Dane techniczne
12 silników PF M, z czego:
- 6 na palce
- 2 na nadgarstek
- 4 na łokieć
4 wieże IR
1 pakiet baterii
1 przełącznik
4 siłowniki śrubowe
8 mini siłowników
waga – 1,6 kg
długość przedramienia z dłonią – 53,5 cm
długość ramienia – 33 cm
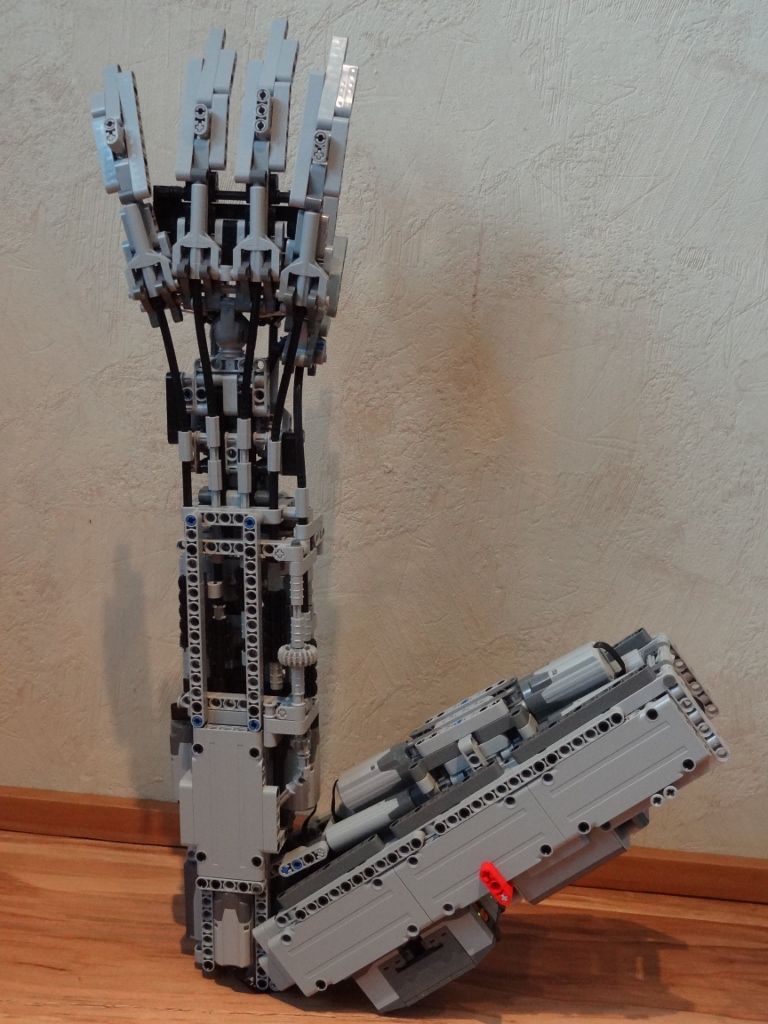
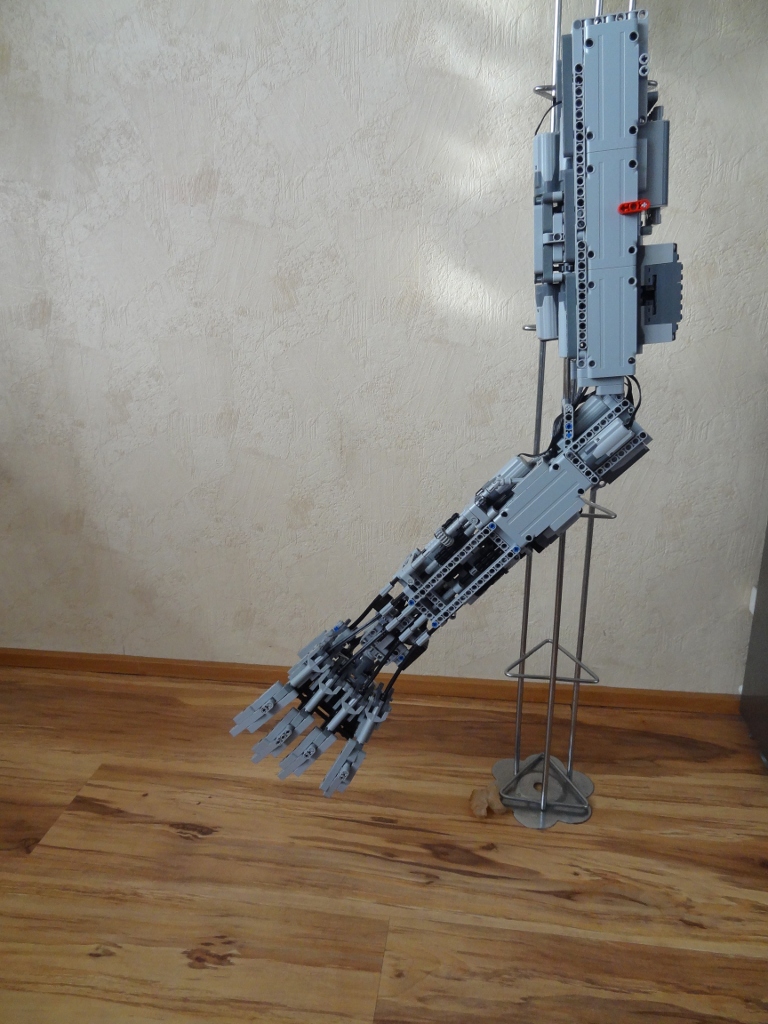
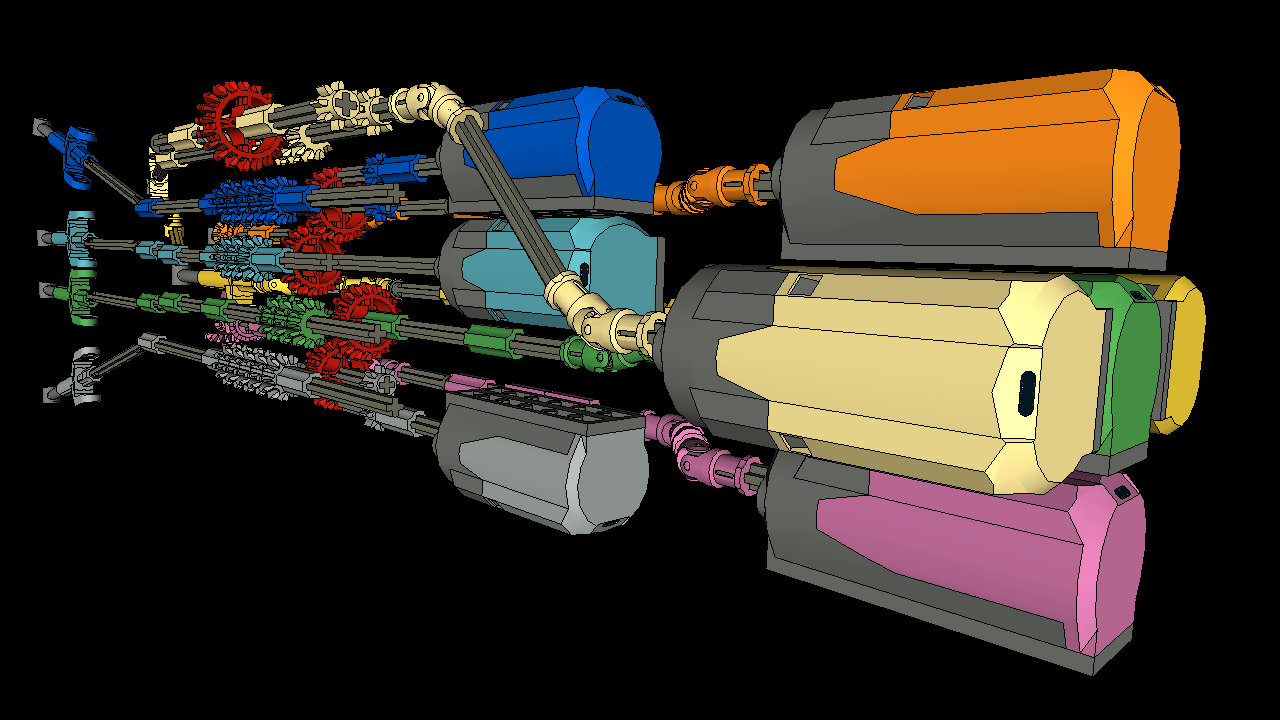
Ramię
Opis zacznę od łokcia i ramienia który w zasadzie jest dodatkiem do całości i stanowi podporę dla przedramienia oraz miejsce dla wież IR i baterii. Sterowanie podnoszeniem przedramienia odbywa się ręcznie poprzez przełącznik (zabrakło kanałów na pilocie). Jako że jest to dodatek wolałem wszystkie 8 kanałów przeznaczyć na dłoń.
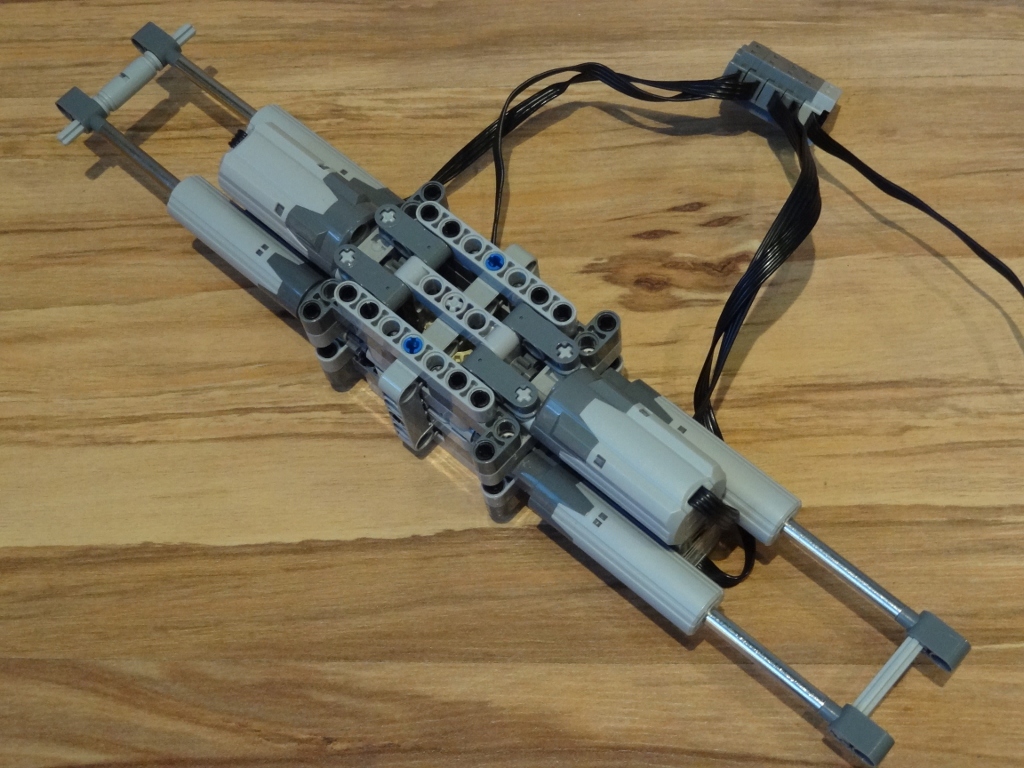
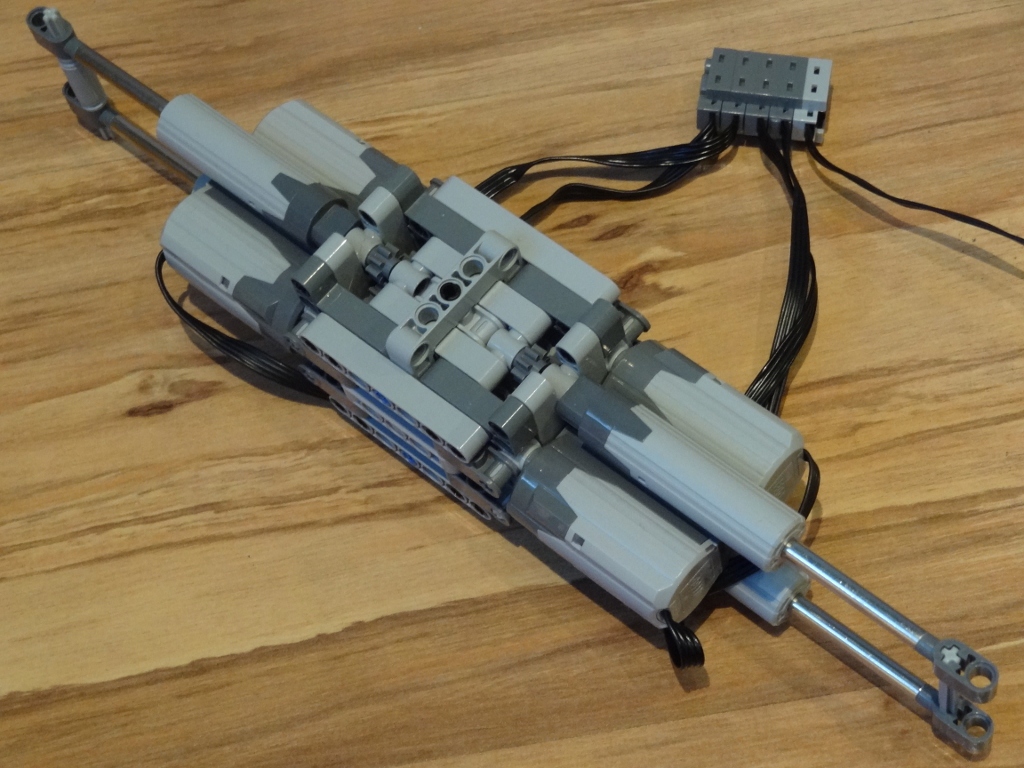
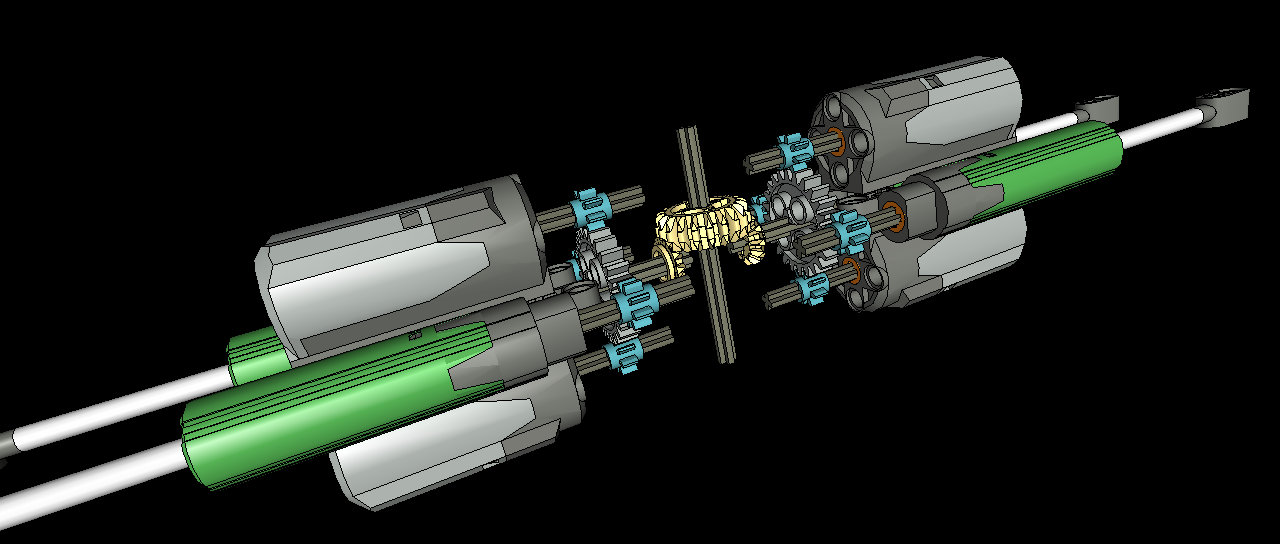
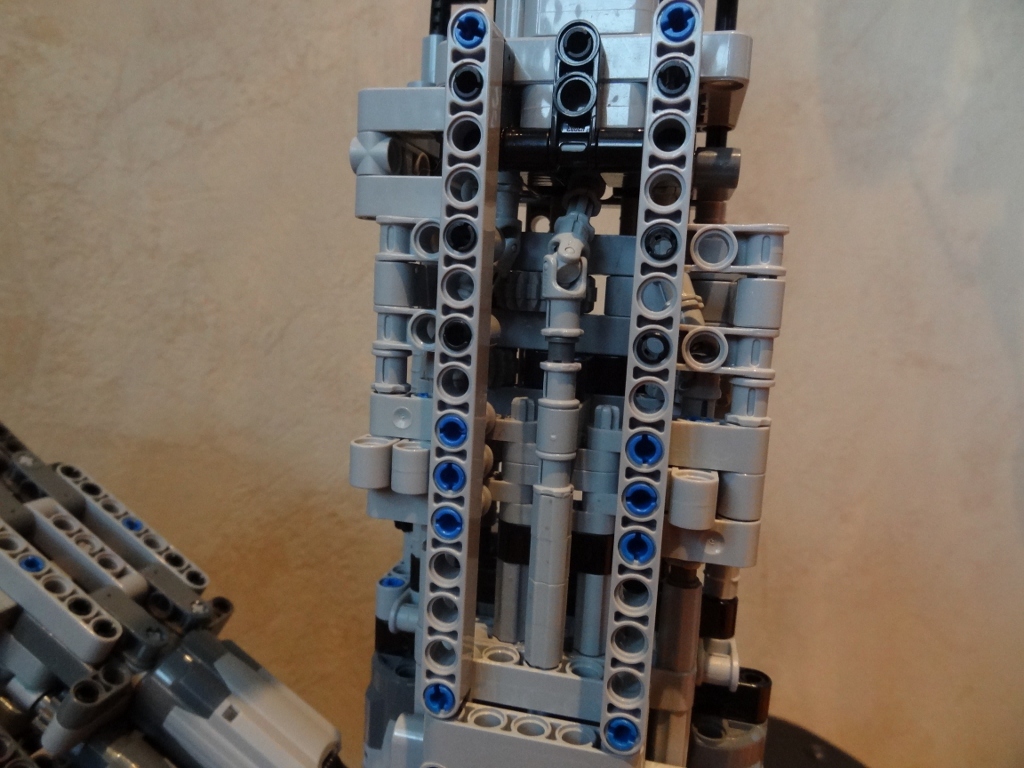
Do podnoszenia użyłem nowej wersji dużego siłownika. W jego skład wchodzą 4 siłowniki śrubowe i 4 silniki M. W porównaniu do poprzedniej wersji jest smukły i regularny. W przekroju ma 7x7 otworów, jest krótszy o 4 otwory a zakres pracy pozostał bez zmian i wynosi 10 otworów.
Konstrukcja jego jest sztywna i dość trudna do złożenia z powodu przeplotu dwóch ramek i mechanizmu w środku służącego synchronizacji siłowników.


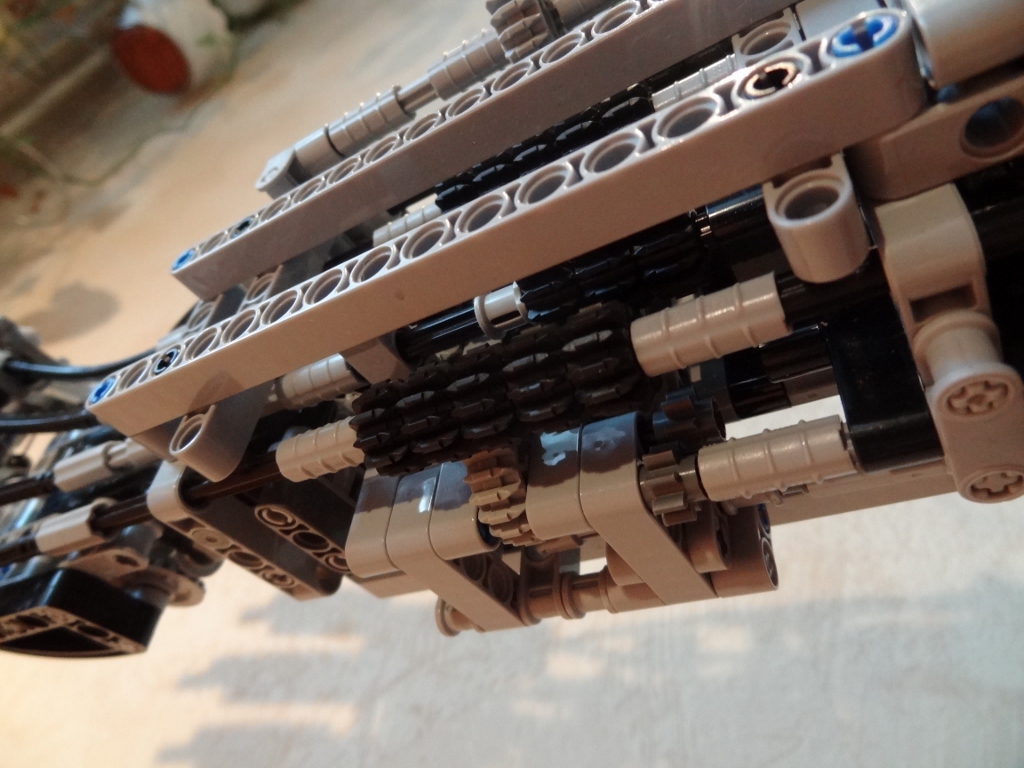
Konstrukcja ramienia oparta jest głównie o ramki dla uzyskania największej sztywności najmniejszym kosztem. Dzięki temu siłownik częściowo pracuje w ramieniu. Z tyłu znajduje się bateria i 4 wieże IR oraz wszystkie kable których jest dość dużo.


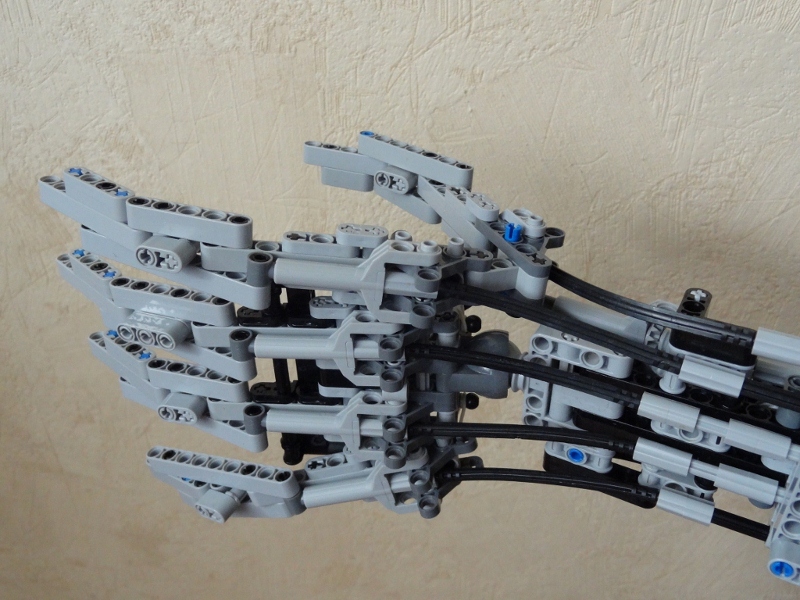
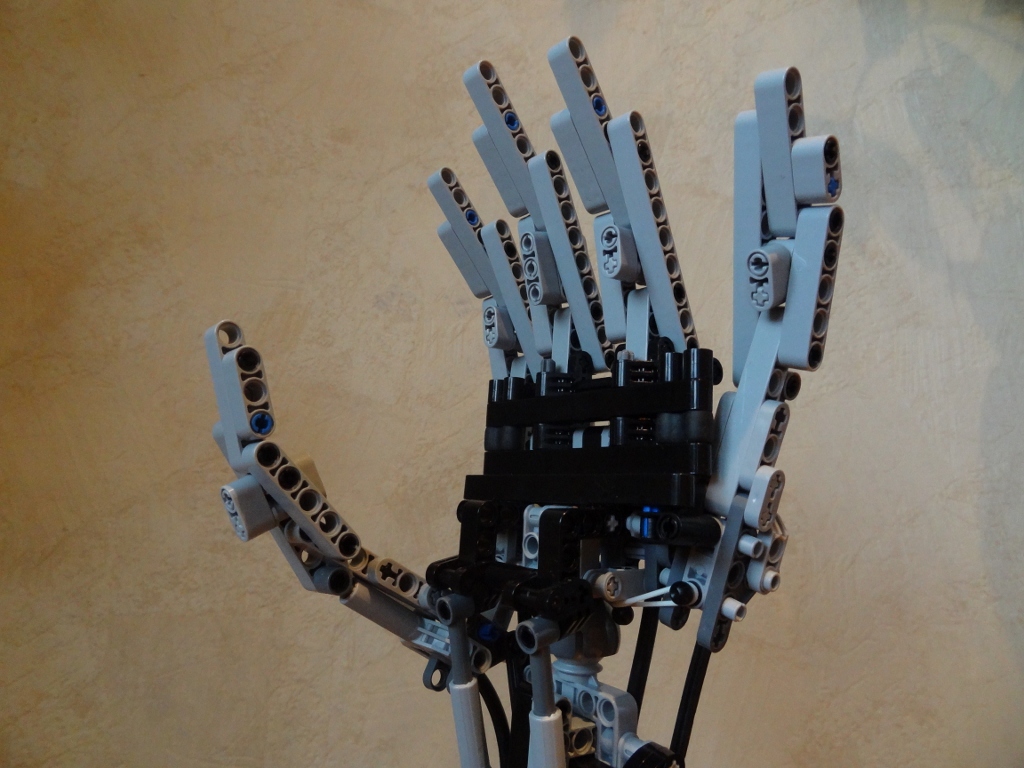
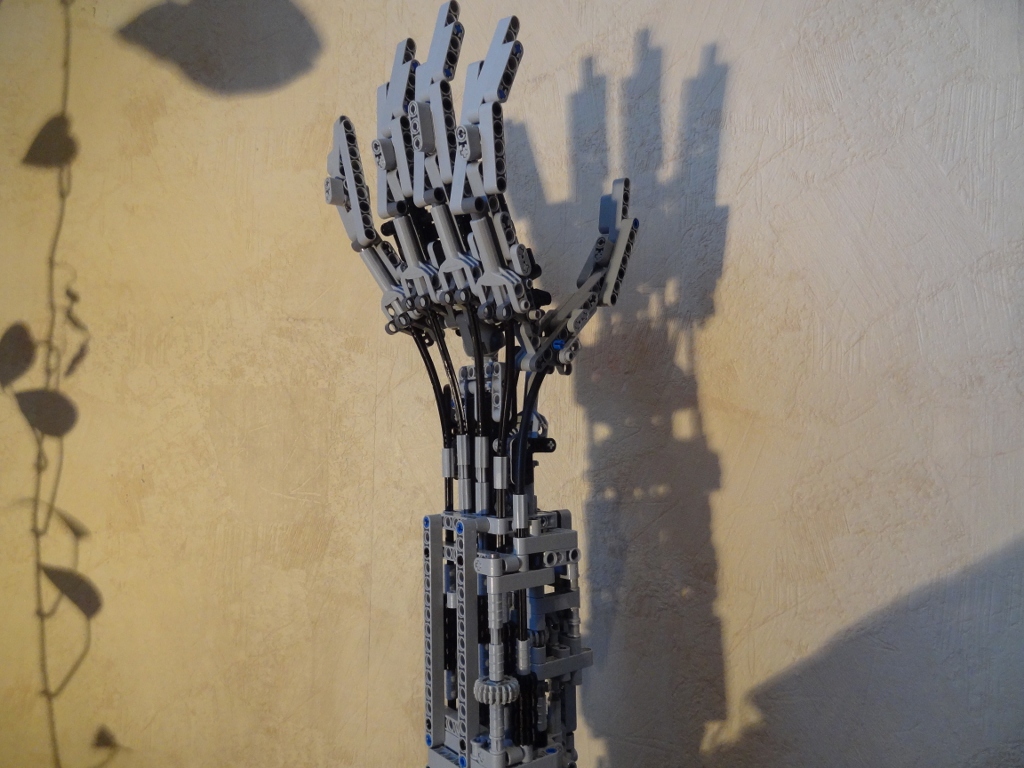
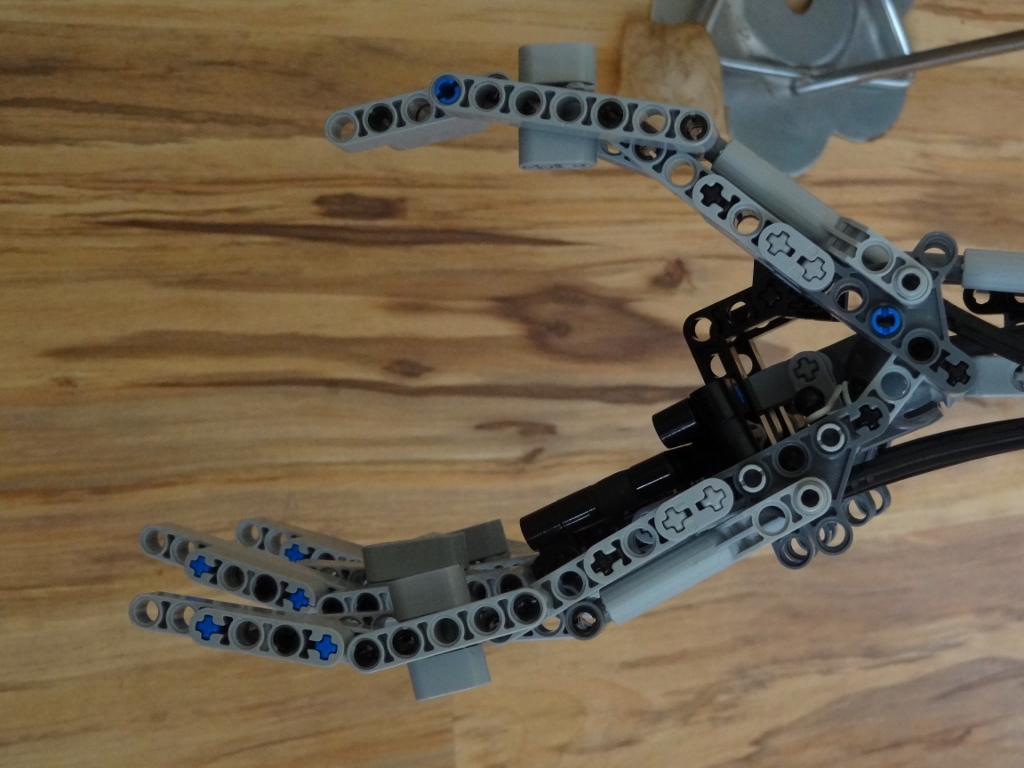
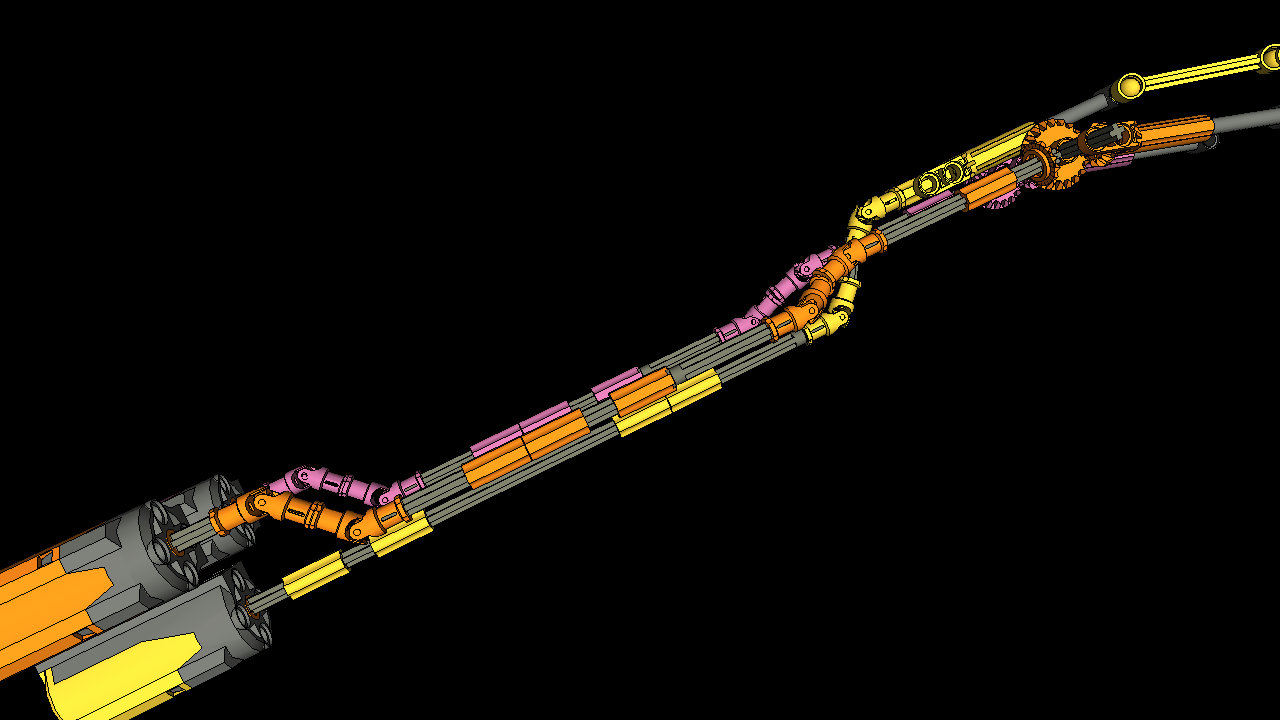
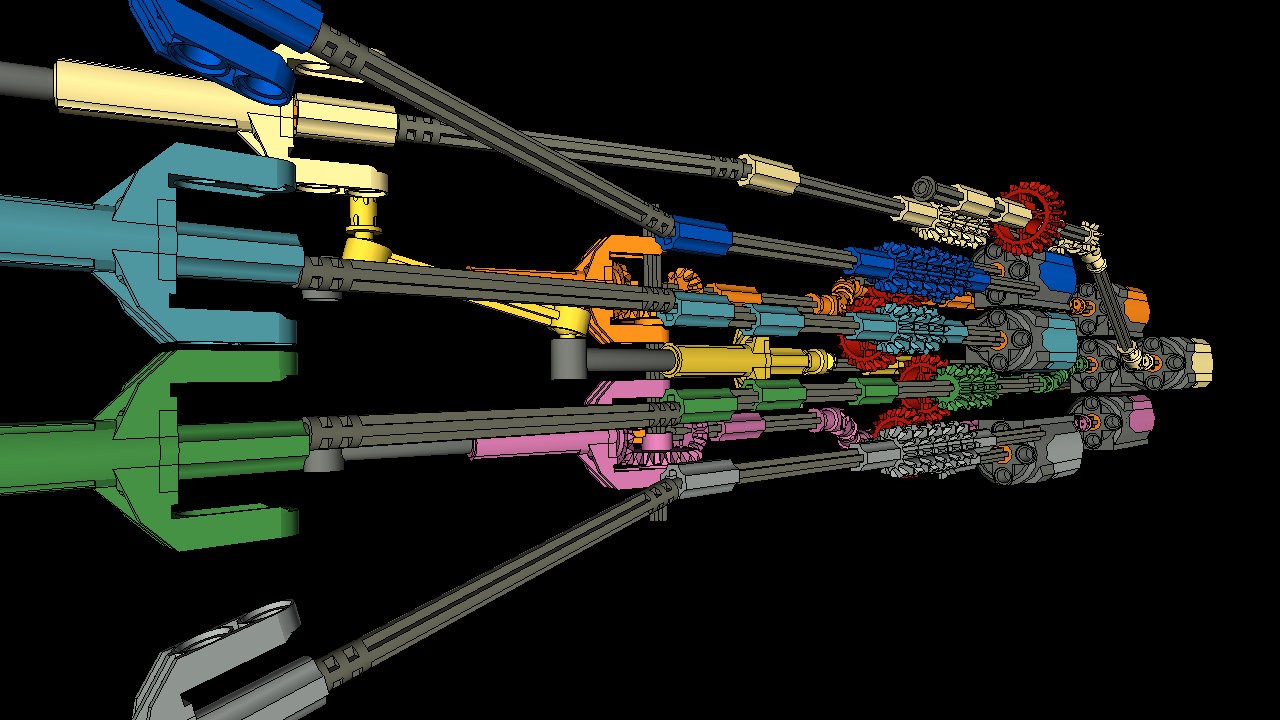
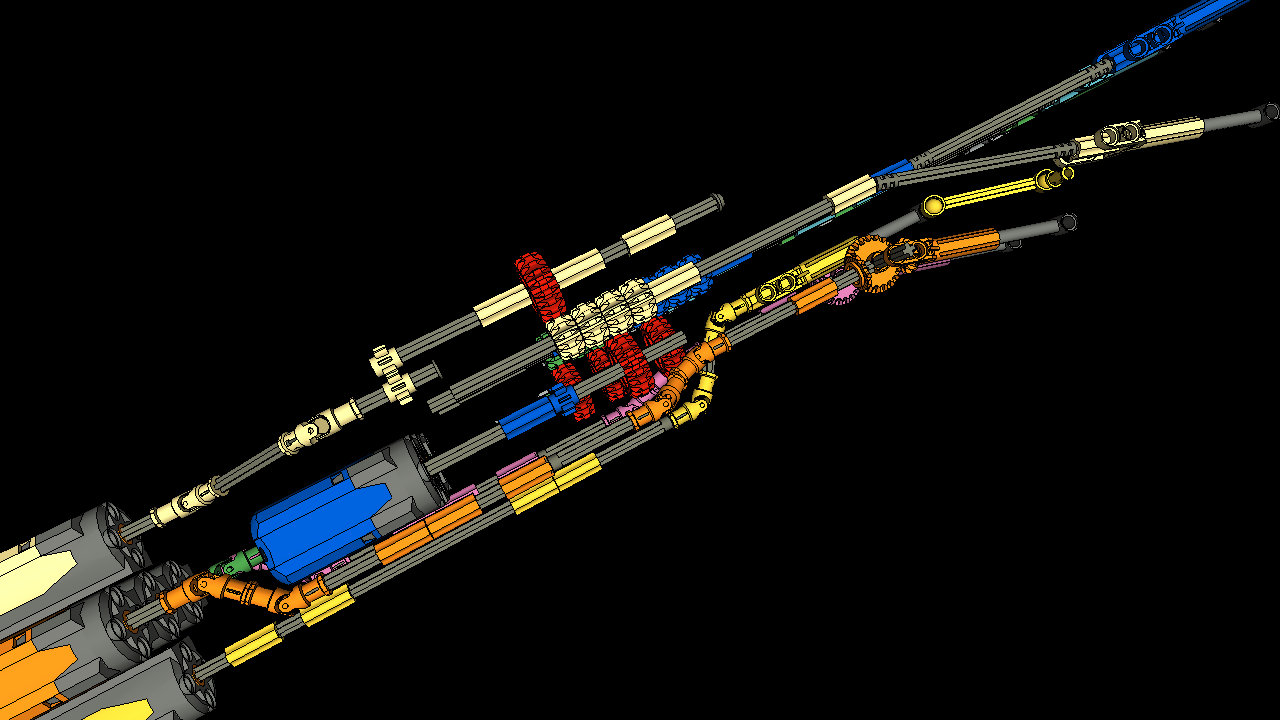
Palce
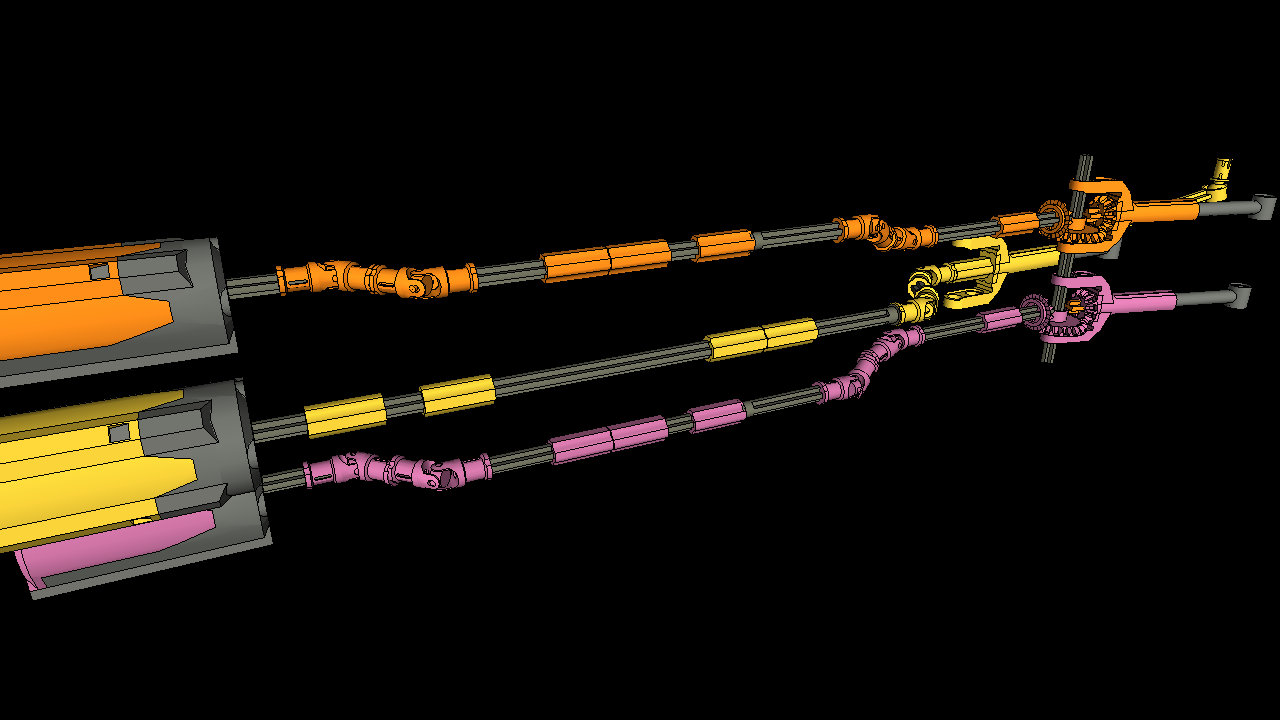
Każdy z palców jest inny tak by różnicować długość. Palce wskazujący i mały dodatkowo są rozchylone ale nie na sztywno dzięki legowym gumkom. Palce środkowy i serdeczny zabudowane są na sztywno równolegle do siebie. Kciuk który jest po przeciwnej stronie oprócz funkcji zginania posiada również funkcje rozchylania. Kciuk porusza się prostopadle do palca wskazującego. Wszystkimi palcami poruszają mini siłowniki śrubowe czyli 6 sztuk (dwa dla kciuka). Napęd na siłowniki przekazywany jest poprzez gumowe ośki które dodatkowo pełnią rolę sprzęgieł oraz wizualnie jako ścięgna.
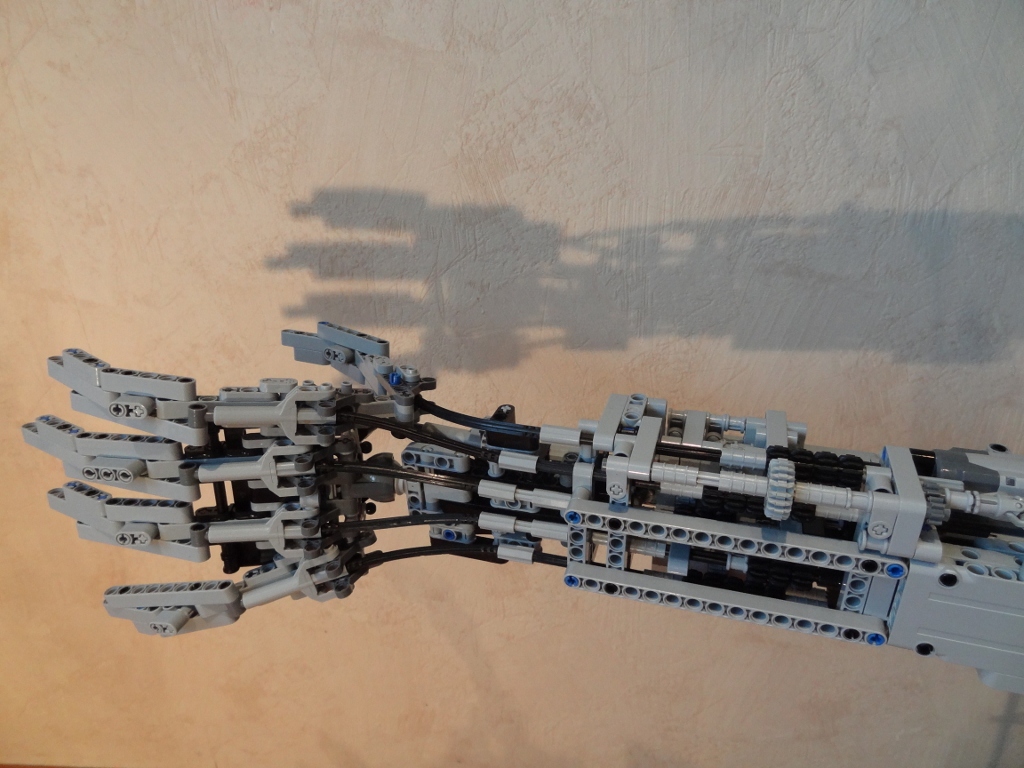
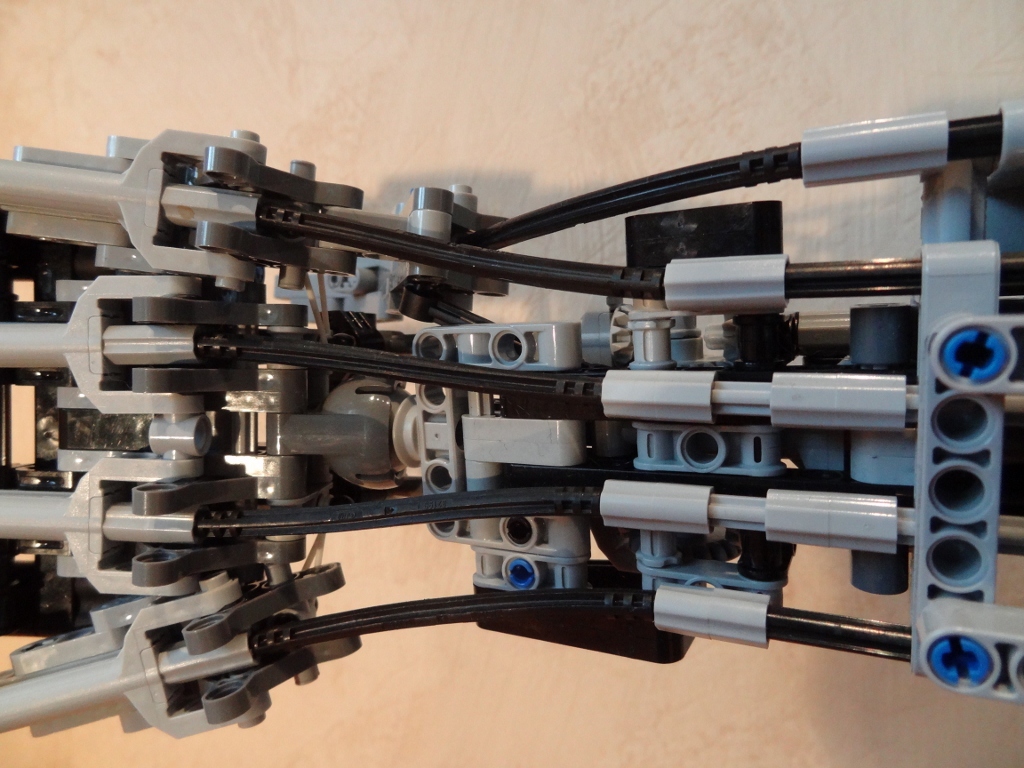
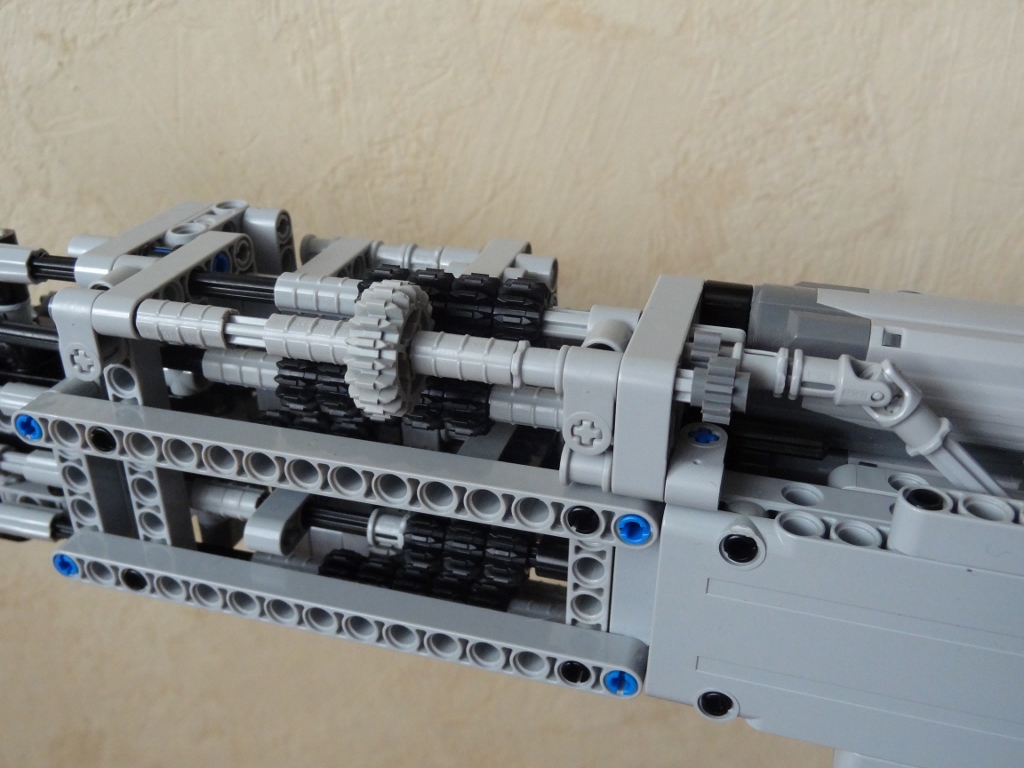
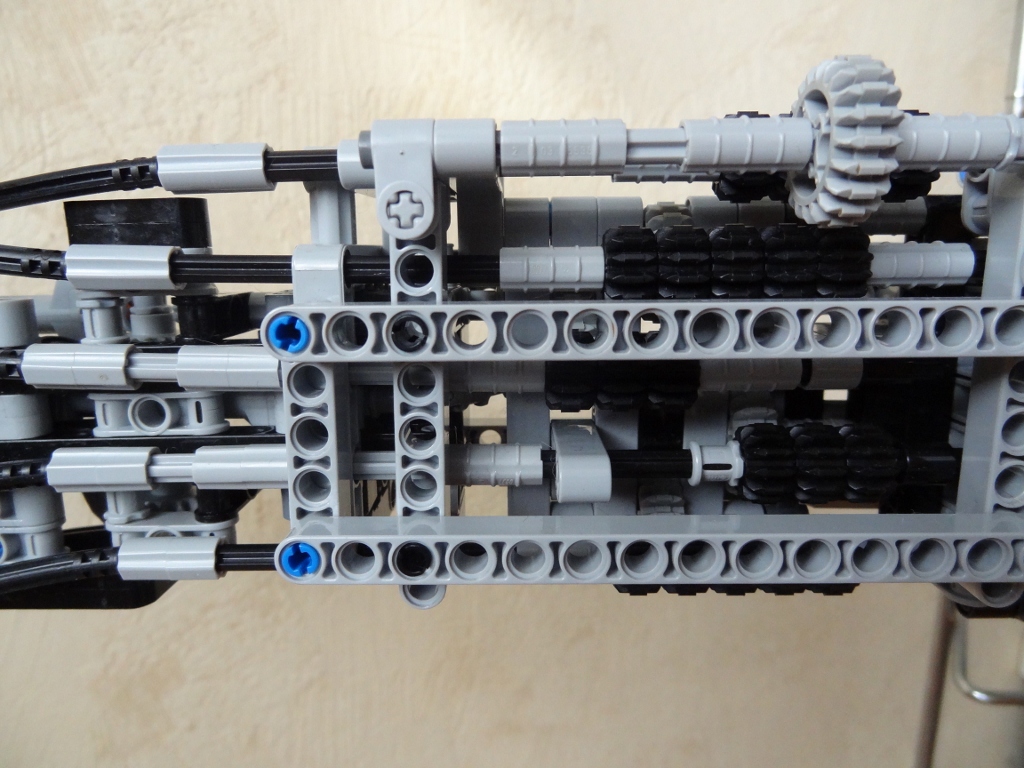
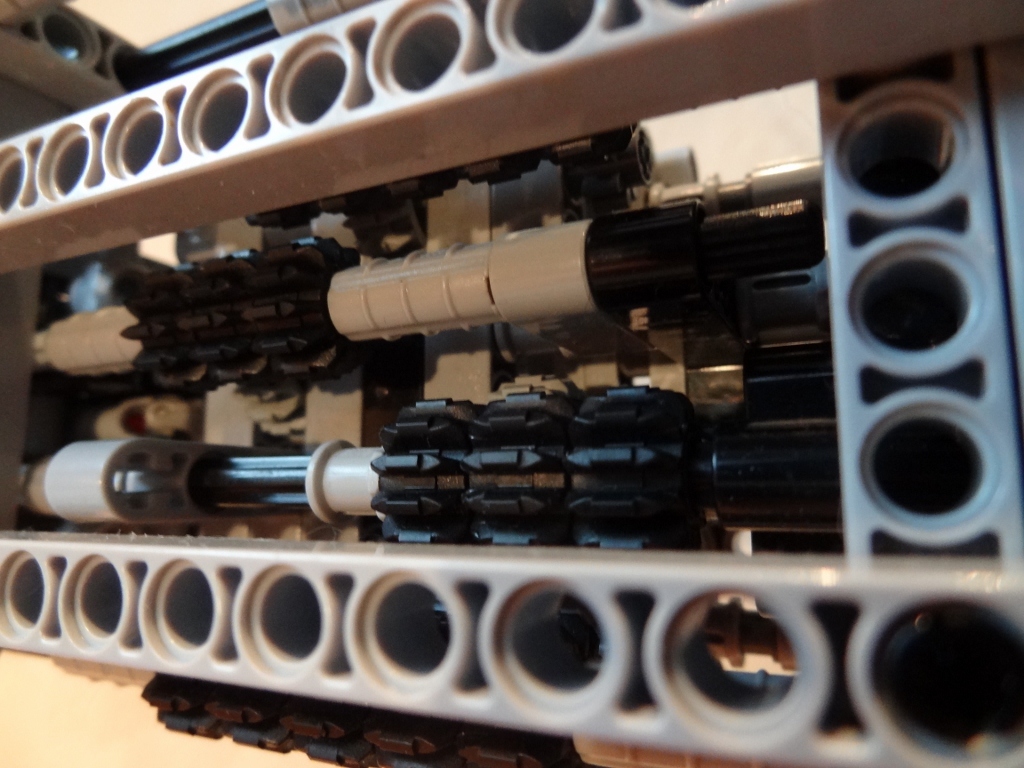
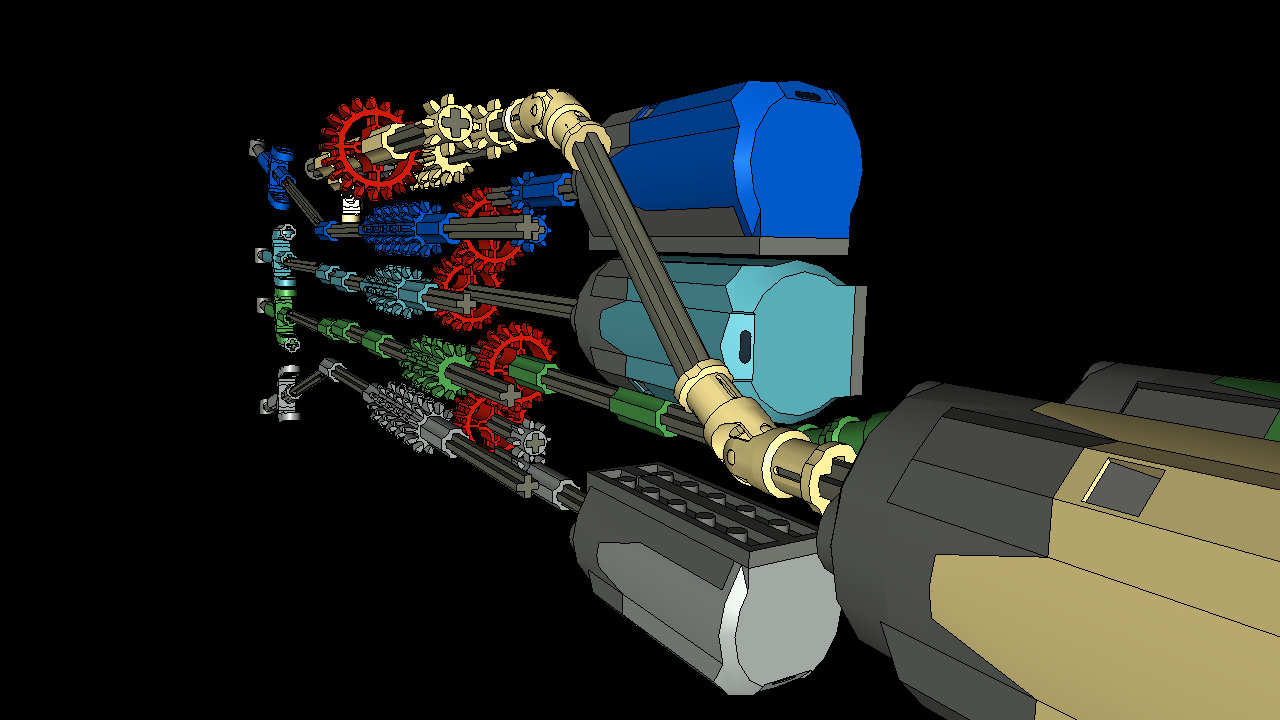
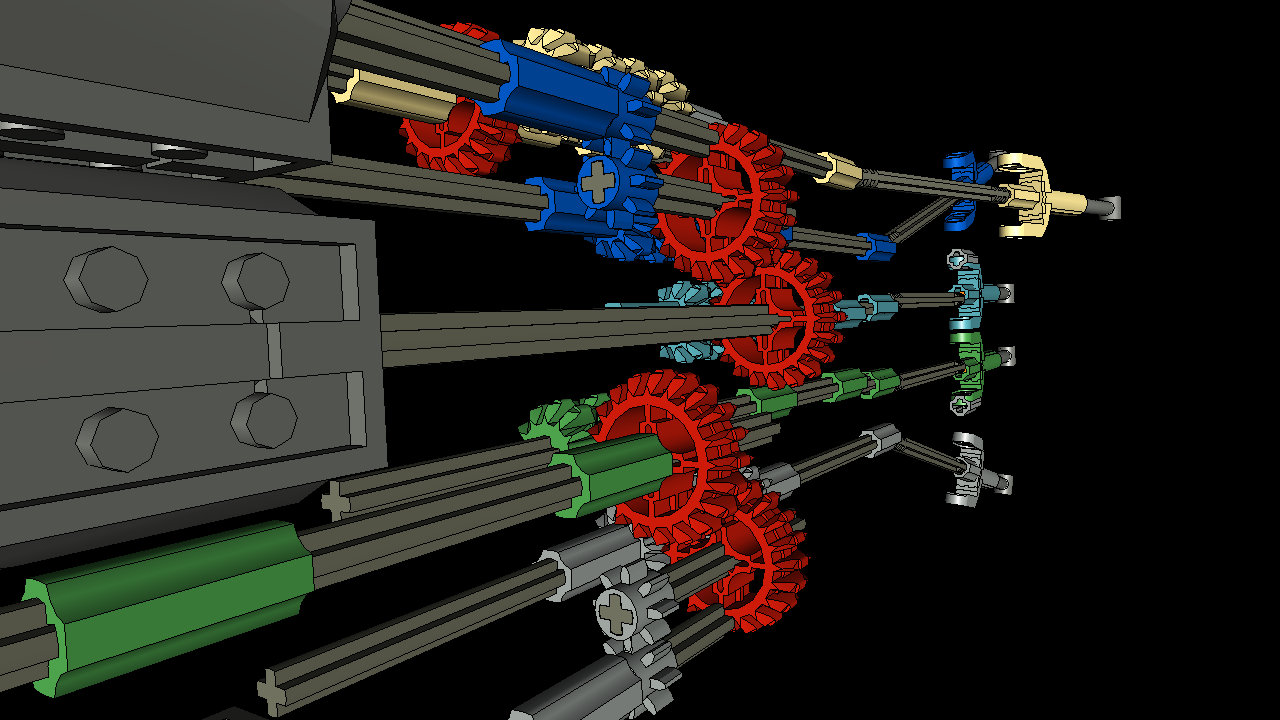
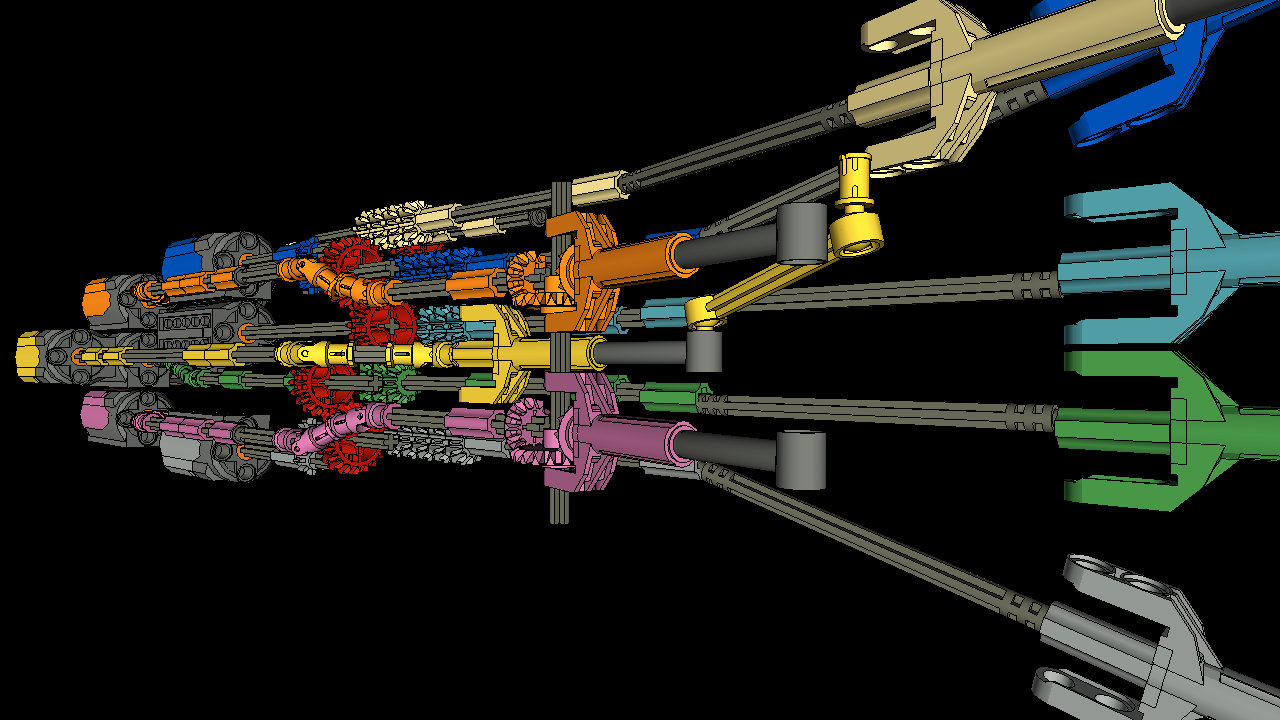
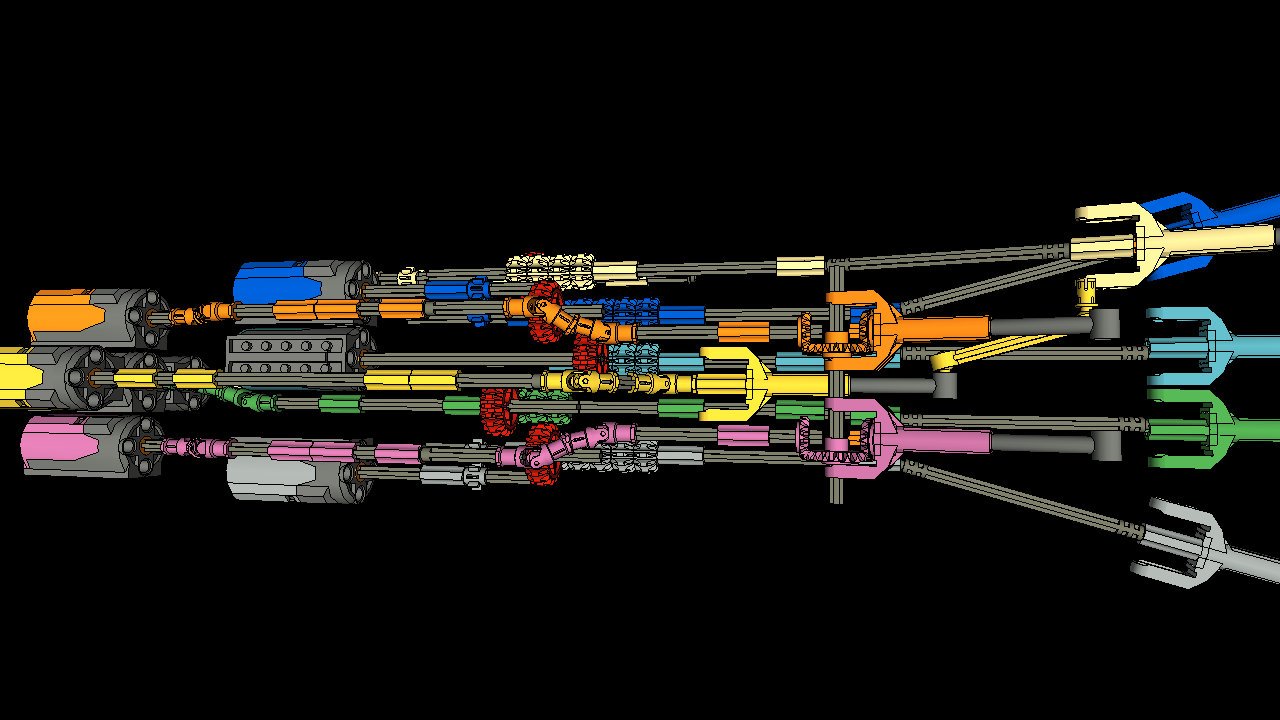
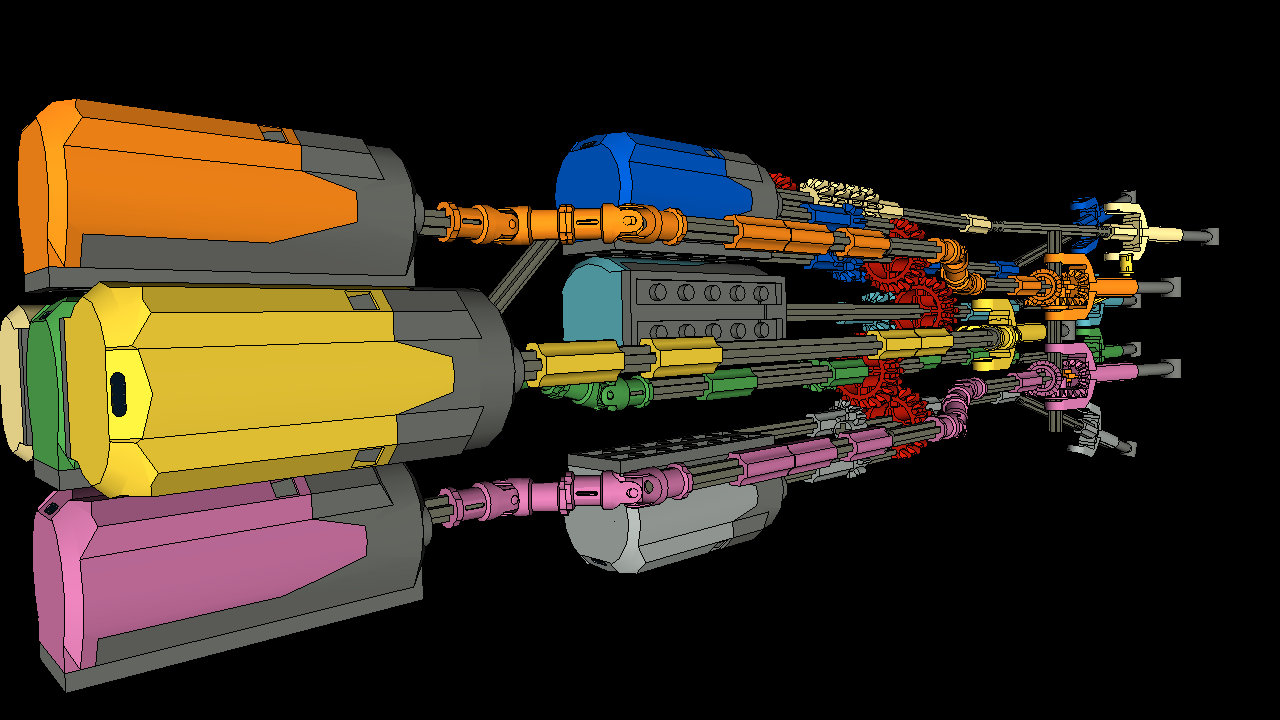
Następnym elementem przedramienia jest mechanizm główny który obsługuje 8 silników. Mechanizm ten starałem się zrobić możliwie mały. Rozdziela on 8 napędów w tym 5 specjalnych. Pisząc specjalne mam na myśli przesuwne osie z zębatkami z12. Na każdej z nich znajduje się od 3 do 5 takich zębatek (łącznie 20 sztuk). Osie te są ruchome w różnym zakresie z powodu ruchomego nadgarstka który poruszając się we wszystkich kierunkach przesuwa ścięgna napędzające mini siłowniki palców. Dla tego typu mechanizmu zębatki z12 to jedyny rodzaj który mógł być zastosowany dla jego poprawnej pracy.


Nadgarstek
Najważniejszym jego elementem jest przegub kulowy oraz zestaw 2 mini siłowników pracujących niezależnie i poruszających śródręcze. Nadgarstek porusza się we wszystkich kierunkach ale jest ograniczony przegubem kulowym więc wychylenia nie są i nie mogą być zbyt duże.

Przedramię
Przedramię poza mechanizmem głównym który znajduje się po środku posiada również 8 silników M skupionych na jego końcu. Silniki te zabudowane są możliwie ciasno mieszcząc się w gabarycie przedramienia oraz w ogólnych proporcjach.

Podsumowanie
Z projektu jestem zadowolony choć ma jedną wadę którą nie mogłem usunąć ponieważ brakuje maleńkiego klocka który jeszcze nie istnieje. Wszystkie funkcje które sobie zaplanowałem działają poprawnie. W moim poprzednim MOCu Filus zasugerował abym stosował więcej paneli i obudowy dla ukrywania mechanizmów i innych ciekawych rzeczy. Trochę tak zrobiłem ale musiałem się powstrzymać aby to co najlepsze nie zostało schowane. Dla ogólnego obrazu dodam że wielkość ręki odpowiada wysokości osoby ok. 180-190 cm wzrostu. Na koniec wspomnę że kilka lat temu również zbudowałem rękę , jednak wtedy nie miałem takich części jak teraz.
Zapraszam do galerii i na film oraz do komentowania.
Galeria
Film
Więcej MOCy na moim kanale YouTube.