
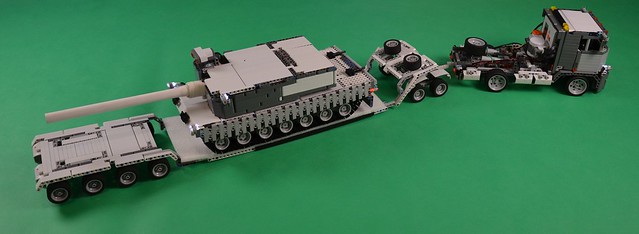
W skład zespołu wchodzą: ciągnik dwuosiowy z naczepą oraz czołg ciężki.
Do budowy pojazdów i pilotów wykorzystano:
- 6 kontrolerów NXT
- 11 serwomotorów
- 4 czujniki dotyku
- 2 czujniki koloru
- 1 czujnik ultradźwiękowy
- 1 akcelerometr
- 4 układy ekspanderów PCF8574
- 24 LED
CIĄGNIK

Wymiary:
- długość 48s (z naczepą 160s)
- szerokość 19s
- wysokość 21s
Waga: 1,4 kg
Zawieszenie: brak
Napęd: serwomotor napędzający tylną oś poprzez przekładnie i przez mechanizm różnicowy.
Kierowanie: serwomotor przez listwę zębatą.
Opcje: Zamontowany jest trzeci serwomotor, ponieważ model ten służy również za wywrotkę oraz trzyosiową lawetę.
Sterowanie: zdane z pilota z kostki NXT i 4 czujników dotyku i klawiszy kontrolera oraz autonomiczne z kostki NXT wspomagane dwoma czujnikami koloru oraz czujnikiem ultradźwiękowym.
Sterowanie światłami (światła przednie, tylnie, kierunkowskazy, cofania i pulsujące) odbywa się na bazie protokołu I2C poprzez dwa ekspandery podłączone do jednego portu 12 kanałami (plus 4 w rezerwie) każdy LED odrębnym kanałem.
Sygnalizacja dźwiękowa (klakson) realizowana jest przez głośnik kontrolera po przyciśnięciu klawisza na pilocie.
Podczas cofania również odtwarzany jest przerywany sygnał dźwiękowy.
CZOŁG

Wymiary:
- długość 53s (z lufą 87s)
- szerokość 27s
- wysokość 18s (ze skanerem 24s)
Waga: 4,2 kg
Zawieszenie: niezależne każdego koła na axlach skrętnych inspirowane pomysłem Sariela z projektu Leopard 2A4 jednak nieco inaczej utwierdzane do szkieletu podwozia.
Napęd i kierowanie: dwa serwomotory sterowane niezależnie bez przekładni bezpośrednio na tylnie koła gąsienic.
Sterowanie podwozia: zdalne z pilota złożonego z dwóch kontrolerów za pomocą wychylenia manetek serwomotorów niezależnie dla każdej z gąsienic i klawiszy kontrolera do obracania wieży oraz autonomiczne z kontrolera w podwoziu sterującego serwomotorami napędowymi oraz serwomotorem obracającym wieżą wspomagany czujnikiem ultradźwiękowym.
Sterowanie wieżą: zdalnie z klawiszy drugiego kontrolera pilota oraz autonomicznie z kontrolera znajdującego się w wieży sterującego trzema serwomotorami pierwszy obracający skanerem otoczenia w postaci czujnika ultradźwiękowego, drugi unoszącego i opuszczającego lufę i trzeci obsługujący spust działa wystrzeliwującego kulkę wspomaganego przez akcelerometr Hi-Tech odpowiedzialny za stałe położenie lufy na cel podczas jazdy po przeszkodach.
Oświetlenie obsługują podobnie jak przy ciągniku przez protokół I2C dwa ekspandery. Jednak tym razem, podłączone każdy do własnego kontrolera.
Synchronizacja funkcji podwozia i wieży odbywa się za pomocą połączenia Bluetooth między kontrolerami. Oznacza to, że podwozie i wieżę nie łączą żadne przewody, co umożliwia nieskończoną (ograniczoną pojemnością akumulatorów) ilość obrotów wieży.
Niekoszerność: Na pewno każdy zauważył (trudno nie zauważyć ;) ) lufę z rurki PCV (mam za słabą wyobraźnię, aby wykonać lufę z LEGO umożliwiającą wystrzeliwanie kulek), na pewno została również zauwazona pianka na powierzchni naczepy (użycie jej jest motywowane skończeniem się liftarmów do wykonania powierzchni, z której zjeżdża czołg), ale niewidoczna jest trzecia niekoszerność w postaci 500g balastu wyrównującego poziomowanie wieży z taśmy ołowianej uformowanej w kształt mieszczący się w przedniej części wieży.
Oprogramowanie pojazdów i pilotów na bazie NXT-G (ciągle nie mam czasu, aby przesiąść się na RobotC, chociaż jest to nieuniknione, ponieważ wersja 3.04 jest już zainstalowana )
Galeria
Film
[youtube]http://www.youtube.com/watch?v=Wkqg7D0Bpj0[/youtube]
Thanks: Specjalne podziękowania dla Barta za pożyczenie płytek na jedną z gąsienic czołgu.
Info: Militarny Zespół Robotów Mobilnych zajął II miejsce w kategorii Motorola Solutions Freestyle na Festiwalu Robotyki ROBOCOMP organizowanym przez Koło Naukowe Integra przy AGH

