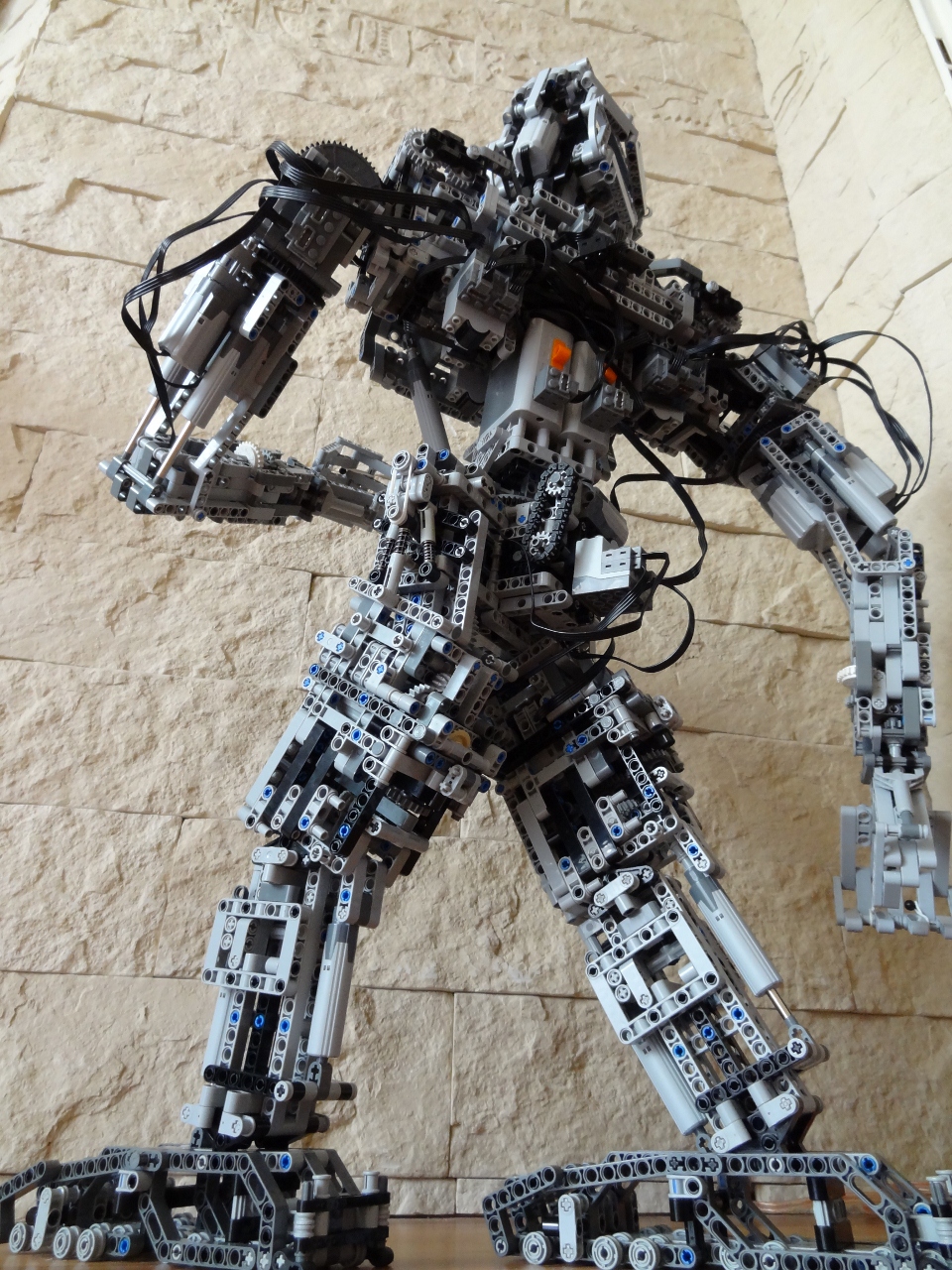
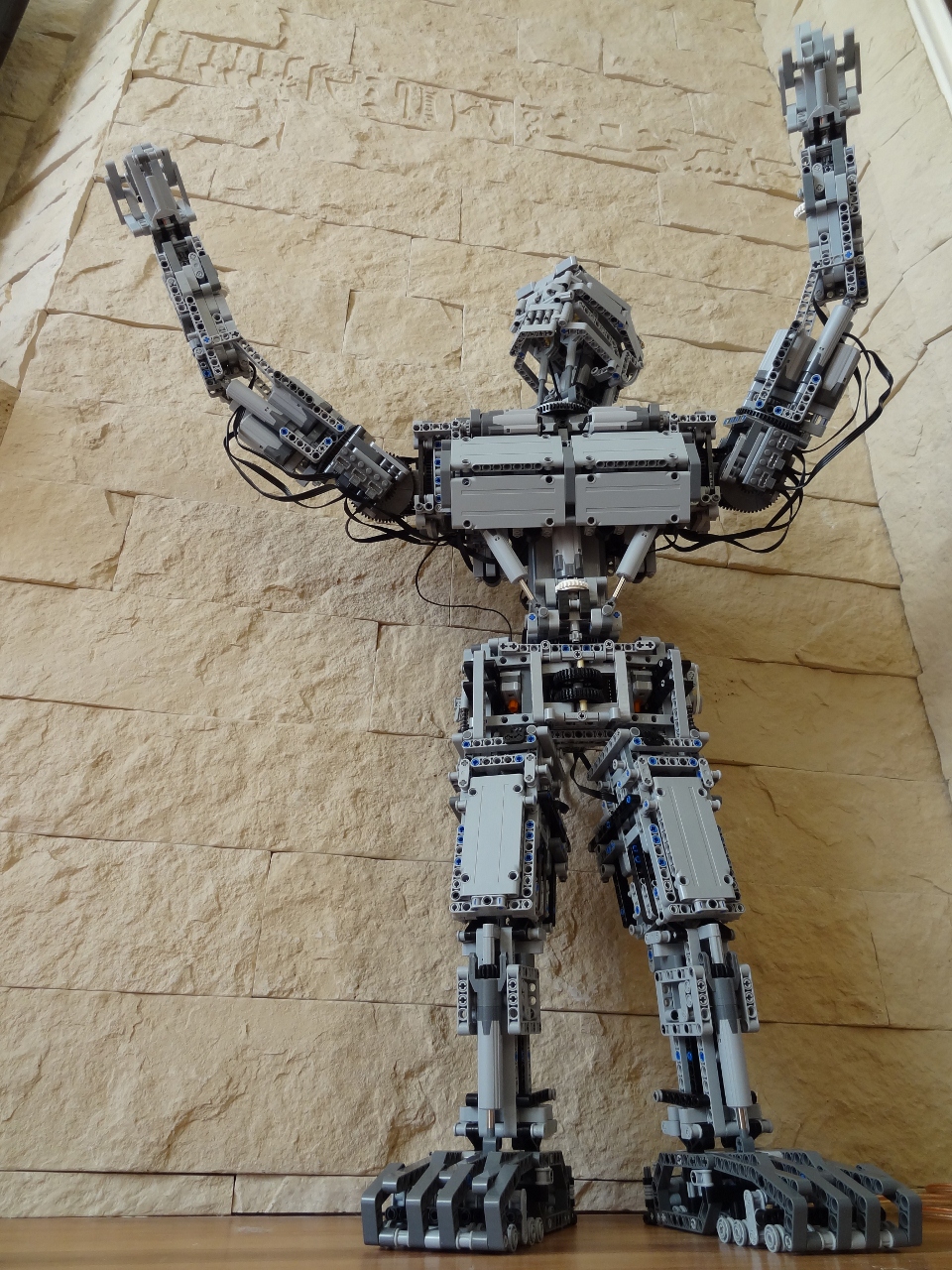
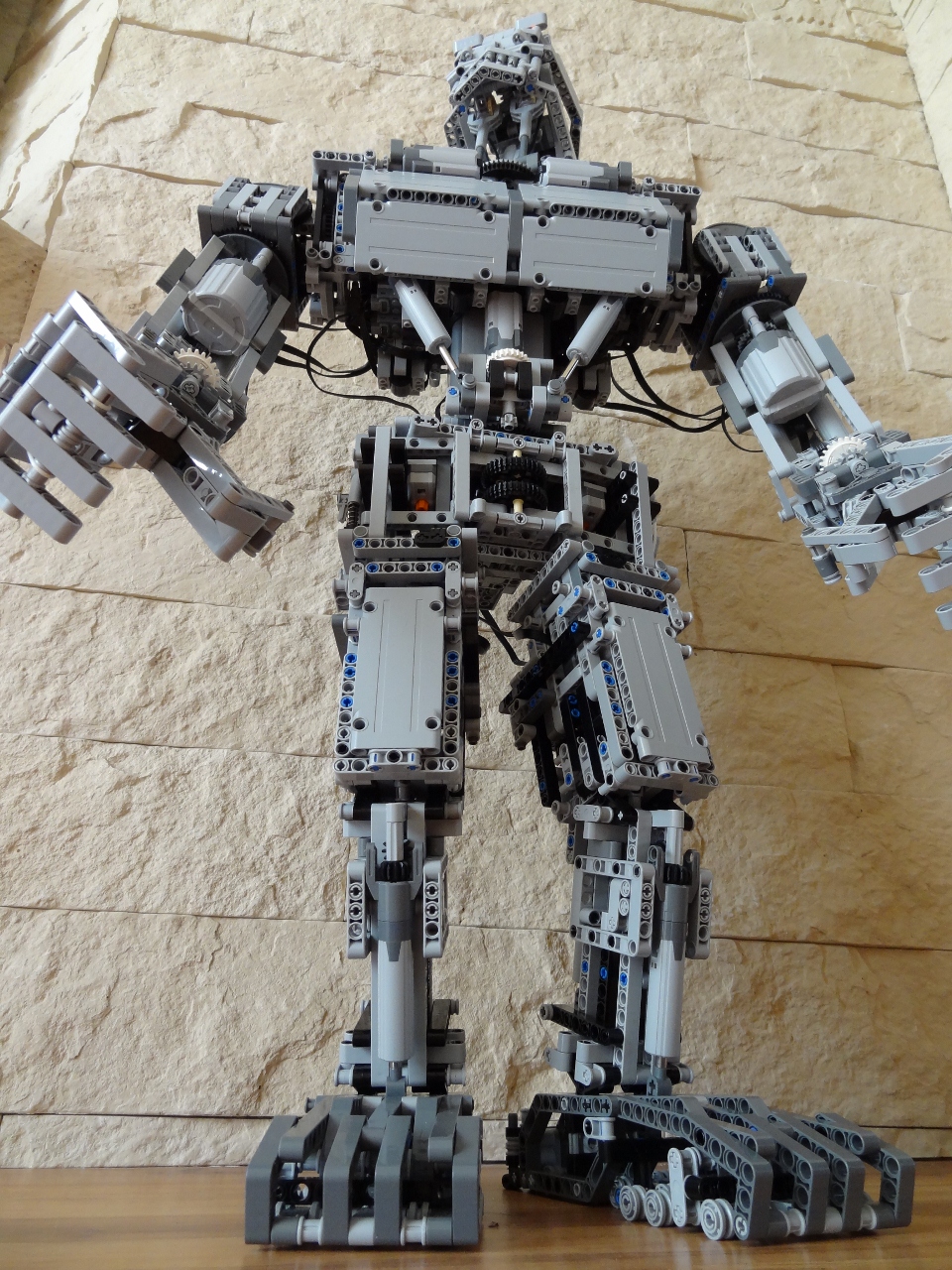
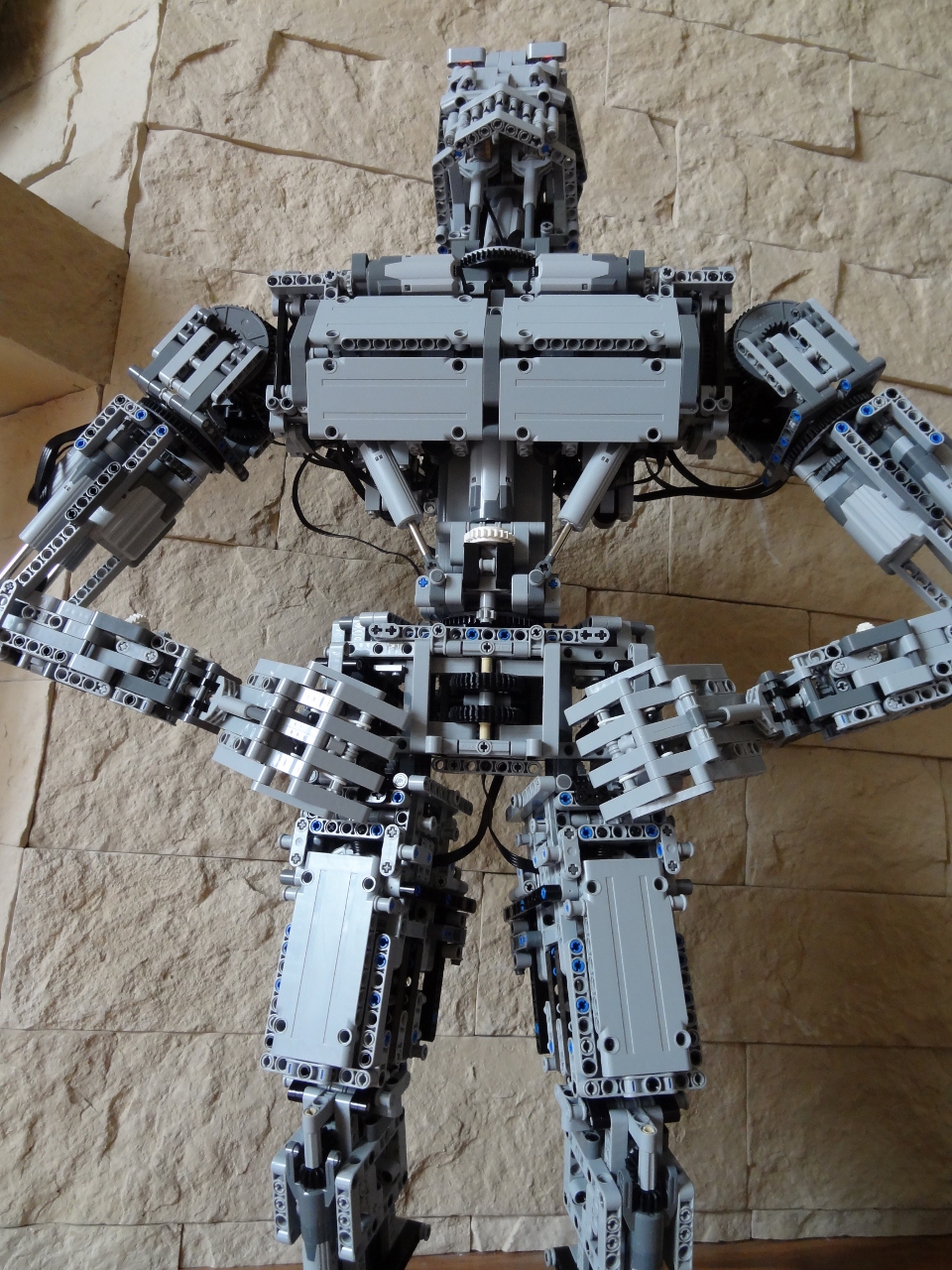
Dane techniczne:
wysokość – 74 cm
wysokość z podniesionymi rękami – 92 cm
waga – 4,2 kg
rozstaw rąk – 107 cm
długość nogi – 30 cm
długość kroku – ok. 20 cm
12 - silników PF M
4 – silniki PF XL
8 – wież IR
2 – pojemniki na baterie
16 – siłowników śrubowych
135 – różnych zębatek
10 – obrotnic
2 – przełączniki PF
1 – światła PF
Robot posiada łącznie 16 funkcji ale w praktyce jest 14. W porównaniu do poprzednika są dwa pakiety baterii przełączane ręcznie, po 8 funkcji na jeden. Zrezygnowałem z elektrycznego przełączania ponieważ zabierało to 3 funkcje do tego był problem z miejscem na trzeci pakiet baterii i mechanizmem do przełączania.
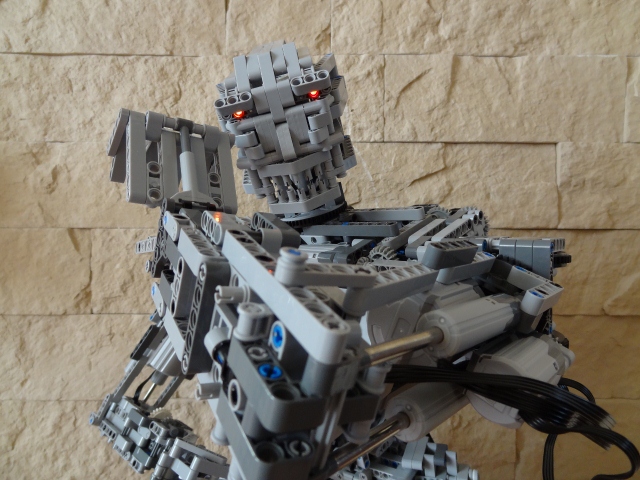
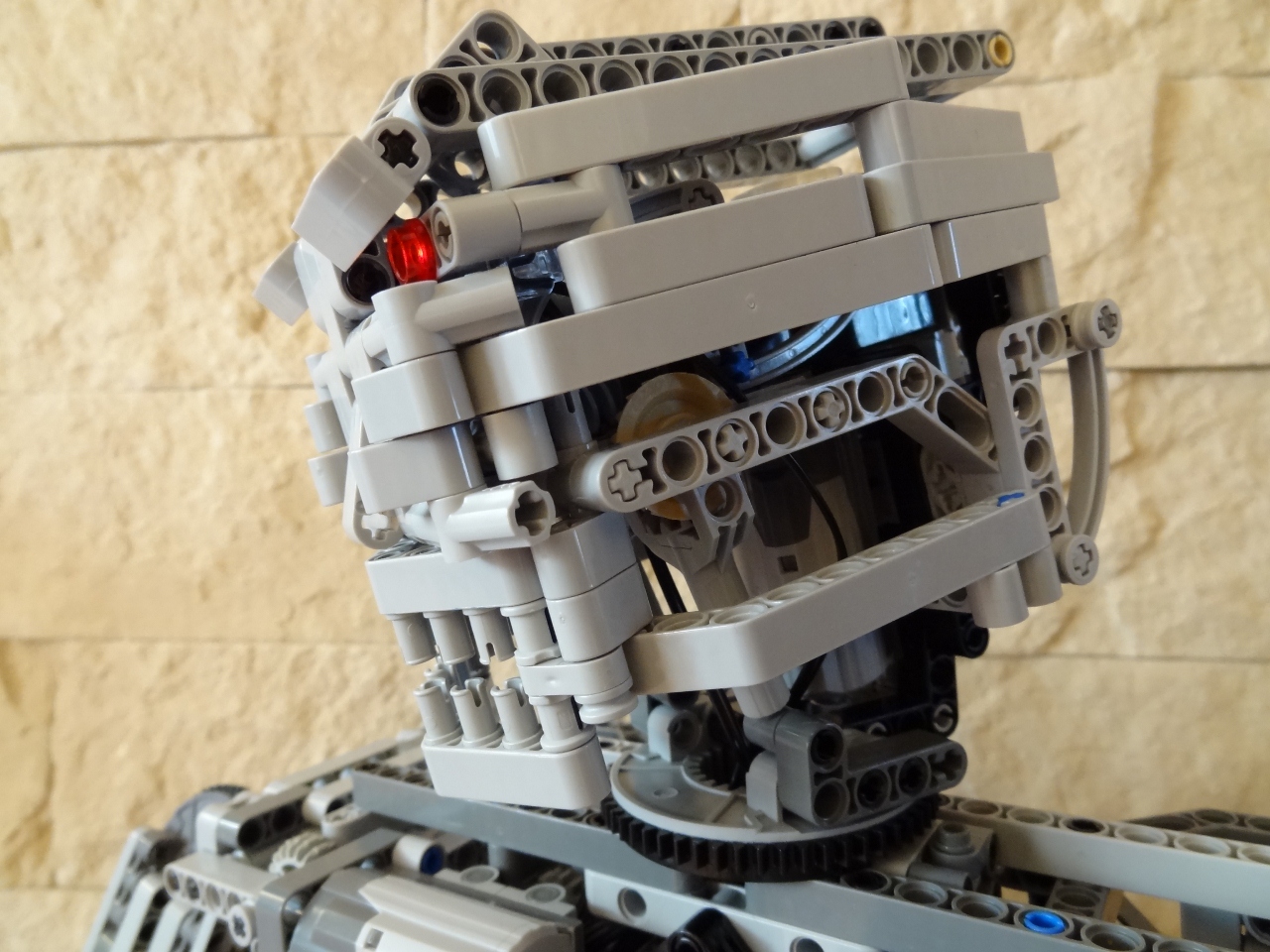
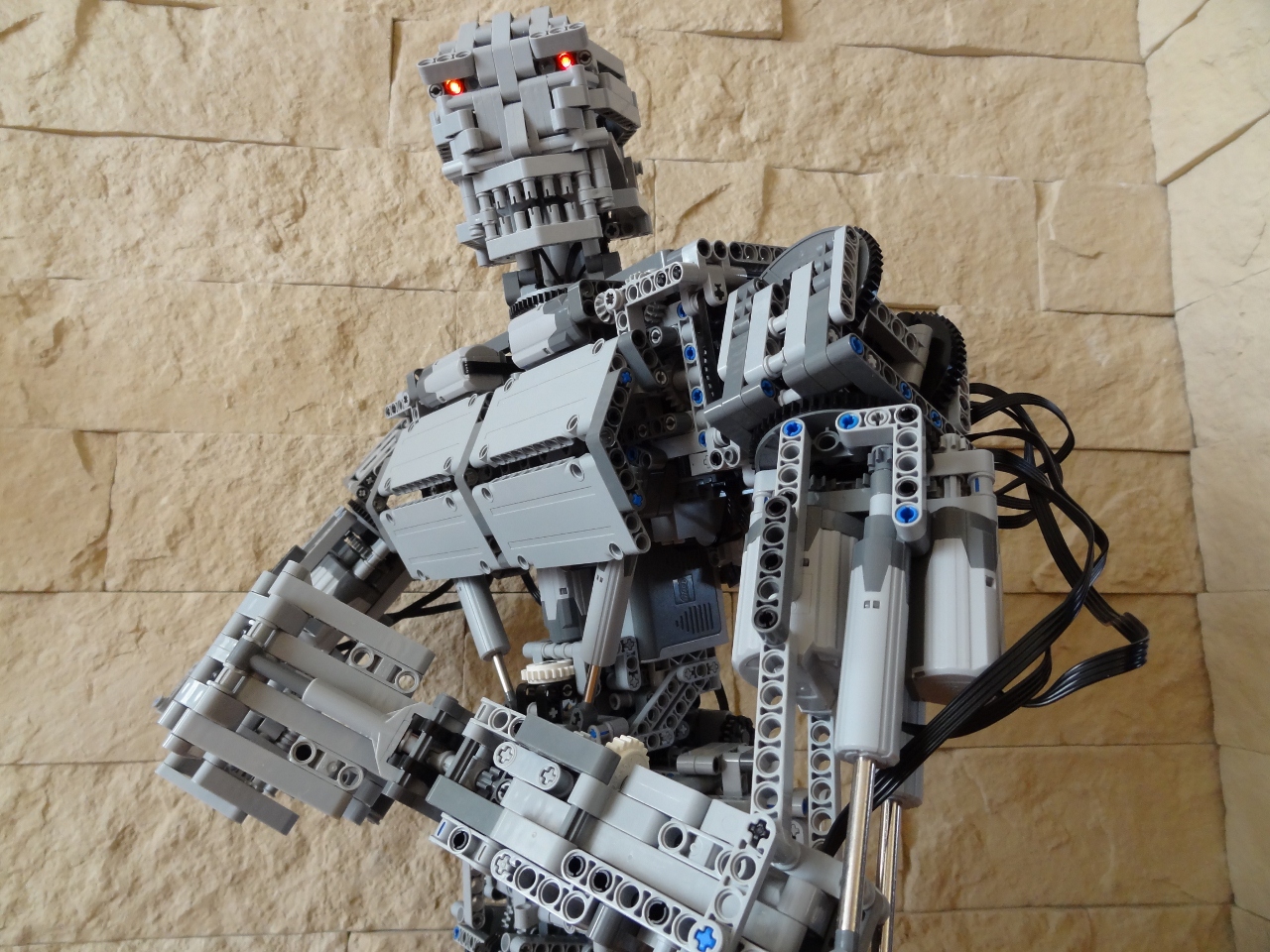
Głowa
Zmianie uległy następujące elementy:
- szczęka została cofnięta (w poprzedniku za mocno wystawała)
- oczy są mniejsze i również cofnięte a także lekko schowane z możliwością regulacji brwi
- twarz została zabudowana i lepiej ukształtowana ( znikneły zębatki)
- wszystkie mechanizmy zostały od nowa zbudowane a dodatkowo usprzęglone
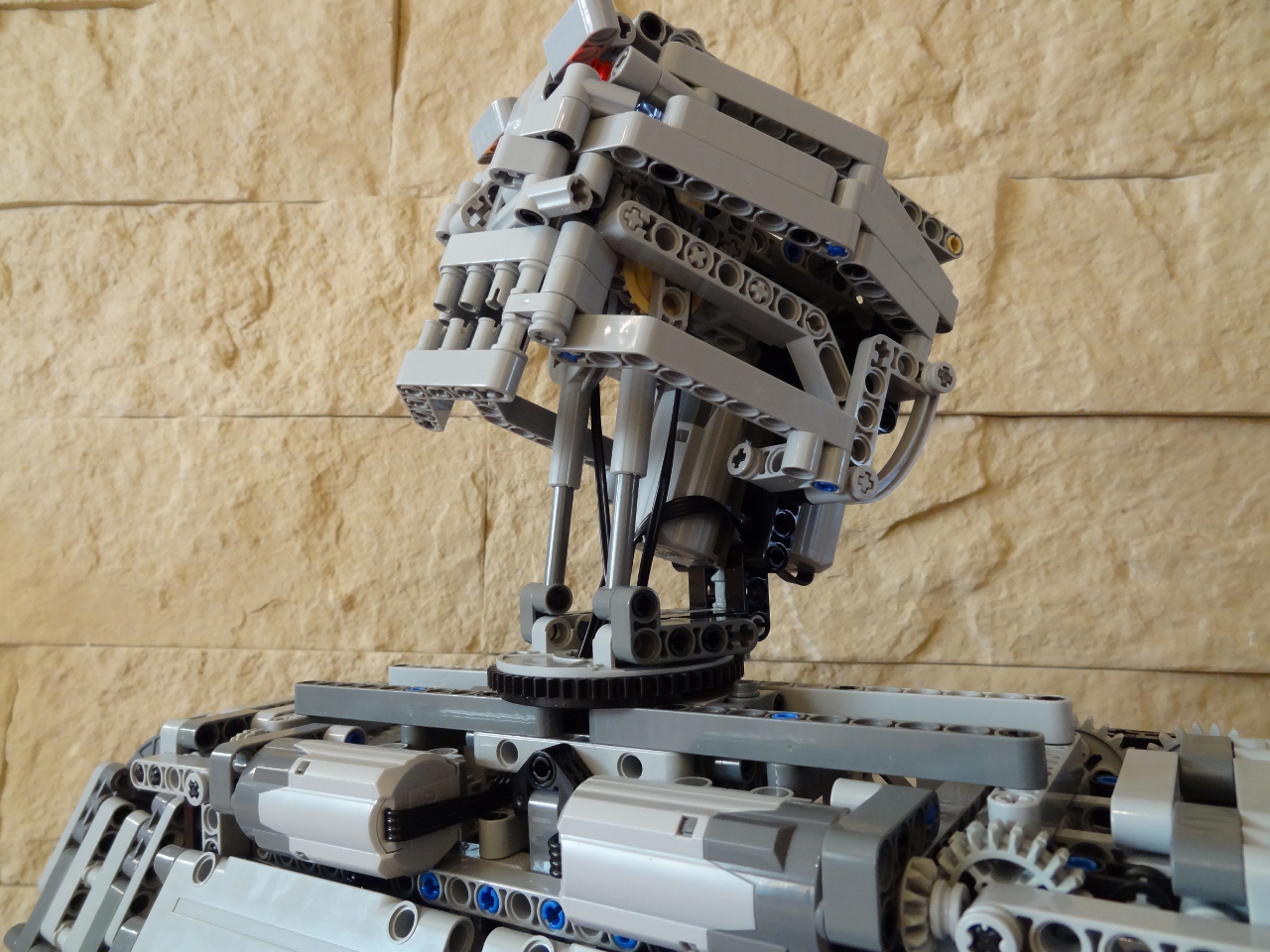
- głowa porusza się w górę/dół oraz na boki z ograniczeniem
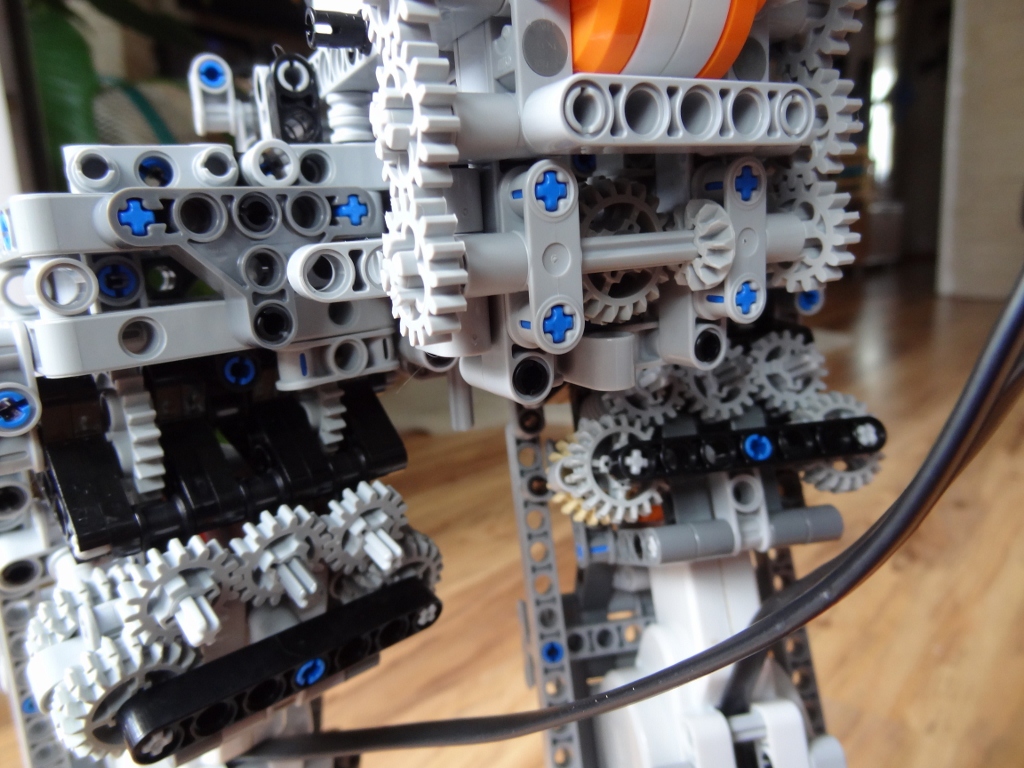
W porównaniu do poprzednika głowa zyskała na stabilności (nie ma przegubu kulowego który generował luzy). Małe siłowniki są teraz połączone razem (nie tworzą luzów). W poprzedniku silnik do obrotu głowy był w korpusie, tym razem jest w głowie. W głowie obecnie są dwa silniki które poruszają głową z odpowiednią prędkością. Dodatkowo mechanizmy są zabezpieczone sprzęgłem, tym razem nic nie zgrzyta.
Podnoszenie – z20 na płaską z12 - sprzęgło z24 na z8 – ślimak na z8 – płaska z20 na płaską z12 w siłowniku.
Obrót – z8 na sprzęgło z24 – kardan, z8 na obrotnice.
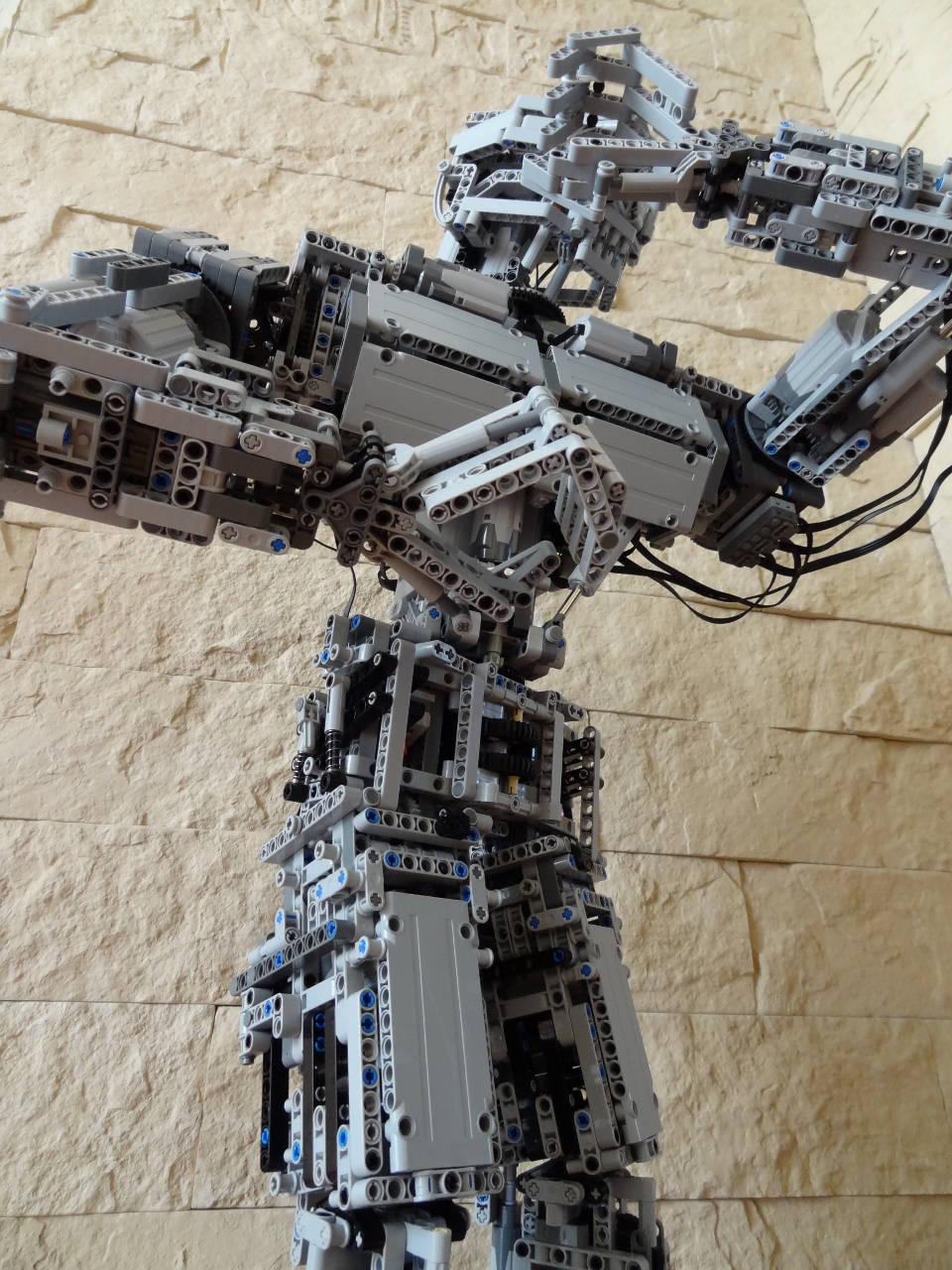
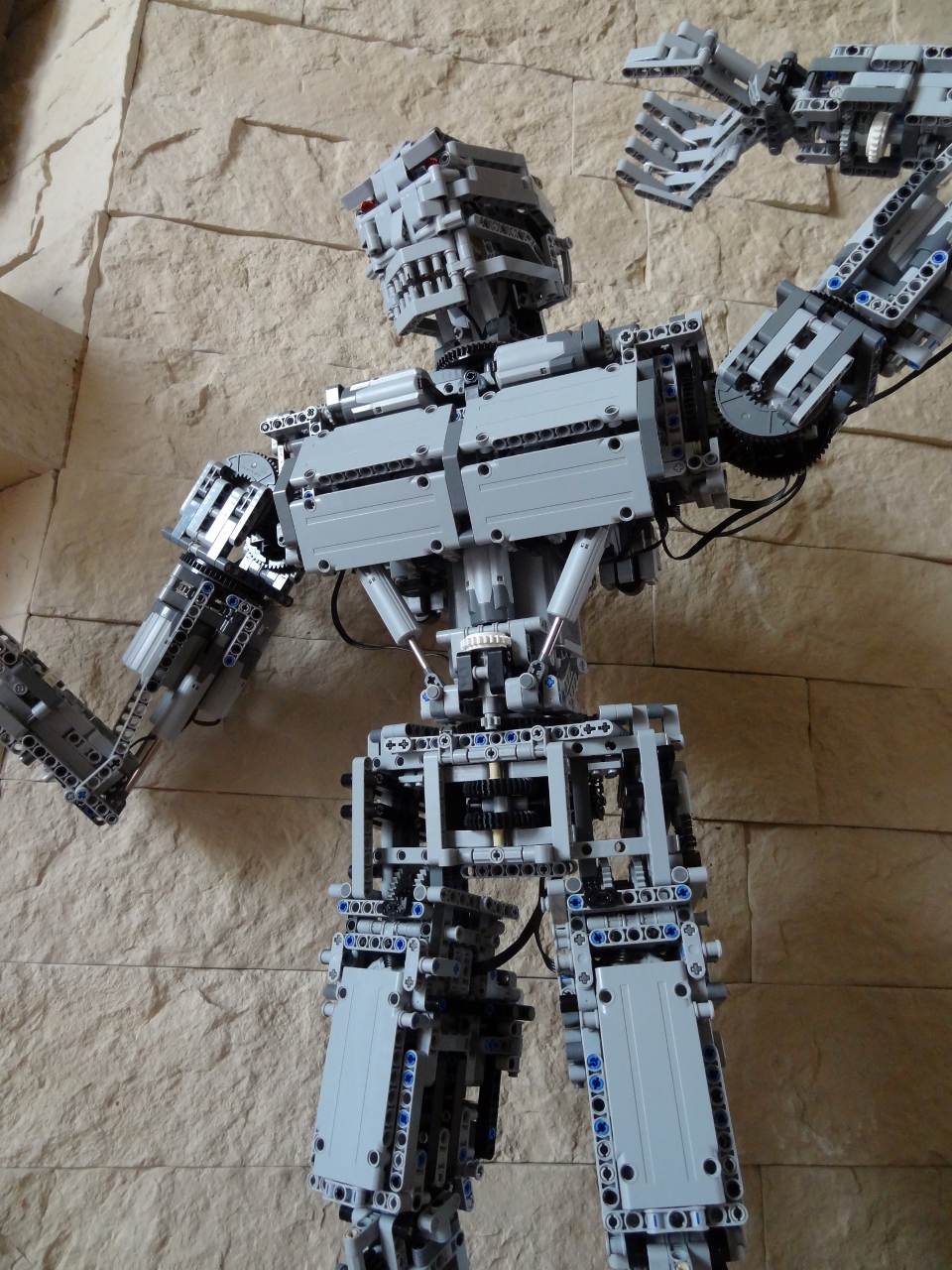
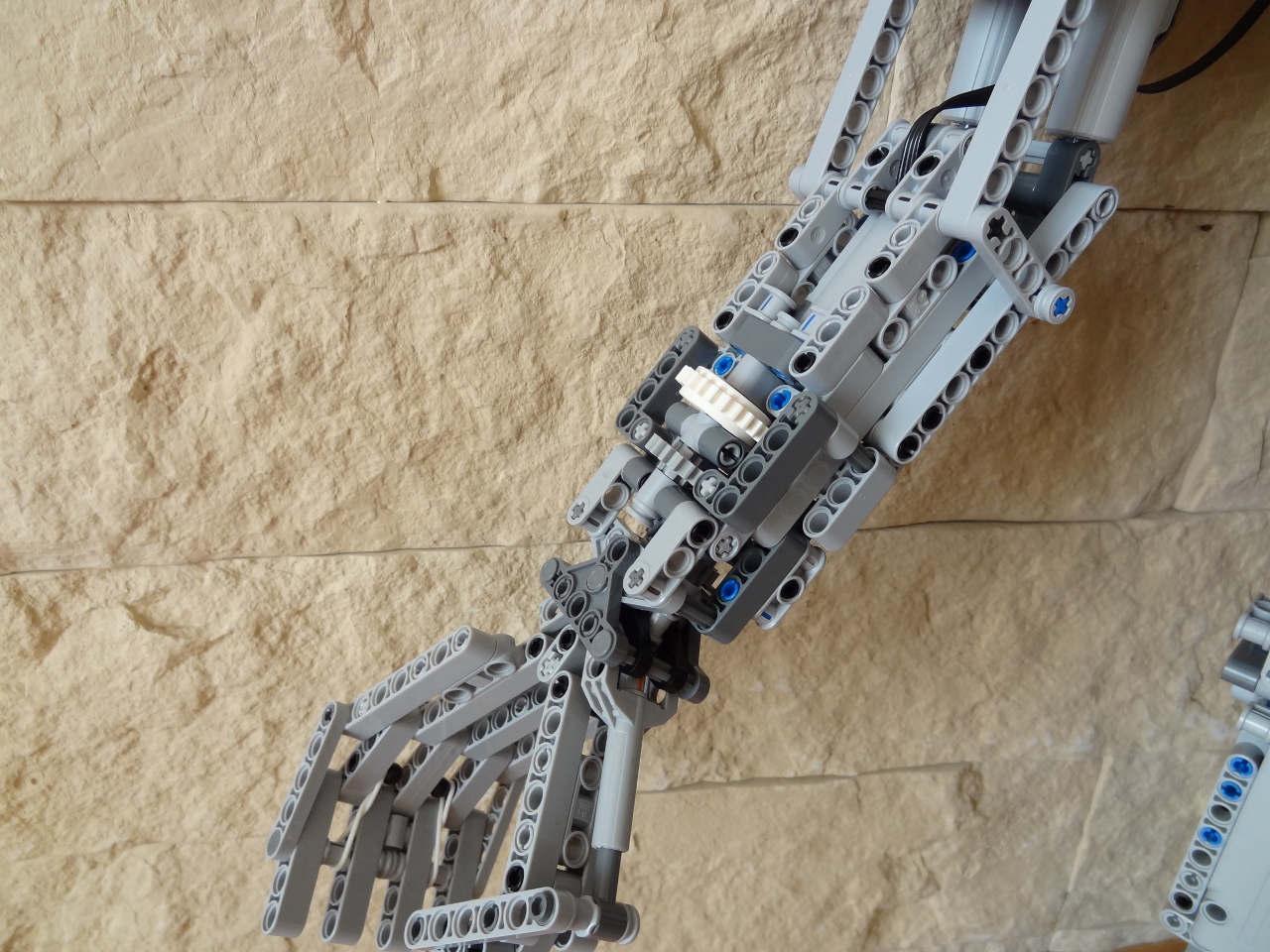
Ręce
Dłoń pozostała bez zmian, ale zmienił się mechanizm jej poruszania. Nie ma natomiast ruchomego nadgarstka. Zamiast tego jest obrót ręki w trzeciej płaszczyźnie, czyli góra/dół w bok i wokół własnej osi. Ruch łokcia i jego mechanizm jest niemal taki sam (zmieniła się tylko jego zabudowa). Ręka dzięki tej przebudowie zyskała na mniejszej wadze, jest też krótsza dając lepsze proporcje do reszty (choć i tak są za długie). Jeden z silników przeniesiony został do przedramienia co napewno miało wpływ na wydajność ruchu ręki. Moim zdaniem jest też ładniejsza.

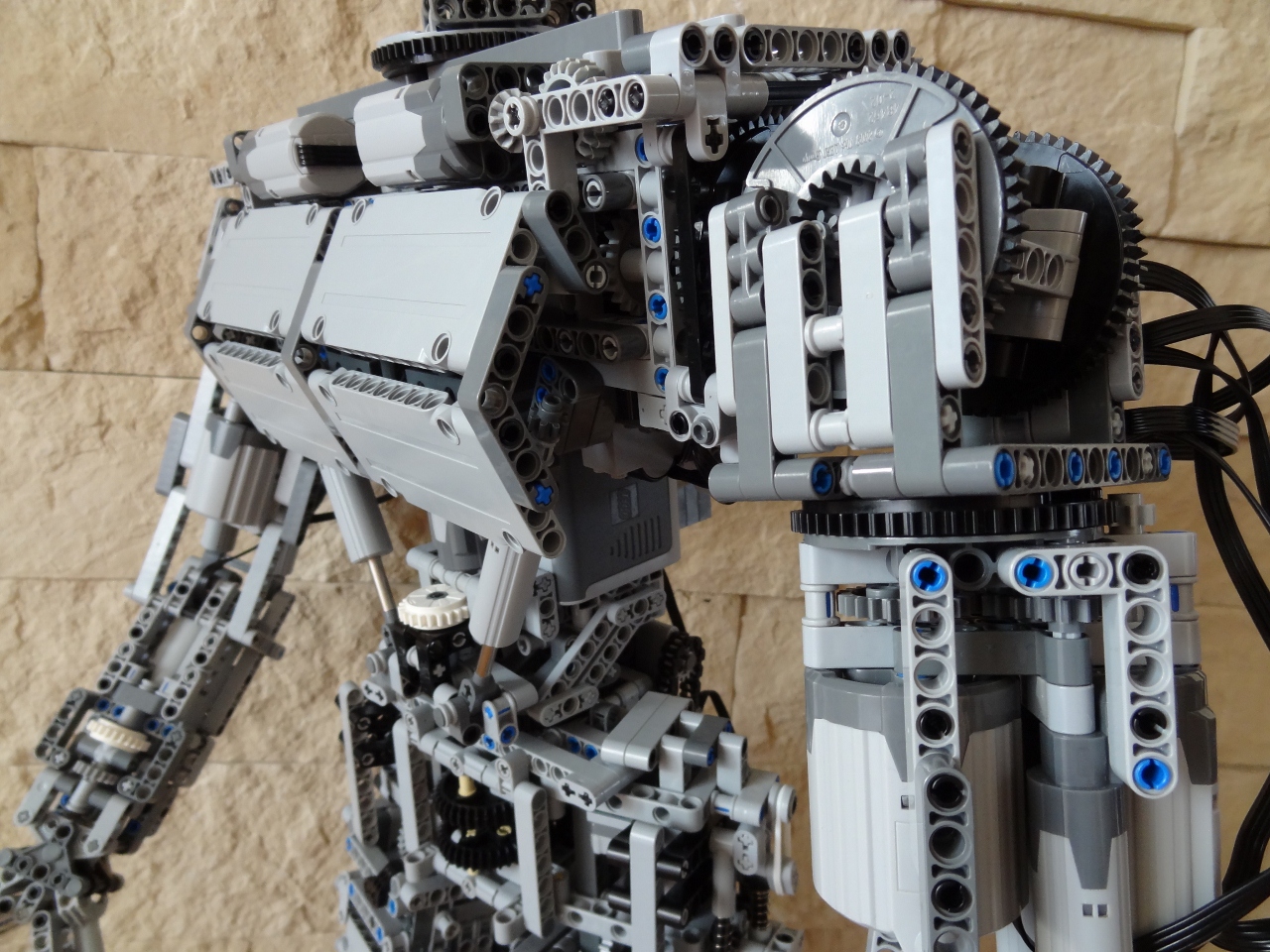
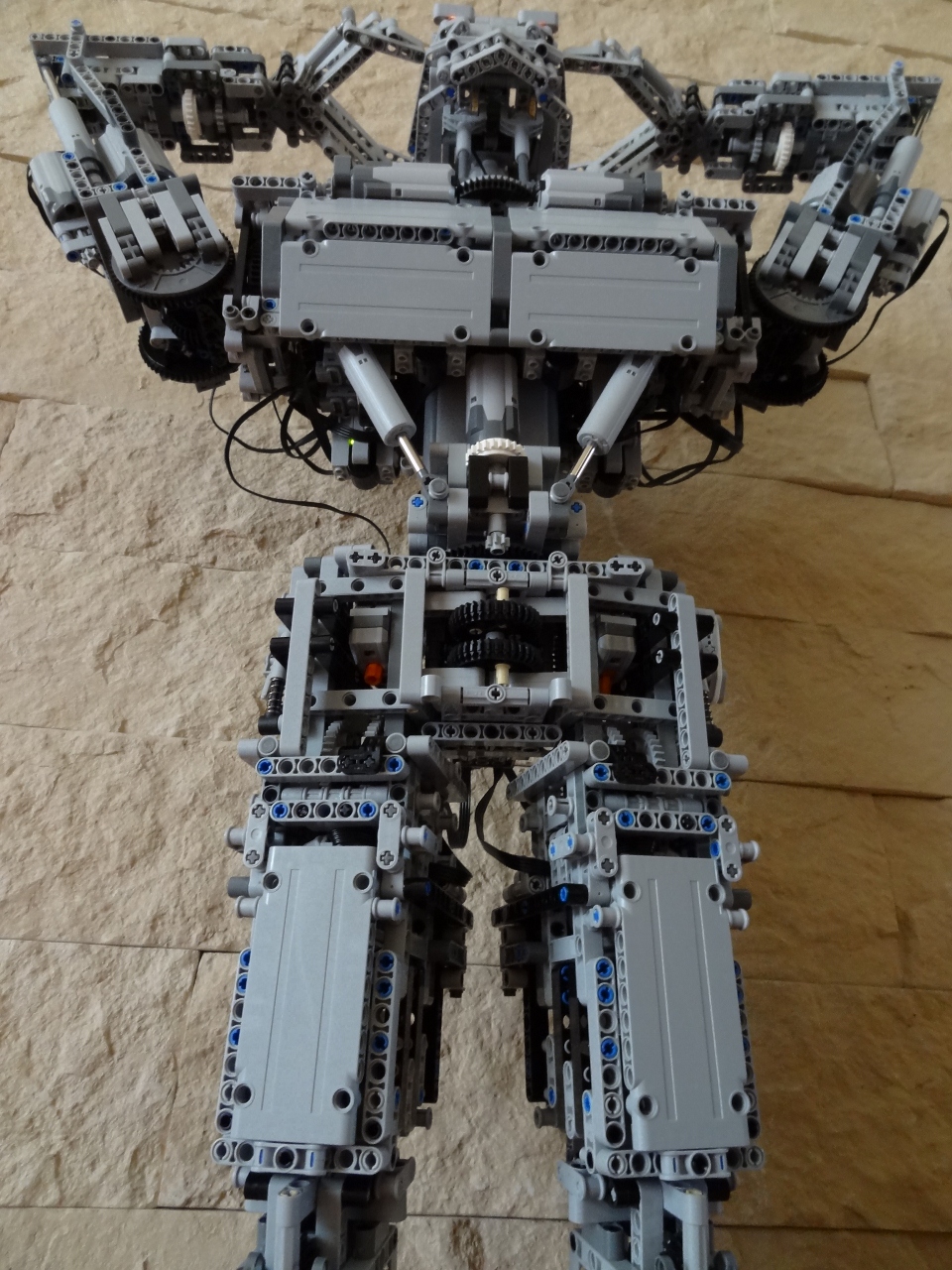
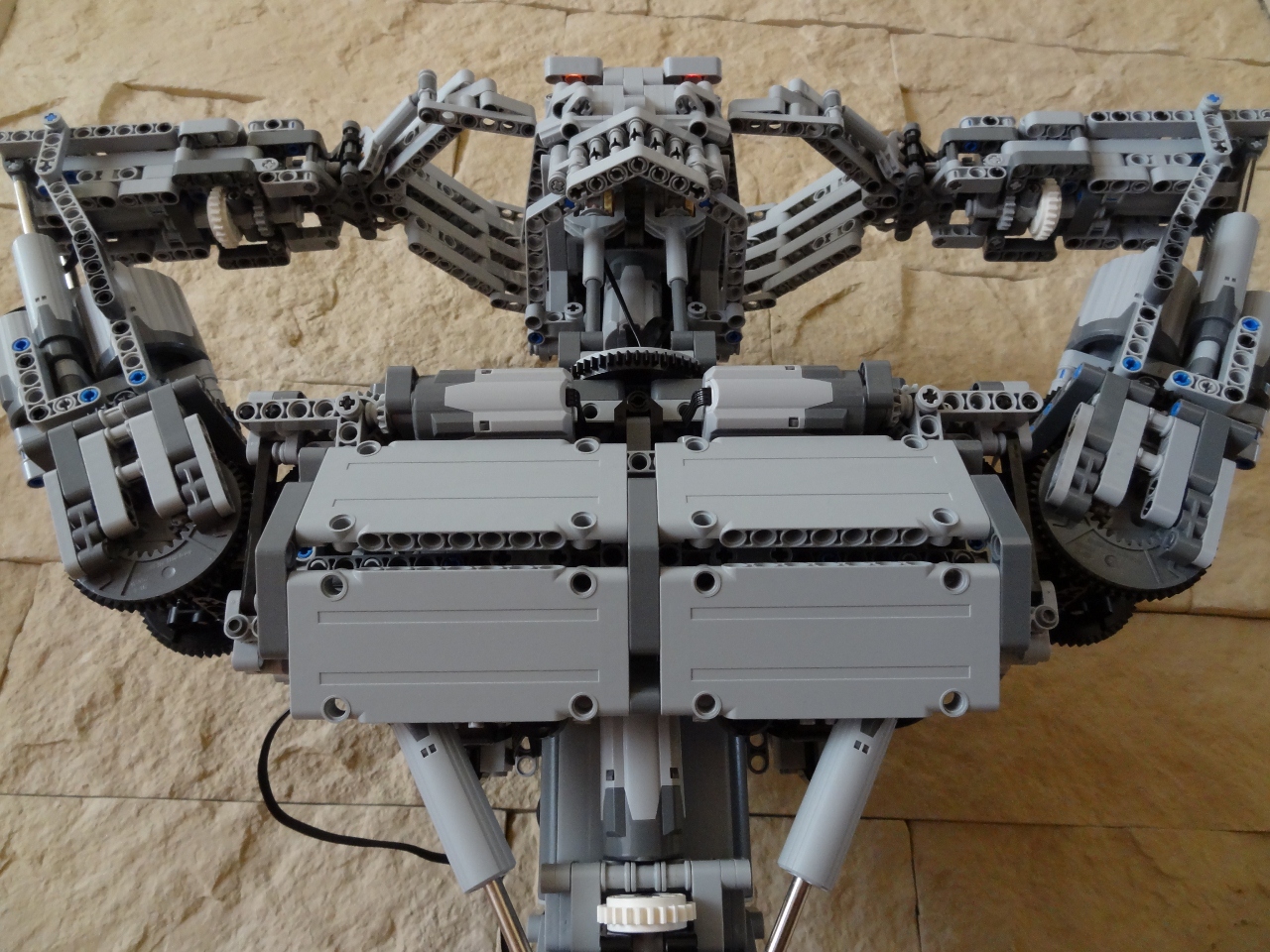
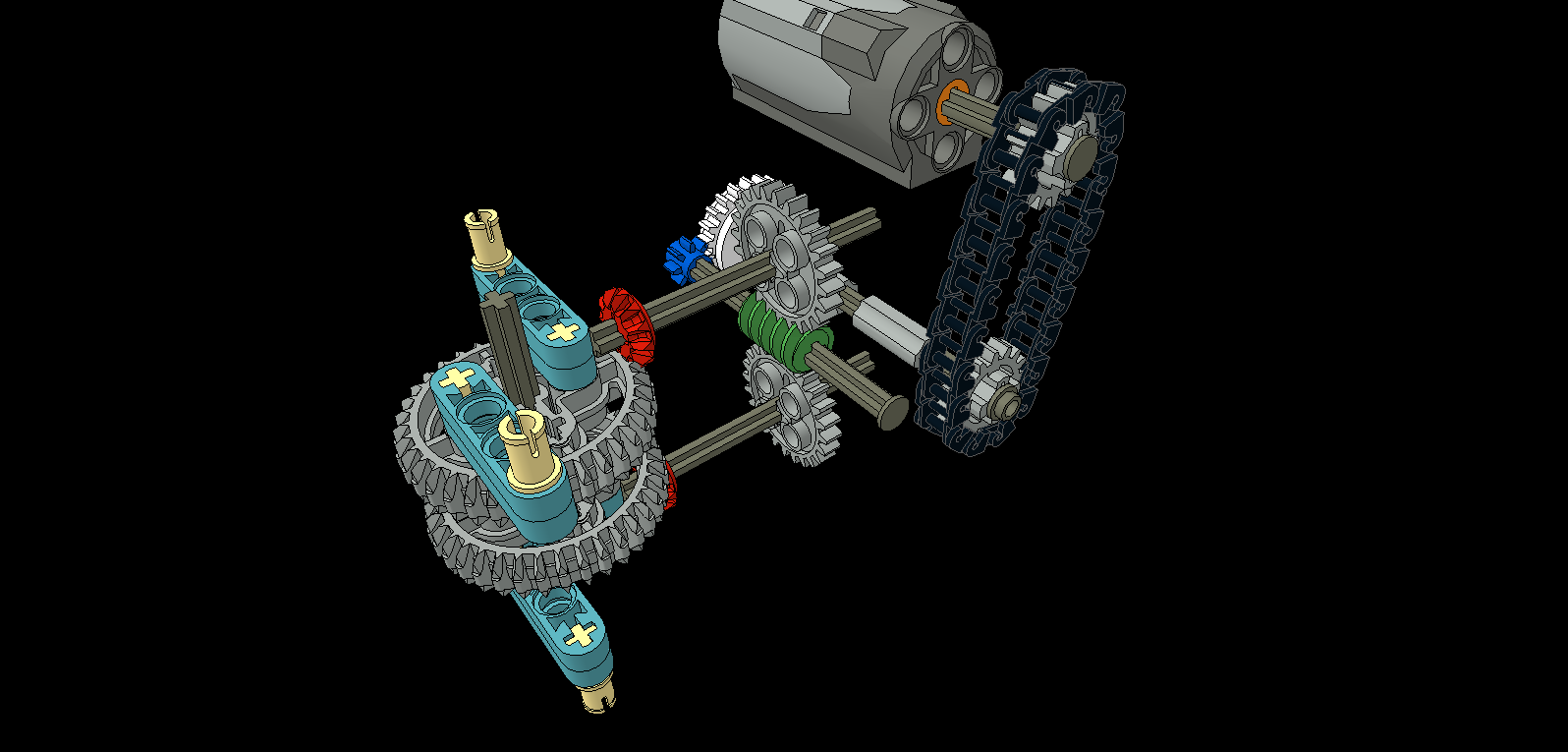
Korpus
W mechaniźmie podnoszenia ręki zamiast knobów są zębatki (płaska z12 na z20). W mechaniźmie wychylania ręki zamiast podwójnego sprzęgła są dwie z24. Zmianom uległa cała reszta w dół. Najważniejszą z nich jest sposób połączenia pakietów baterii. Zależało mi aby w miare łatwy sposób można było wymontować pojemniki z bateriami. Z dołu i z góry wystarczy wyjąć długie axle oraz rozpiąć małe axle przy siłownikach. Siłowniki nie wykonują żadnej pracy czynnej, służą jedynie do stabilizacji i napinania luzów na pakietach baterii. Cały korpus spoczywa na obrotnicy która obraca całością. Za obrót odpowiada mały silnik ze sprzęgłem.
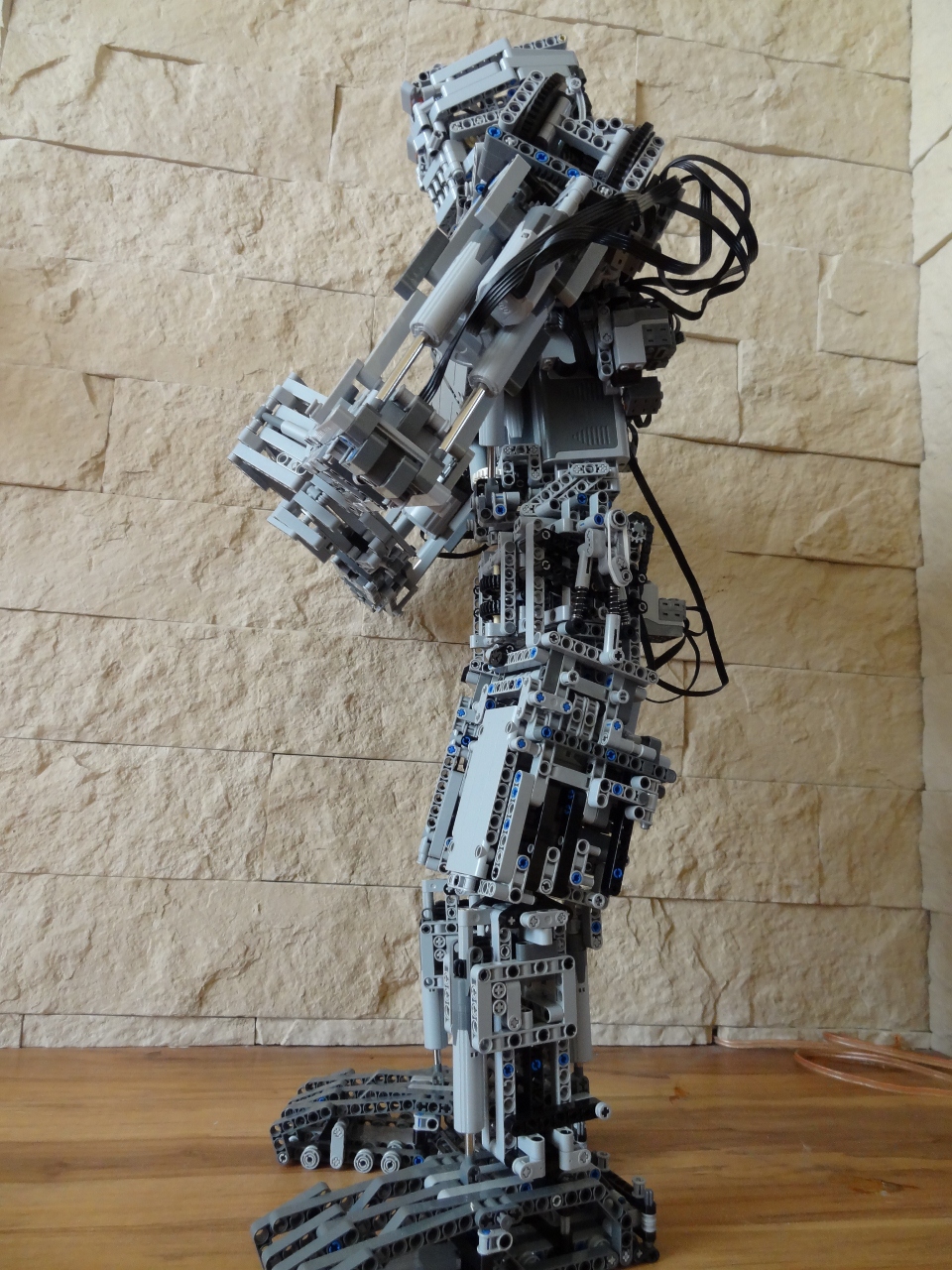
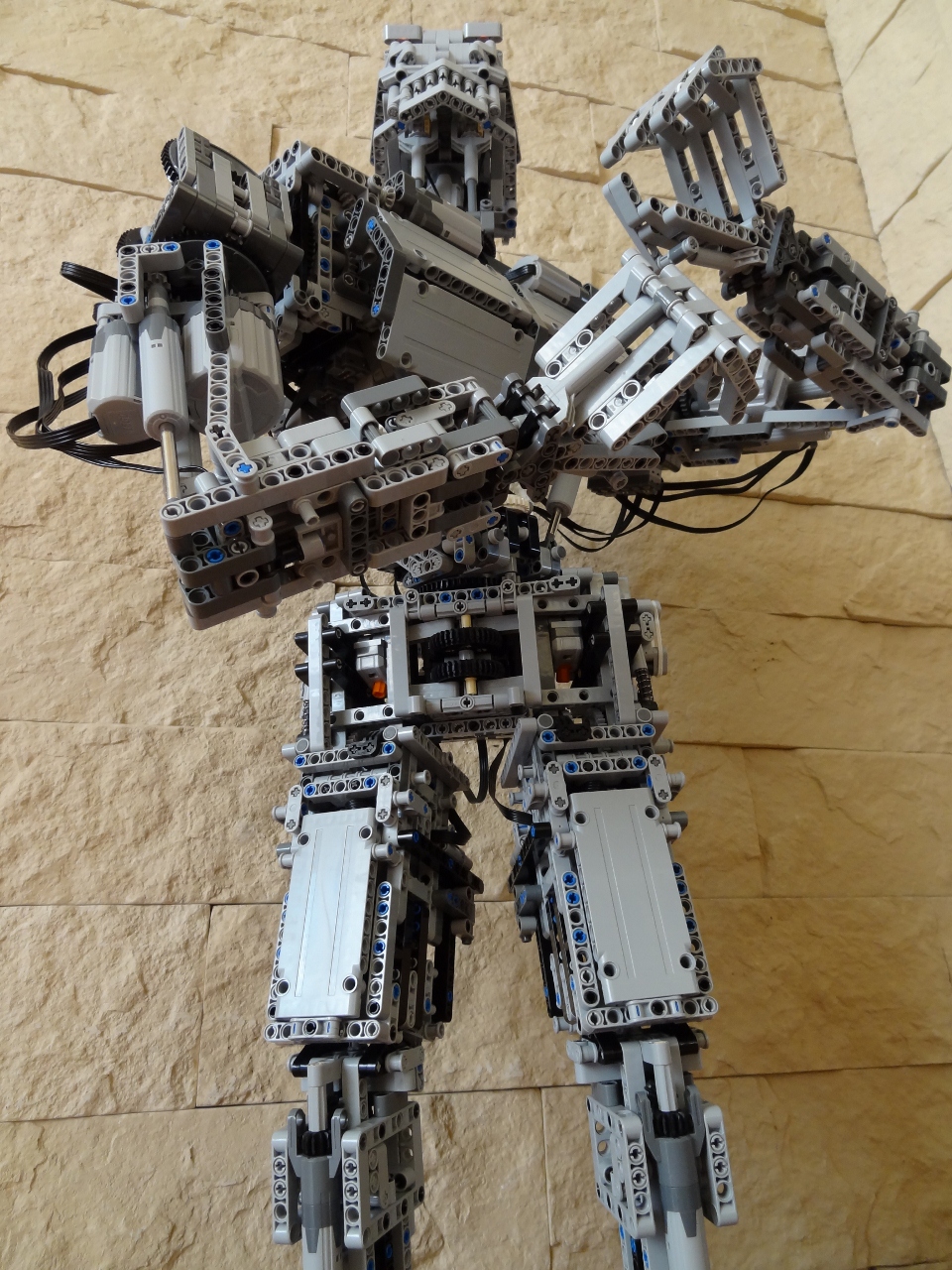
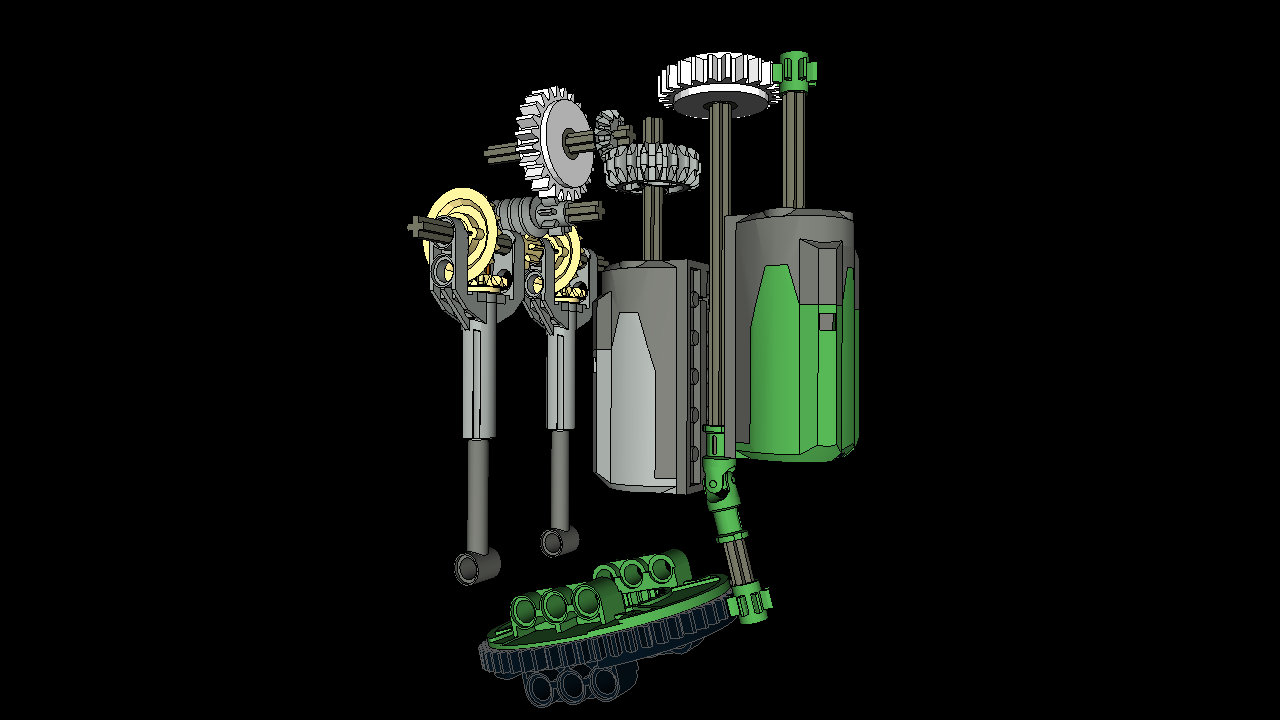
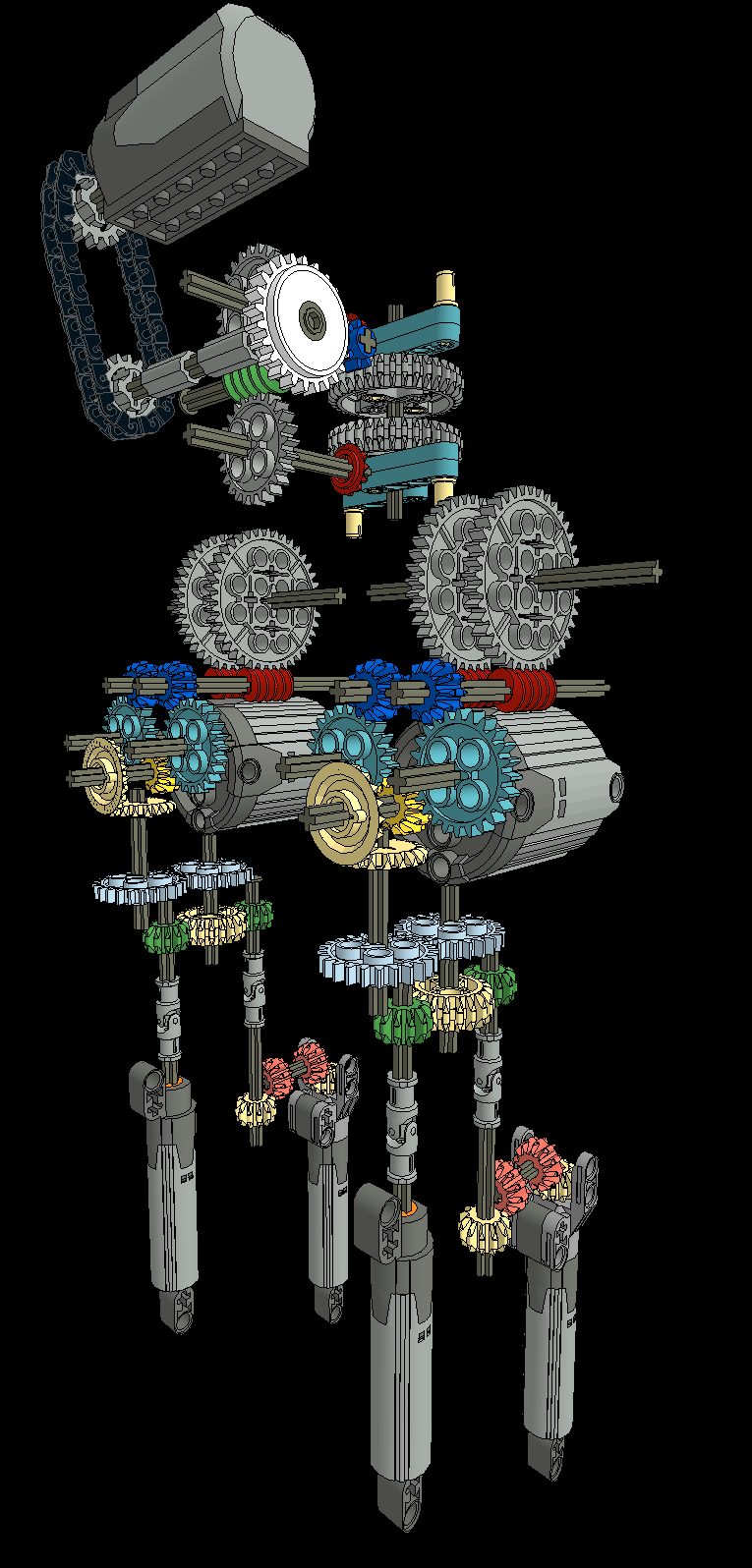
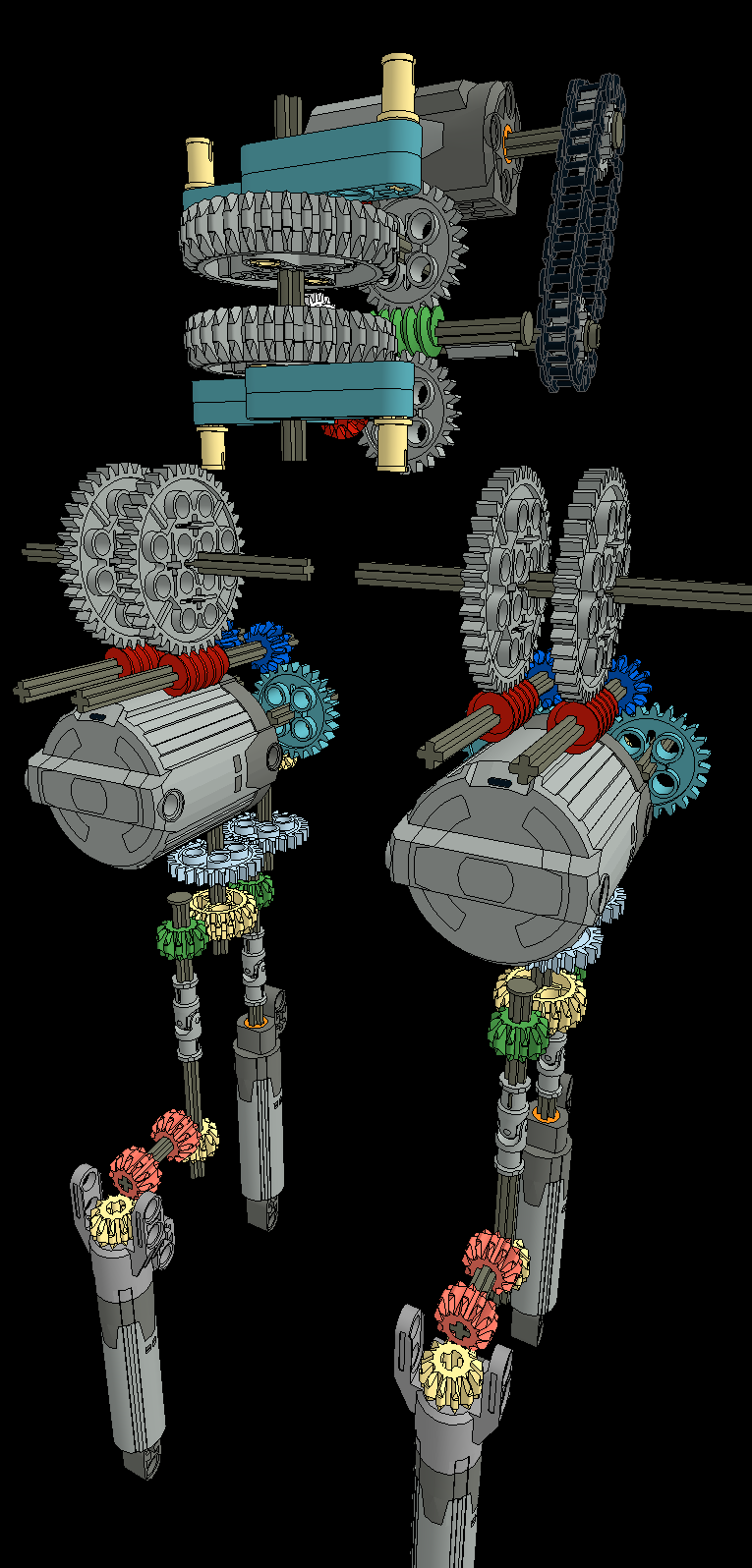
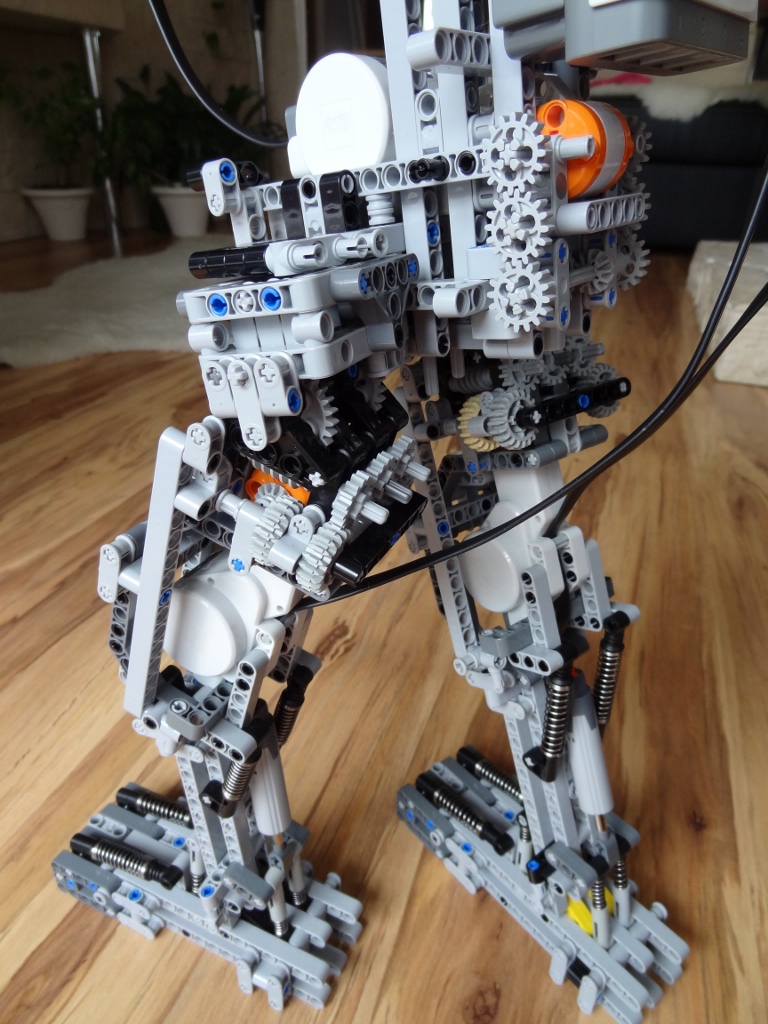
Nogi
ROBOT NIE CHODZI. Tak, nad nogami spędziłem mnóstwo czasu. Wypróbowałem kilka par nóg i nic. Na początku podczas planowania wymyśliłem sobie rozchylanie nóg. Teoretycznie miało to służyć skręcaniu podczas automatycznego chodzenia. Krótko mówiąc po włączeniu chodzenia na pilocie o zmiennej regulacji w odpowiednim momencie nogi miały się rozchylać i chować powodując zmianę kierunku. Praktyka jednak pokazała co innego. Rozchylanie jest głównym powodem dlaczego robot napewno nie będzie chodzić. Mechanizm powoduje duże luzy przez co robot nie może utrzymać pionu. Oprócz tego nogi są ze sobą połączone jedynie elektrycznie (w trybie automatu). Brakuje im połączenia mechanicznego które nie pozwalało by na występowanie pewnego zjawiska. Niestety połączenie mechaniczne jest możliwe tylko gdy nogi pracują równolegle.
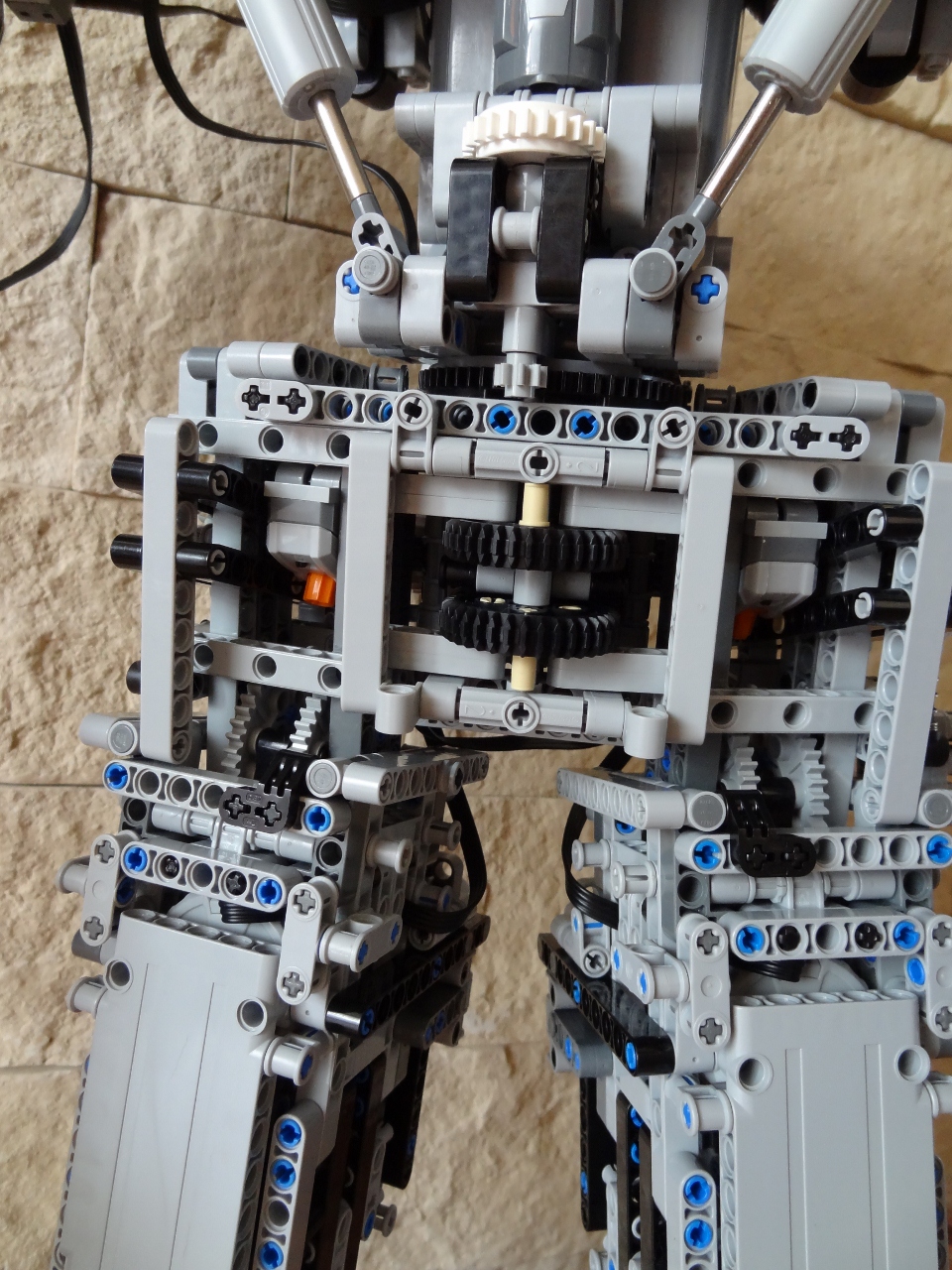
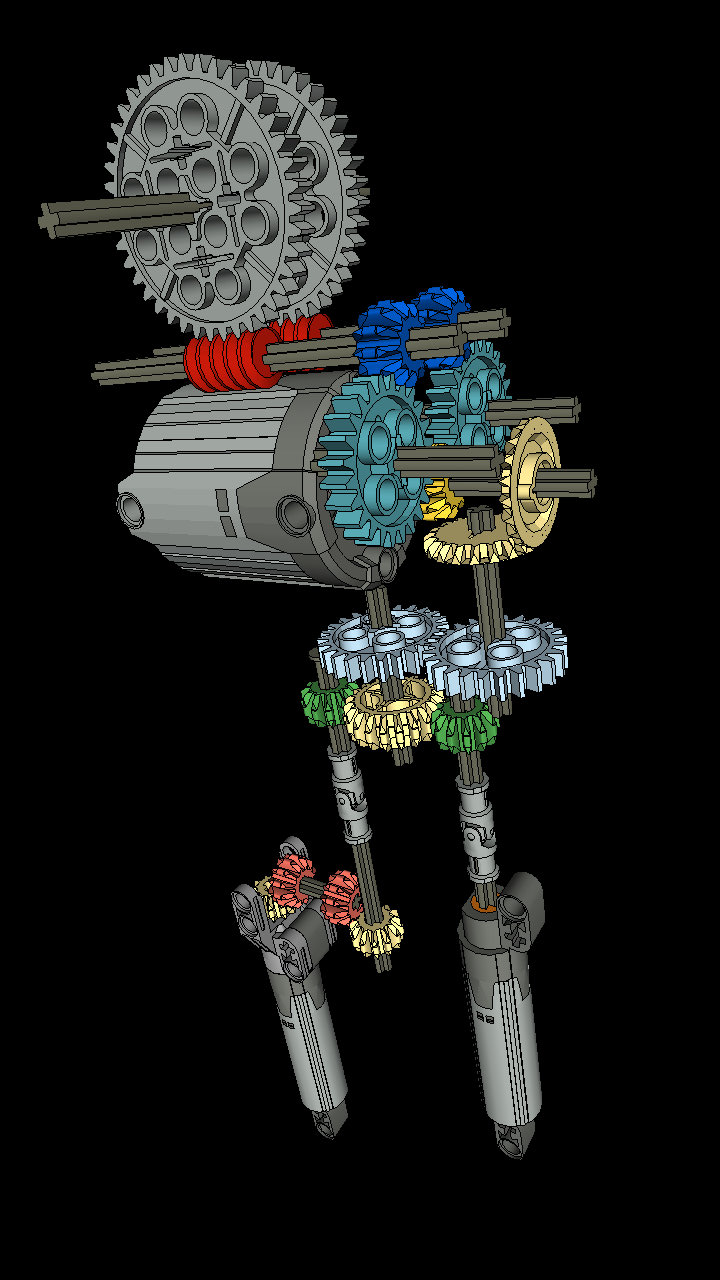
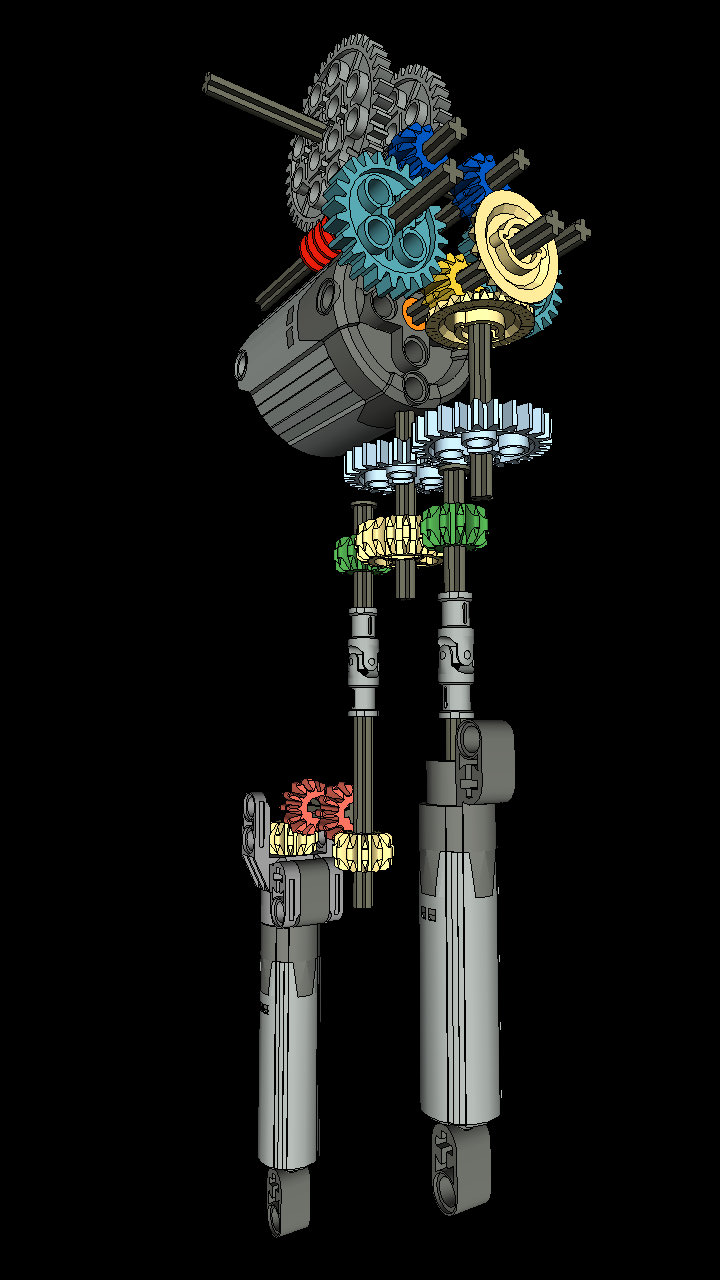
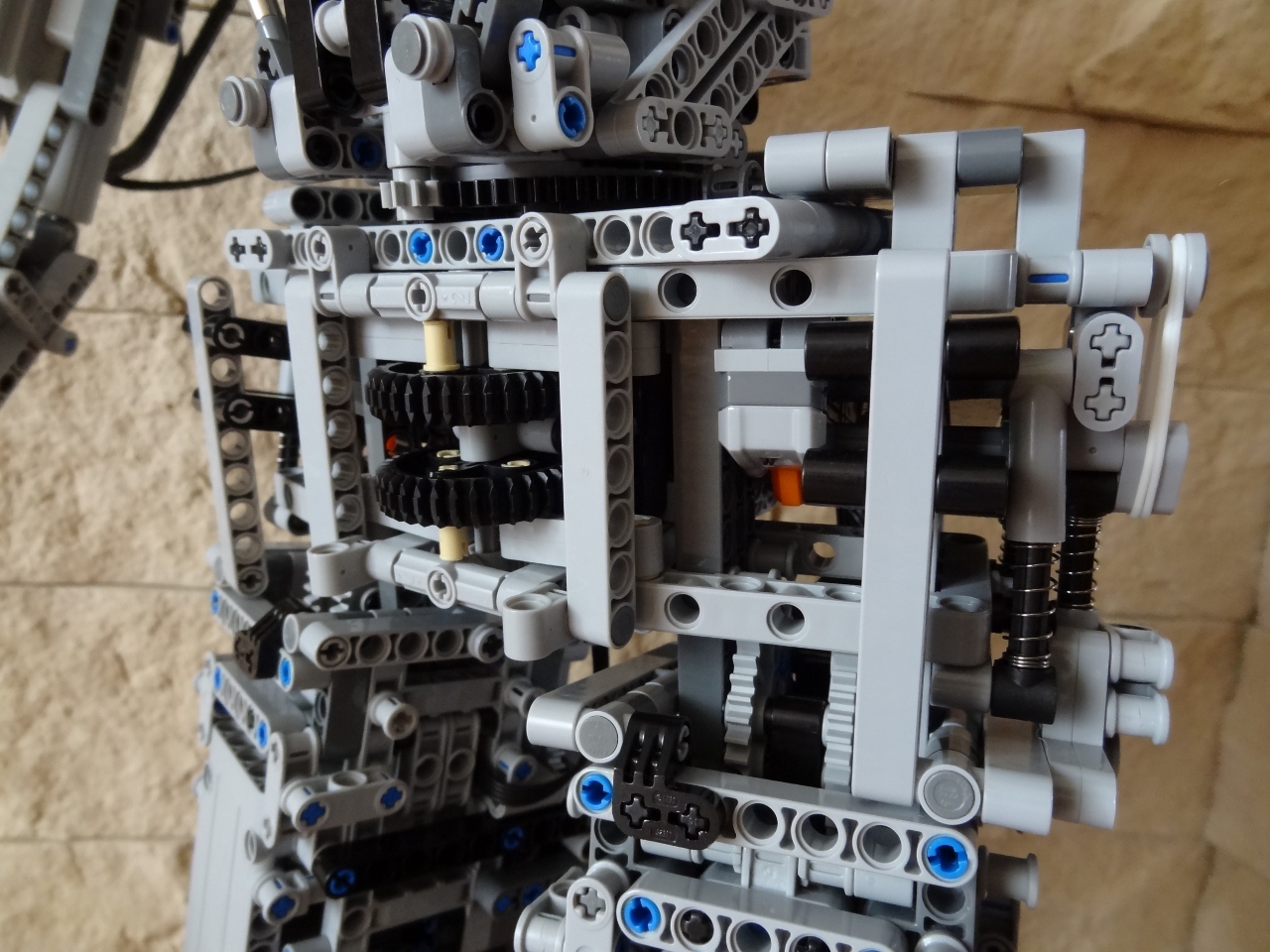
Nogi zbudowane są z trzech części: stopa, łydka i udo. Mechanizm główny znajduje się w udzie, jest tam też silnik PF XL który odpowiada za cały ruch nogi. Mechanizm główny napędza podwójny ślimak, a one z kolei podwójne zębatki z40. Układ miał być podwójny z dwóch powodów. Ślimaki są wedle siebie przesunięte o 180 stopni po to by nie robić luzów, oraz dla zwiększenia mocy. Od mechanizmu głównego poprowadzony jest napęd do dwóch siłowników. Jeden porusza kolanem, drugi stopą. Mechanizmy tych trzech elementów zostały dopasowane tak by powierzchnia stopy podczas ruchu była stale prostopadle do biodra.
Największą trudność sprawiło mi dobór odpowiednich zębatek i synchronizacja prędkości wysuwu siłowników z prędkością obrotową uda.
Zginanie nogi w kolanie miało na celu wywołanie niewielkiego przechyłu a tym samym powodowanie balansowania ciałem. Noga która idzie do przodu ugina się w kolanie, a ta która idzie do tyłu prostuje się w kolanie.
Nogi same dla siebie działają i chodzą. Po pewnym czasie można dojść do wprawy i nauczyć się nimi skręcać. Wymaga to jednak indywidualnego sterowania każdą z nich.


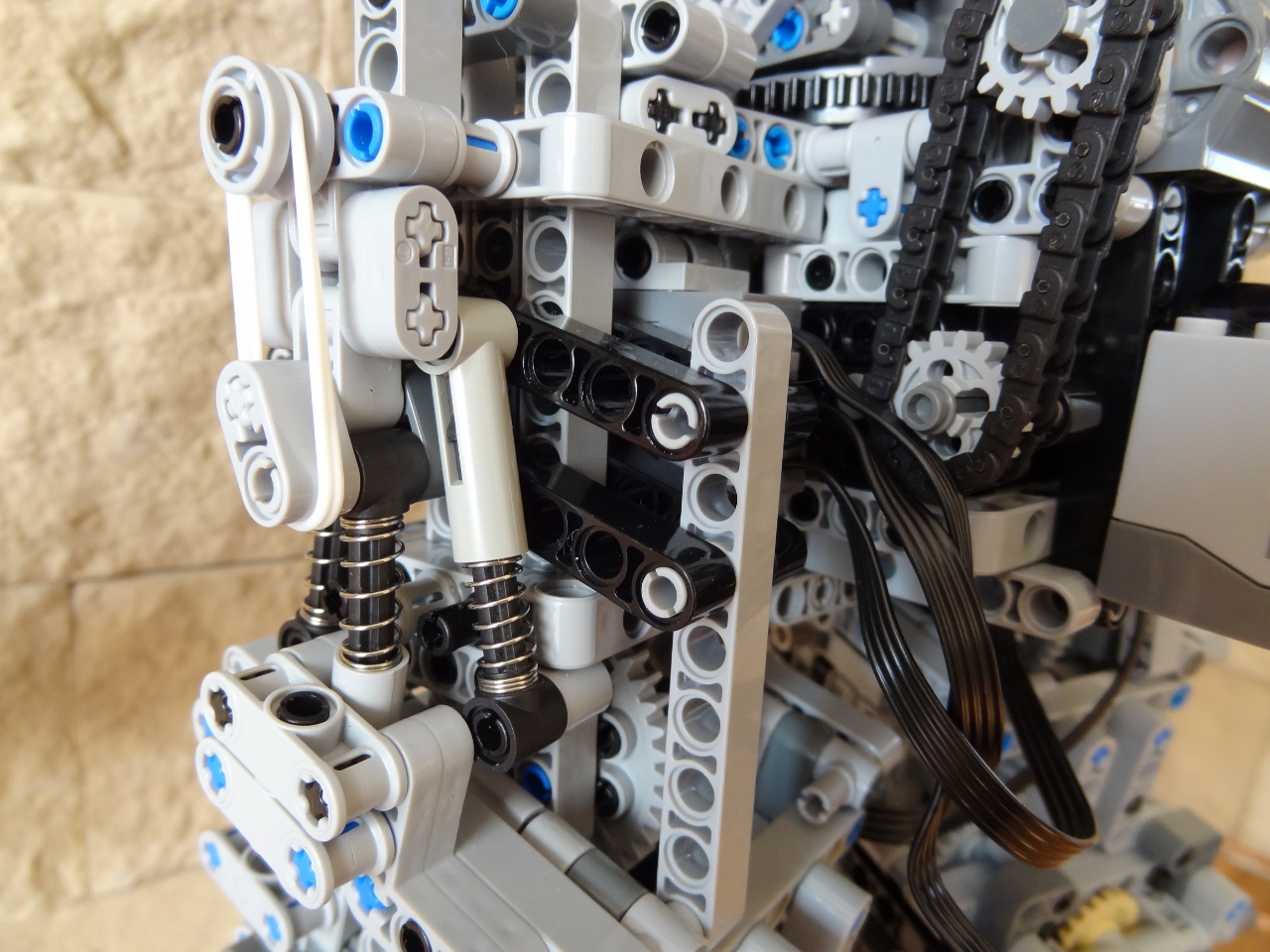
Wypróbowałem też mechanizm automatycznego chodzenia. Oparty jest na dwóch przełącznikach PF. Jeden przełącznik zmienia kierunek obrotu wzglądem silników, a drugi jest podłączony za pomocą axla do mechanizmu zmieniającego jego pozycję w odpowiednim momencie podczas ruchu nogi. Mechanizm ten wykorzystuje amortyzator i dwie legowe gumki w celu szybkiej, gwałtownej i niezależnej elektrycznie zmiany położenia przełącznika. Niestety ma on punkt zero który musi być szybko ominięty. Nogi z mechanizmem automatycznym działają dobrze ale tylko bez obciążenia. Pod obciążeniem dochodzi do pewnego zjawiska którego już nie będę opisywał.
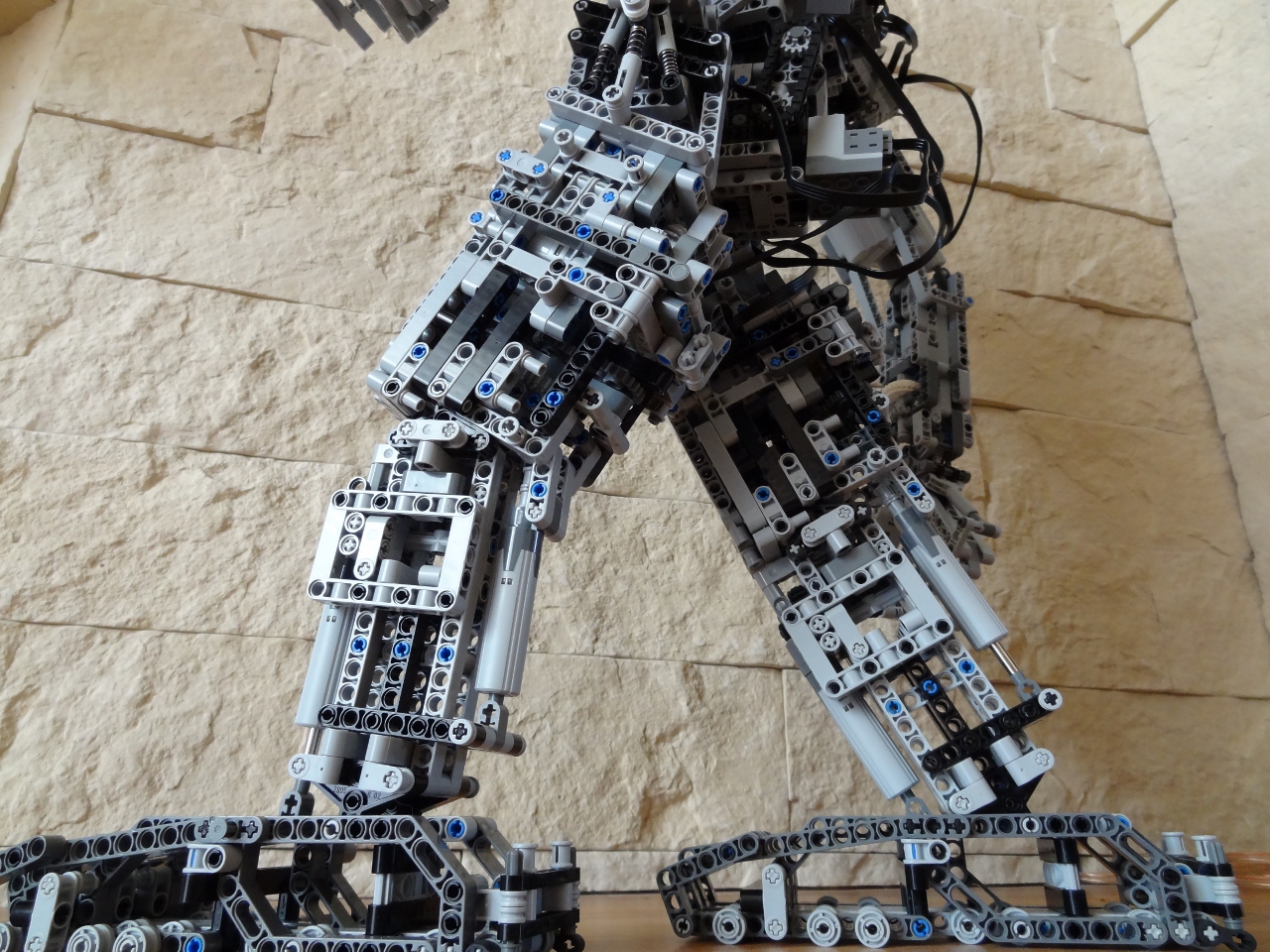
Podsumowując, niektóre rzeczy się udały inne nie. Nabrałem trochę doświadczenia i w przyszłości postaram się uniknąć niektórych błędów. Gdyby ktoś budował coś podobnego a interesują go szczegóły to niech pisze. Na koniec wspomnę że pierwsza para nóg była z NXT więc dorzucam kilka zdjęć dla porównania.



Filmy są dwa. Pierwszy pokazuje pracę samych nóg. Drugi całą resztę.
[youtube]http://www.youtube.com/watch?v=_ryhOpW9dXs[/youtube]
[youtube]http://www.youtube.com/watch?v=ih9aMJU_HHQ[/youtube]
Galeria
Więcej MOCy na moim kanale YouTube