[MOC] Moon Rover
: 2008-07-27, 14:35
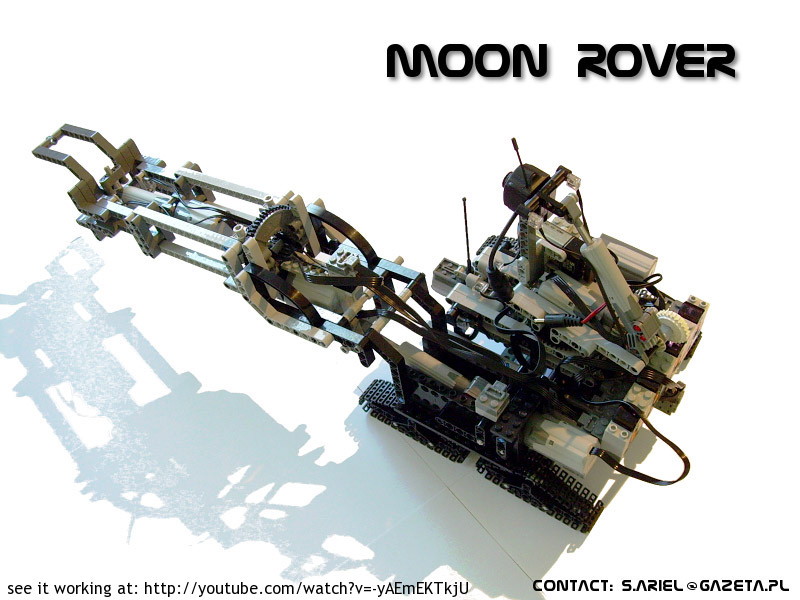
Moon Rover
Dane techniczne:
Waga: 1.35 kg
Zawieszenie: 4 kolebkowe wózki, każdy z własną gąsienicą
Napęd: 2 x PF Medium po jednym na dwa wózki
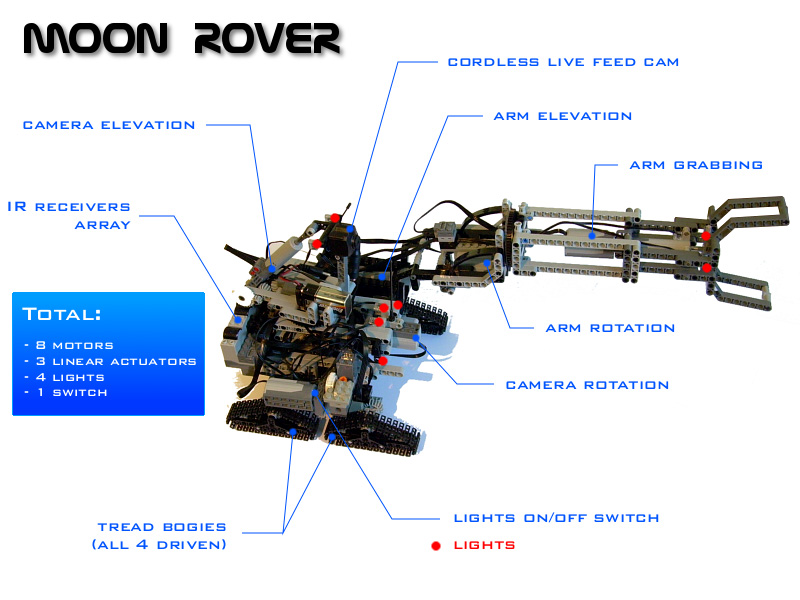
Inne: obrót kamery silnikiem PF Medium, nachylenie kamery silnikiem PF Medium, włączanie świateł silnikiem PF Medium, podnoszenie ramienia silnikiem PF Medium, obrót ramienia silnikiem PF XL, zamykanie ramienia silnikiem PF Medium
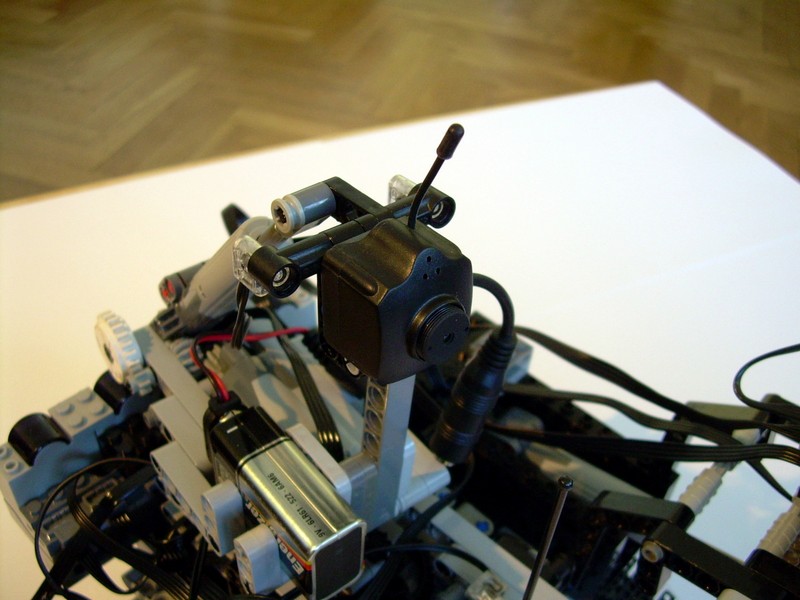
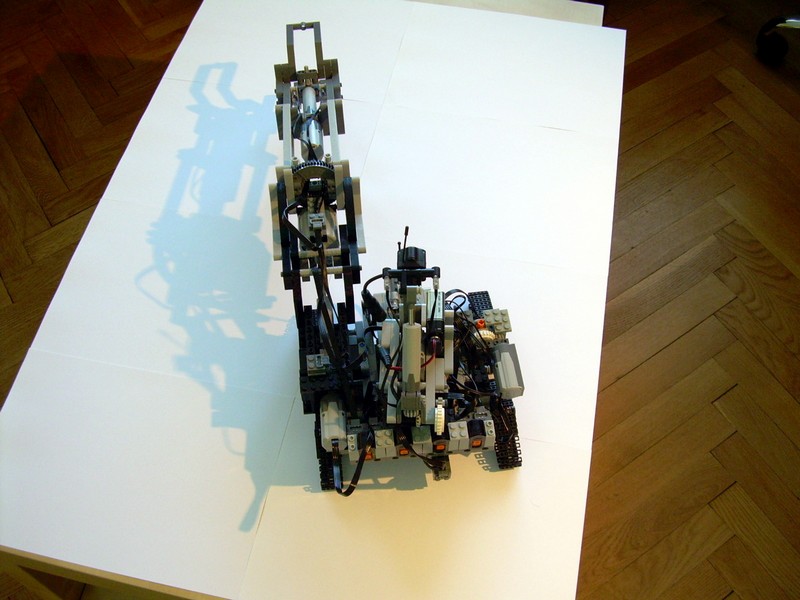
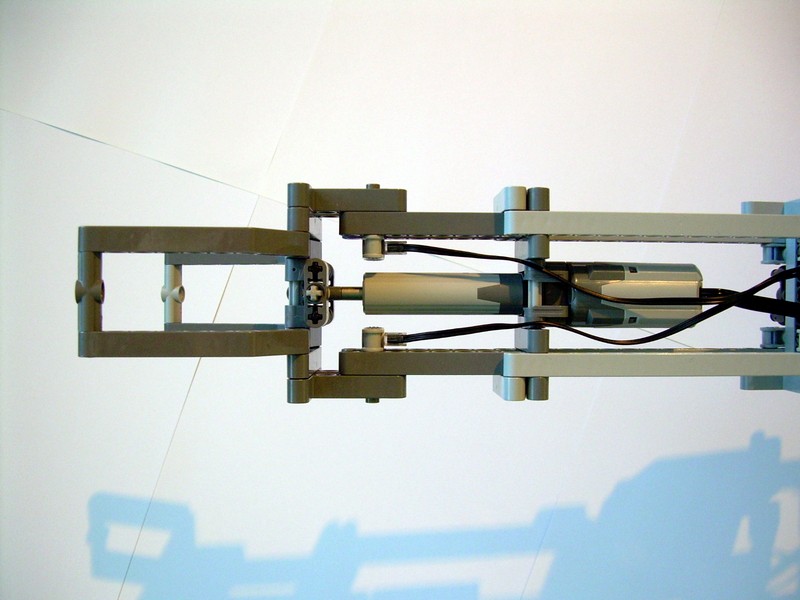
Przyszła pora przetestować siłowniki śrubowe - w tym MOCu są trzy. Od razu mówię że MOC zaboli estetów, bo jest czysto funkcjonalny, nie ma w nim nawet jednego klocka dodanego z myślą o estetyce, jak również purystów - ponieważ najistotniejsza część MOCa to kamera bezprzewodowa nie-Lego, w dodatku przyklejona na stałe do liftarma. Nie podoba się - protestujcie.
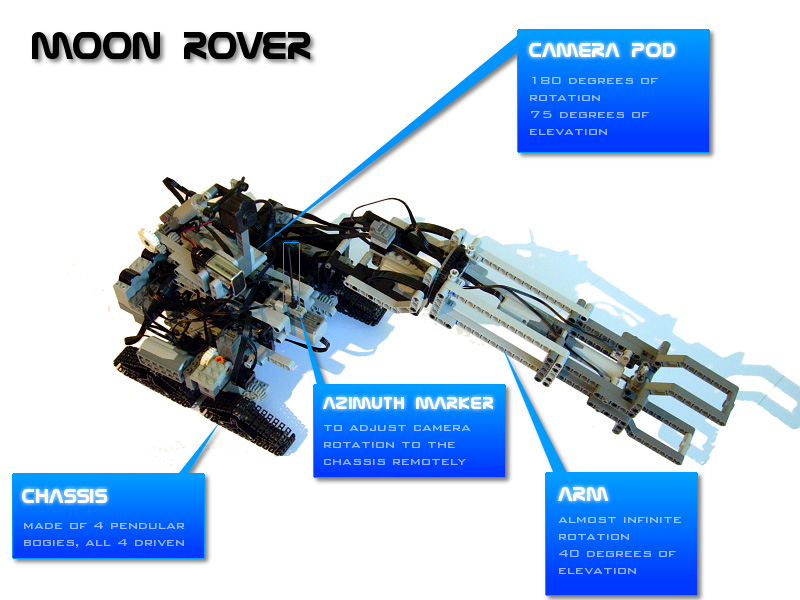
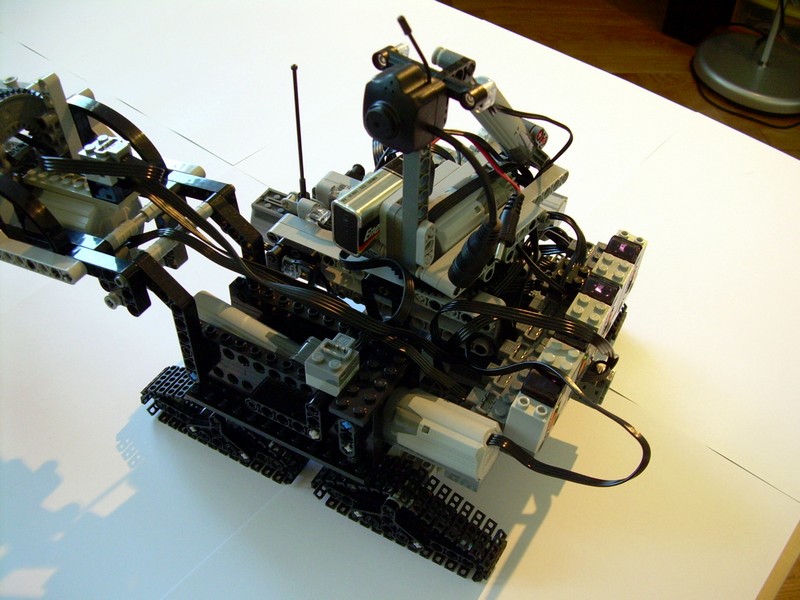
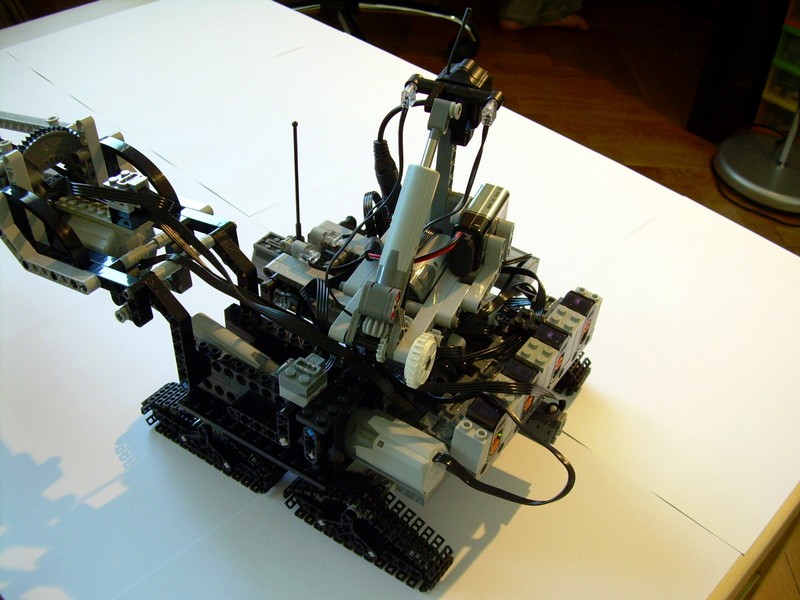
Krótko o funkcjach: ta paskudna, nieoryginalna i przyklejona kamera ma ok. 180 stopni obrotu w poziomie, i 75 w zakresie góra/dół. Antenka którą widać na przedzie łazika, to azymutowy znacznik obrotu, czyli mówiąc prościej coś, co pozwala wycelować kamerę dokładnie do przodu. Ponieważ z kamery widać dobrze ramię, jest to proste, ale kiedy testowałem prototyp bez ramienia, w którym żadna część łazika nie była widoczna z kamery, robił się kłopot.
Podwozie to 4 proste wózki zawieszone kolebkowo, każdy napędzany. Wybrałem stare gąsienice bo są cichsze i powodują mniejsze wibracje od nowych. Układ napędowy jest bardzo prosty, ale do jeżdżenia po podłodze sprawdza się świetnie. Wcześniejsze testy na nierównościach były zadowalające, choć wykazały problemy z podjeżdżaniem pod większe przeszkody - przednia para wózków radzi sobie z tym dobrze, ale tylna często utyka.
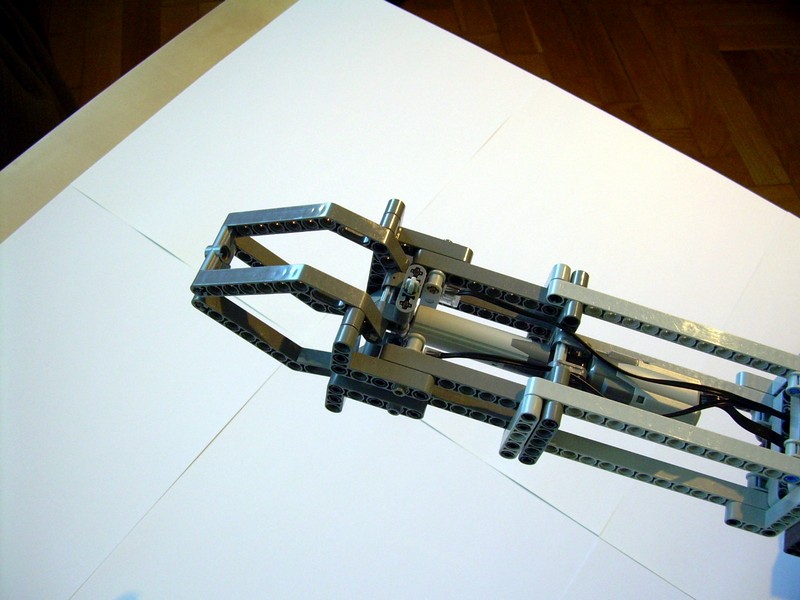
Ramię jest tak długie i wysunięte do przodu ze względu na kamerę. Po pierwsze, zależało mi żeby ramię było możliwie nisko i nie zasłaniało widoku z kamery na lewą stronę. Po drugie kamera ma mały kąt widzenia i lepiej widzi rzeczy bardziej oddalone. Samo ramię podnosi się siłownikiem śrubowym, ma prawie nieskończony zakres obrotu dzięki obrotnicy z kablami przeprowadzonymi przez środek, i zamyka się dzięki kolejnemu siłownikowi. Jego wagę równoważy battery box z tyłu podwozia. Oczywiście łazik jest przez nie nierówno obciążony, ale nie powoduje to większych problemów - tylko na długich prostych znosi go lekko w lewo. Udźwigu ramienia nie testowałem.
Po prawej stronie łazika znajduje się zdalny włącznik świateł, których dwie pary umieszczone są z przodu kadłuba, jedna za kamerą, a ostatnia na ramieniu. Najbardziej z tego zestawu przydają się te ostatnie światła, można nimi poruszać wraz z całym ramieniem, co pozwala oświetlić dość dokładnie wybrane miejsca.
Łazik ma budowę modułową, składa się z podwozia, nadwozia, ramienia i modułu włącznika świateł połaczonych niewielką ilością pinów. Estetyka i tak nie miała tu znaczenia, a takie rozwiązanie pozwoliło łatwo eksperymentować z ułożeniem poszczególnych modułów - np. nadwozie stopniowo cofałem, a ramię wysuwałem do przodu. Finalna konfiguracja wydaje mi się optymalna do pracy z ramieniem, można ją zmienić w ciągu paru minut.
Całością sterowałem sprzed komputera, na którego monitorze widziałem obraz z kamery na żywo - nieprzeciętne wrażenie, trudne do oddania filmikiem na YT. Marzy mi się zdalnie sterowana łódź podwodna z kamerą, ale to trudno wykonalne z klocków.
GALERIA
Wybrane zdjęcia:









Film. Długi, bo z nagraniem z kamery łazika, dla wytrwałych na końcu bonus - łazik przed lustrem.
[youtube]http://youtube.com/watch?v=-yAEmEKTkjU[/youtube]
Dane techniczne:
Waga: 1.35 kg
Zawieszenie: 4 kolebkowe wózki, każdy z własną gąsienicą
Napęd: 2 x PF Medium po jednym na dwa wózki
Inne: obrót kamery silnikiem PF Medium, nachylenie kamery silnikiem PF Medium, włączanie świateł silnikiem PF Medium, podnoszenie ramienia silnikiem PF Medium, obrót ramienia silnikiem PF XL, zamykanie ramienia silnikiem PF Medium
Przyszła pora przetestować siłowniki śrubowe - w tym MOCu są trzy. Od razu mówię że MOC zaboli estetów, bo jest czysto funkcjonalny, nie ma w nim nawet jednego klocka dodanego z myślą o estetyce, jak również purystów - ponieważ najistotniejsza część MOCa to kamera bezprzewodowa nie-Lego, w dodatku przyklejona na stałe do liftarma. Nie podoba się - protestujcie.
Krótko o funkcjach: ta paskudna, nieoryginalna i przyklejona kamera ma ok. 180 stopni obrotu w poziomie, i 75 w zakresie góra/dół. Antenka którą widać na przedzie łazika, to azymutowy znacznik obrotu, czyli mówiąc prościej coś, co pozwala wycelować kamerę dokładnie do przodu. Ponieważ z kamery widać dobrze ramię, jest to proste, ale kiedy testowałem prototyp bez ramienia, w którym żadna część łazika nie była widoczna z kamery, robił się kłopot.
Podwozie to 4 proste wózki zawieszone kolebkowo, każdy napędzany. Wybrałem stare gąsienice bo są cichsze i powodują mniejsze wibracje od nowych. Układ napędowy jest bardzo prosty, ale do jeżdżenia po podłodze sprawdza się świetnie. Wcześniejsze testy na nierównościach były zadowalające, choć wykazały problemy z podjeżdżaniem pod większe przeszkody - przednia para wózków radzi sobie z tym dobrze, ale tylna często utyka.
Ramię jest tak długie i wysunięte do przodu ze względu na kamerę. Po pierwsze, zależało mi żeby ramię było możliwie nisko i nie zasłaniało widoku z kamery na lewą stronę. Po drugie kamera ma mały kąt widzenia i lepiej widzi rzeczy bardziej oddalone. Samo ramię podnosi się siłownikiem śrubowym, ma prawie nieskończony zakres obrotu dzięki obrotnicy z kablami przeprowadzonymi przez środek, i zamyka się dzięki kolejnemu siłownikowi. Jego wagę równoważy battery box z tyłu podwozia. Oczywiście łazik jest przez nie nierówno obciążony, ale nie powoduje to większych problemów - tylko na długich prostych znosi go lekko w lewo. Udźwigu ramienia nie testowałem.
Po prawej stronie łazika znajduje się zdalny włącznik świateł, których dwie pary umieszczone są z przodu kadłuba, jedna za kamerą, a ostatnia na ramieniu. Najbardziej z tego zestawu przydają się te ostatnie światła, można nimi poruszać wraz z całym ramieniem, co pozwala oświetlić dość dokładnie wybrane miejsca.
Łazik ma budowę modułową, składa się z podwozia, nadwozia, ramienia i modułu włącznika świateł połaczonych niewielką ilością pinów. Estetyka i tak nie miała tu znaczenia, a takie rozwiązanie pozwoliło łatwo eksperymentować z ułożeniem poszczególnych modułów - np. nadwozie stopniowo cofałem, a ramię wysuwałem do przodu. Finalna konfiguracja wydaje mi się optymalna do pracy z ramieniem, można ją zmienić w ciągu paru minut.
Całością sterowałem sprzed komputera, na którego monitorze widziałem obraz z kamery na żywo - nieprzeciętne wrażenie, trudne do oddania filmikiem na YT. Marzy mi się zdalnie sterowana łódź podwodna z kamerą, ale to trudno wykonalne z klocków.
GALERIA
Wybrane zdjęcia:



Film. Długi, bo z nagraniem z kamery łazika, dla wytrwałych na końcu bonus - łazik przed lustrem.
[youtube]http://youtube.com/watch?v=-yAEmEKTkjU[/youtube]