednym, wyżej wspomnianym konkursie i było na dwóch lokalnych prezentacjach, a za dwa dni pojedzie na kolejny robomeeting w kategorii freestyle, dlatego być może to choć trochę tłumaczy mnie z późnej publikacji :) Jutro postaram się wstawić pozostałe zdjęcia na forum.
PS: Pod koniec mam do Was jeszcze jedną uwagę: Otóż w ostatnim czasie chciałem udzielić się na Eurobricks, a ponieważ byłem tam świeży próbowałem założyć konto, ale EB nie wysyła mi linku aktywacyjnego. Dlatego też, moje pytanie brzmi: czy ktoś z Was nie mógłby utworzyć tam wpis na temat tego modelu?