[MOC] Tower Crane
: 2009-03-15, 17:44
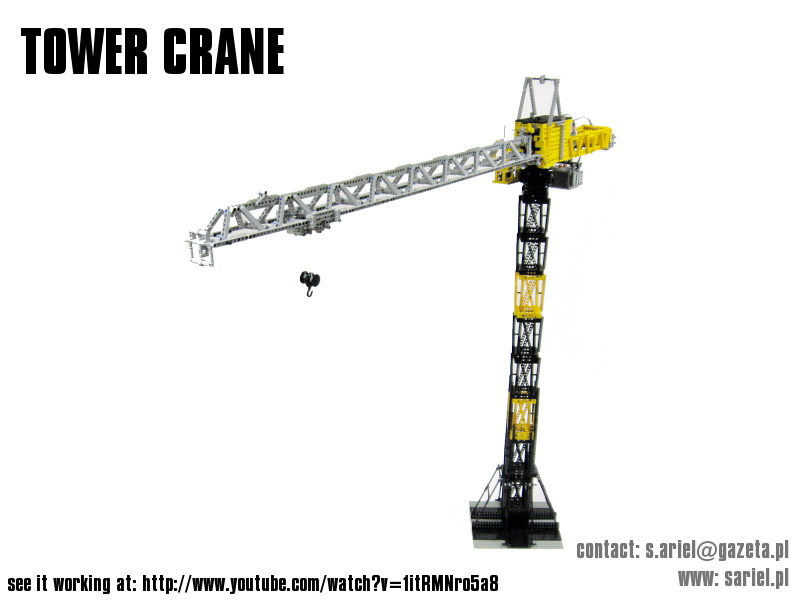
Tower Crane
Dane techniczne:
Waga: 2.98 kg
Wymiary: dł. 184s (147 cm) / szer. 19s (plus podstawa) / wys. 159s (127 cm)
Napęd: 1 x PF XL, 1 x PF Medium, 2 x 71427
Co to dużo mówić, klasyczny żuraw budowlany. W zamierzeniu miał być dość duży żeby przenosić ładunki z podłogi na biurko - i jest. Wygląda jak widać, opiszę w skrócie jego konstrukcję. Generalnie dopóki nie zacząłem budować, żuraw wydawał mi się raczej prostą konstrukcją. Teraz już tak nie uważam, a schemat typowego żurawia poniżej:

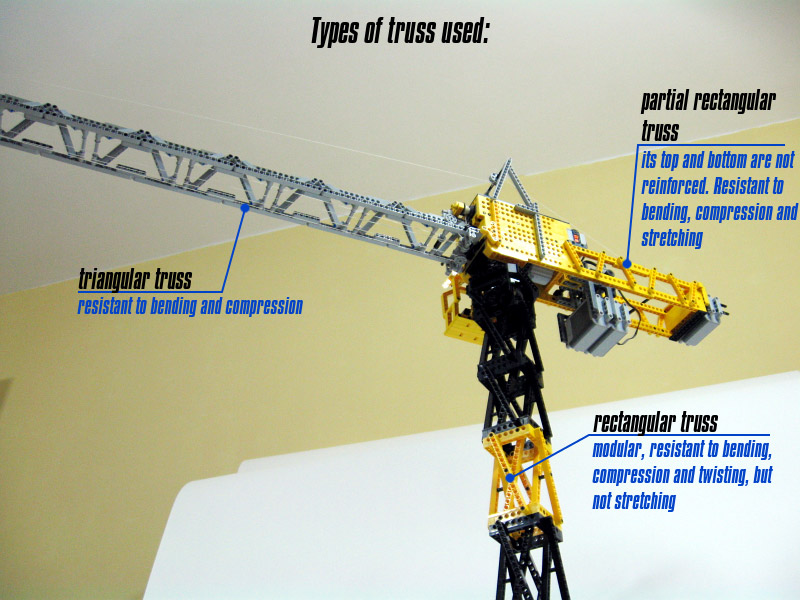
Jest to oczywiście dźwig kratownicowy, zbudowany z kratownic trzech różnych typów. Jestem raczej laikiem w kwestii kratownic, ale według mojego rozeznania każda kratownica może mieć do czynienia z czterema czynnikami: zginaniem, skręcaniem, ściskaniem i rozciąganiem. Ideałem byłoby używanie wyłącznie kratownic które są odporne na wszystkie cztery, ale takie kratownice są z zasady najcięższe i niekoniecznie spełniałyby dobrze swoją rolę. Żaden z użytych tutaj trzech typów nie jest odporny na wszystkie te czynniki. Po kolei:
- maszt główny to typowa kratownica prostokątna. W dolnej części otoczona zastrzałami i wzmocniona pionowymi liftarmami. Wyżej zabrakło mi liftarmów w tym kolorze odpowiedniej długości, a ponieważ maszt znosił bez nich takie obciążenie jakie chciałem, poprzestałem na tym. Esteci i tak będą narzekać, ale przynajmniej dźwig nie jest kolorystycznie zbyt łaciaty. Kratownica jest odporna na ściskanie, skręcanie i zginanie, ale nie na rozciąganie ponieważ składa się z modułów.
- tylny wysięgnik miał mieć puste miejsce w środku, więc powstał z niepełnej kratownicy prostokątnej, tzn. takiej która ma wzmocnione tylko dwa boki zamiast czterech. Jest odporna na wszystko oprócz skręcania.
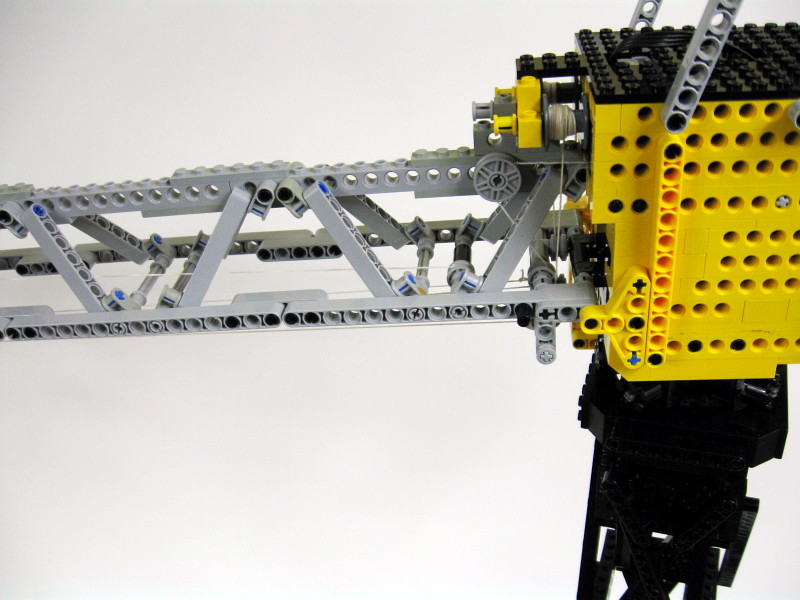
- przedni wysięgnik zbudowany jest z kratownicy trójkątnej. Jest ona sporo lżejsza od prostokątnej i łatwo dostosować ją do poruszającego się wózka z hakiem, a oferuje odporność na zginanie i ściskanie. Jest bardzo wrażliwa na skręcanie, ale nie ma z nim do czynienia, a przed rozciąganiem chroni ją odciąg dociskający ją do reszty konstrukcji.
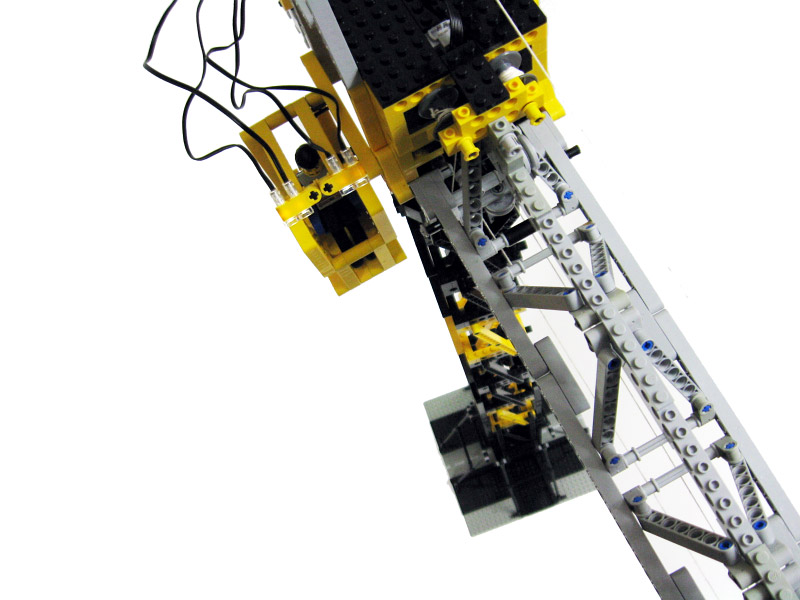
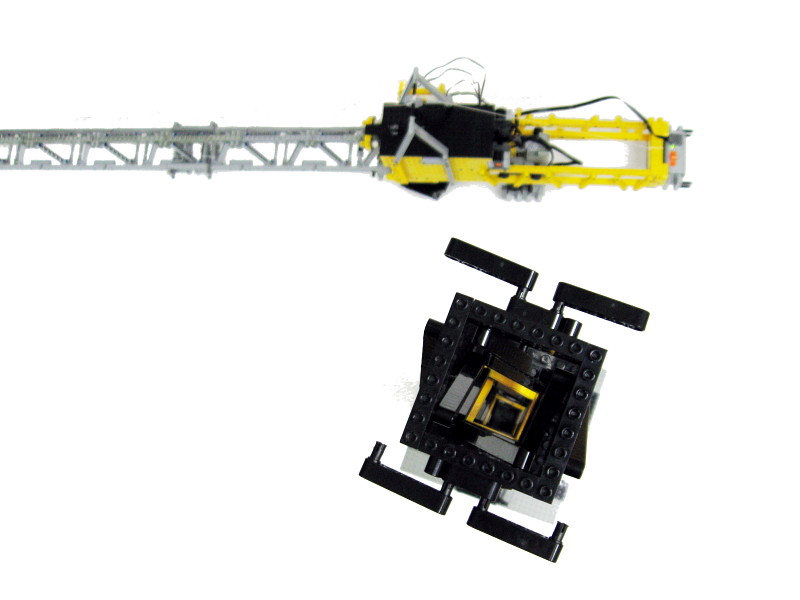
Cały dźwig daje się łatwo rozłożyć na trzy części: górne ramię wraz z obrotnicą, koronę obrotnicy, i maszt główny. Obrotnica ma dość nietypową konstrukcję: bazuje na standardowej obrotnicy Lego ze wzmocnieniem w postaci sześciu wałków w dwóch zespołach po trzy z przodu i z tyłu ramienia. Wałki są umieszczone kilka studów powyżej obrotnicy, i opierają się na koronie przez którą ona przechodzi, i z którą jest połączona. Jest to mój pierwszy poważny układ wzmocnienia obrotnicy i muszę powiedzieć że działa idealnie - zapewne głównie dzięki umieszczeniu wzmocnienia sporo powyżej obrotnicy.
Obrotnica Lego widoczna wewnątrz korony, nad koroną przednie 3 wałki. Uśmiech na twarzy pana Zdzisława podkreśla jak przyjemna jest praca na dźwigu

Sam dźwig nie obraca się jednak odpychając od obrotnicy. Po obejrzeniu dokładnie pięknego żurawia Thomasa Avery'ego wiedziałem że masa ramienia będzie miała tendencję do skręcania osi przenoszących obrót. Jednocześnie martwiło mnie, że długim wysięgnikiem dźwigu będzie szarpało przy włączaniu i wyłączaniu silnika obrotowego. Wtedy przypomniałem sobie o osiach 'szestkastkach' z Jumping Gianta, wykonanych z twardego ale elastycznego tworzywa. Dźwig obraca się odpychając się od takiej właśnie osi, zamocowanej na sztywno do spodu obrotnicy, a obrotowo do góry dźwigu. Dzięki elastyczności osi wysięgnik nie szarpie, ale obraca się z dużą bezwładnością - trochę komplikuje to sterowanie, ale jest do opanowania.
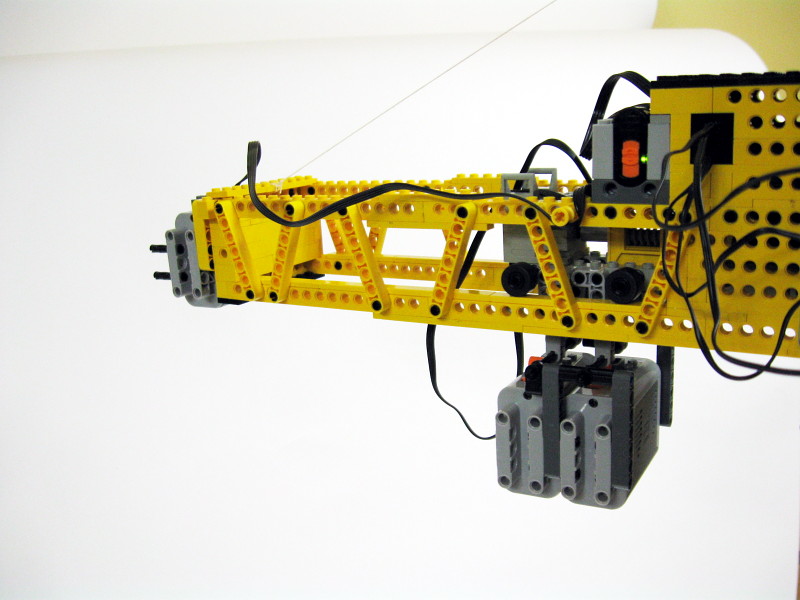
Z pozostałych rzeczy - na tylnym wysięgniku znajdują się dwie przeciwwagi, jedna stała na jego końcu, a druga ruchoma w jego wnętrzu. Ruchoma przeciwwaga jest moim prywatnym pomysłem, nie stosowanym o ile wiem w rzeczywistości, i liczyłem że zwiększy nośność dźwigu. Można nią poruszać zdalnie, jeździ na prostym wózeczku wewnątrz tylnego wysięgnika, z dwoma battery boxami podwieszonymi pod spodem. Początkowo miałem nawet pomysł żeby poruszać nią automatycznie przy użyciu odciągów: tzn. zamiast jednego odciągu łączącego przedni wysięgnik ze środkiem dźwigu i drugiego łączącego tylny, chciałem użyć jednego odciągu łączącego przód i tył, a tylko luźno przechodzącego przez środek. Liczyłem, że jeśli na środku podłączę pod odciąg oś i włożę ją do switcha, uda się doprowadzić do sytuacji kiedy przedni wysięgnik opadając pod obciążeniem będzie włączał przełącznik tak żeby przeciwwaga się cofnęła - i vice versa. W praktyce okazało się że przełącznik jest mało precyzyjny, a przemieszczenie przedniego wysięgnika względem środka dźwigu jest zbyt nieznaczne.
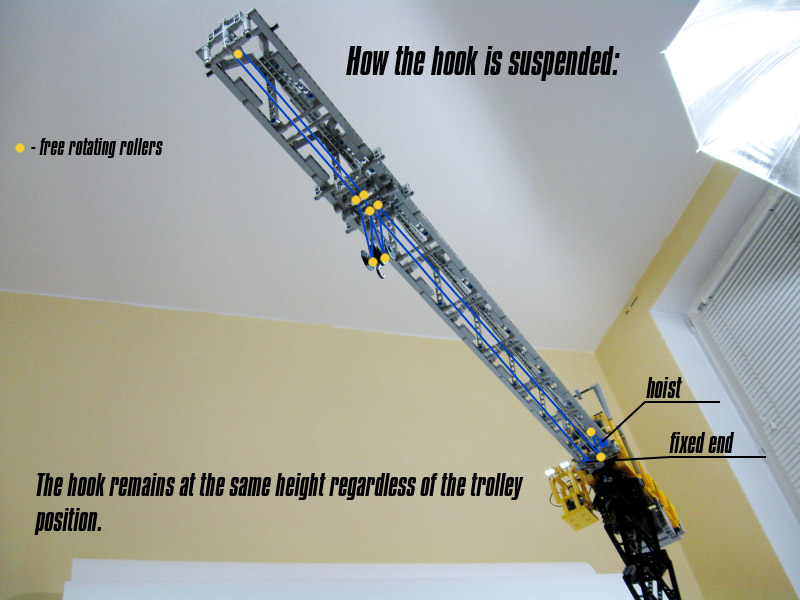
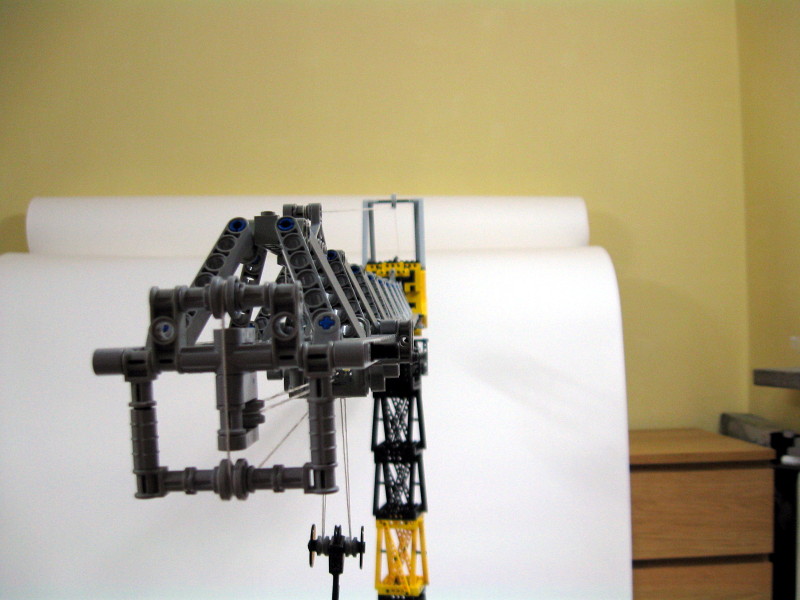
Ostatnia kwestia to konstrukcja przedniego wysięgnika - znajdują się w nim dwa zespoły linek, oba podłączone do wyciągarek w górnej części środka dźwigu. Jeden zespół opuszcza/podnosi hak, drugi porusza wózkiem z hakiem wzdłuż wysięgnika. Pierwszy zespół składa się z jednego odcinka linki, przywiązanego za jeden koniec do nasady dźwigu i poprowadzonego tak, żeby hak utrzymywał swoją wysokość kiedy wózek się przemieszcza (można też oczywiście operować hakiem i wózkiem jednocześnie). Wymagało to lekkiego kombinowania, ale było lepsze niż wsadzenie wyciągarki haka po prostu do wózka, które wymagałoby więcej miejsca i niepotrzebnie obciążało dźwig.
Drugi zespół linek jest bardziej problematyczny. Próbowałem rozwiązania z żurawia Philo, gdzie jeden zamknięty odcinek linki przechodzi przez jeden bębęn wyciągarki, ale u mnie linka ślizgała się na bębnie i nie było mowy o przemieszczaniu cięższych ładunków. Użyłem więc dwóch odcinków linki na dwóch osobnych bębnach, co jest rozwiązaniem prostszym i dużo gorszym - oba bębny pracują nierówno i między dwoma odcinkami powstają luzy lub napięcia, zależnie od pozycji wózka. W rozwiązaniu Philo dało się wybierać luzy amortyzatorem, w przypadku dwóch osobnych bębnów są one niestety zbyt duże. Trochę je ogranicza rozbudowany system bloczków u nasady dźwigu, ale generalnie działa to gorzej niż u Philo i wymaga ręcznych poprawek co jakiś czas.
I to chyba tyle. Maksymalny udźwih żurawia nie został tak do końca przetestowany - w trakcie budowy bez problemu podnosił ładunki ok. 200g i 400g. Potem robiąc film zacząłem podnosić niecałe 500g, i kiedy już prawie się to udało, puściła linka łącząca ładunek z hakiem, ładunek się odpiął, a dźwig stracił równowagę i zawalił się do tyłu. Obyło się bez poważnych uszkodzeń, ale przedni wysięgnik rozsypał się prawie w drobny mak, więc zrezygnowałem z odbudowy.
Gdyby ktoś potrzebował, to kombinując z kratownicami doszedłem do zbudowania modułu, nazwijmy to, idealnego, tzn. zbudowanego z równych odcinków liftarmów, mającego i krawędzie pionowe, i wzmocnienia ukośne. Taki moduł da się zbudować łącząc pionowe liftarmy 9-studowe z poziomymi belkami 10-studowymi na planie kwadratu, u dodając wzmocnienia ukośne z liftarmów 13-studowych. Pasuje to idealnie, daje się łatwo ułożyć jeden moduł na drugim, i jest z pewnością sztywniejsze niż główny maszt mojego dźwigu - ale nie miałem tylu części żeby zbudować tak wysoki maszt z takich modułów.
GALERIA
Przykładowe zdjęcia:









I film (uwaga, drastyczna końcówka):
[youtube]http://www.youtube.com/watch?v=1itRMNro5a8[/youtube]
PS. Chciałbym podziękować szarikowi za bardzo przydatne i fachowe uwagi na temat kratownic, oraz szww za piękne fotki żurawia.
Dane techniczne:
Waga: 2.98 kg
Wymiary: dł. 184s (147 cm) / szer. 19s (plus podstawa) / wys. 159s (127 cm)
Napęd: 1 x PF XL, 1 x PF Medium, 2 x 71427
Co to dużo mówić, klasyczny żuraw budowlany. W zamierzeniu miał być dość duży żeby przenosić ładunki z podłogi na biurko - i jest. Wygląda jak widać, opiszę w skrócie jego konstrukcję. Generalnie dopóki nie zacząłem budować, żuraw wydawał mi się raczej prostą konstrukcją. Teraz już tak nie uważam, a schemat typowego żurawia poniżej:
Jest to oczywiście dźwig kratownicowy, zbudowany z kratownic trzech różnych typów. Jestem raczej laikiem w kwestii kratownic, ale według mojego rozeznania każda kratownica może mieć do czynienia z czterema czynnikami: zginaniem, skręcaniem, ściskaniem i rozciąganiem. Ideałem byłoby używanie wyłącznie kratownic które są odporne na wszystkie cztery, ale takie kratownice są z zasady najcięższe i niekoniecznie spełniałyby dobrze swoją rolę. Żaden z użytych tutaj trzech typów nie jest odporny na wszystkie te czynniki. Po kolei:
- maszt główny to typowa kratownica prostokątna. W dolnej części otoczona zastrzałami i wzmocniona pionowymi liftarmami. Wyżej zabrakło mi liftarmów w tym kolorze odpowiedniej długości, a ponieważ maszt znosił bez nich takie obciążenie jakie chciałem, poprzestałem na tym. Esteci i tak będą narzekać, ale przynajmniej dźwig nie jest kolorystycznie zbyt łaciaty. Kratownica jest odporna na ściskanie, skręcanie i zginanie, ale nie na rozciąganie ponieważ składa się z modułów.
- tylny wysięgnik miał mieć puste miejsce w środku, więc powstał z niepełnej kratownicy prostokątnej, tzn. takiej która ma wzmocnione tylko dwa boki zamiast czterech. Jest odporna na wszystko oprócz skręcania.
- przedni wysięgnik zbudowany jest z kratownicy trójkątnej. Jest ona sporo lżejsza od prostokątnej i łatwo dostosować ją do poruszającego się wózka z hakiem, a oferuje odporność na zginanie i ściskanie. Jest bardzo wrażliwa na skręcanie, ale nie ma z nim do czynienia, a przed rozciąganiem chroni ją odciąg dociskający ją do reszty konstrukcji.
Cały dźwig daje się łatwo rozłożyć na trzy części: górne ramię wraz z obrotnicą, koronę obrotnicy, i maszt główny. Obrotnica ma dość nietypową konstrukcję: bazuje na standardowej obrotnicy Lego ze wzmocnieniem w postaci sześciu wałków w dwóch zespołach po trzy z przodu i z tyłu ramienia. Wałki są umieszczone kilka studów powyżej obrotnicy, i opierają się na koronie przez którą ona przechodzi, i z którą jest połączona. Jest to mój pierwszy poważny układ wzmocnienia obrotnicy i muszę powiedzieć że działa idealnie - zapewne głównie dzięki umieszczeniu wzmocnienia sporo powyżej obrotnicy.
Obrotnica Lego widoczna wewnątrz korony, nad koroną przednie 3 wałki. Uśmiech na twarzy pana Zdzisława podkreśla jak przyjemna jest praca na dźwigu
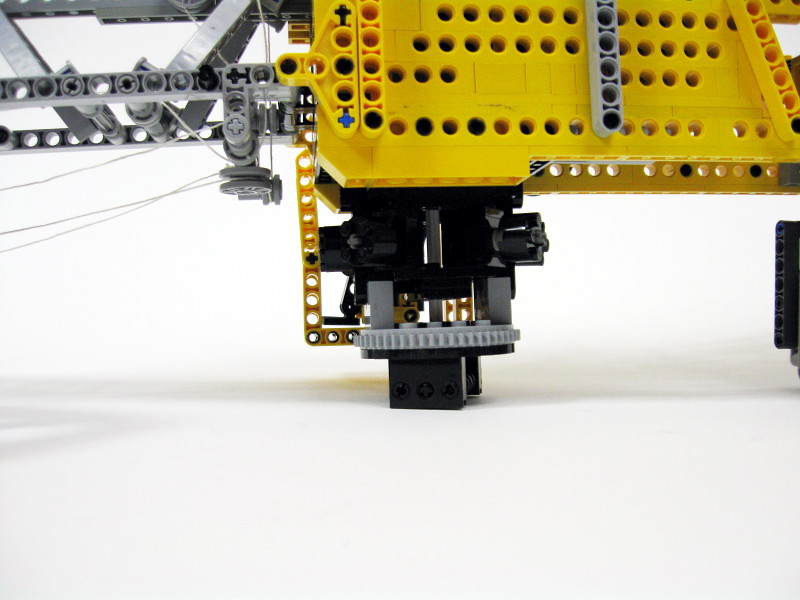
Sam dźwig nie obraca się jednak odpychając od obrotnicy. Po obejrzeniu dokładnie pięknego żurawia Thomasa Avery'ego wiedziałem że masa ramienia będzie miała tendencję do skręcania osi przenoszących obrót. Jednocześnie martwiło mnie, że długim wysięgnikiem dźwigu będzie szarpało przy włączaniu i wyłączaniu silnika obrotowego. Wtedy przypomniałem sobie o osiach 'szestkastkach' z Jumping Gianta, wykonanych z twardego ale elastycznego tworzywa. Dźwig obraca się odpychając się od takiej właśnie osi, zamocowanej na sztywno do spodu obrotnicy, a obrotowo do góry dźwigu. Dzięki elastyczności osi wysięgnik nie szarpie, ale obraca się z dużą bezwładnością - trochę komplikuje to sterowanie, ale jest do opanowania.
Z pozostałych rzeczy - na tylnym wysięgniku znajdują się dwie przeciwwagi, jedna stała na jego końcu, a druga ruchoma w jego wnętrzu. Ruchoma przeciwwaga jest moim prywatnym pomysłem, nie stosowanym o ile wiem w rzeczywistości, i liczyłem że zwiększy nośność dźwigu. Można nią poruszać zdalnie, jeździ na prostym wózeczku wewnątrz tylnego wysięgnika, z dwoma battery boxami podwieszonymi pod spodem. Początkowo miałem nawet pomysł żeby poruszać nią automatycznie przy użyciu odciągów: tzn. zamiast jednego odciągu łączącego przedni wysięgnik ze środkiem dźwigu i drugiego łączącego tylny, chciałem użyć jednego odciągu łączącego przód i tył, a tylko luźno przechodzącego przez środek. Liczyłem, że jeśli na środku podłączę pod odciąg oś i włożę ją do switcha, uda się doprowadzić do sytuacji kiedy przedni wysięgnik opadając pod obciążeniem będzie włączał przełącznik tak żeby przeciwwaga się cofnęła - i vice versa. W praktyce okazało się że przełącznik jest mało precyzyjny, a przemieszczenie przedniego wysięgnika względem środka dźwigu jest zbyt nieznaczne.
Ostatnia kwestia to konstrukcja przedniego wysięgnika - znajdują się w nim dwa zespoły linek, oba podłączone do wyciągarek w górnej części środka dźwigu. Jeden zespół opuszcza/podnosi hak, drugi porusza wózkiem z hakiem wzdłuż wysięgnika. Pierwszy zespół składa się z jednego odcinka linki, przywiązanego za jeden koniec do nasady dźwigu i poprowadzonego tak, żeby hak utrzymywał swoją wysokość kiedy wózek się przemieszcza (można też oczywiście operować hakiem i wózkiem jednocześnie). Wymagało to lekkiego kombinowania, ale było lepsze niż wsadzenie wyciągarki haka po prostu do wózka, które wymagałoby więcej miejsca i niepotrzebnie obciążało dźwig.
Drugi zespół linek jest bardziej problematyczny. Próbowałem rozwiązania z żurawia Philo, gdzie jeden zamknięty odcinek linki przechodzi przez jeden bębęn wyciągarki, ale u mnie linka ślizgała się na bębnie i nie było mowy o przemieszczaniu cięższych ładunków. Użyłem więc dwóch odcinków linki na dwóch osobnych bębnach, co jest rozwiązaniem prostszym i dużo gorszym - oba bębny pracują nierówno i między dwoma odcinkami powstają luzy lub napięcia, zależnie od pozycji wózka. W rozwiązaniu Philo dało się wybierać luzy amortyzatorem, w przypadku dwóch osobnych bębnów są one niestety zbyt duże. Trochę je ogranicza rozbudowany system bloczków u nasady dźwigu, ale generalnie działa to gorzej niż u Philo i wymaga ręcznych poprawek co jakiś czas.
I to chyba tyle. Maksymalny udźwih żurawia nie został tak do końca przetestowany - w trakcie budowy bez problemu podnosił ładunki ok. 200g i 400g. Potem robiąc film zacząłem podnosić niecałe 500g, i kiedy już prawie się to udało, puściła linka łącząca ładunek z hakiem, ładunek się odpiął, a dźwig stracił równowagę i zawalił się do tyłu. Obyło się bez poważnych uszkodzeń, ale przedni wysięgnik rozsypał się prawie w drobny mak, więc zrezygnowałem z odbudowy.
Gdyby ktoś potrzebował, to kombinując z kratownicami doszedłem do zbudowania modułu, nazwijmy to, idealnego, tzn. zbudowanego z równych odcinków liftarmów, mającego i krawędzie pionowe, i wzmocnienia ukośne. Taki moduł da się zbudować łącząc pionowe liftarmy 9-studowe z poziomymi belkami 10-studowymi na planie kwadratu, u dodając wzmocnienia ukośne z liftarmów 13-studowych. Pasuje to idealnie, daje się łatwo ułożyć jeden moduł na drugim, i jest z pewnością sztywniejsze niż główny maszt mojego dźwigu - ale nie miałem tylu części żeby zbudować tak wysoki maszt z takich modułów.
GALERIA
Przykładowe zdjęcia:




I film (uwaga, drastyczna końcówka):
[youtube]http://www.youtube.com/watch?v=1itRMNro5a8[/youtube]
PS. Chciałbym podziękować szarikowi za bardzo przydatne i fachowe uwagi na temat kratownic, oraz szww za piękne fotki żurawia.