[MOC] Telehandler Mk.2
: 2008-07-06, 20:15
Mój pierwszy telehandler miał cztery silniki, drugi ma już sześć:
Telehandler Mk.2

Dane techniczne:
Waga: 2.1 kg
Wymiary: dł. 54s (bez ramienia) / szer. 31s / wys. 21s
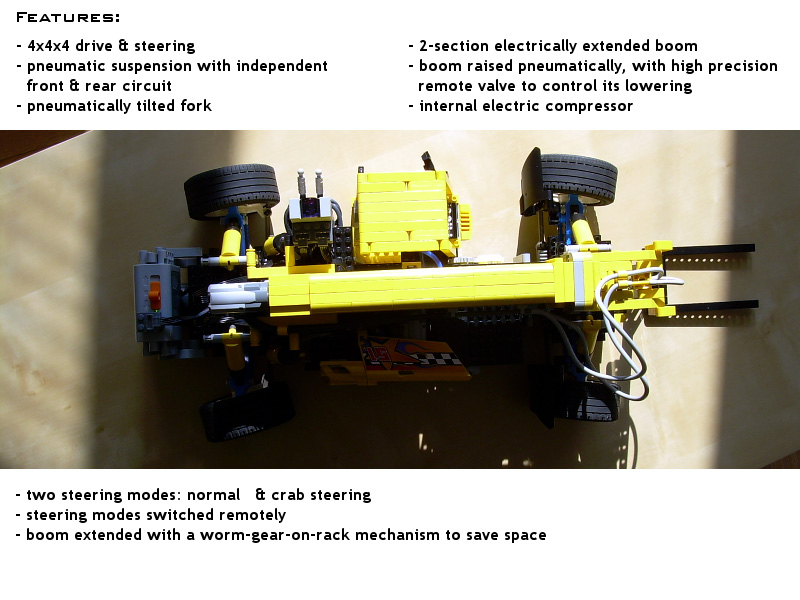
Zawieszenie: pełne pneumatyczne z niezależnym przednim i tylnym obwodem
Napęd: PF XL z redukcją 6:1
Skręt: PF Medium, dwa tryby: normalny i krabowy
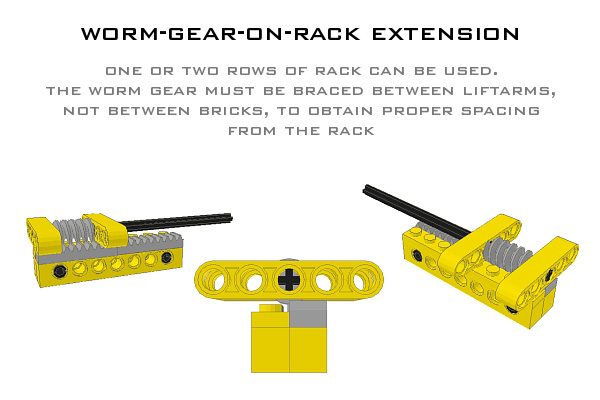
Bom: 2-sekcyjny, rozkładany silnikiem PF Medium z 49 studów (nie licząc wideł) do 75 studów, głowica z worm screwem bezpośrednio na rackach
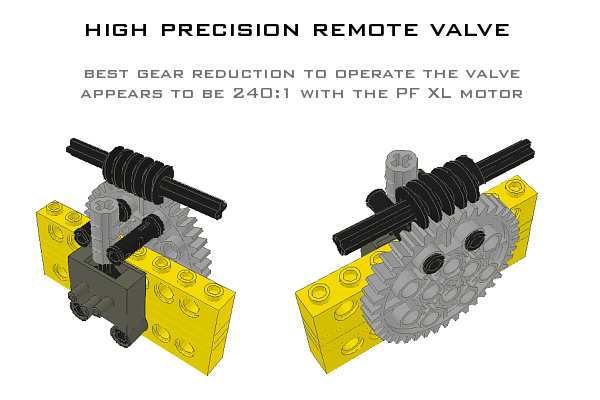
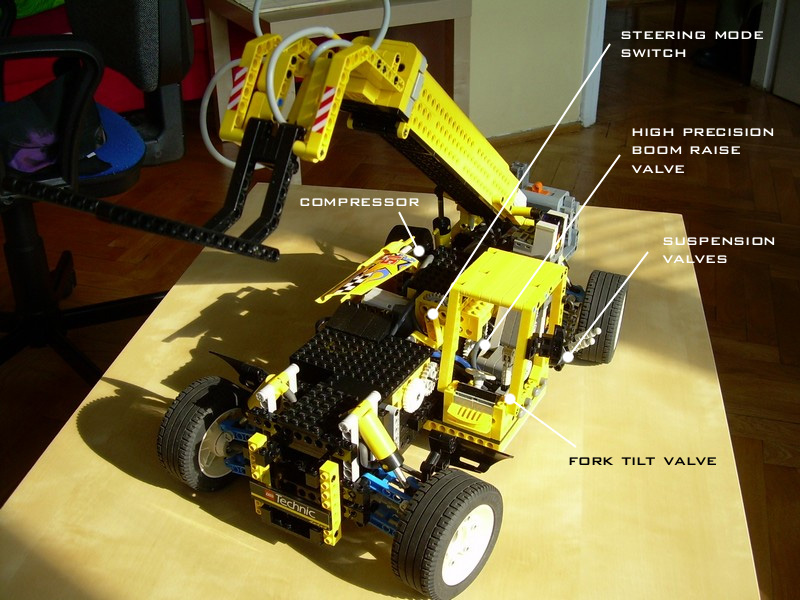
Inne: tryb skrętu przełączany silnikiem PF Medium, dwupompkowy kompresor napędzany PF Medium, podnoszenie bomu z zastosowaniem wysokoprecyzyjnego zdalnego zaworu przełączanego silnikiem PF XL
Pierwszy mój MOC, który pochłonął wszystkie moje silniki PF i przy okazji z połowę pneumatyki. Jak widzicie powyżej, jest napakowany funkcjami. Działanie można obejrzeć na filmie, opiszę tylko 3 nietypowe mechanizmy. Przede wszystkim bom ma tak niedużą głowicę z całą mechaniką schowaną w środku dzięki napędzaniu racków bezpośrednio worm screwem, bez żadnych pośredniczących zębatek. Takie rozwiązanie stosował już Makorol, wymaga ono umieszczenia worm screwa między liftarmami, bo tradycyjne belki nie pozwolą dostatecznie zbliżyć do niego racków. Wbrew moim obawom nie widać żadnego zużycia ani na ślimacznicy, ani na rackach.
Zawór wysokoprecyzyjny, to po prostu zawór pneumatyczny przełączany bardzo powoli i z dużą precyzją. Miałem zamiar zastosować do podnoszenia bomu zwykły autozawór, ale zdałem sobie sprawę że przełącza się on za szybko, i opuszczanie bomu będzie z nim wyglądało jak walenie cepem. Tak powstał poniższy mechanizm:
Trzeci mechanizm to przełącznik trybów skrętu. Mieści się między dwiema półosiami na wale skrętnym, i zamienia kierunek z jakim przekazywany jest obrót między nimi. Długo się zastanawiałem, czy nie użyć do tego prostego mechanizmu liniowej skrzyni biegów, albo ewentualnie driving ringa, ale pierwsze rozwiązanie niosło ryzyko problemów ze zdalnym zasprzęglaniem, a drugie wymagało zbyt dużo miejsca na wodzik. Stanęło na rozwiązaniu żywcem wziętym z mojej 2-biegowej skrzyni biegów przełączanej kierunkiem obrotów silnika:
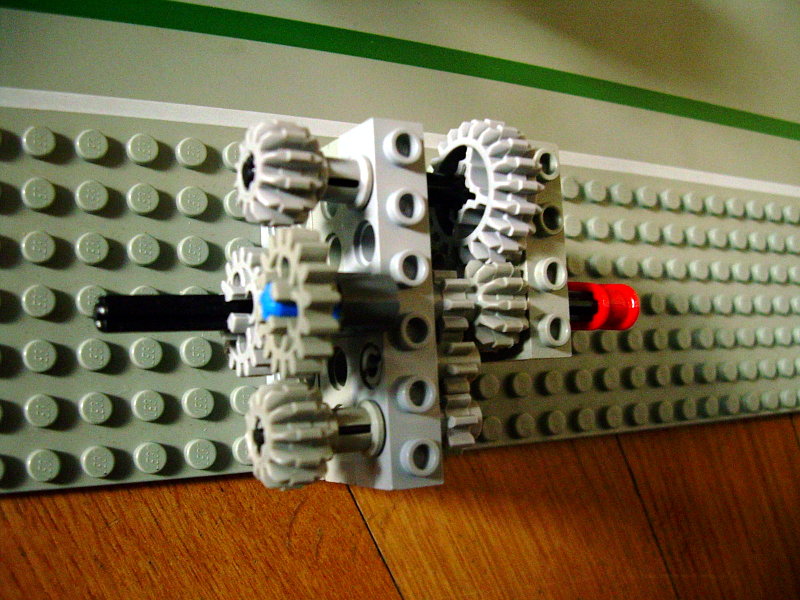
Nie jest to jednak najszczęśliwsze rozwiązanie, bo trudno je zdalnie zasprzęglić z taką siłą, żeby zębatki nigdy nie przeskakiwały.
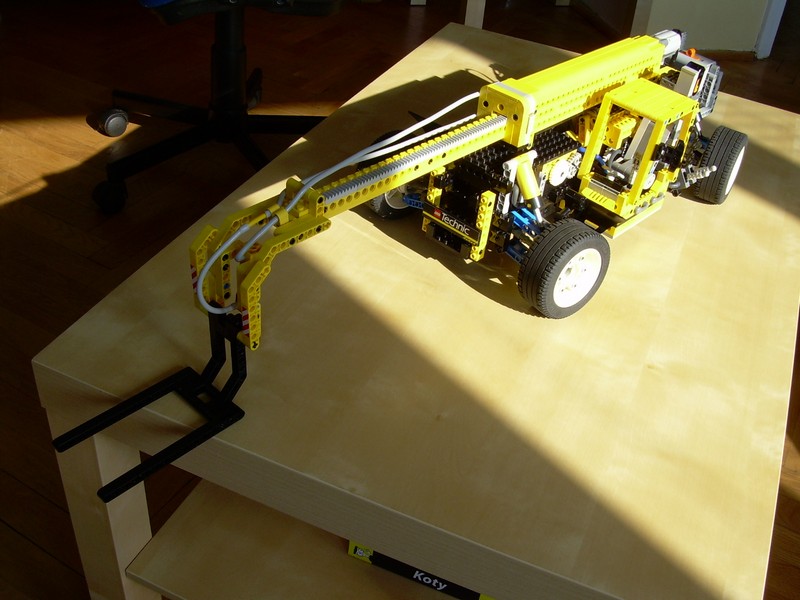
Reszta mechaniki jest raczej prosta. Zawieszenie z drobnymi modyfikacjami przeniesione z 8880, dzięki niezależnemu podnoszeniu przodu i tyłu telehandler nie potrzebuje przednich podpór:

Skrajne pozycje zawieszenia:


Generalnie sam nie jestem całkiem przekonany do tego MOCa. Widać co to jest, ma mnóstwo funkcji, ale nie udało mi się nadać mu ładniejszego wyglądu, i nie miałem zupełnie pomysłu jak rozwiązać kwestię nadmiaru przewodów pneumatycznych potrzebnych do wysunięcia bomu. W sumie - ot, jeszcze jeden przykład upychania mechaniki. No, może nie od razu dojdziecie z czego jest zrobione lusterko boczne ;)
GALERIA
Przykładowe zdjęcia:






Film:
[youtube]http://youtube.com/watch?v=I21ksqIWHgA[/youtube]
Telehandler Mk.2
Dane techniczne:
Waga: 2.1 kg
Wymiary: dł. 54s (bez ramienia) / szer. 31s / wys. 21s
Zawieszenie: pełne pneumatyczne z niezależnym przednim i tylnym obwodem
Napęd: PF XL z redukcją 6:1
Skręt: PF Medium, dwa tryby: normalny i krabowy
Bom: 2-sekcyjny, rozkładany silnikiem PF Medium z 49 studów (nie licząc wideł) do 75 studów, głowica z worm screwem bezpośrednio na rackach
Inne: tryb skrętu przełączany silnikiem PF Medium, dwupompkowy kompresor napędzany PF Medium, podnoszenie bomu z zastosowaniem wysokoprecyzyjnego zdalnego zaworu przełączanego silnikiem PF XL
Pierwszy mój MOC, który pochłonął wszystkie moje silniki PF i przy okazji z połowę pneumatyki. Jak widzicie powyżej, jest napakowany funkcjami. Działanie można obejrzeć na filmie, opiszę tylko 3 nietypowe mechanizmy. Przede wszystkim bom ma tak niedużą głowicę z całą mechaniką schowaną w środku dzięki napędzaniu racków bezpośrednio worm screwem, bez żadnych pośredniczących zębatek. Takie rozwiązanie stosował już Makorol, wymaga ono umieszczenia worm screwa między liftarmami, bo tradycyjne belki nie pozwolą dostatecznie zbliżyć do niego racków. Wbrew moim obawom nie widać żadnego zużycia ani na ślimacznicy, ani na rackach.
Zawór wysokoprecyzyjny, to po prostu zawór pneumatyczny przełączany bardzo powoli i z dużą precyzją. Miałem zamiar zastosować do podnoszenia bomu zwykły autozawór, ale zdałem sobie sprawę że przełącza się on za szybko, i opuszczanie bomu będzie z nim wyglądało jak walenie cepem. Tak powstał poniższy mechanizm:
Trzeci mechanizm to przełącznik trybów skrętu. Mieści się między dwiema półosiami na wale skrętnym, i zamienia kierunek z jakim przekazywany jest obrót między nimi. Długo się zastanawiałem, czy nie użyć do tego prostego mechanizmu liniowej skrzyni biegów, albo ewentualnie driving ringa, ale pierwsze rozwiązanie niosło ryzyko problemów ze zdalnym zasprzęglaniem, a drugie wymagało zbyt dużo miejsca na wodzik. Stanęło na rozwiązaniu żywcem wziętym z mojej 2-biegowej skrzyni biegów przełączanej kierunkiem obrotów silnika:
Nie jest to jednak najszczęśliwsze rozwiązanie, bo trudno je zdalnie zasprzęglić z taką siłą, żeby zębatki nigdy nie przeskakiwały.
Reszta mechaniki jest raczej prosta. Zawieszenie z drobnymi modyfikacjami przeniesione z 8880, dzięki niezależnemu podnoszeniu przodu i tyłu telehandler nie potrzebuje przednich podpór:
Skrajne pozycje zawieszenia:


Generalnie sam nie jestem całkiem przekonany do tego MOCa. Widać co to jest, ma mnóstwo funkcji, ale nie udało mi się nadać mu ładniejszego wyglądu, i nie miałem zupełnie pomysłu jak rozwiązać kwestię nadmiaru przewodów pneumatycznych potrzebnych do wysunięcia bomu. W sumie - ot, jeszcze jeden przykład upychania mechaniki. No, może nie od razu dojdziecie z czego jest zrobione lusterko boczne ;)
GALERIA
Przykładowe zdjęcia:



Film:
[youtube]http://youtube.com/watch?v=I21ksqIWHgA[/youtube]