Przy okazji prezentacji w grudniu 2011 mojego modelu [url=http://www.00453005_0000002.pl/forum/viewtopic.php?t=15762]Sennebogen 835R Special[/url] została mi rzucona przez kolegę Bobofrutxa rękawica:
Od tamtego czasu zmieniłem zdanie i tak oto powstał:noniusz pisze:Bobofrutx pisze: Czy można spodziewać się w twoim wykonaniu tego oto cudaka: 310 Multiloader?
Kiedyś rozważałem budowę podobnej maszyny ale z ładowarkami teleskopowymi w wersji LEGO (tj. bez pomocy hydrauliki) są zasadniczo 2 problemy:
1) w "realu" maszyny te posiadają hydrauliczną kompensację ruchu osprzętu roboczego, tzn. przy podnoszeniu ramienia teleskopowego osprzęt pozostaje np. równolegle do podłoża w trakcie całego cylku i o ile taką kompensację w łatwy sposób idzie wykonać na zwykłym ramieniu to już na teleskopowym było by ciężko...
2) ładowarki teleskopowe mają 3 tryby skrętu i przesterowanie jednego trybu w drugi mogło by być kłopotliwe
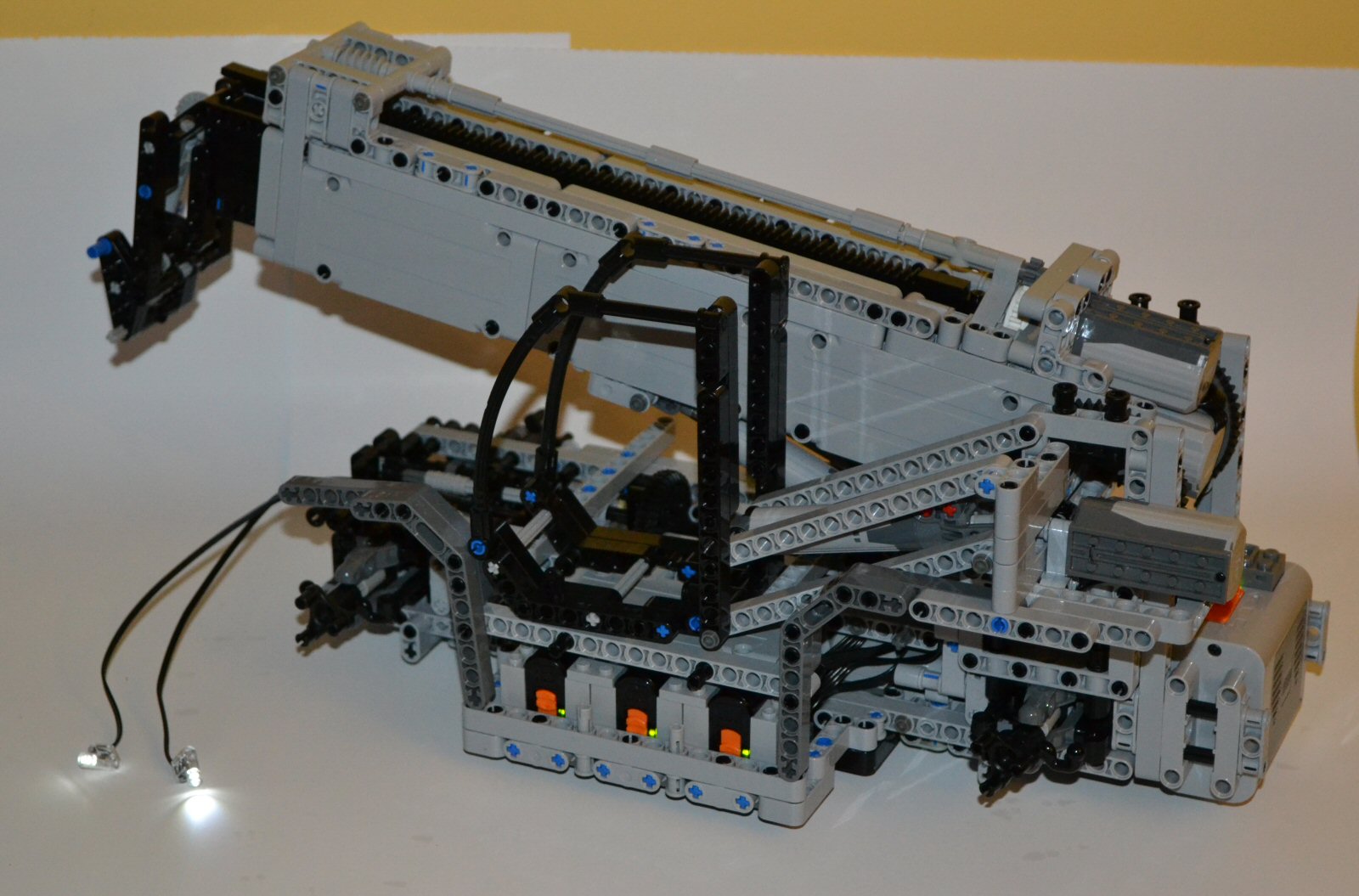
Sennebogen 310 multiloader
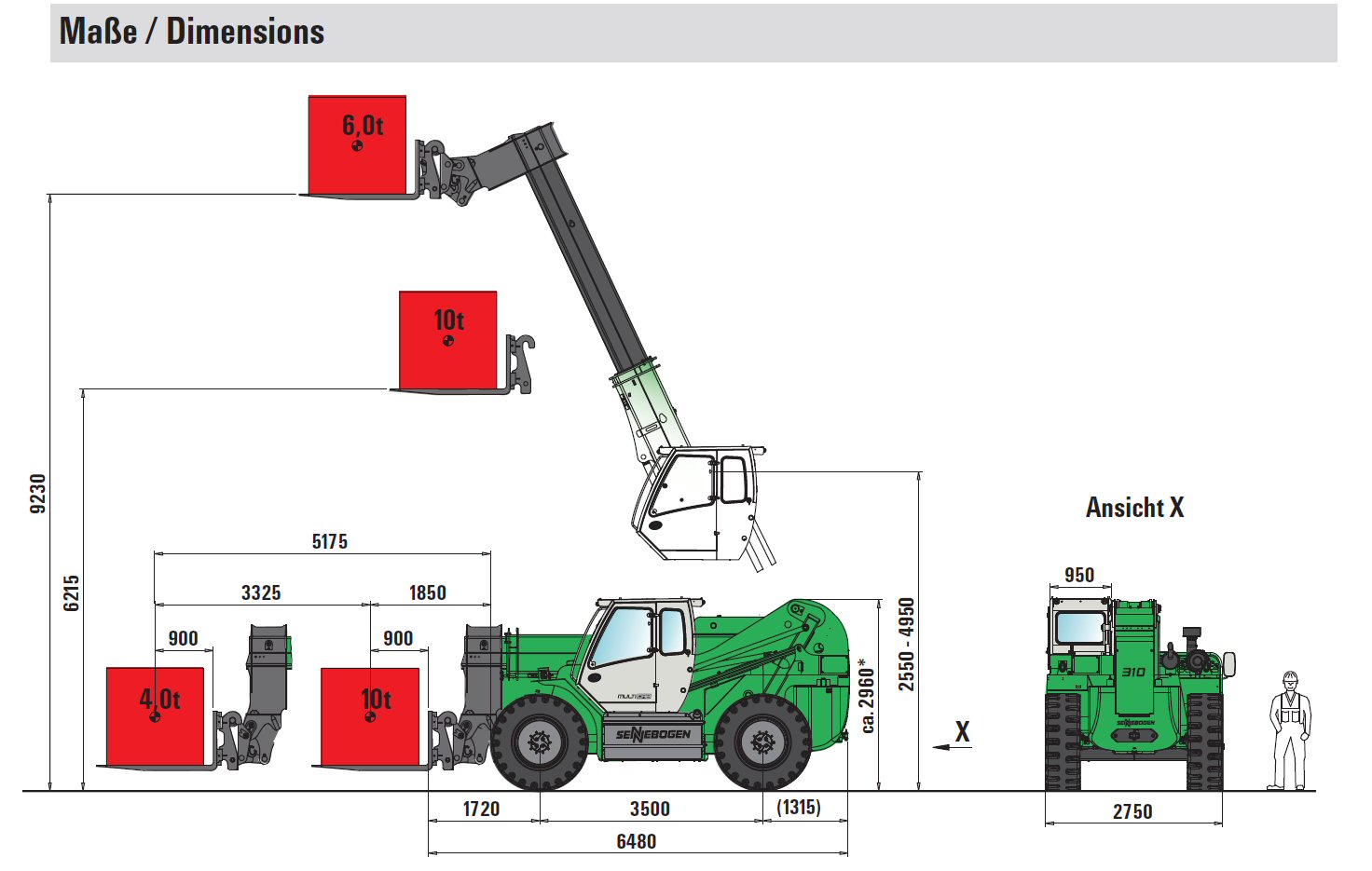
Model, na którym się wzorowałem to ładowarka teleskopowa z podnoszoną kabiną o wadze operacyjnej ok. 20 ton.


Do budowy modelu zostały użyte m.in.:
- 1 x PF XL motor
- 8 x PF M motor
- 1 x Battery box
- 4 x PF IR receiver
- 1 x PF lights
- 1 X PF switch
- 1 x PF wire extension
- 3 x linear actuator
- 1 x mini LA
OPIS FUNKCJI
Jazda
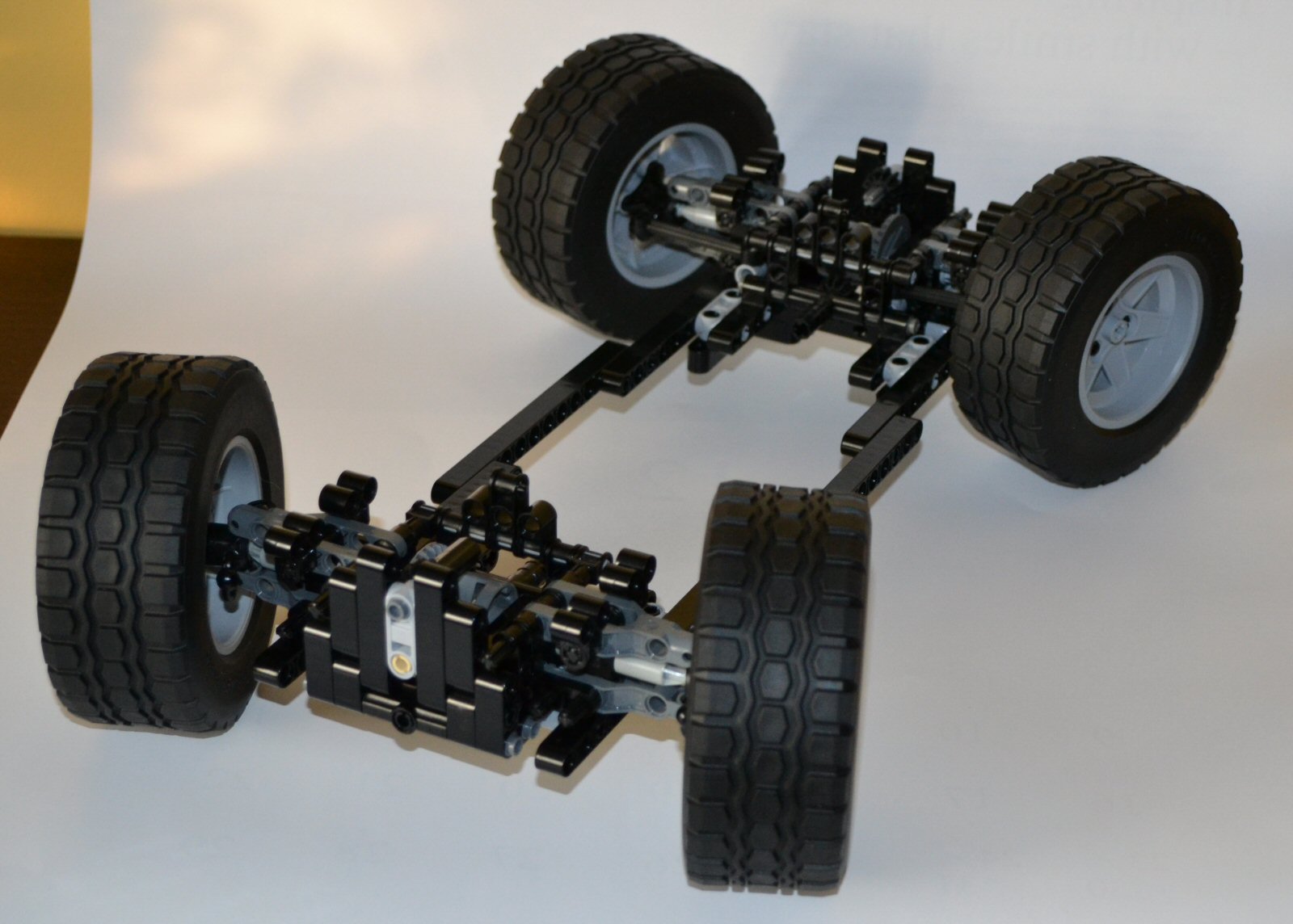
Jazda realizowana jest przez 1 silnik XL. W modelu tak jak i w prawdziwej maszynie obie osie są osiami napędowymi. Obie osie mają dyferencjał nowego typu oraz elementy zawieszenia z modelu 8070. Przełożenie z silnika na koła jest w stosunku 1:7.

Skręt
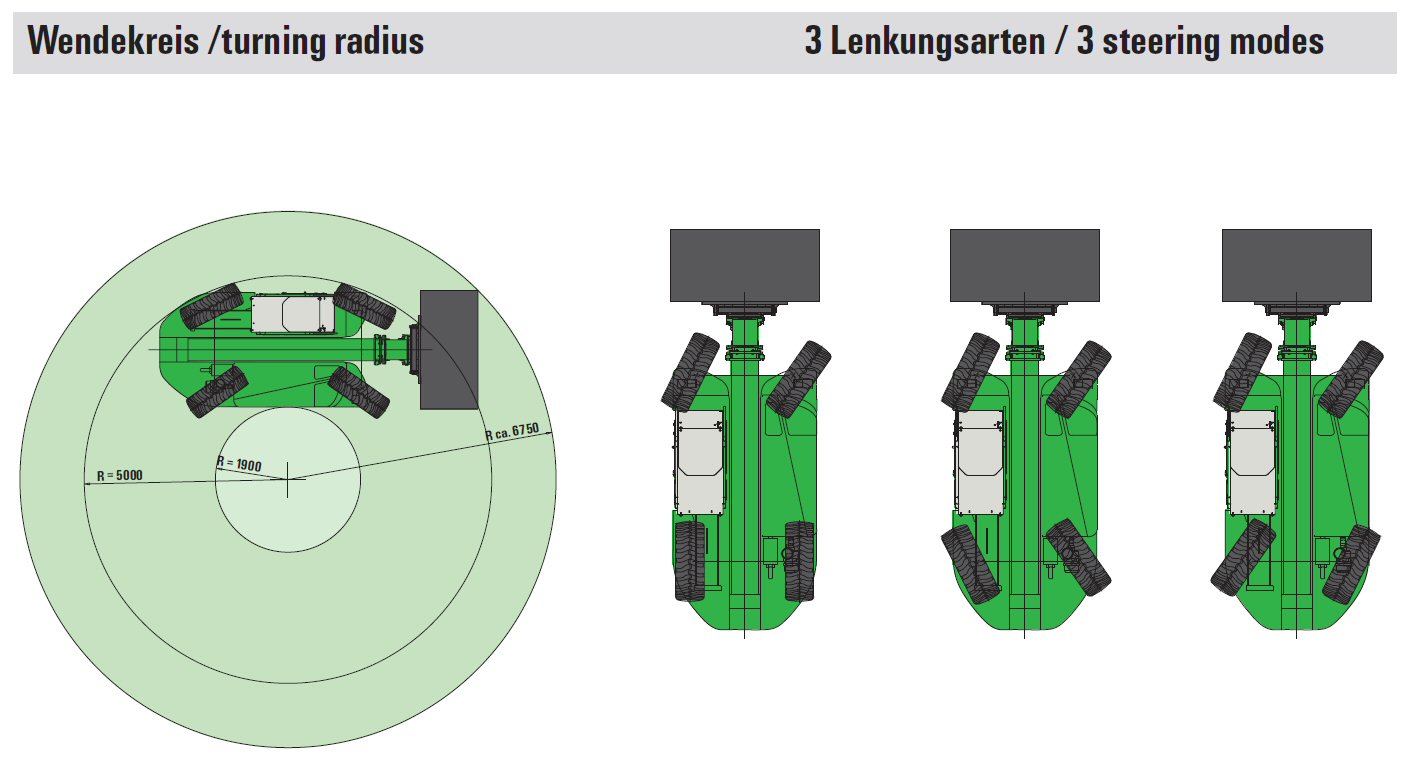
Funkcja skrętu w modelu obsługiwana jest przez 3 silniczki Medium: każda z osi ma osobny silnik, który jest odpowiedzialny za skręt jej kół, kolejny silniczek odpowiedzialny jest za przełączanie trybu skrętu. Model tak jak prawdziwa maszyna może skręcać w 3 trybach:
- skręt tylko jednej, przedniej osi
- skręt obu osi w przeciwnych kierunkach
- skręt obu osi w tym samym kierunku, tzw. krab
Przełączanie trybów skrętu możliwe jest dzięki podłączeniu silniczka tylnej osi do przełącznika PF, dzięki któremu możemy wyłączyć silnik lub ustawić obroty silniczka na lewe lub prawe.


Przełączanie trybów skrętu mozna było również zrealizować przełącznikiem "mechanicznym", np. tak jak poniżej (szare zębatki z12 odpowiedzialne były by za skręt)
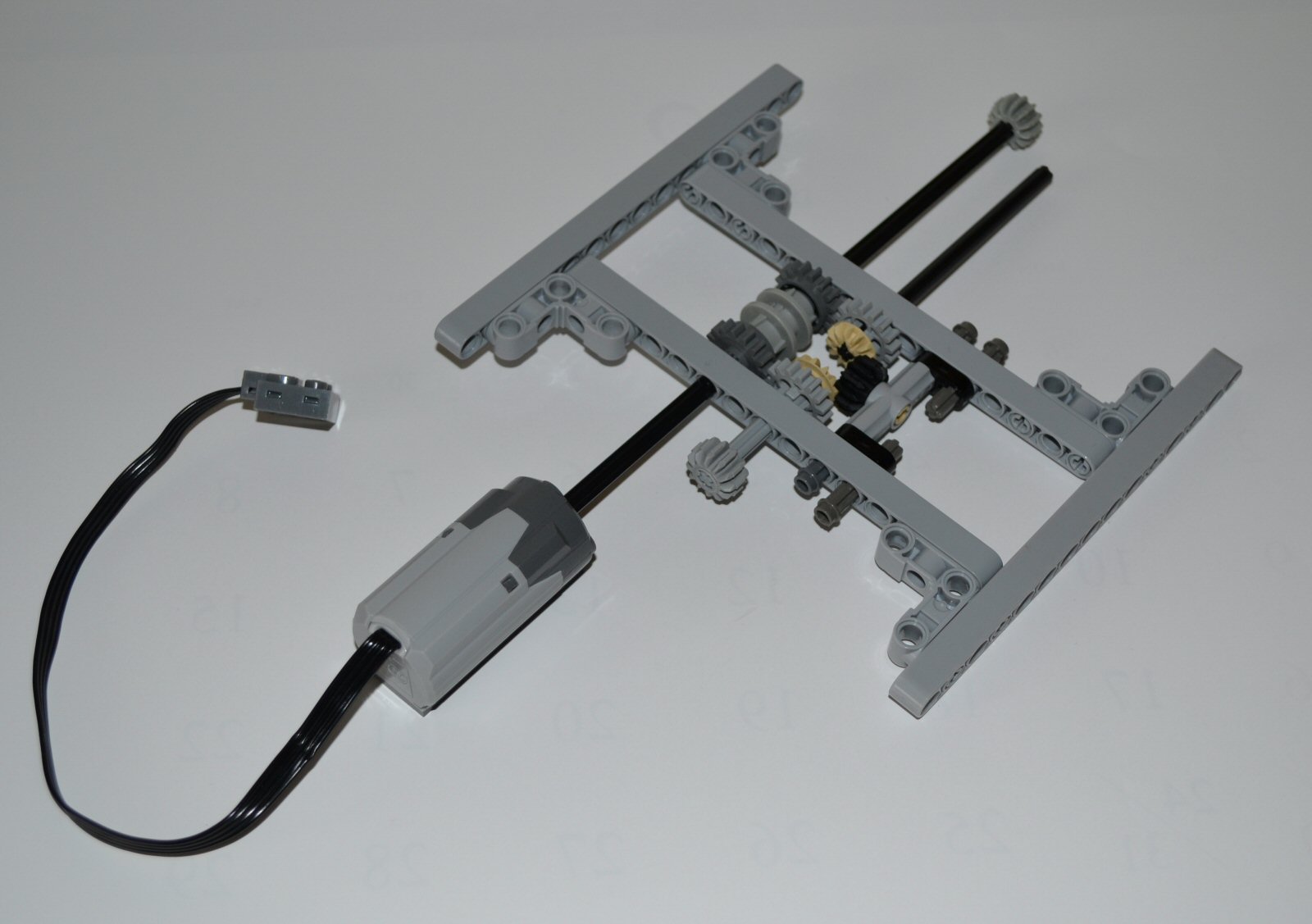
ale było by to prawdopodobnie wysoce nieprecyzyjne, pozostałem więc przy rozwiązaniu "elektrycznym"
Funkcje wysięgnika
Tu zaczęły się prawdziwe schody...
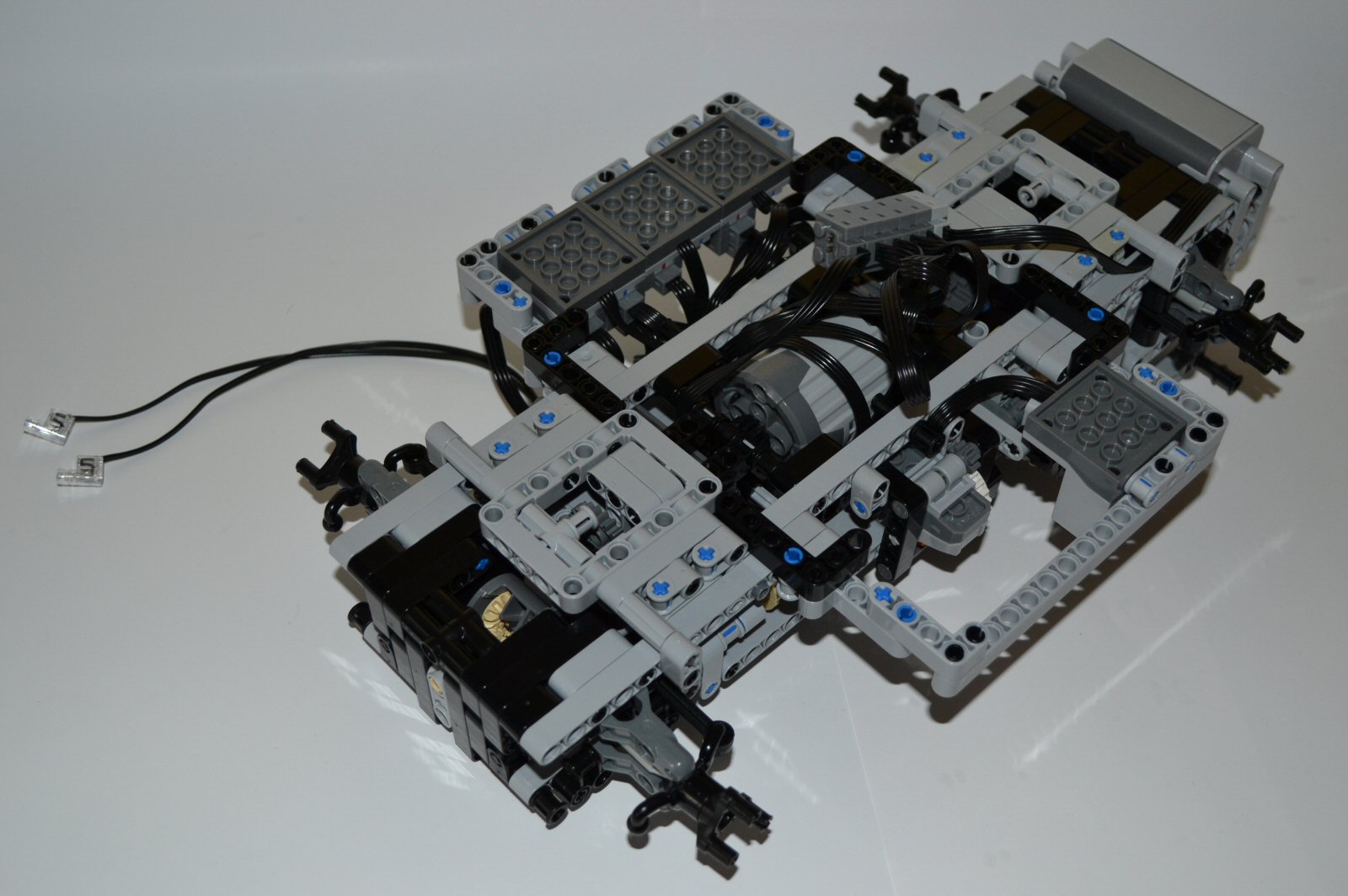
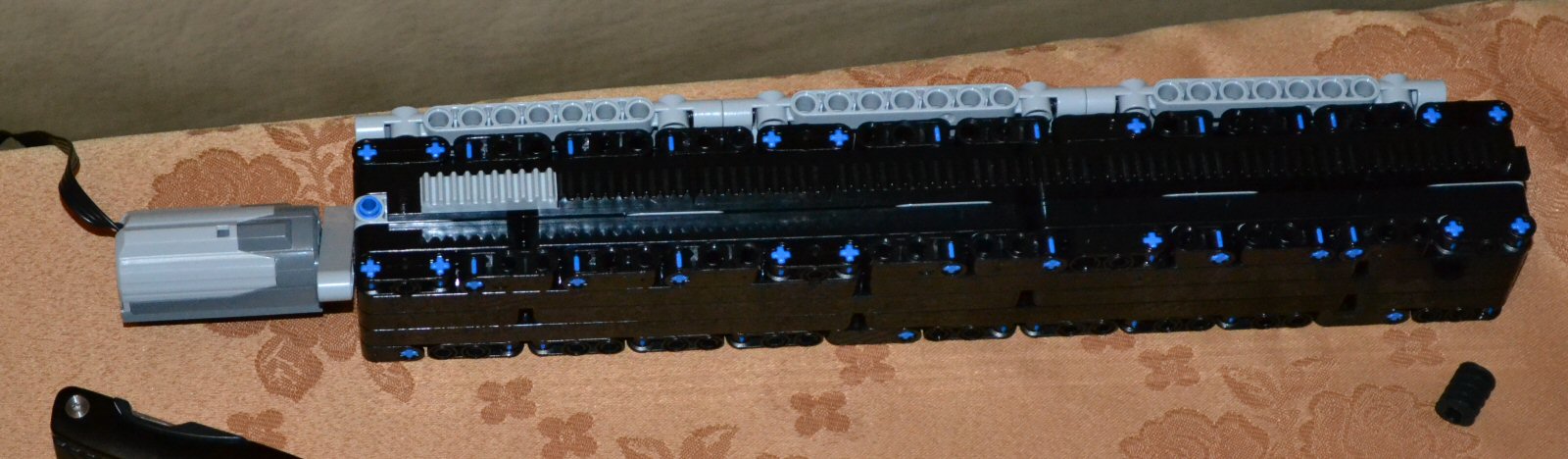
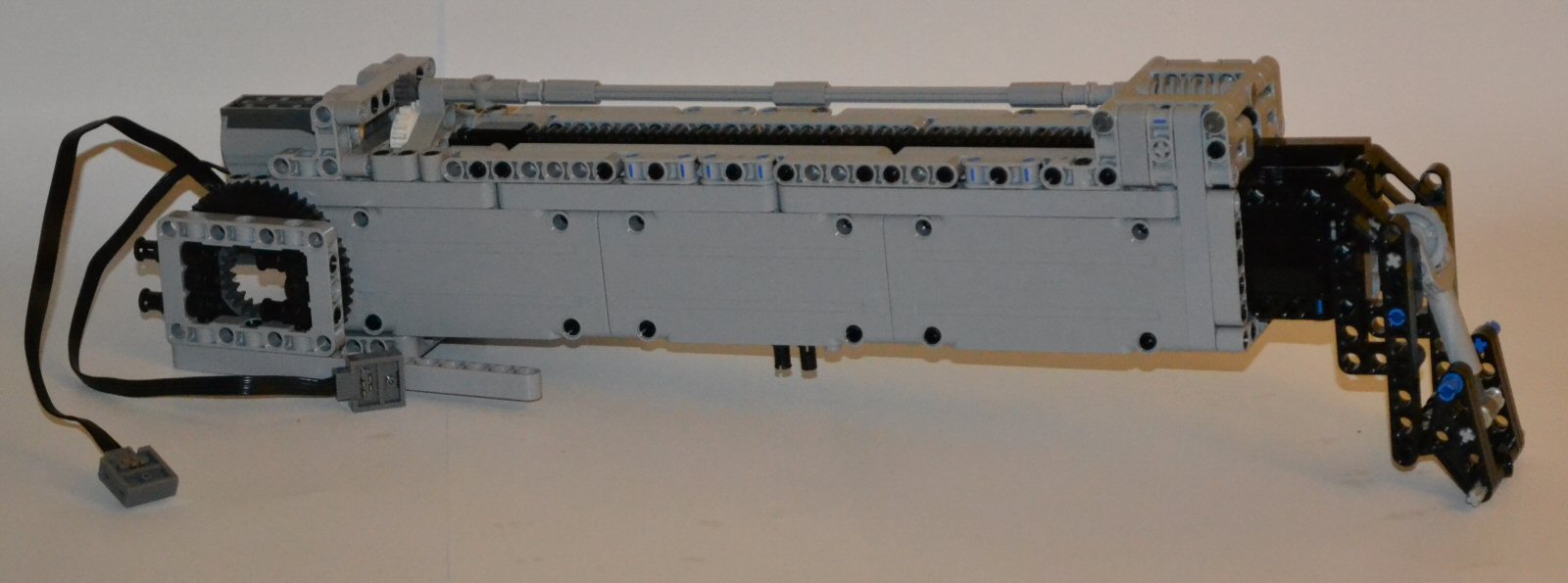
O ile zbudowanie osobno ramienia teleskopowego, lub zwykłego wysięgnika ze sterowanym osprzętem nie stanowi problemu o tyle połączenie ramienia teleskopowego z ruchomym osprzętem na końcu stanowiło nie lada wyzwanie. Problem polegał na tym, żeby wewnątrz ramienia teleskopowego umieścić teleskopowy wał napędowy do obsługi ruchów osprzetu. Po dłuższych przemyśleniach rozwiązanie okazało się niezwykle proste, a mianowicie wystarczyło w odpowiedni sposób połączyć 3 axle L32 i kilka kół pasowych:

Dzięki temu wraz z wysuwem ramienia wysuwa się również wał napędowy małego siłowniczka odpowiedzialnego za wychył osprzętu.
Jedyna niedogodność to to, że teleskopowy wał ma średnicę 3 studów, tak więc ramię wysuwane ma przekrój 5 x 5 studów a cały wysięgnik ma przekrój 7 x 7 studów.
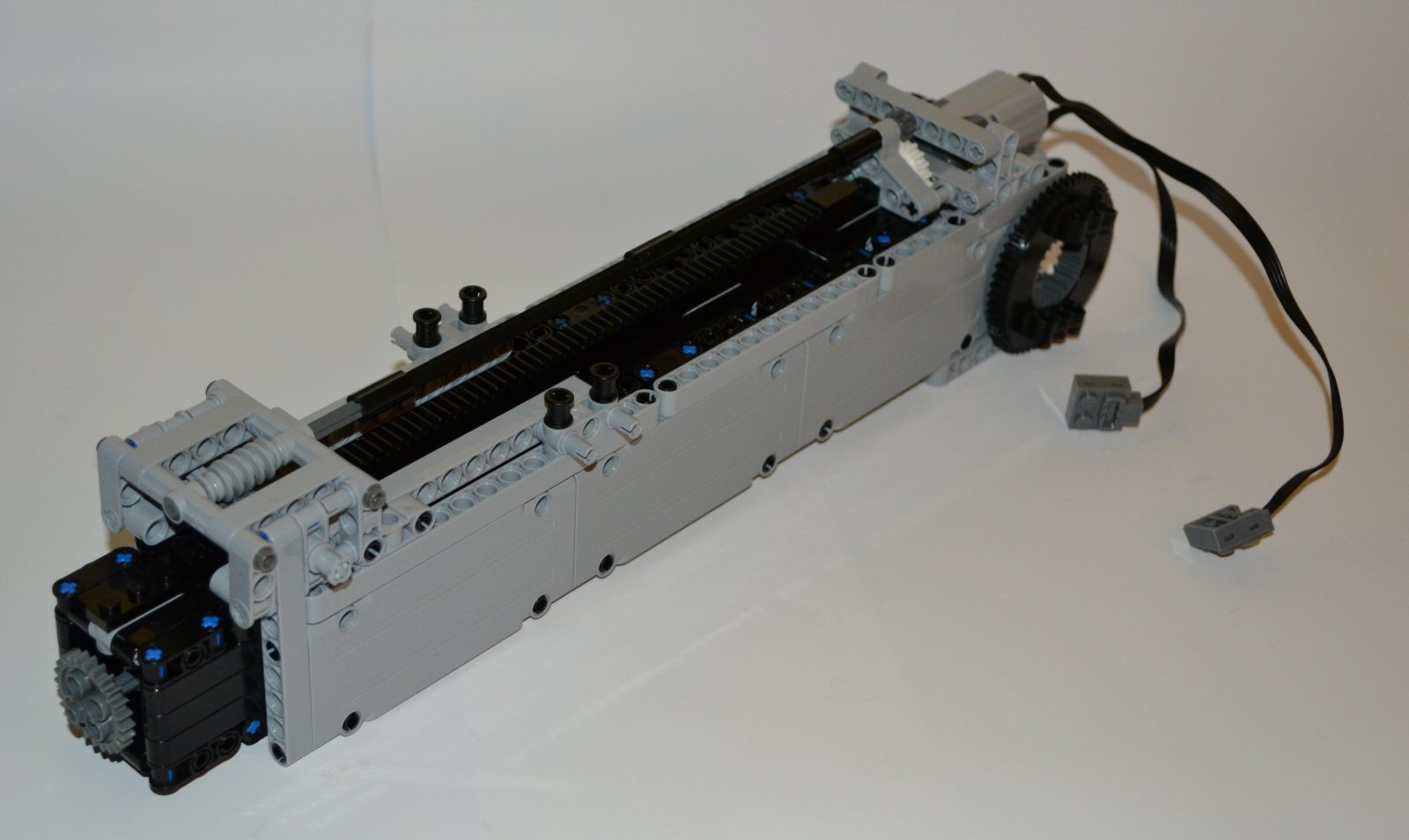
Przy takim przekroju ramię stało się dość masywne, ale 2 siłowniki śrubowe napędzane 2 silnikami medium bez problemu dawały sobie radę z podnoszeniem ramienia, nawet przy pełnym wysuwie.
Wysuw ramienia realizowany jest przez kolejny medium, tak samo jak i operowanie małym siłowniczkiem śrubowym na końcu ramienia (siłownik odpowiedzialny za wychył osprzętu)
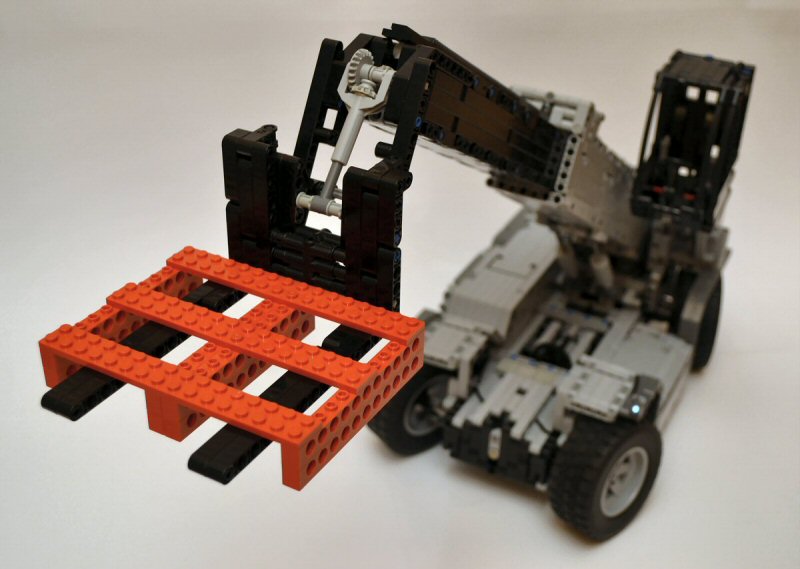
Jako osprzęt zbudowałem łyżkę ładowarkową oraz widły paletowe
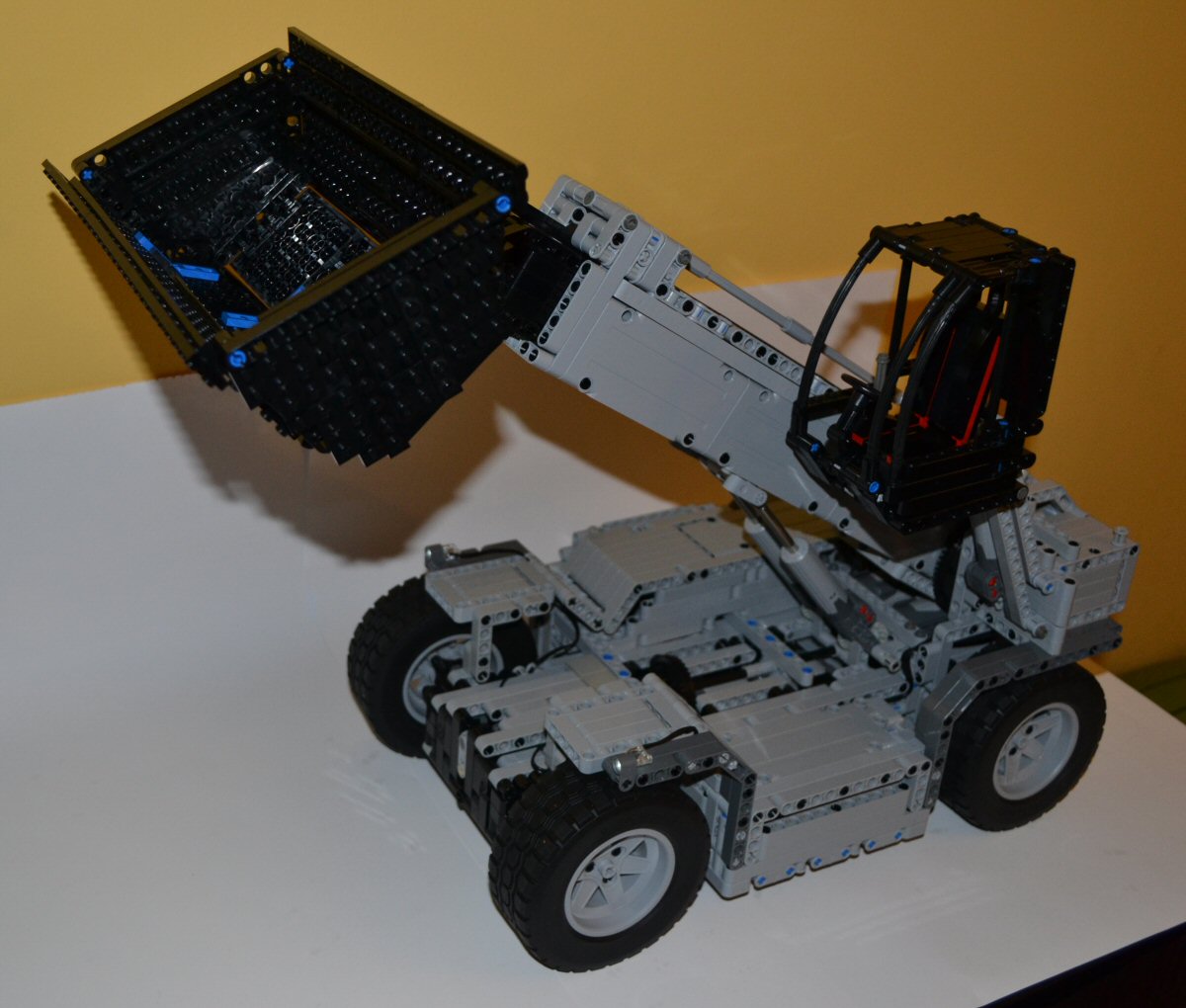
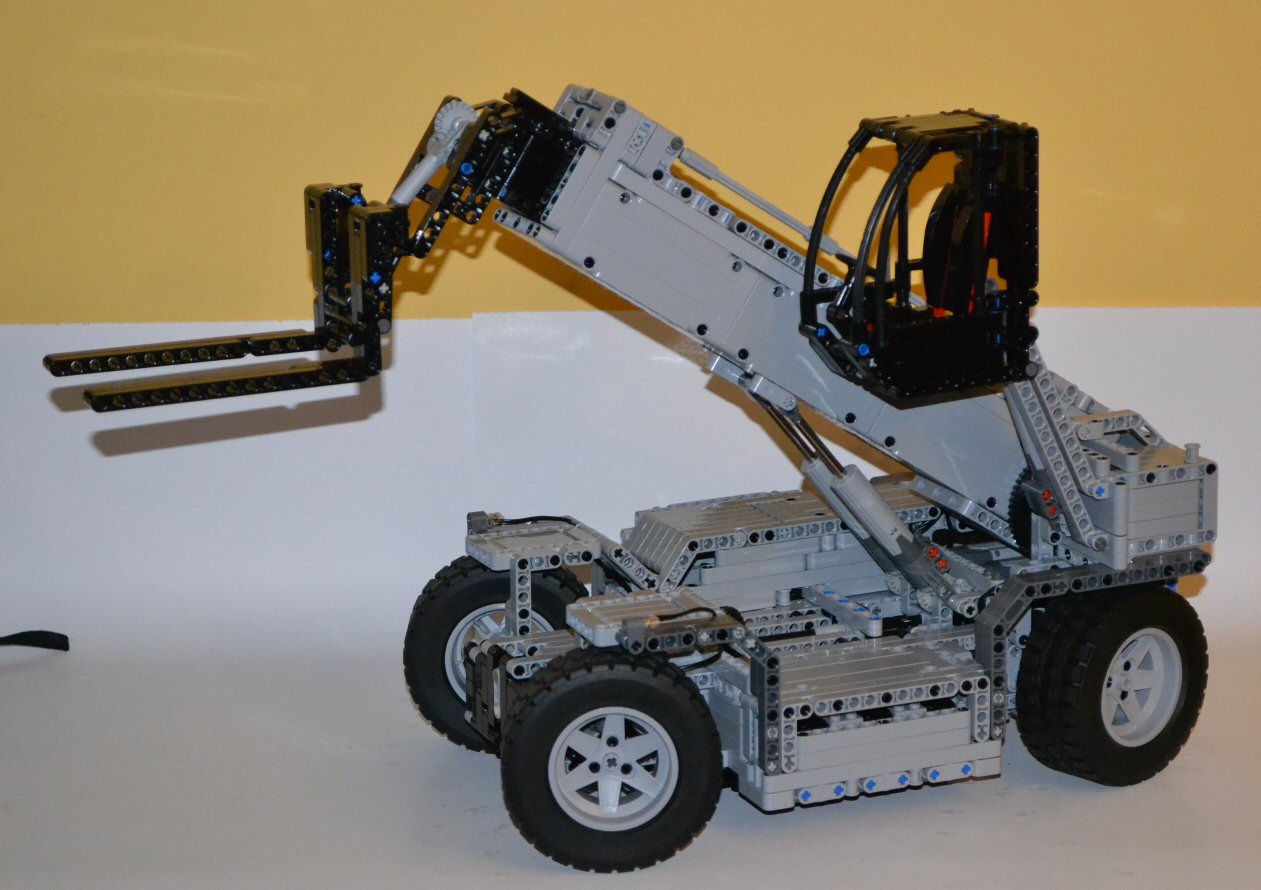
Zmiana osprzętu odbywa się szybko i sprawnie (film 4:32 -> 5:22)
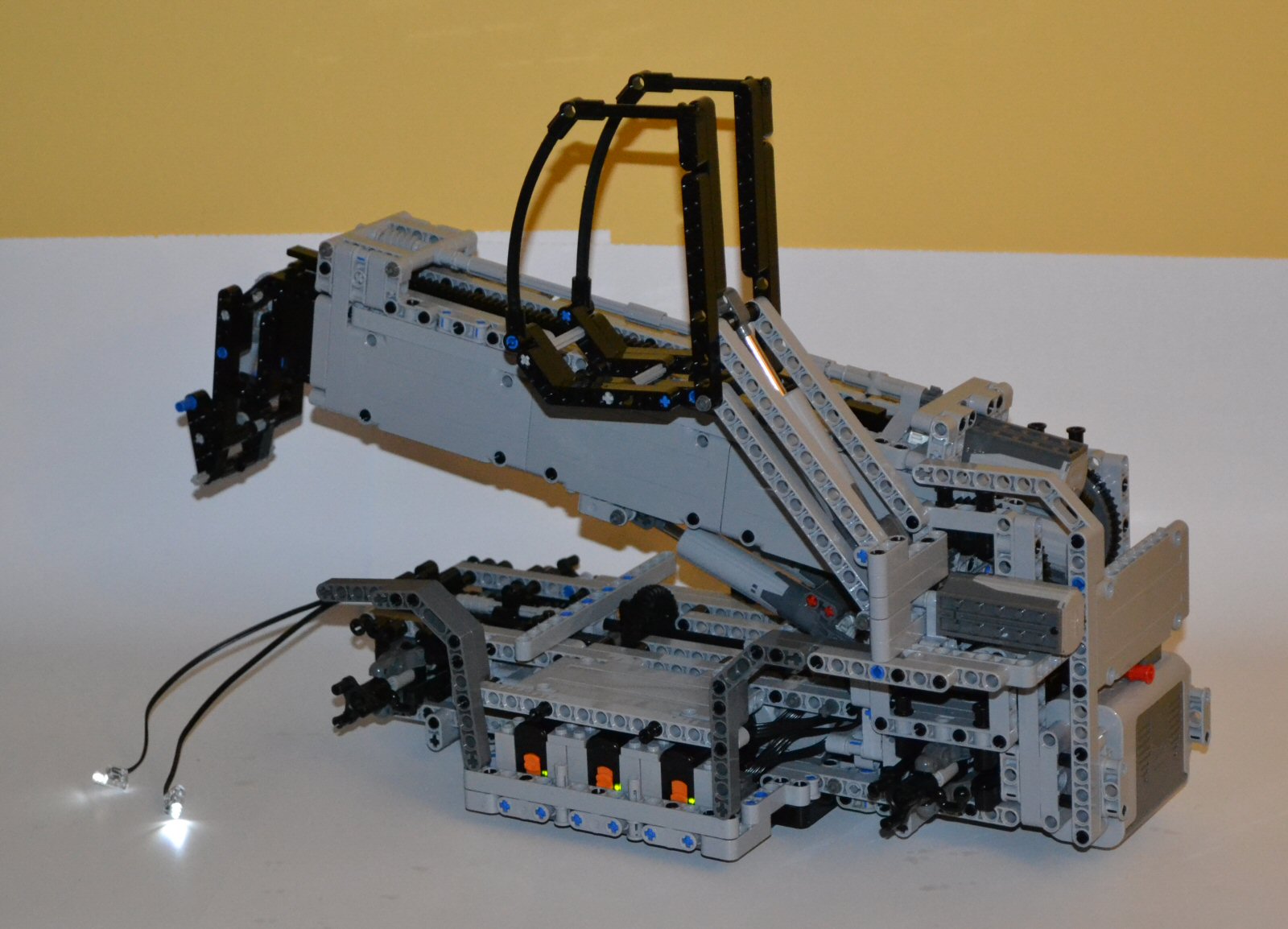
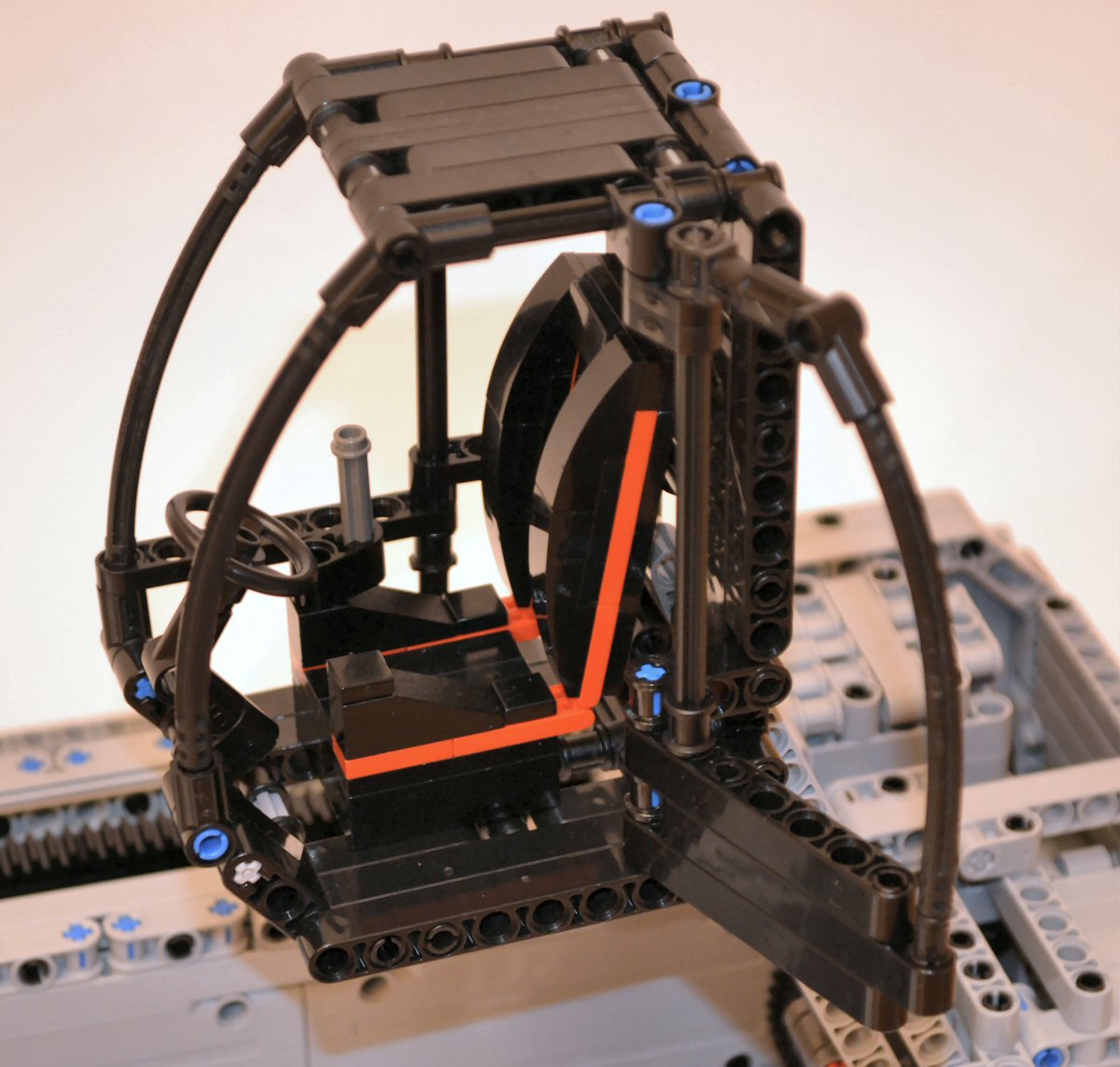
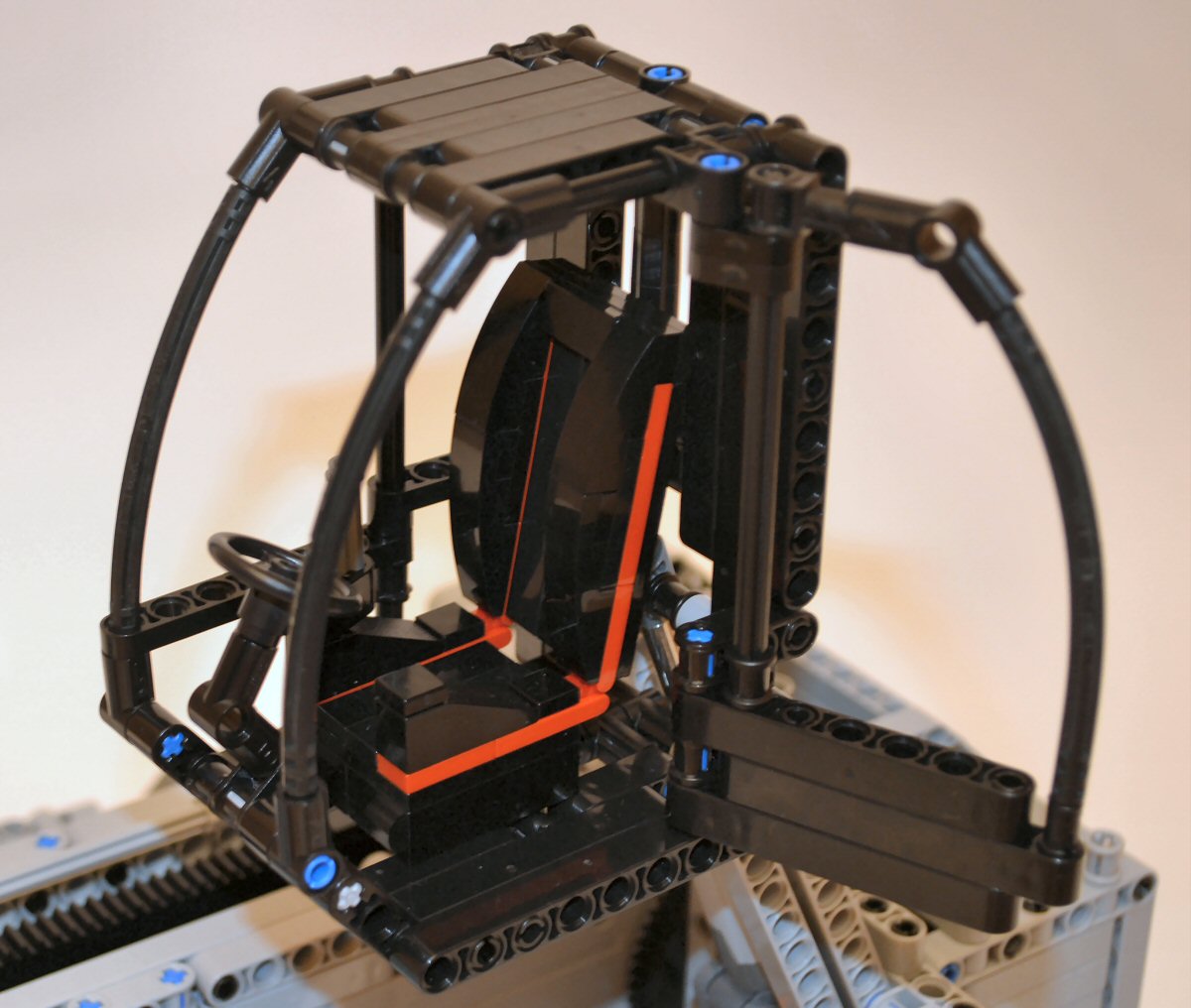
Podnoszenie kabiny
Kabina podnoszona jest przez siłownik śrubowy napedzany silnikiem medium
"Dopieszczając" wygląd kabiny wykonałem mały ukłon w stronę MT, a mianowicie fotel operatora wyjątkowo nie został wykonany z liftarmów:
Światła robocze
Światła podłączone są bezpośrednio pod battery box i włączają się razem z nim
PODSUMOWANIE
Budowa modelu zajeła dużo czasu... Najtrudniejszymi etapami było skonstruowanie wysięgnika oraz układu skrętu. Model właściwie oddaje w pełni oryginał, główne 3 różnice to:
- brak wahliwej osi
- użycie 2 siłowników do podnoszenia ramienia zamiast 1
- brak kompensacji wychyłu osprzętu, jest za to teleskopowy naped do regulacji wychyłu
Na końcu budowy byłem mile zaskoczony tym, że udało się w niewielkiej i zdalnie działającej konstrukcji zmieścić 9 silniczków, 4 odbiorniki podczerwieni i wiele innych komponentów. Model został zabudowany i nie ma niepotrzebnych prześwitów.




Galeria na Brickshelf'ie
FILM
I jak już wcześniej napisałem
noniusz pisze:PS: nie jest to moje ostatnie słowo w temacie maszyn przeładunkowych Sennebogen :)