[MOC] Robot przemysłowy
: 2020-06-09, 00:37
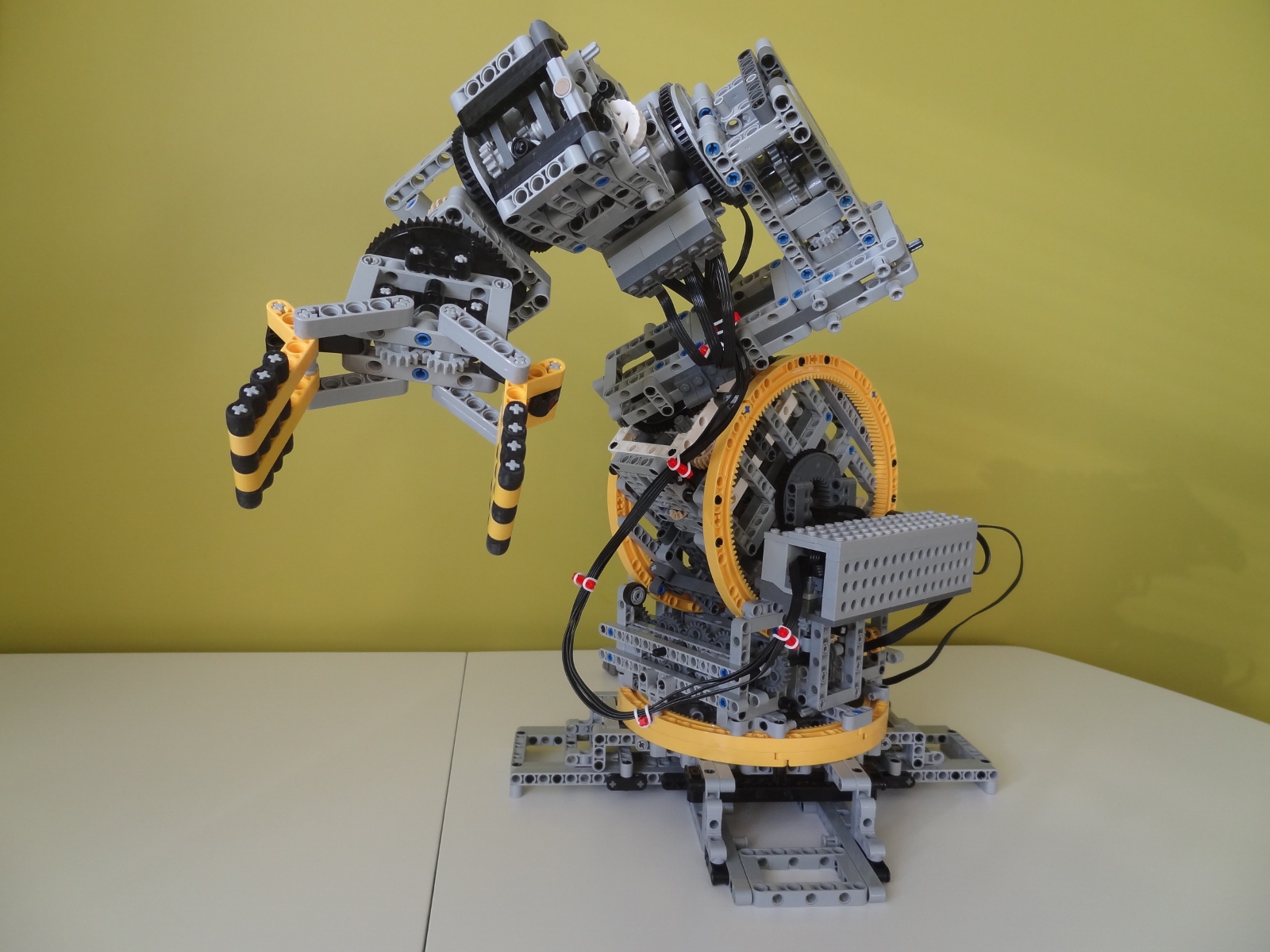
Witam wszystkich i przedstawiam moją interpretację robota przemysłowego :)

Dane techniczne
6 silników M
1 silnik XL
4 wieże IR
1 bateria
Robot posiada 6 ruchów plus chwyt. Jest umieszczony na podstawie i ma zasięg w promieniu ok. 43 cm.



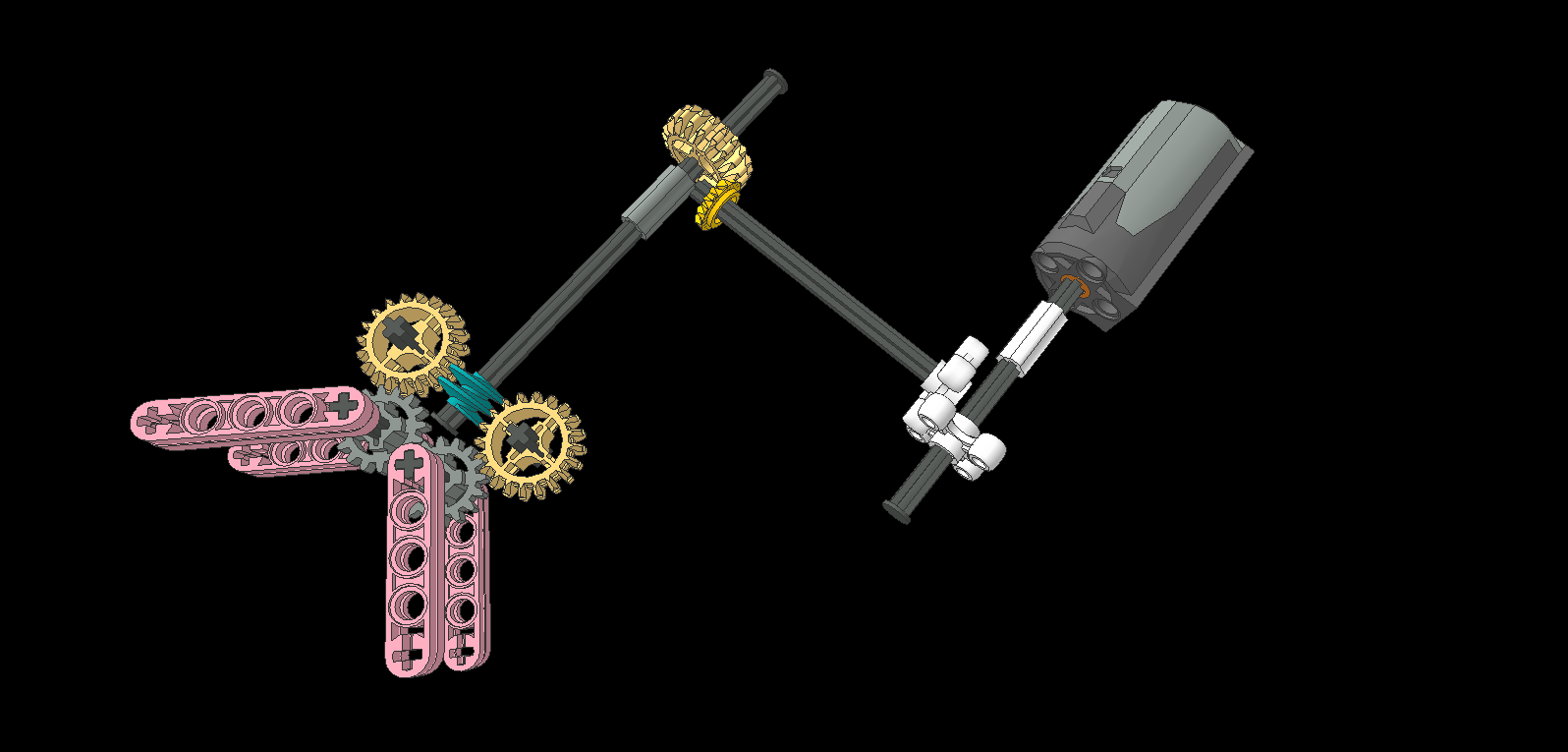
Chwyt
Zaczynając budowę od tego elementu zależało mi na pewnej charakterystyce ruchu, czyli równoległym dociskaniu. Ważne też było, aby chwyt nie był zbyt mały. Niestety pozostała wada, czyli ruch do przodu podczas zamykania. Chwyt jest zabezpieczony nowym sprzęgłem liniowym.

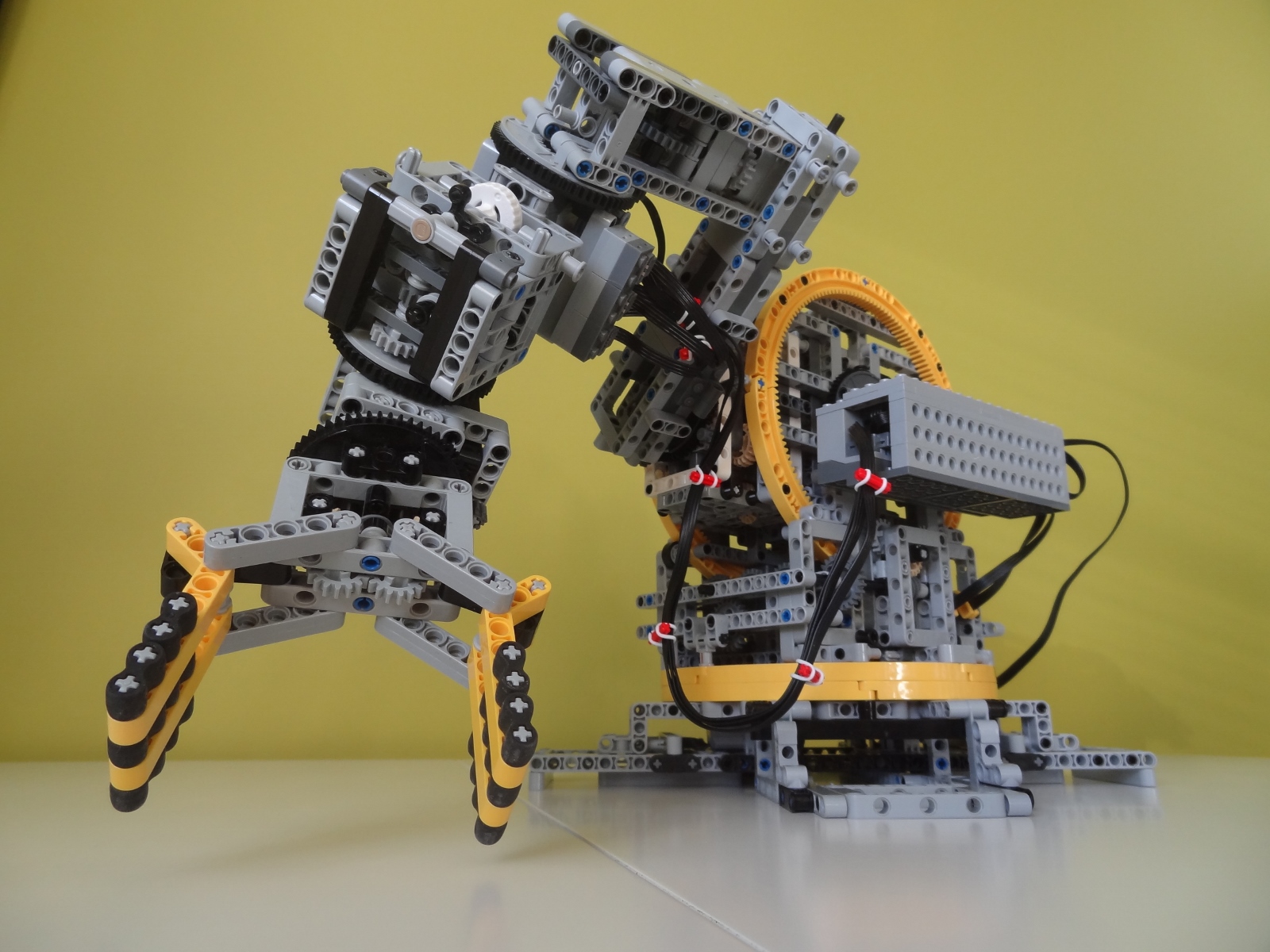
Ramię
Chwytak jest połączony z ramieniem, które porusza się w czterech punktach na obrotnicach. Zwykle takie ramię jest proste i jednocześnie długie. Ja zdecydowałem się na kształt litery U, aby maksymalnie skrócić odległaść chwytaka do mocowania obrotnicy z wieżą przy zachowaniu pełnej ruchliwości.




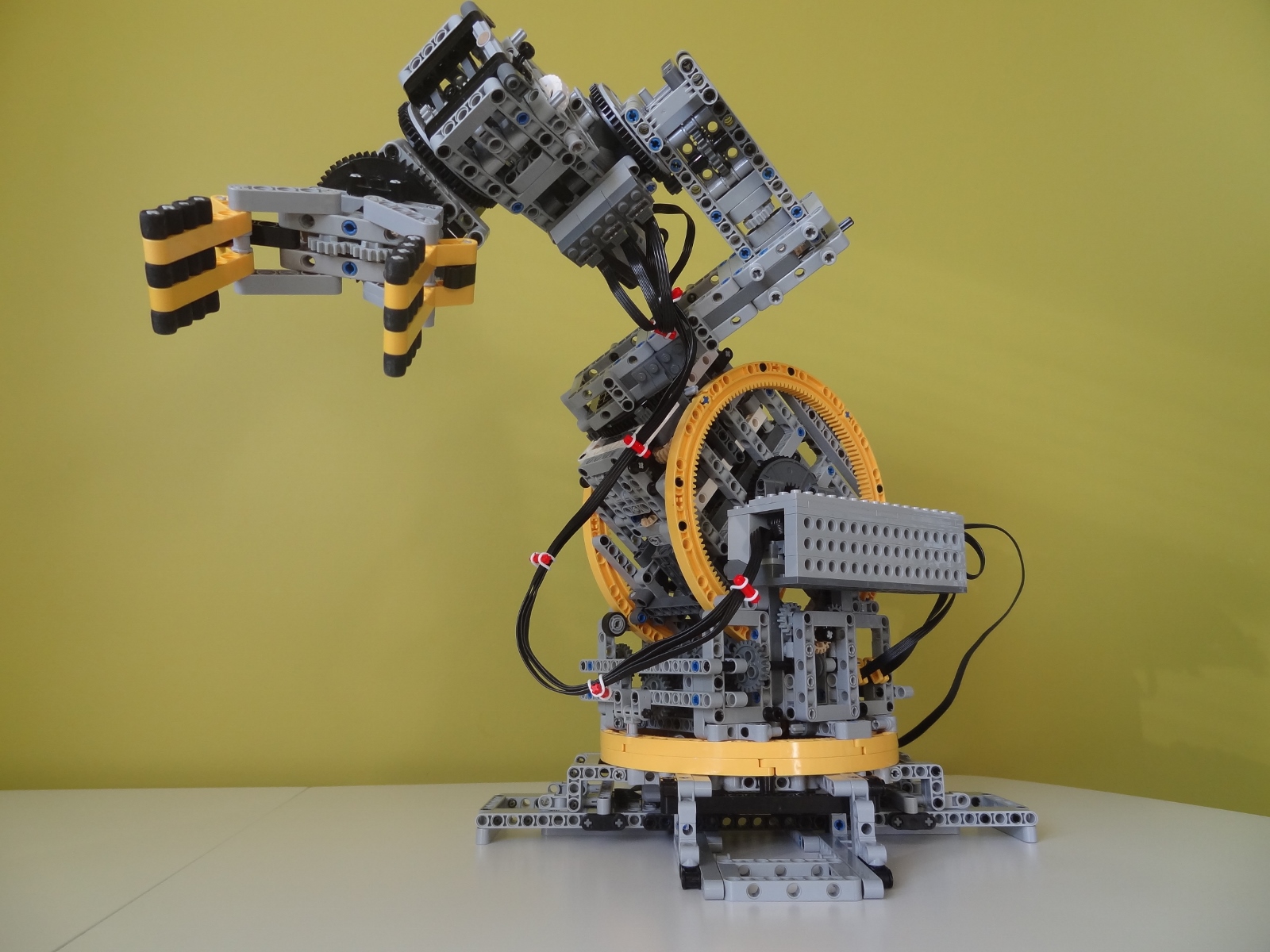
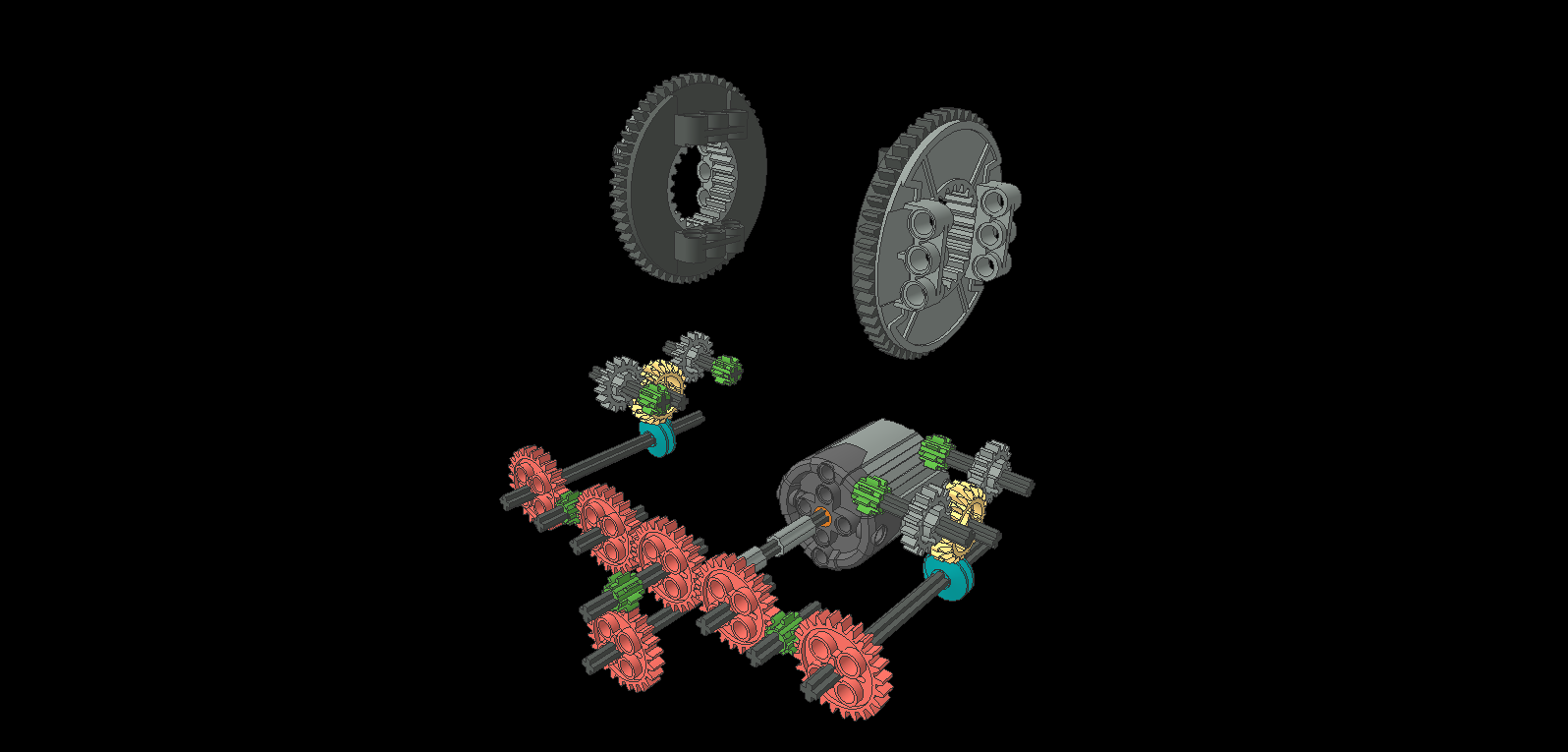
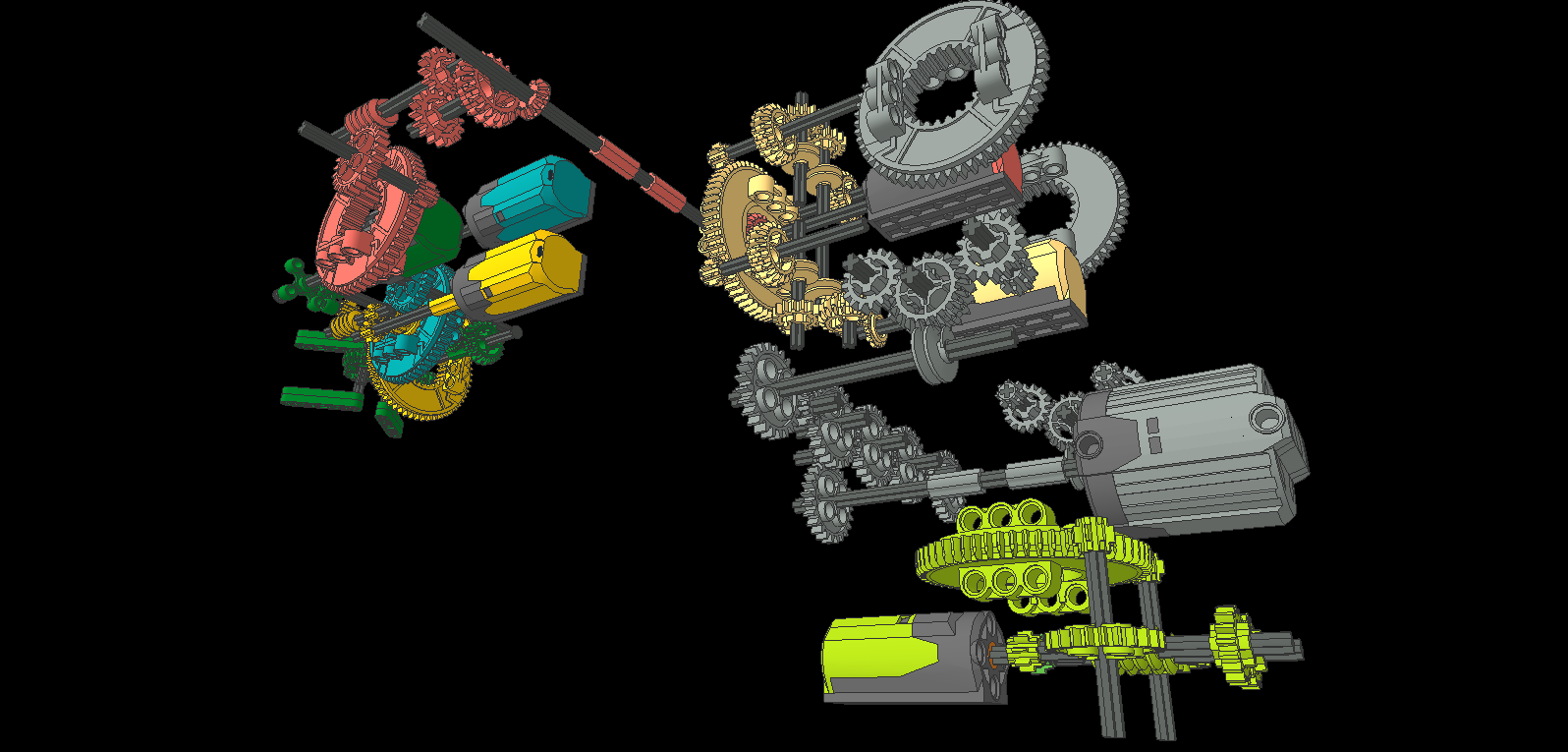
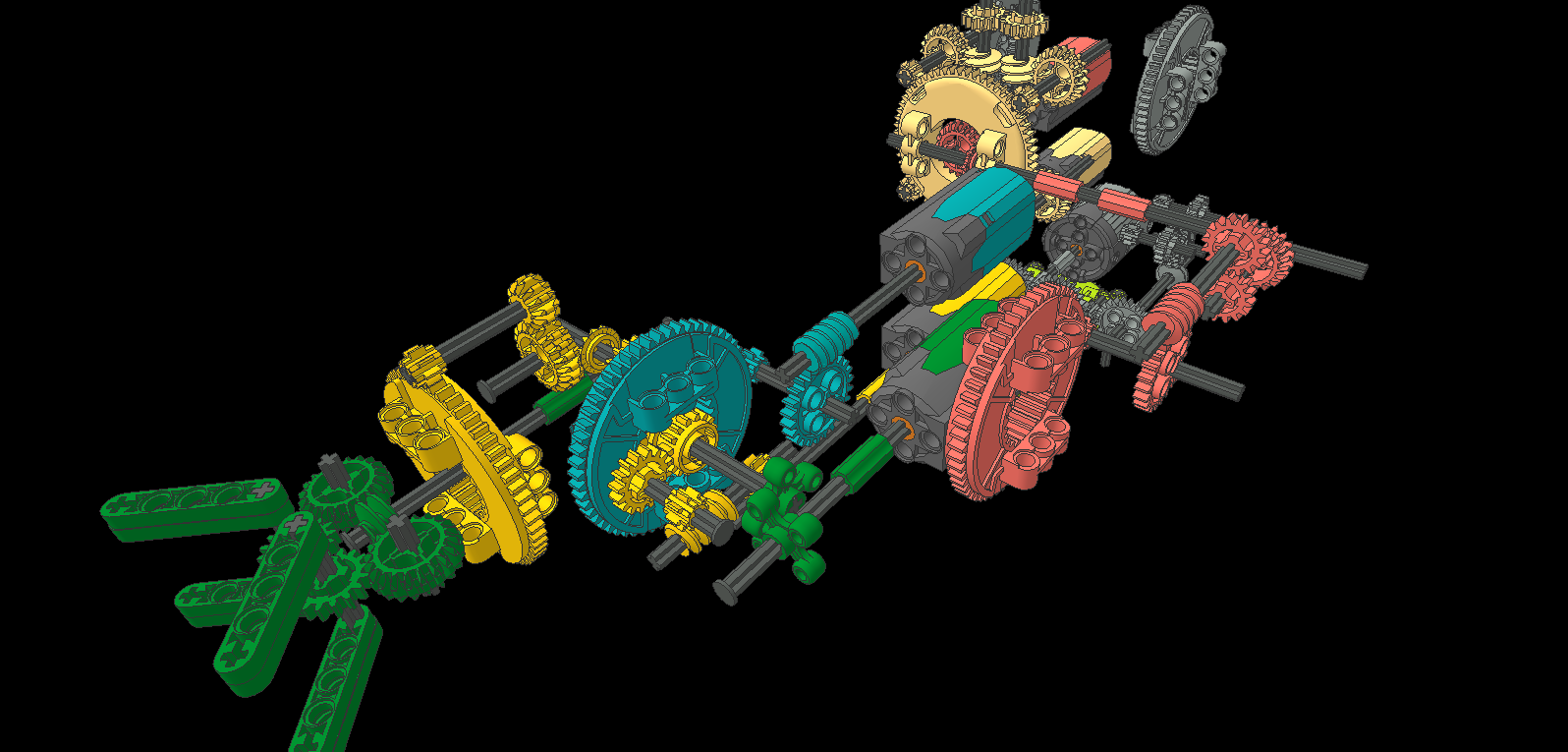
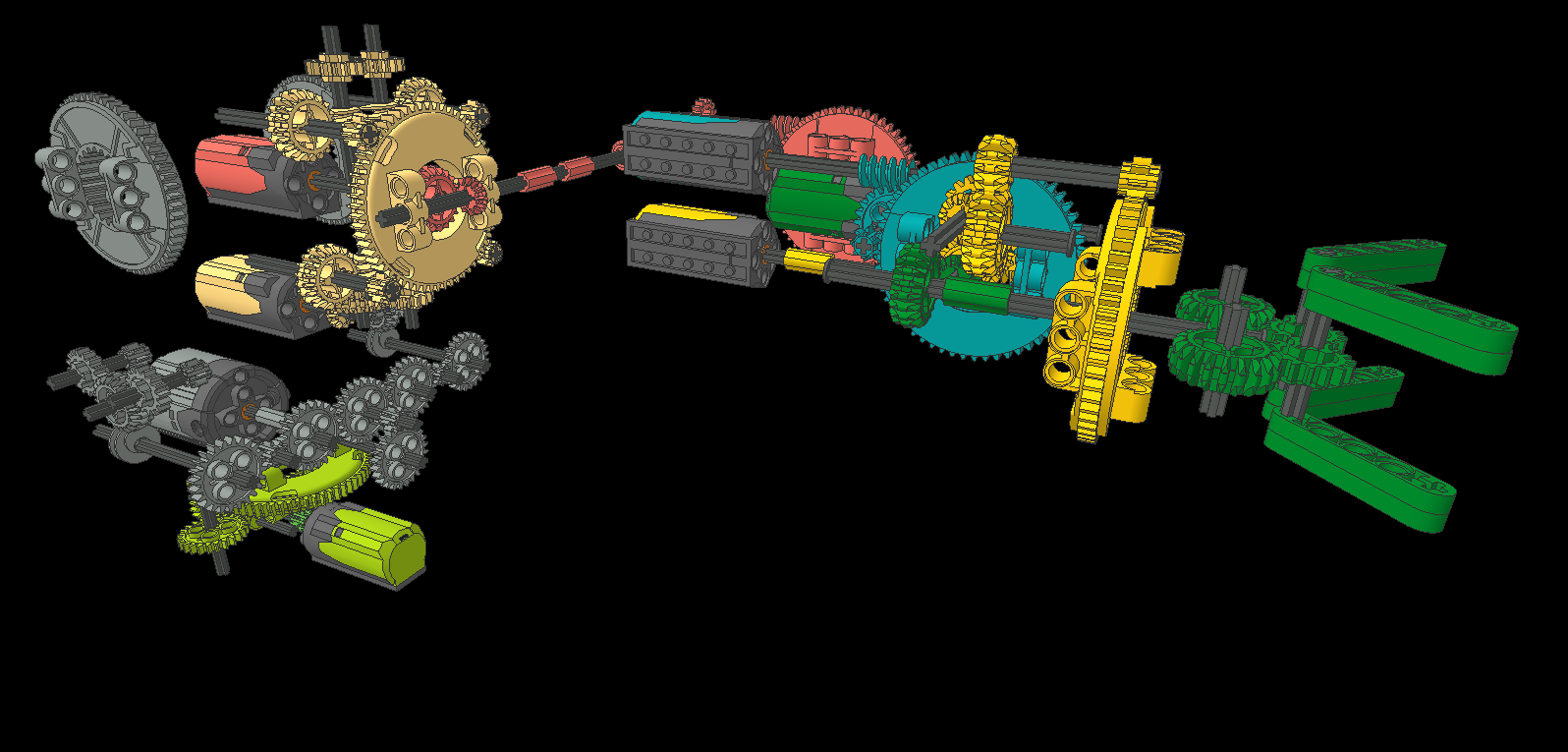
Wieża
Cała wieża działa w oparciu o pierścienie zębate, które odpowiadają za ruch ramienia góra-dół i wokół podstawy. Cały robot wykorzystuje silniki M, ale do podnoszenia musiałem użyć silnika XL, aby prędkość nie odbiegała od pozostałych funkcji. Natomiast obrót całości na podstawie wykonuje już silnik M. W celu pozbycia się efektu szarpania przekładnia działa w oparciu o dwa ślimaki.


Robot powstał w kilka dni i jestem z niego zadowolony. Szczególnie zależało mi na możliwych zakresach ruchu i na ich prędkości, by coś nie było za szybko ani za wolno.



Z uwagi na długi czas, film podzieliłem na dwie części. Pierwszy prezentuje robota, a drugi pokazuje test, czyli operowanie chwytakiem wokół siebie nakładając zębatkę na oś. Zapraszam do obejrzenia filmów i wyrażenia swojej opinii :)
[youtube]https://www.youtube.com/watch?v=mFtDiLB ... e=youtu.be[/youtube]
Dane techniczne
6 silników M
1 silnik XL
4 wieże IR
1 bateria
Robot posiada 6 ruchów plus chwyt. Jest umieszczony na podstawie i ma zasięg w promieniu ok. 43 cm.

Chwyt
Zaczynając budowę od tego elementu zależało mi na pewnej charakterystyce ruchu, czyli równoległym dociskaniu. Ważne też było, aby chwyt nie był zbyt mały. Niestety pozostała wada, czyli ruch do przodu podczas zamykania. Chwyt jest zabezpieczony nowym sprzęgłem liniowym.
Ramię
Chwytak jest połączony z ramieniem, które porusza się w czterech punktach na obrotnicach. Zwykle takie ramię jest proste i jednocześnie długie. Ja zdecydowałem się na kształt litery U, aby maksymalnie skrócić odległaść chwytaka do mocowania obrotnicy z wieżą przy zachowaniu pełnej ruchliwości.
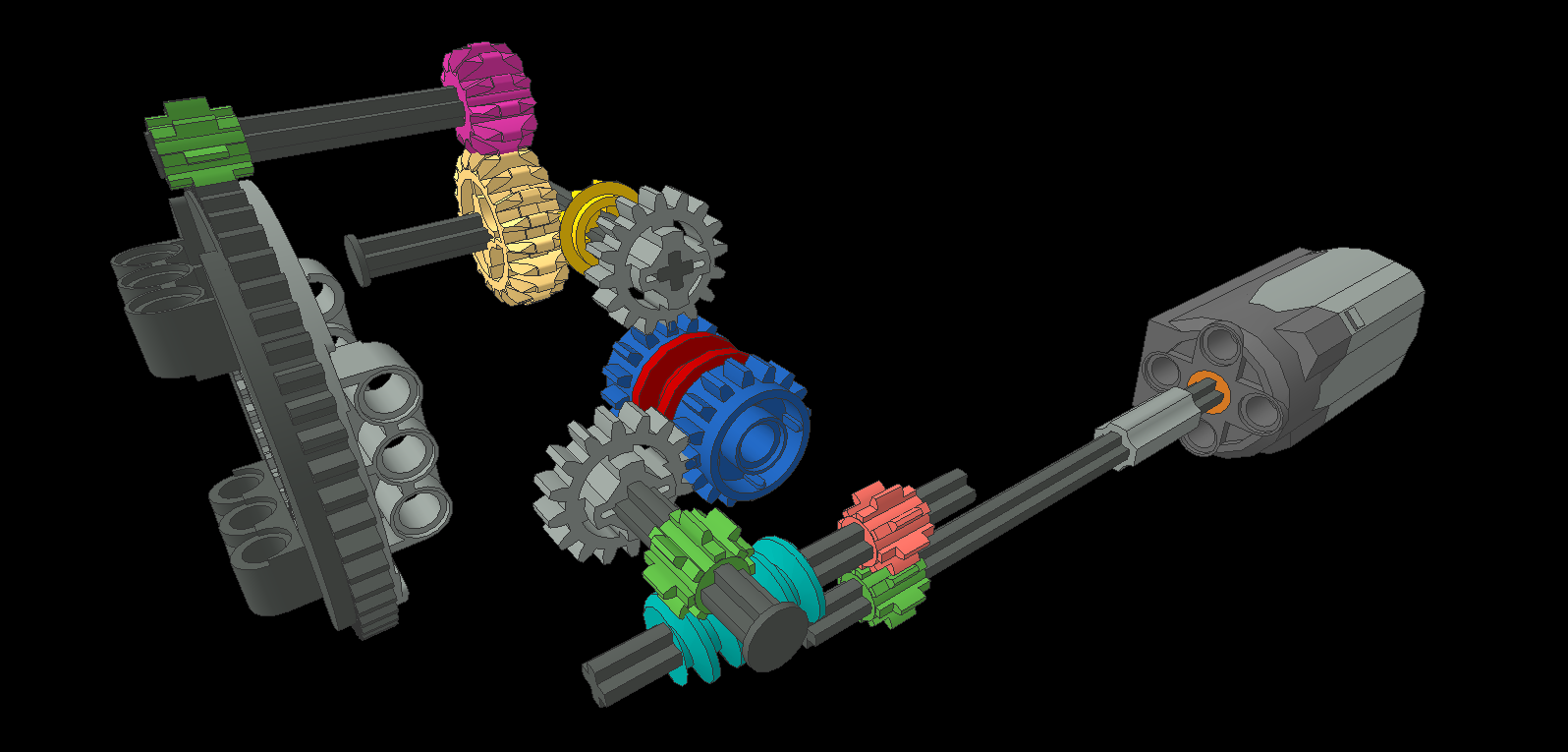
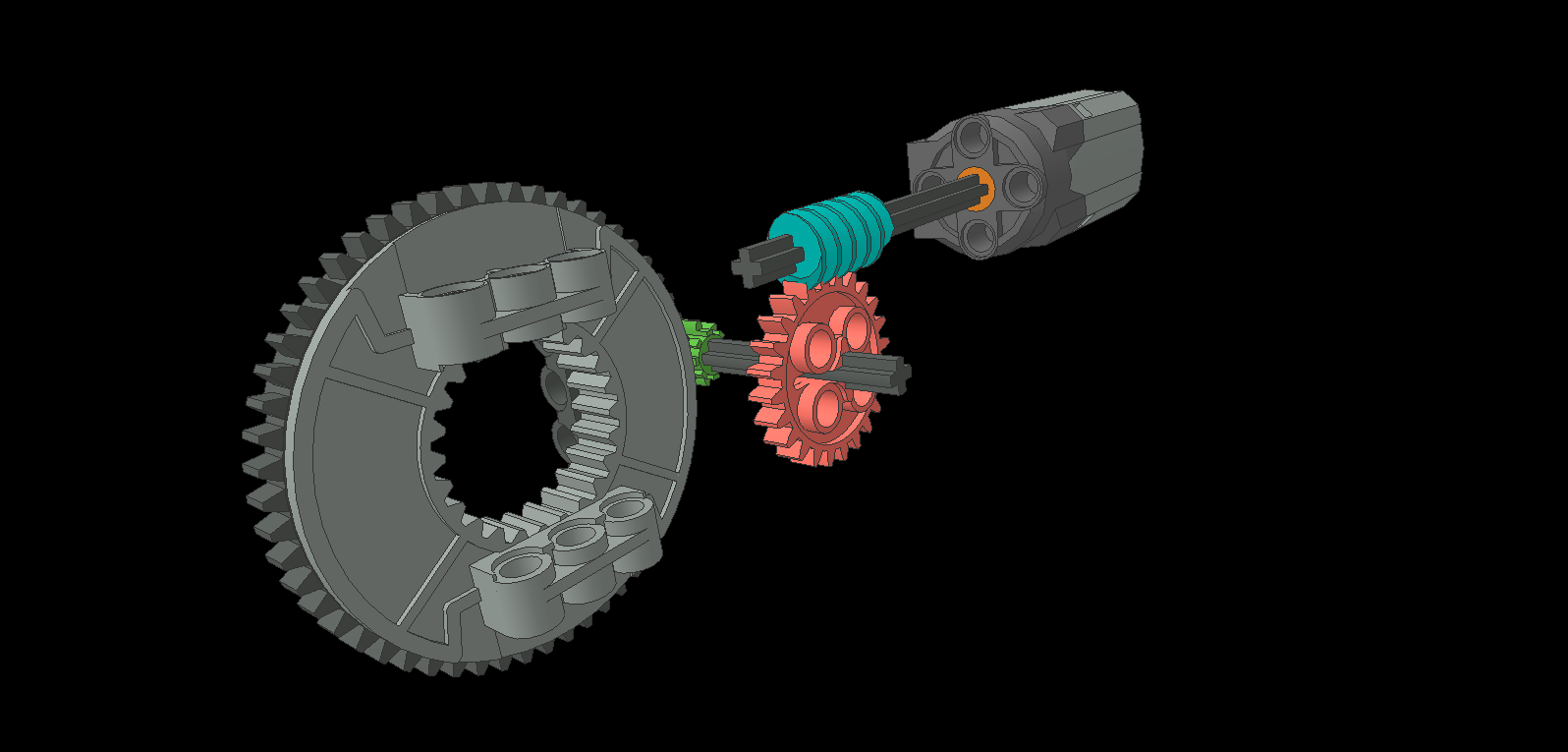


Wieża
Cała wieża działa w oparciu o pierścienie zębate, które odpowiadają za ruch ramienia góra-dół i wokół podstawy. Cały robot wykorzystuje silniki M, ale do podnoszenia musiałem użyć silnika XL, aby prędkość nie odbiegała od pozostałych funkcji. Natomiast obrót całości na podstawie wykonuje już silnik M. W celu pozbycia się efektu szarpania przekładnia działa w oparciu o dwa ślimaki.

Robot powstał w kilka dni i jestem z niego zadowolony. Szczególnie zależało mi na możliwych zakresach ruchu i na ich prędkości, by coś nie było za szybko ani za wolno.
Z uwagi na długi czas, film podzieliłem na dwie części. Pierwszy prezentuje robota, a drugi pokazuje test, czyli operowanie chwytakiem wokół siebie nakładając zębatkę na oś. Zapraszam do obejrzenia filmów i wyrażenia swojej opinii :)
[youtube]https://www.youtube.com/watch?v=mFtDiLB ... e=youtu.be[/youtube]
