[MOC] S Tank
: 2008-03-08, 16:03
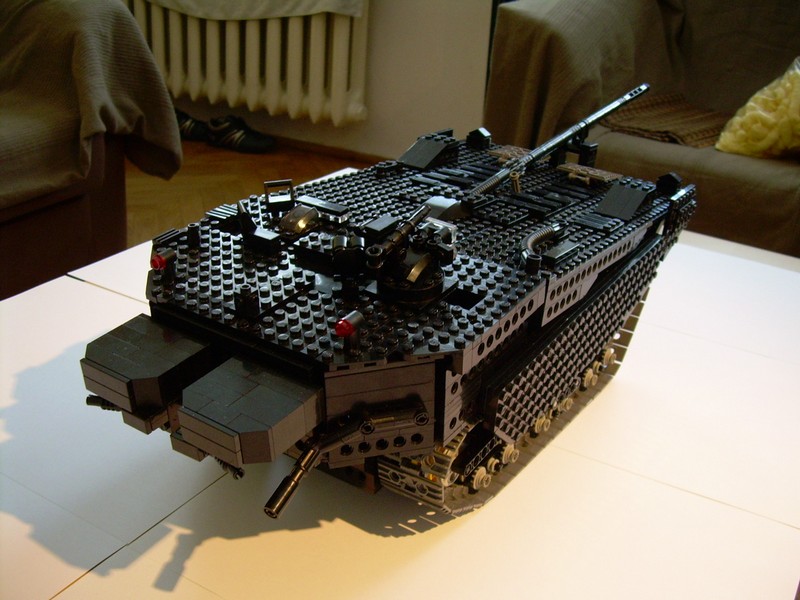
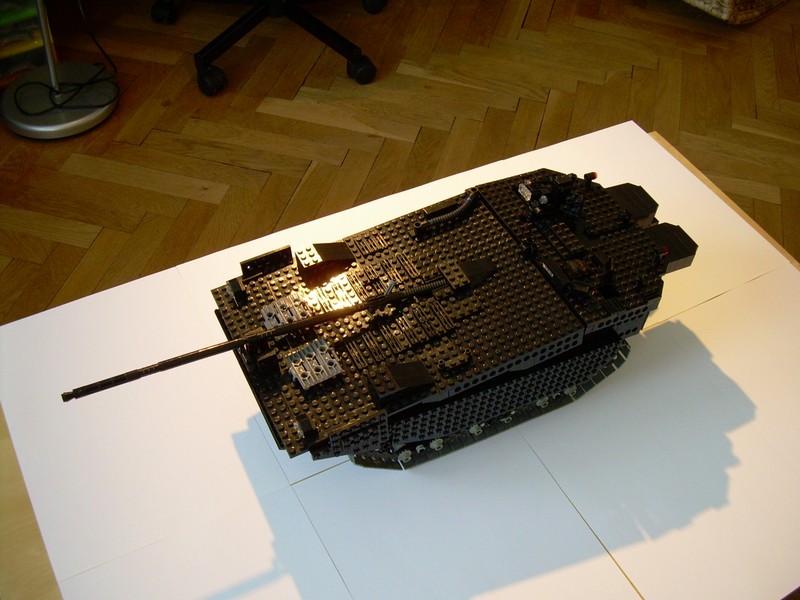
S Tank
Dane techniczne:
Waga: 2.0 kg
Wymiary: dł. 58s / szer. 25s / wys. 20s
Zawieszenie: pełne kolebkowe z pneumatycznym przechyłem
Napęd: silnik PF XL przez subtraktor, z redukcją 5:2
Skręt: silnik PF przez subtraktor, z redukcją 45:2
Pneumatyka: kompresor z zaworem automatycznym napędzany silnikiem PF do obsługi zawieszenia + obwód manualny do obsługi przedniego lemiesza
Inne: zdejmowane kurtny boczne, zdejmowane tylne zbiorniki, obracana wieżyczka dowódcy, ruchomy karabin dowódcy
Do budowy skłonił mnie [URL=http://www.00453005_0000002.pl/forum/viewtopic.php?t=5665]model Mrutka[/URL] opublikowany prawie miesiąc temu, który zwrócił moją uwagę na szwedzki czołg Stridsvagn 103 i jego niezwykłe właściwości. Nie będę się rozpisywał bo Internet aż pęka od informacji o tym czołgu, pokażę tylko to, co mnie zafascynowało najbardziej: niezwykła manewrowość, którą czołg zawdzięcza przekładni hydrostatycznej dzielącej napęd między gąsienice (dzieli go płynnie, pozwalając wykonywać skręty o zupełnie dowolnym promieniu) i hydropneumatyczne zawieszenie kontrolowane niezależnie dla wszystkich 8 kół jezdnych, pozwalające przechylać cały kadłub w zakresie przód/tył:
[youtube]http://youtube.com/watch?v=Vsz1rSQTAfA[/youtube]
[youtube]http://youtube.com/watch?v=_Bfts8BBnac[/youtube]
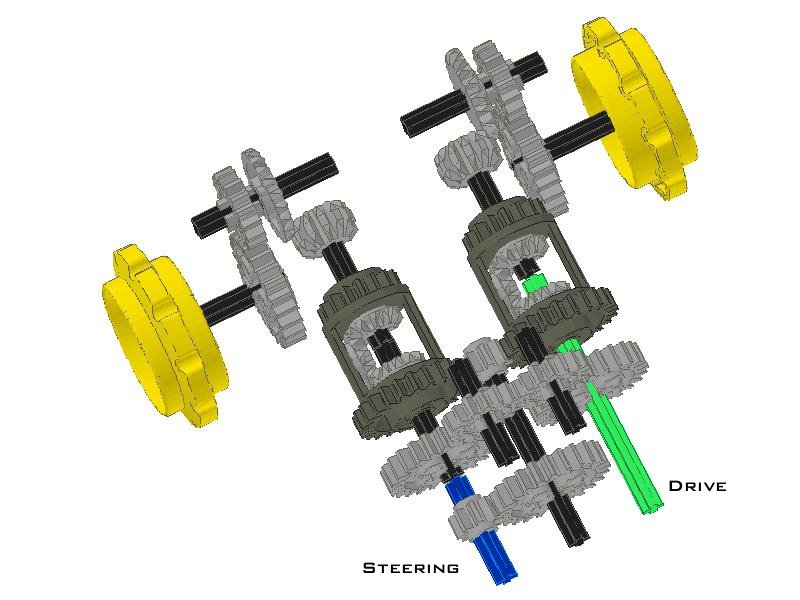
W moim modelu starałem się przede wszystkim oddać funkcjonalność oryginału, a dopiero na drugim miejscu jego wygląd. Ponieważ przekładni hydrostatycznej nie da się zbudować z klocków Lego (jest wypełniona płynem), użyłem zamiast niej subtraktora. Było to dość problematyczne, bo to duży i delikatny mechanizm (21 zębatek + 2 dyferencjały), ale przy odpowiednio gęstym spięciu całości liftarmami znosi jakoś moc silników PF, pozwalając na bardzo wygodne sterowanie. Co prawda w najbardziej narażonym na naprężenia miejscu zębatki z16 szlifują się na proszek, a axle pod nimi przesuwają się od naprężeń, ale możliwość skręcania po łuku wynagradza wszystko.
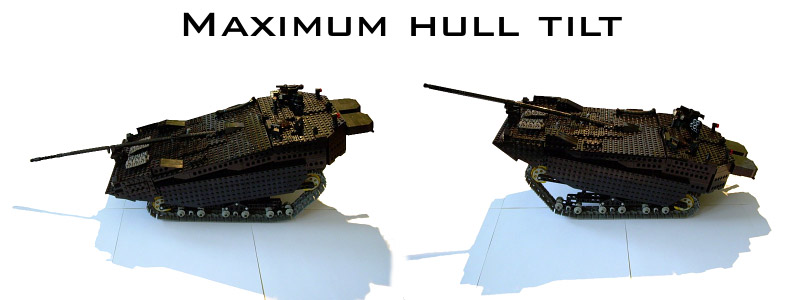
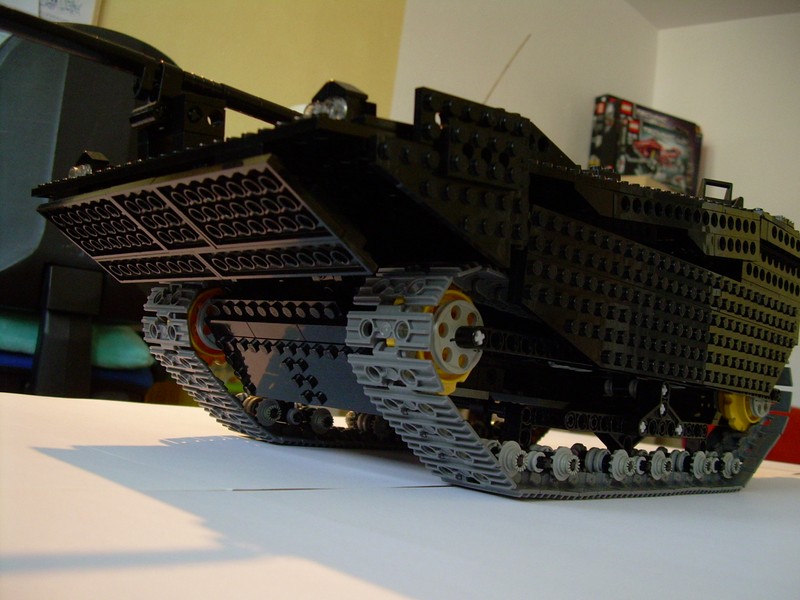
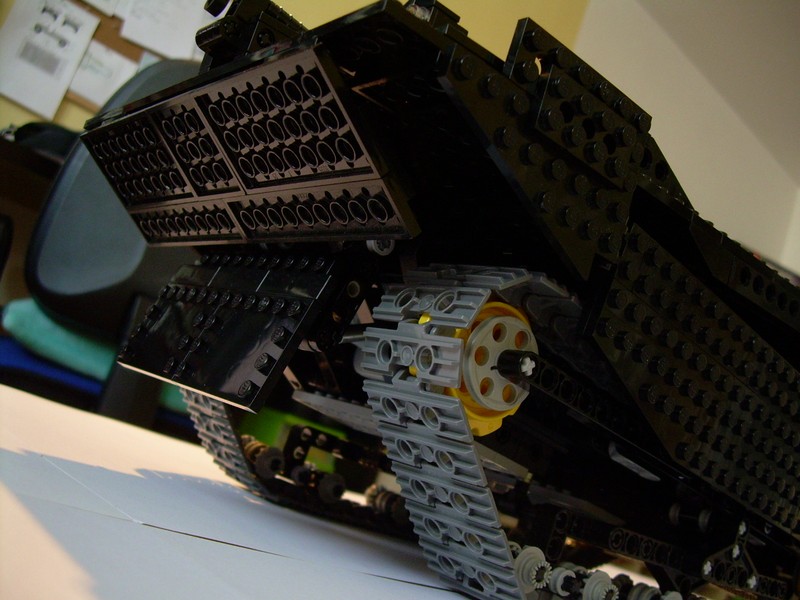
Tak jak w prawdziwym czołgu, kadłub daje się przechylać do przodu i tyłu. Pozwala na to konstrukcja zawieszenia gąsienic, w którym spód łączy się z górą centralnym zawiasem, i jest stabilizowany dwoma dużymi siłownikami pneumatycznymi. Siłowniki zasila kompresor z autozaworem, pozwalając na zdalną zmianę nachylenia kadłuba nawet w trakcie jazdy. Zakres przechylenia ograniczają tylko górne koła napinające:
Z tą funkcją wiązało się najwięcej problemów. Początkowo próbowałem przechylać kadłub obracając axla w zawiasie centralnym, ale masa czołgu sprawiała że po prostu kiwał się na zawiasie skręcając axla. Przypiąłem więc spód gąsienic do kadłuba za pomocą elektrycznie opuszczanych dźwigni i to poprawiło stabilność czołgu, ale nawet najmniejsze luzy w mechanice dźwigni powodowały kiwanie się kadłuba. Rozwiązaniem okazała się pneumatyka, która użyta w miejscu dźwigni zapewnia niemal idealną stabilność. Niestety, pneumatyka Lego jest słaba, dlatego po dłuższym odcinku czołg ma tendencję do opadania tyłu, co wynika zapewne z usytuowania z tyłu kół napędowych, które przy jeździe do przodu ciągną tył czołgu w dół. Idealnym rozwiązaniem byłyby tu pewnie siłowniki śrubowe, w których nie ma żadnych luzów ani zmian ciśnienia, ale dopóki nie są dostępne kadłub potrzebuje małej korekty nachylenia co jakiś czas.
Do podstawowego układu pneumatycznego wymienionego powyżej dołączony jest drugi, zasilany z tego samego kompresora, ale wyposażony w zawór manualny. Pozwala on opuszczać lemiesz na przodzie czołgu. Ze względów czysto objętościowych nie mogłem przesunąć siłowników kontrolujących opuszczanie na sam przód kadłuba, dlatego lemiesz znajduje się niżej niż w oryginalnym Strv 103.


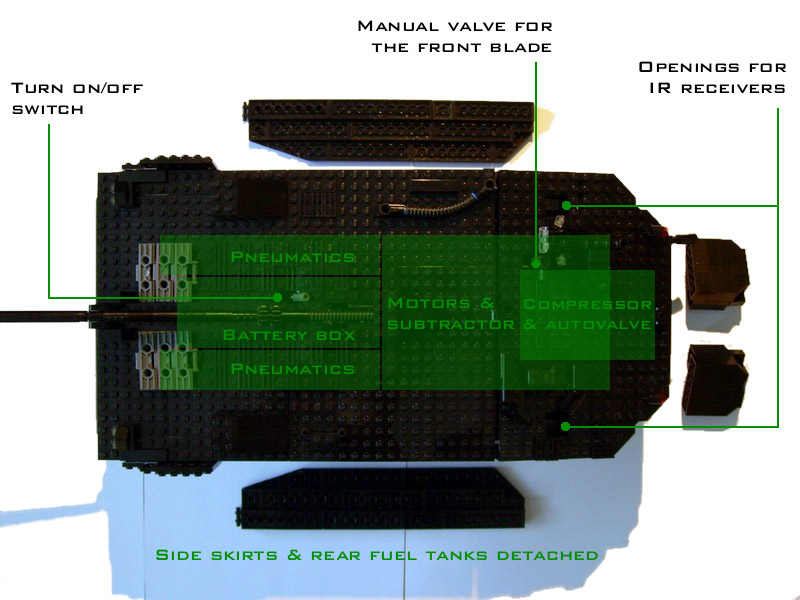
Do sterowania modelem służą 2 odbiorniki podczerwieni, których nie widać na zdjęciach. Oba mieszczą się całkowicie wewnątrz kadłuba, a sygnał dociera do nich przez wycięcia 2x2 study w górnym pokryciu. Mimo takiego osłonięcia odbiorników, czołg traci sygnał tylko jeśli skieruje się pilot w zupełnie inną stronę.
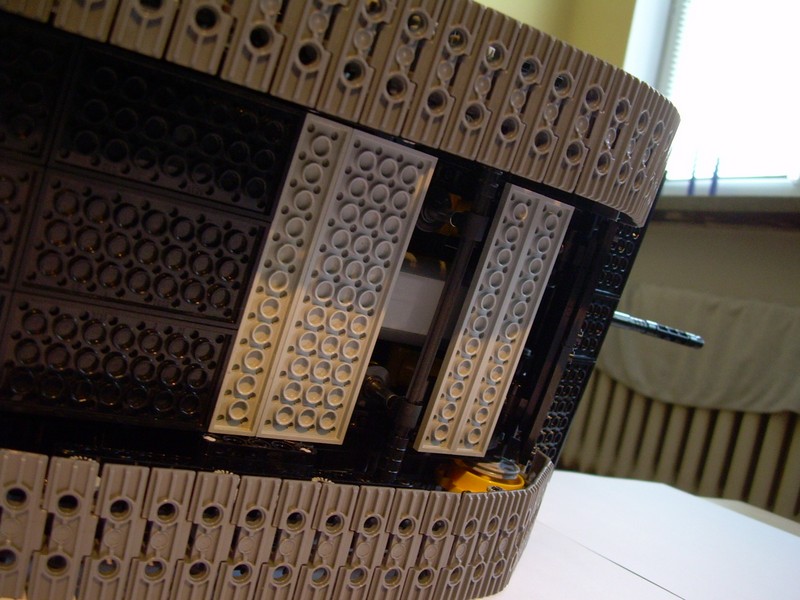
Model może wydawać się dość spory, ale połowę jego szerokości stanowią gąsienice i ściany boczne, wnętrze kadłuba ma tylko 12 studów szerokości. Upchnięcie tam trzech silników, battery boxa i całej mechaniki wymagało trochę wysiłku, i dało taki efekt:
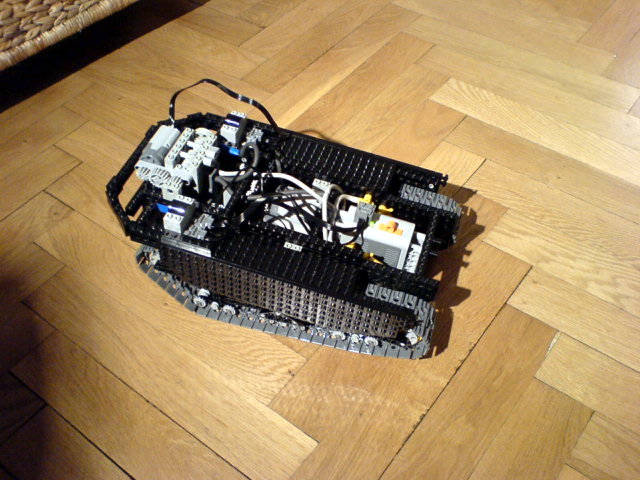
Tutaj widać jak wypełnione jest wnętrze kadłuba - choć obwód pneumatyczny lemiesza nie jest tu jeszcze w ogóle podłączony:
Model zamierzałem przetestować w terenie na pierwszej edycji GP Mazowsza, ale wyszedł cięższy niż się spodziewałem, i obawiam się o subtraktor. Wciąż męczy mnie myśl o pojechaniu w GP czymś gąsienicowym, ale żeby to był ten czołg musiałbym raczej usunąć z niego subtraktor i dać po jednym silniku PF XL na każdą gąsienicę, usztywnić zawieszenie oraz wzmocnić nadwozie na wypadek wywrotek. Mówiąc krócej, z powyższego modelu zostałyby gąsienice i część pokrycia, dlatego nie wiem czy zdecyduję się na taką przebudowę.
Generalnie spędziłem prawie miesiąc na jazdach testowych podwoziem, zmieniając je tak żeby jak najlepiej spisywało się w terenie, i uzyskując zdecydowanie najlepiej jeżdżący pojazd gąsienicowy jaki udało mi się dotąd zbudować - ale obawiam się że w ekstremalnych warunkach najsłabszym ogniwem mógłby okazać się subtraktor. Bardzo dobra jest za to przyczepność, podczas gdy buldożer 8275 na tych gąsienicach łatwo ślizga się podłodze z klepek, czołg będąc niewiele cięższym i wolniejszym nie ślizga się nigdy.
GALERIA ZDJĘĆ
Przykładowe zdjęcia:






Film pokazujący możliwości czołgu - nareszcie w wyższej jakości niż moje poprzednie filmy. Przymierzam się jeszcze do zmontowania filmu objaśniającego bliżej funkcje czołgu, ale to na pewno nie nastąpi dziś.
[youtube]http://youtube.com/watch?v=pzyxTFwgK_o[/youtube]
Podziękowania dla Duke'a za podzielenie się fachową wiedzą w konstrukcji zawieszeń gąsienicowych.
Dane techniczne:
Waga: 2.0 kg
Wymiary: dł. 58s / szer. 25s / wys. 20s
Zawieszenie: pełne kolebkowe z pneumatycznym przechyłem
Napęd: silnik PF XL przez subtraktor, z redukcją 5:2
Skręt: silnik PF przez subtraktor, z redukcją 45:2
Pneumatyka: kompresor z zaworem automatycznym napędzany silnikiem PF do obsługi zawieszenia + obwód manualny do obsługi przedniego lemiesza
Inne: zdejmowane kurtny boczne, zdejmowane tylne zbiorniki, obracana wieżyczka dowódcy, ruchomy karabin dowódcy
Do budowy skłonił mnie [URL=http://www.00453005_0000002.pl/forum/viewtopic.php?t=5665]model Mrutka[/URL] opublikowany prawie miesiąc temu, który zwrócił moją uwagę na szwedzki czołg Stridsvagn 103 i jego niezwykłe właściwości. Nie będę się rozpisywał bo Internet aż pęka od informacji o tym czołgu, pokażę tylko to, co mnie zafascynowało najbardziej: niezwykła manewrowość, którą czołg zawdzięcza przekładni hydrostatycznej dzielącej napęd między gąsienice (dzieli go płynnie, pozwalając wykonywać skręty o zupełnie dowolnym promieniu) i hydropneumatyczne zawieszenie kontrolowane niezależnie dla wszystkich 8 kół jezdnych, pozwalające przechylać cały kadłub w zakresie przód/tył:
[youtube]http://youtube.com/watch?v=Vsz1rSQTAfA[/youtube]
[youtube]http://youtube.com/watch?v=_Bfts8BBnac[/youtube]
W moim modelu starałem się przede wszystkim oddać funkcjonalność oryginału, a dopiero na drugim miejscu jego wygląd. Ponieważ przekładni hydrostatycznej nie da się zbudować z klocków Lego (jest wypełniona płynem), użyłem zamiast niej subtraktora. Było to dość problematyczne, bo to duży i delikatny mechanizm (21 zębatek + 2 dyferencjały), ale przy odpowiednio gęstym spięciu całości liftarmami znosi jakoś moc silników PF, pozwalając na bardzo wygodne sterowanie. Co prawda w najbardziej narażonym na naprężenia miejscu zębatki z16 szlifują się na proszek, a axle pod nimi przesuwają się od naprężeń, ale możliwość skręcania po łuku wynagradza wszystko.
Tak jak w prawdziwym czołgu, kadłub daje się przechylać do przodu i tyłu. Pozwala na to konstrukcja zawieszenia gąsienic, w którym spód łączy się z górą centralnym zawiasem, i jest stabilizowany dwoma dużymi siłownikami pneumatycznymi. Siłowniki zasila kompresor z autozaworem, pozwalając na zdalną zmianę nachylenia kadłuba nawet w trakcie jazdy. Zakres przechylenia ograniczają tylko górne koła napinające:
Z tą funkcją wiązało się najwięcej problemów. Początkowo próbowałem przechylać kadłub obracając axla w zawiasie centralnym, ale masa czołgu sprawiała że po prostu kiwał się na zawiasie skręcając axla. Przypiąłem więc spód gąsienic do kadłuba za pomocą elektrycznie opuszczanych dźwigni i to poprawiło stabilność czołgu, ale nawet najmniejsze luzy w mechanice dźwigni powodowały kiwanie się kadłuba. Rozwiązaniem okazała się pneumatyka, która użyta w miejscu dźwigni zapewnia niemal idealną stabilność. Niestety, pneumatyka Lego jest słaba, dlatego po dłuższym odcinku czołg ma tendencję do opadania tyłu, co wynika zapewne z usytuowania z tyłu kół napędowych, które przy jeździe do przodu ciągną tył czołgu w dół. Idealnym rozwiązaniem byłyby tu pewnie siłowniki śrubowe, w których nie ma żadnych luzów ani zmian ciśnienia, ale dopóki nie są dostępne kadłub potrzebuje małej korekty nachylenia co jakiś czas.
Do podstawowego układu pneumatycznego wymienionego powyżej dołączony jest drugi, zasilany z tego samego kompresora, ale wyposażony w zawór manualny. Pozwala on opuszczać lemiesz na przodzie czołgu. Ze względów czysto objętościowych nie mogłem przesunąć siłowników kontrolujących opuszczanie na sam przód kadłuba, dlatego lemiesz znajduje się niżej niż w oryginalnym Strv 103.
Do sterowania modelem służą 2 odbiorniki podczerwieni, których nie widać na zdjęciach. Oba mieszczą się całkowicie wewnątrz kadłuba, a sygnał dociera do nich przez wycięcia 2x2 study w górnym pokryciu. Mimo takiego osłonięcia odbiorników, czołg traci sygnał tylko jeśli skieruje się pilot w zupełnie inną stronę.
Model może wydawać się dość spory, ale połowę jego szerokości stanowią gąsienice i ściany boczne, wnętrze kadłuba ma tylko 12 studów szerokości. Upchnięcie tam trzech silników, battery boxa i całej mechaniki wymagało trochę wysiłku, i dało taki efekt:
Tutaj widać jak wypełnione jest wnętrze kadłuba - choć obwód pneumatyczny lemiesza nie jest tu jeszcze w ogóle podłączony:
Model zamierzałem przetestować w terenie na pierwszej edycji GP Mazowsza, ale wyszedł cięższy niż się spodziewałem, i obawiam się o subtraktor. Wciąż męczy mnie myśl o pojechaniu w GP czymś gąsienicowym, ale żeby to był ten czołg musiałbym raczej usunąć z niego subtraktor i dać po jednym silniku PF XL na każdą gąsienicę, usztywnić zawieszenie oraz wzmocnić nadwozie na wypadek wywrotek. Mówiąc krócej, z powyższego modelu zostałyby gąsienice i część pokrycia, dlatego nie wiem czy zdecyduję się na taką przebudowę.
Generalnie spędziłem prawie miesiąc na jazdach testowych podwoziem, zmieniając je tak żeby jak najlepiej spisywało się w terenie, i uzyskując zdecydowanie najlepiej jeżdżący pojazd gąsienicowy jaki udało mi się dotąd zbudować - ale obawiam się że w ekstremalnych warunkach najsłabszym ogniwem mógłby okazać się subtraktor. Bardzo dobra jest za to przyczepność, podczas gdy buldożer 8275 na tych gąsienicach łatwo ślizga się podłodze z klepek, czołg będąc niewiele cięższym i wolniejszym nie ślizga się nigdy.
GALERIA ZDJĘĆ
Przykładowe zdjęcia:





Film pokazujący możliwości czołgu - nareszcie w wyższej jakości niż moje poprzednie filmy. Przymierzam się jeszcze do zmontowania filmu objaśniającego bliżej funkcje czołgu, ale to na pewno nie nastąpi dziś.
[youtube]http://youtube.com/watch?v=pzyxTFwgK_o[/youtube]
Podziękowania dla Duke'a za podzielenie się fachową wiedzą w konstrukcji zawieszeń gąsienicowych.