Po długiej przerwie chciałem pokazać Wam mój pierwszy pojazd zdalnie sterowany, a zarazem trzeci, który jeździ z wykorzystaniem silnika :)
Chciałem zbudować pojazd, który stosunkowo szybko jeździ, skręca, pokonuje drobne przeszkody, fajnie wygląda, a przede wszystkim jest zdalnie sterowany. Chciałem.... :(
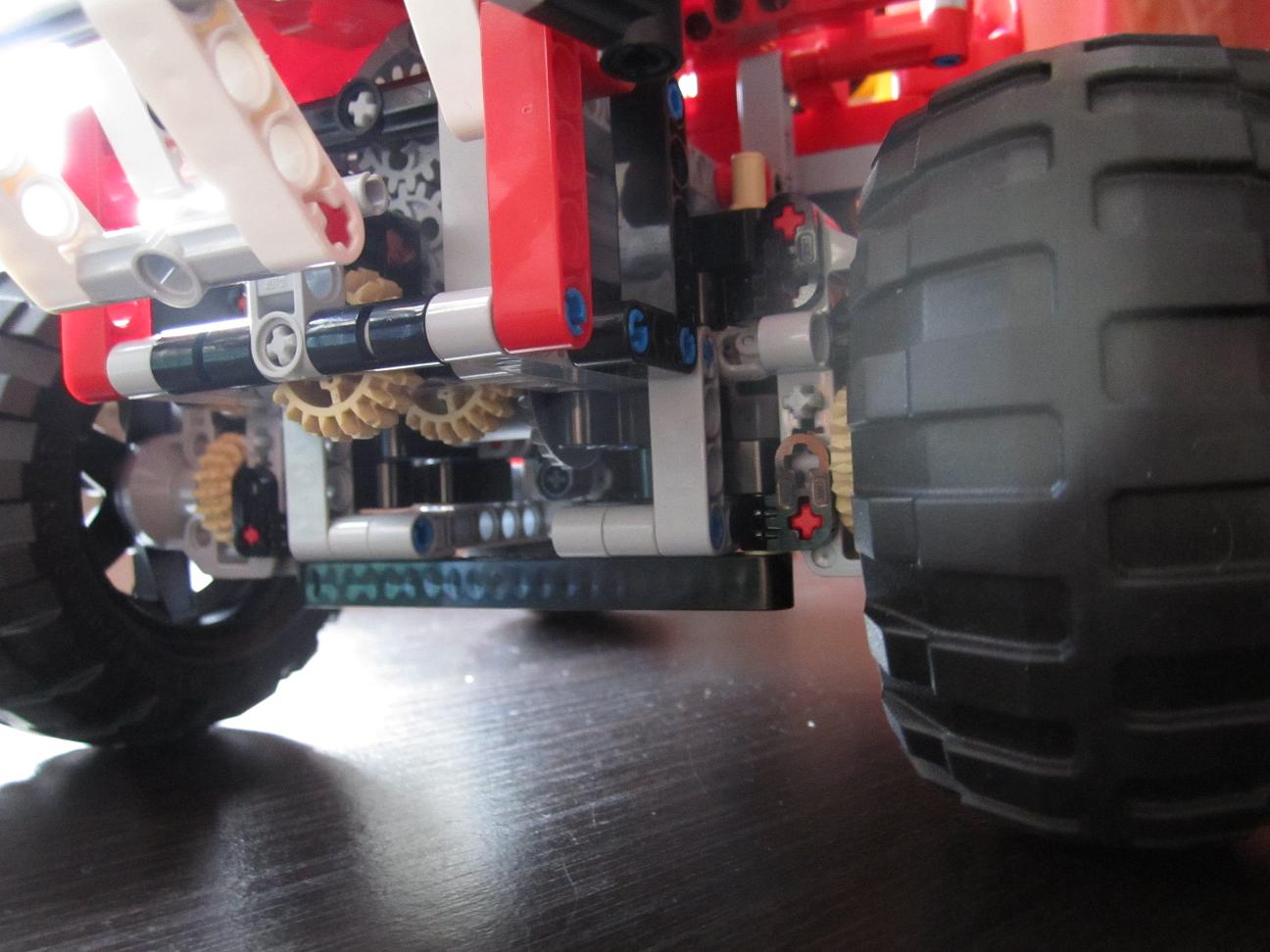
Kilka fotek (jak tylko znajdę czas na obrobienie, to umieszczę następne, no i oczywiście film):



Technicznie:
Napęd: 1XL z redukcją 3.89:1
Skręt przednich i tylnych kół realizowany przez 1 serwo
1 IR receiver
1 Battery box
Waga: 1.09 kg
Napęd:
Napędzana jest tylko przednia oś. Próba napędu na cztery koła prowadziła do strzelania zębatek, wykręcania axli, ponadto właściwości jezdne i zdolność do pokonywania przeszkód pozostawała nie zmieniona. Pewnie gdybym inaczej umieścił silnik (bardziej centralnie), problem zostałby rozwiązany, jednak wymagałoby to przebudowania całego podwozia. Dlatego postanowiłem pozostać przy pierwotnym rozwiązaniu.
Pisząc o mocy, to nie udało mi się jej odpowiednio wyważyć (jak również środka ciężkości) - przy mniejszym przełożeniu słychać strzały podczas ruszania, natomiast przy obecnym występuje "palenie gumy" podczas pokonywania większych przeszkód (przód jest za mało dociążony albo tył jest zbyt ciężki).
Skręt:
Ze skrętem nie ma problemu, przednia i tylna oś są blisko siebie, obe są skrętne co pozwala uzyskać bardzo mały promień i z tego aspektu jestem bardzo zadowolony.
Zawieszenie:
Zawieszenie jest dość dziwnie zbudowane. Cały pojazd składa się z części przedniej (napęd) i tylnej (zasilanie). W samym środu łączony jest przegubem kulowym znanym z unimoga i crawlera, a stabilizację zapewniają 2 wzdłużnie umieszczone amortyzatory. Jeżeli chodzi o ruchy na nierównościach, to działa ono poprawnie. Cały smak psuje jednak wychylanie na boki i do środka. W przypadku ruchów na boki, konieczne było pozostawienie przerwy na dwa study aby przód i tył nie kolidowały ze sobą. Jeszcze gorzej wygląda ściskanie do środka, wtedy kierowca połamałby sobie żebra o kierownicę, a być może nawet odcisnął rysy twarzy na szybie.
Wygląd:
Cały pojazd został źle zaprojektowany, silnik w niewłaściwym miejscu, dziwne zawieszenie, to wszystko i jeszcze więcej miało wpływ na wygląd zewnętrzny, miejscami fajnie, miejscami ohydnie.
Podsumowanie:
Zastanawiałem się długo czy jest sens umieszczania na forum tego czegoś, wśród niemal idealnych prac sariela, walera93, piotrka839, noniusza i innych nie wymienionych (jeżeli źle odmieniłem to przepraszam). Uznałem jednak że warto, licząc na słowa krytyki - idealnym pracom nie można wiele zarzucić, a tutaj będzie dużo miejsca na porady. Tak naprawdę jedynymi cechami jakie podobają mi się w tym modelu jest fakt zdalnego sterowania i mały promień skrętu. Myślę że te dwie cechy będę chciał wykorzystywać w moich kolejnych mocach, a pozostałe ulegną znaczącej poprawie. Ale o tym przy kolejnej prezentacji...
EDIT.
W końcu udało mi się film zrobić...
[youtube]http://www.youtube.com/watch?v=wBAvyBZrFvg[/youtube]