
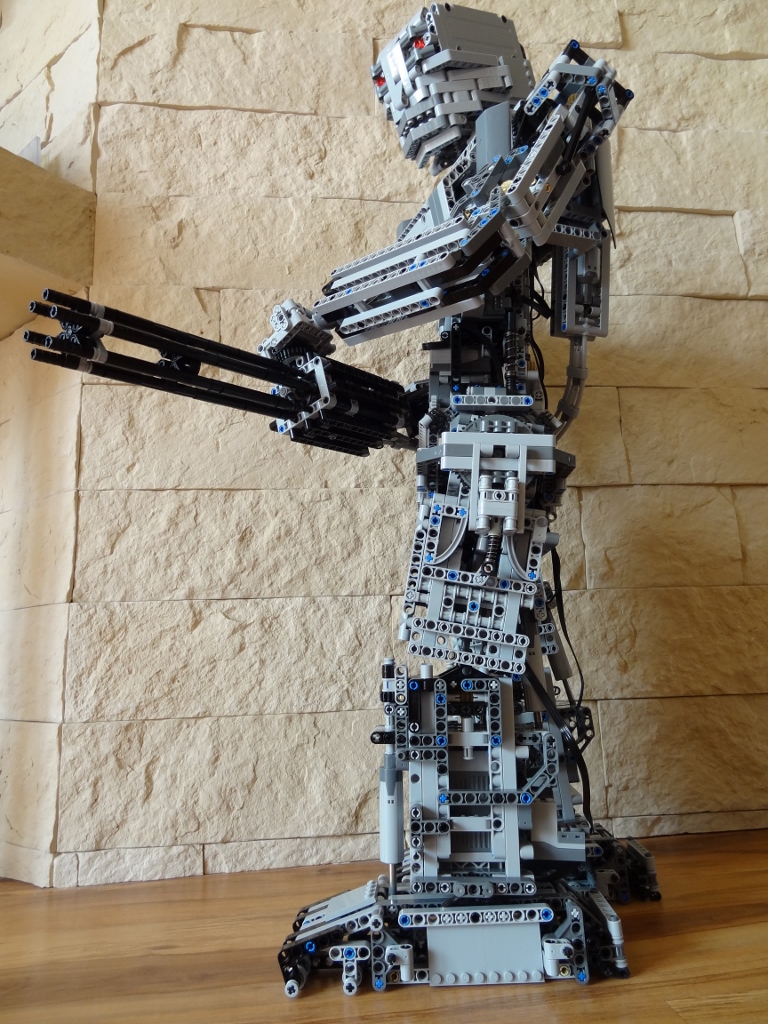
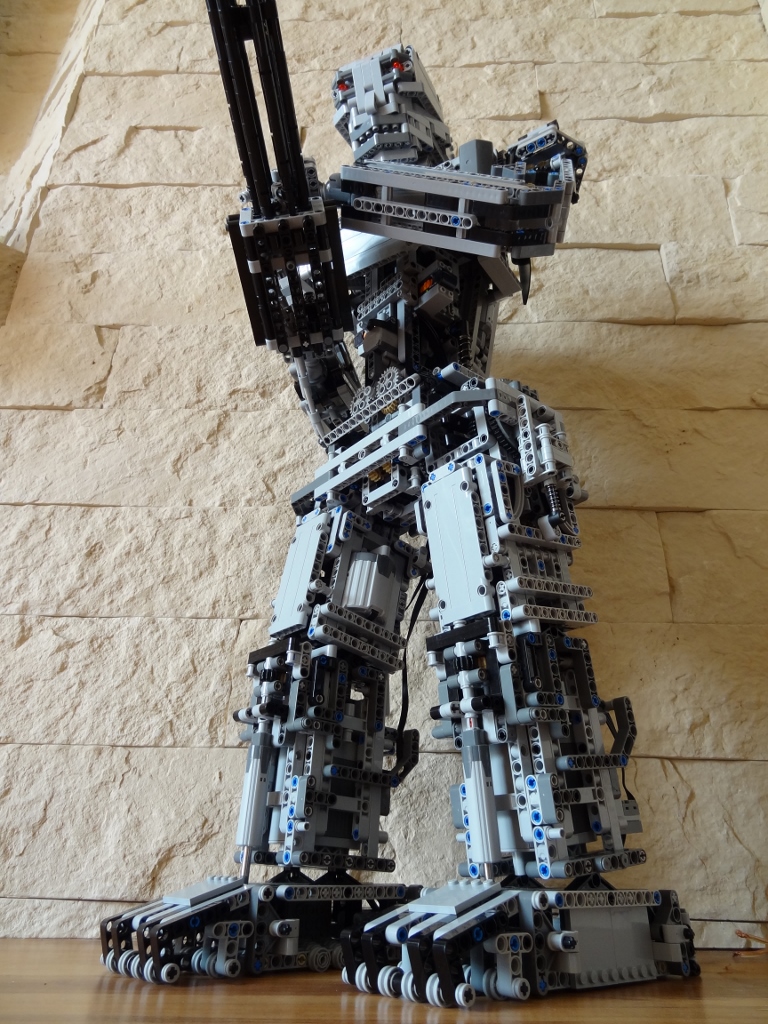
"Terminator 3" nigdy by nie powstał gdyby nie jego poprzednicy. Wnioski jakie wyciągnąłem z ich budowy zaowocowały powstaniem tego oto robota którego nazwałem "Terminator 3".

Na początek garść informacji o jego wyposażeniu:
Dane techniczne
Wysokość – 70 cm
Waga – 3,6 kg
2 silniki XL – chodzenie
1 serwo – balans tułowia
1 silnik M – obrót tułowia
2 silniki M – poruszanie głową w dwóch płaszczyznach
1 silnik M – podnoszenie przedramienia lewego
1 silnik L – napęd broni
4 wieże IR
2 pakiety baterii
2 przełączniki
1 światła
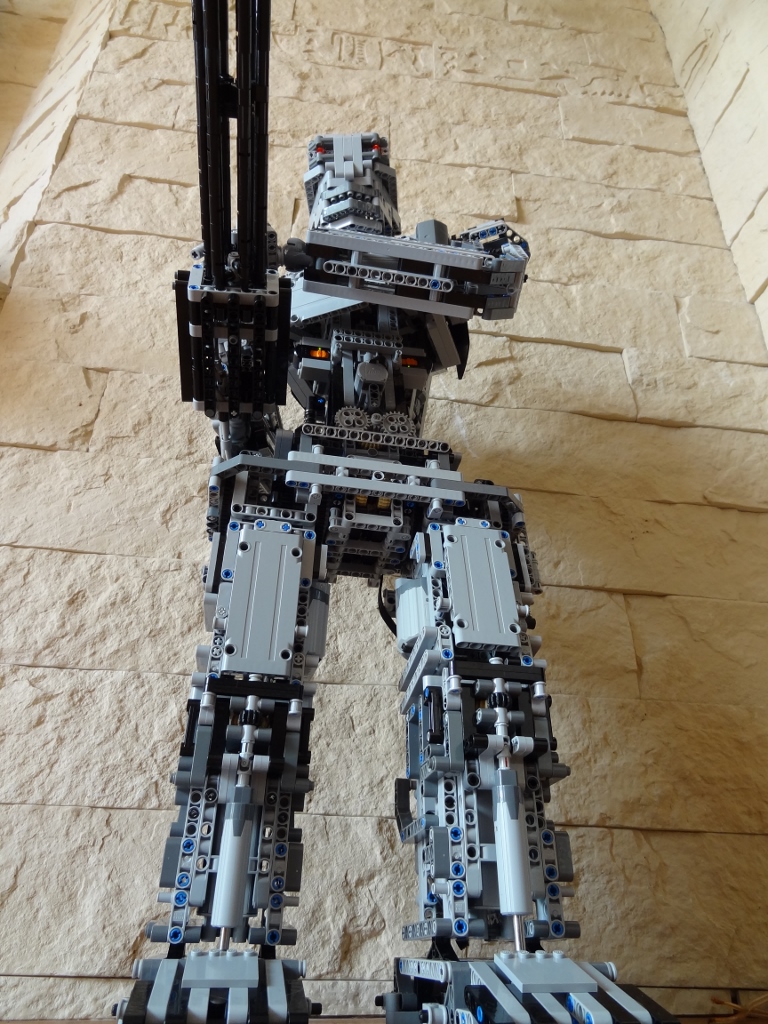
Chodzenie
Po niepowodzeniu w "Terminatorze 2" funkcji chodzenia cały swój wysiłek skierowałem na tą właśnie czynność. Po wyciągnięciu wniosków z poprzednika wiedziałem że niezbędne będą:
- bardzo duża moc
- synchronizacja mechaniczna i elektryczna obu nóg
- unikanie wszelkich luzów (jak to tylko możliwe)
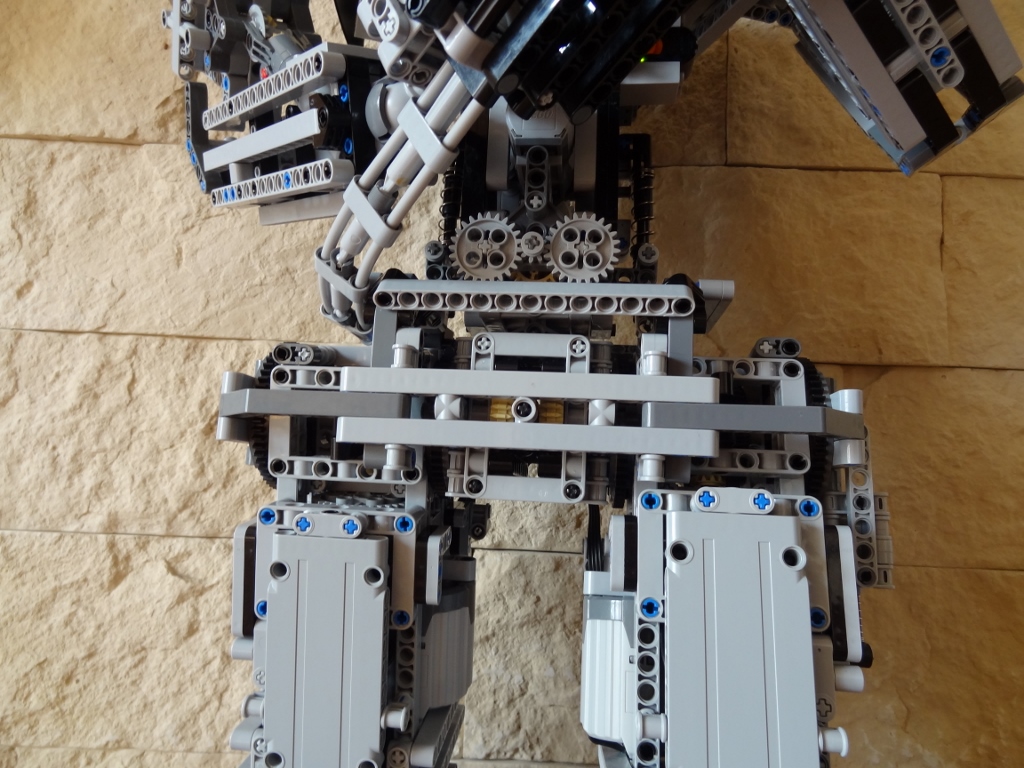
- najcięższe elementy zabudowane jak najniżej i jak najbliżej osi pionowej (kręgosłupa). Patrząc od dołu: 2 baterie, 2 XL, serwo i eMki
- krótki krok w trybie automatu
- "pancerna konstrukcja", czyli ramki tak dużo jak to możliwe.
Wszystkie te elementy znalazły swoje odzwierciedlenie w systemie chodzenia.
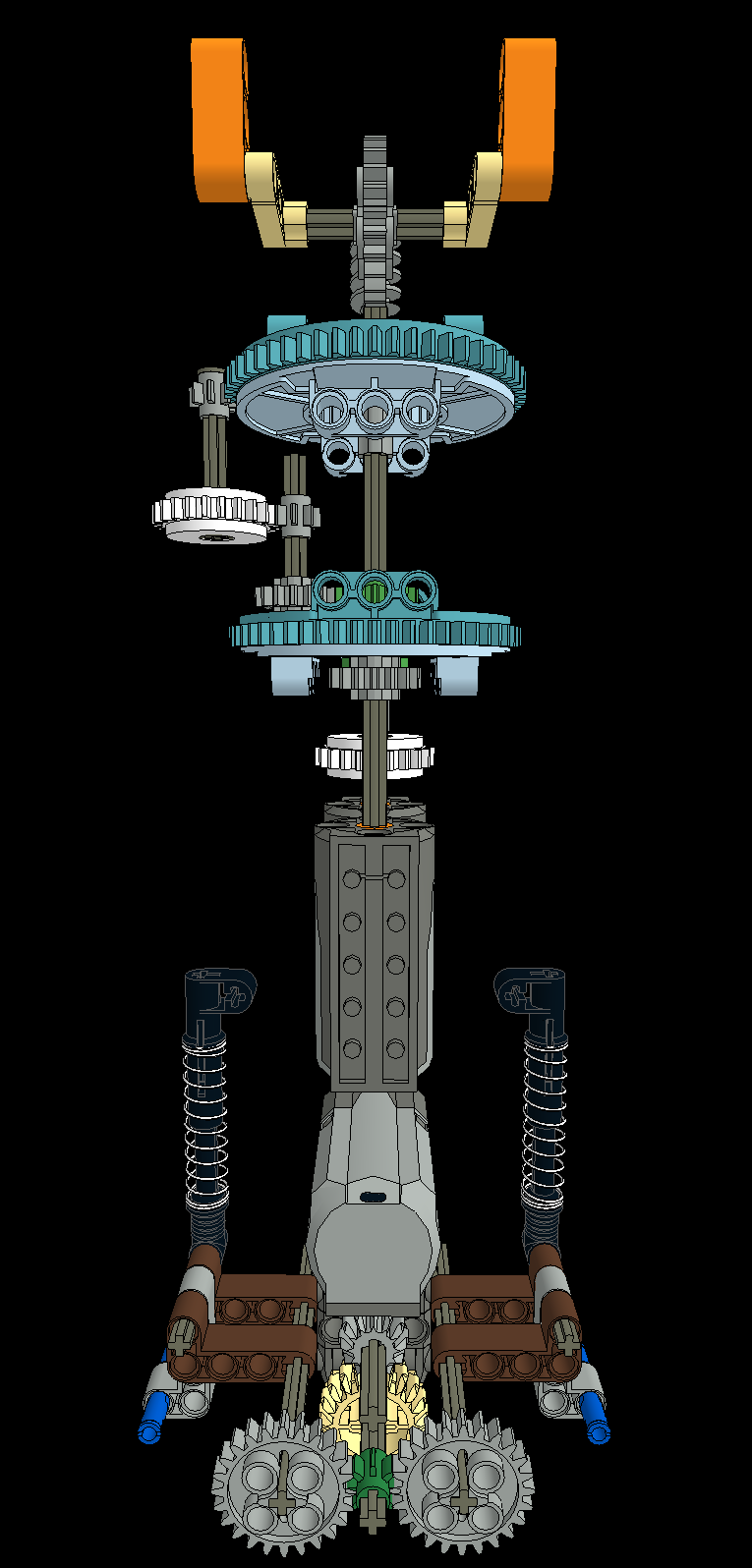
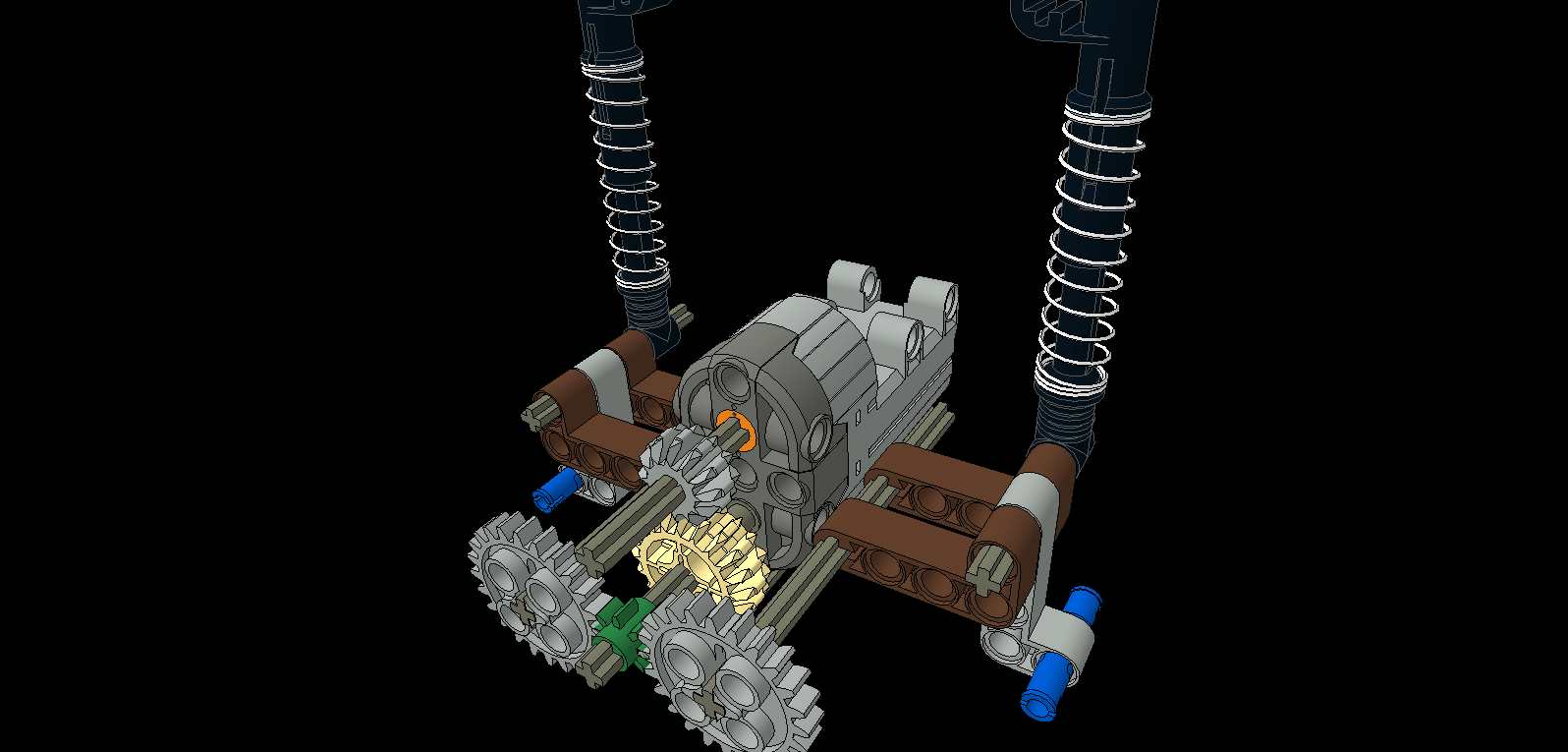
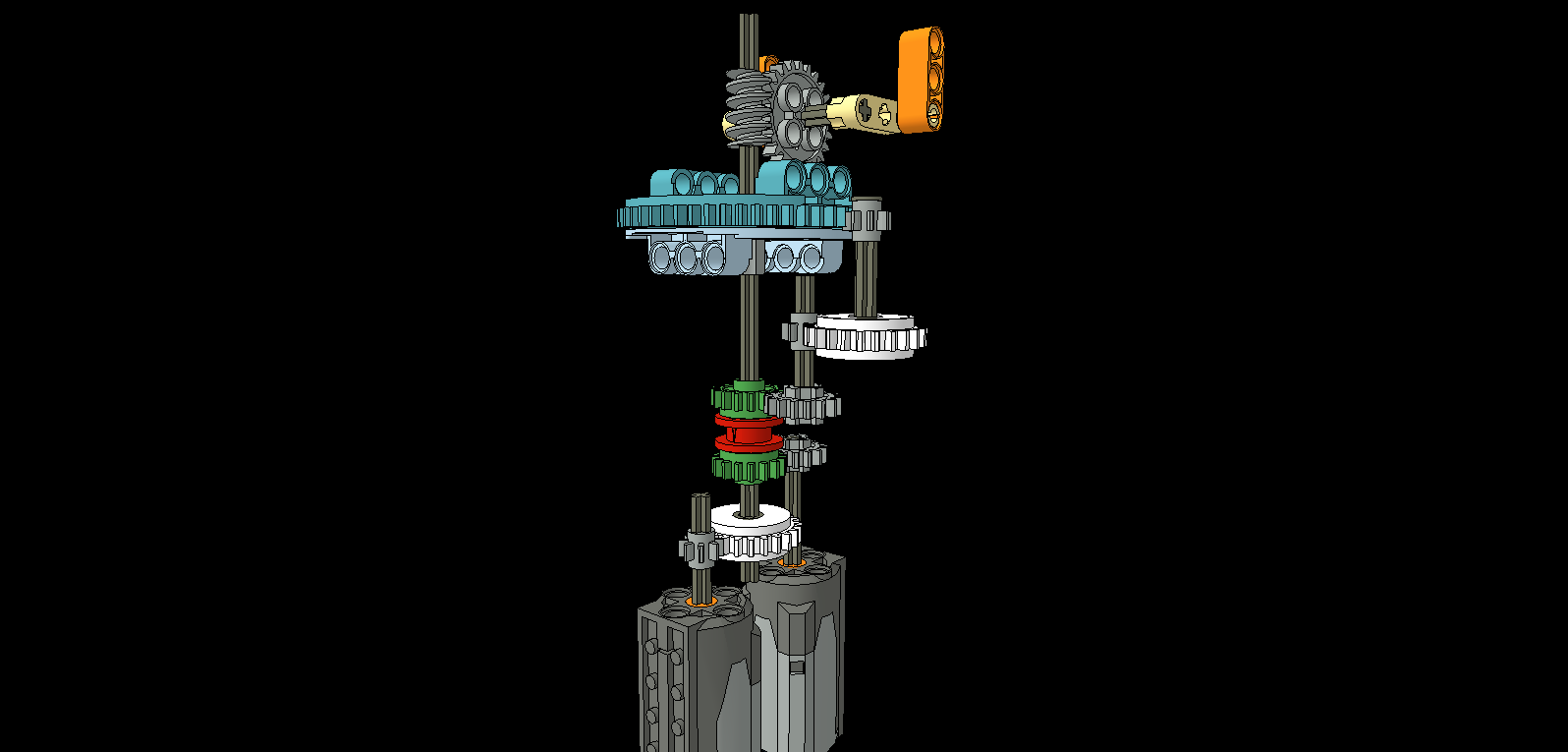
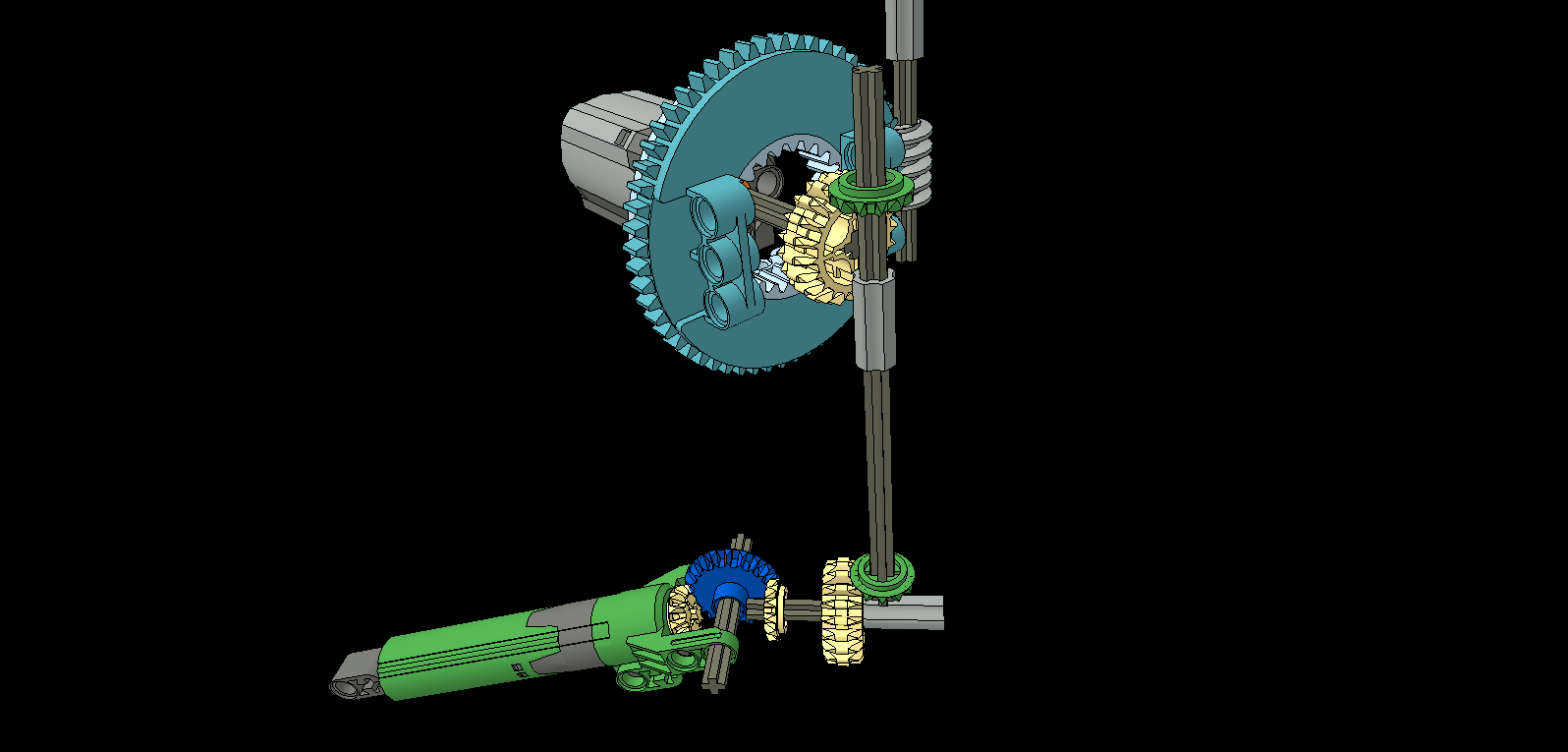
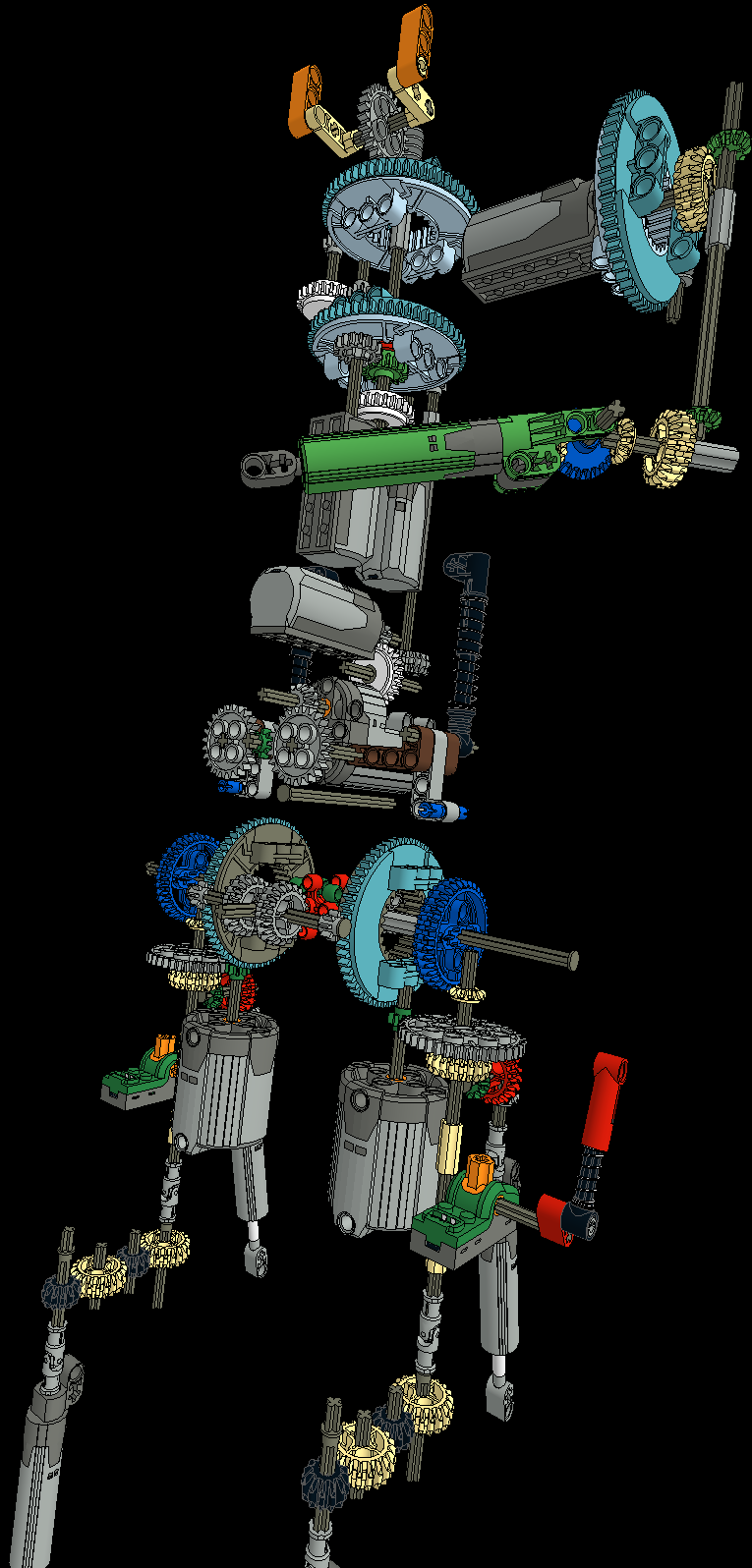
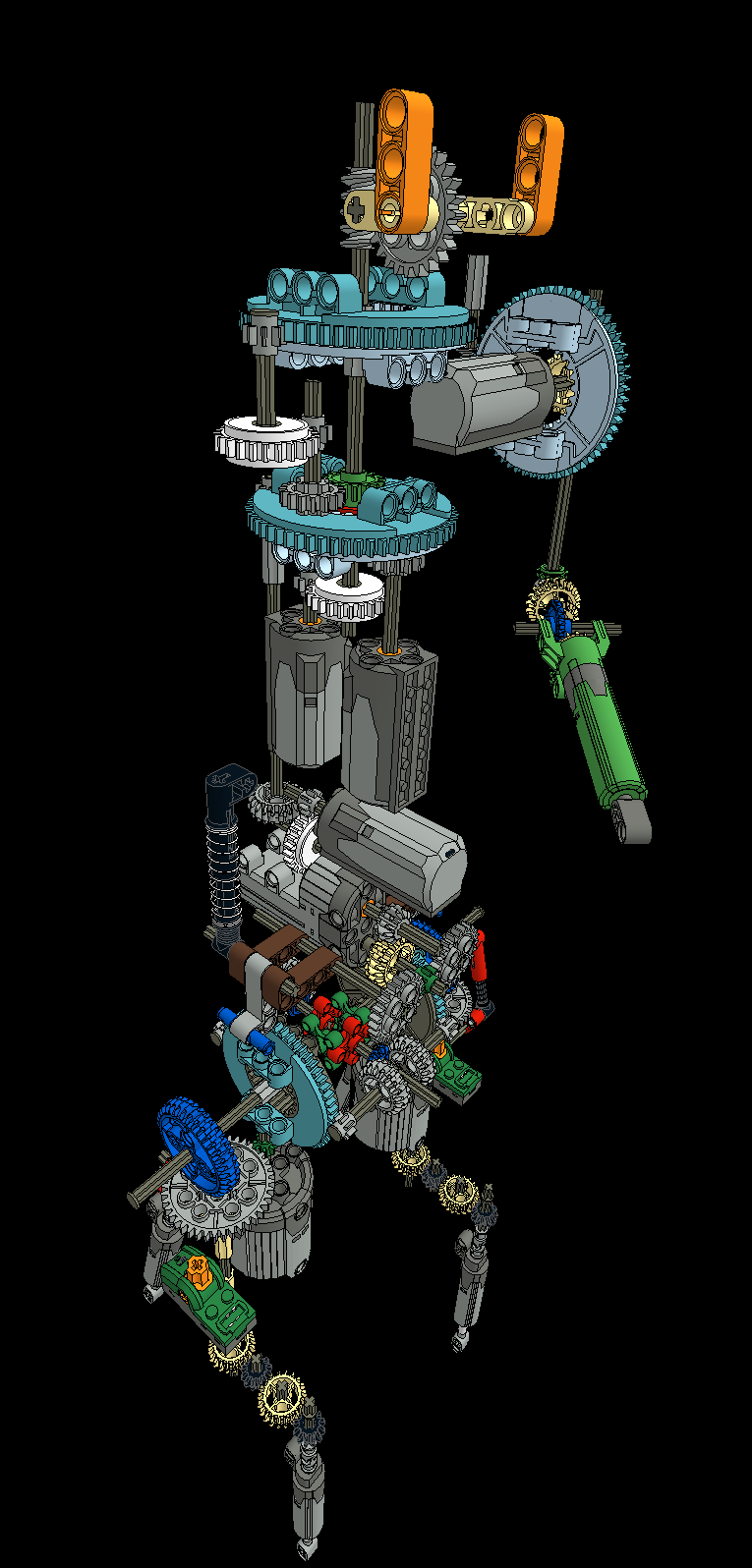
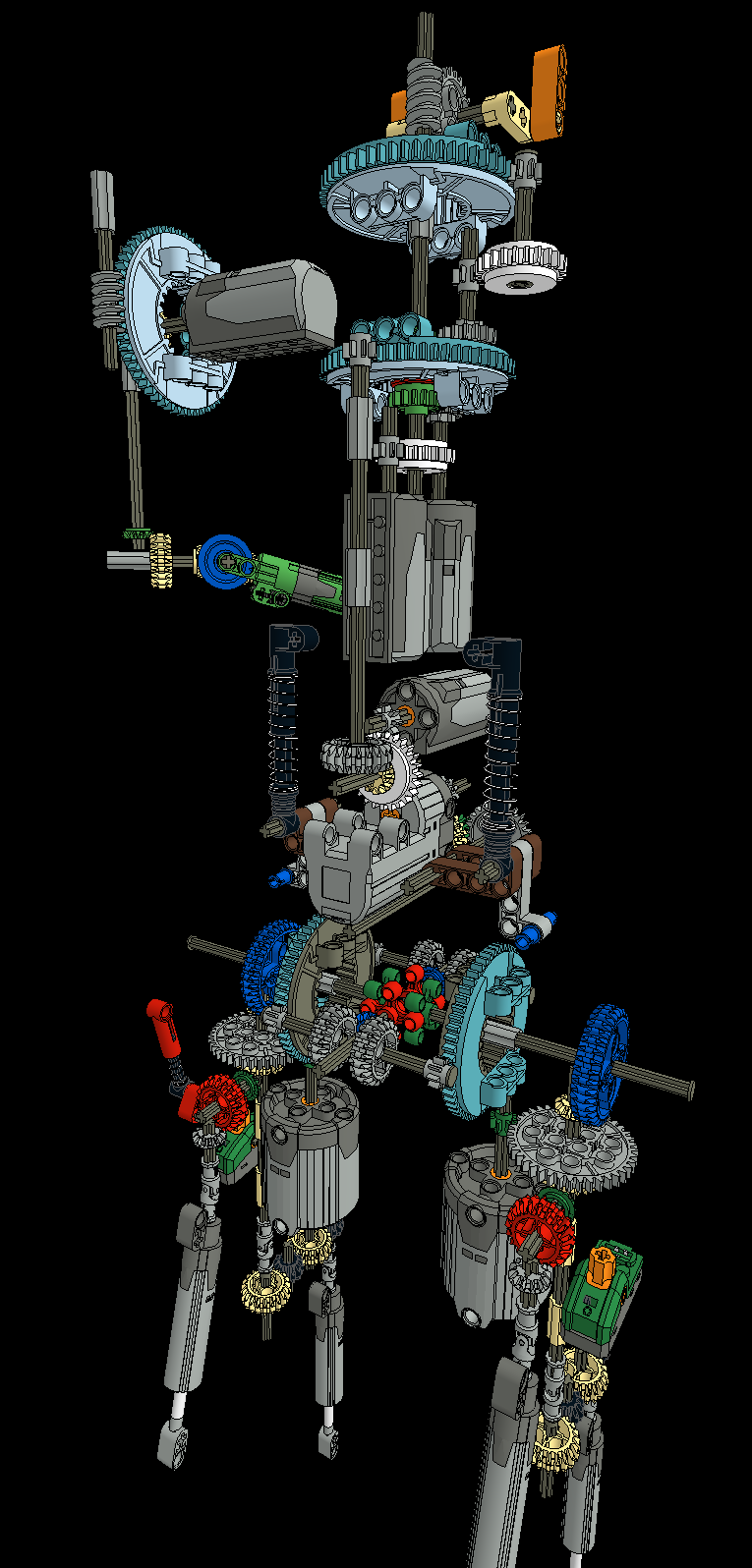
Mechanizm jest jeden ale duży. Odpowiada za zginanie nogami w trzech punktach. Pierwszy punkt to biodro napędzane dwoma obrotnicami w czterech punktach (zębatki z8) dla rozładowania obciążeń. Drugim punktem jest kolano a trzecim staw skokowy, oba poruszane siłownikami.

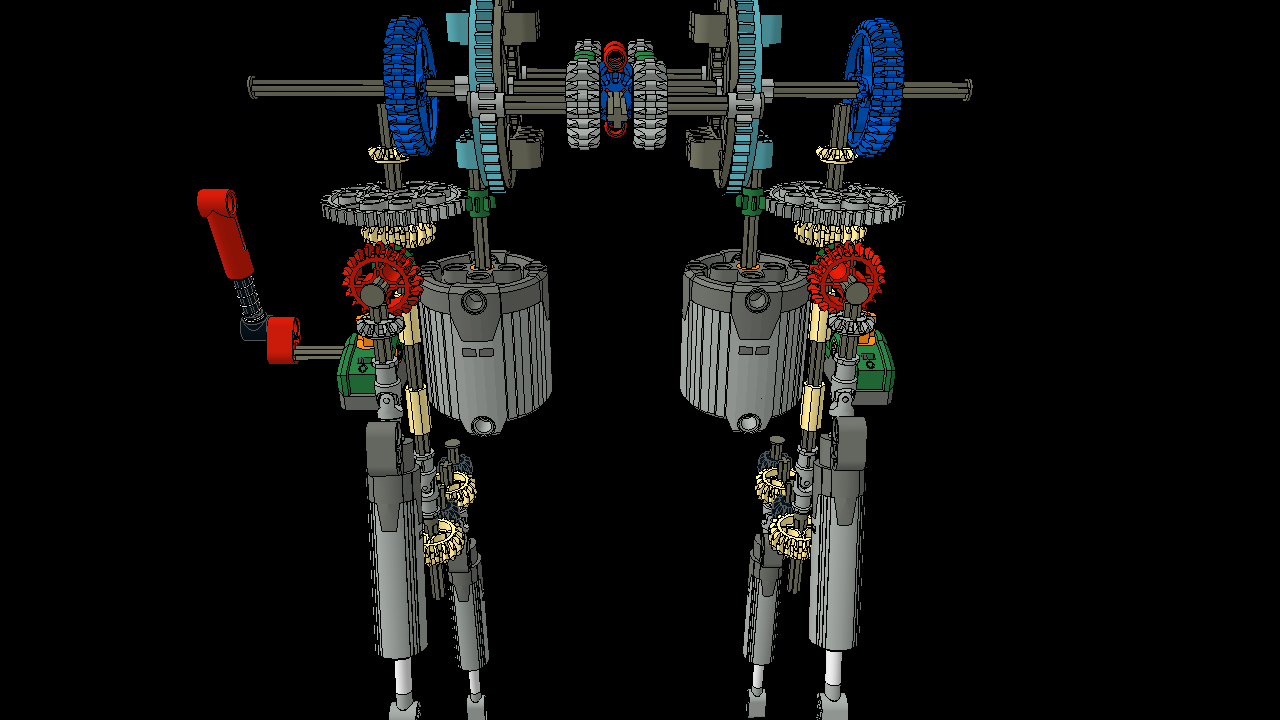

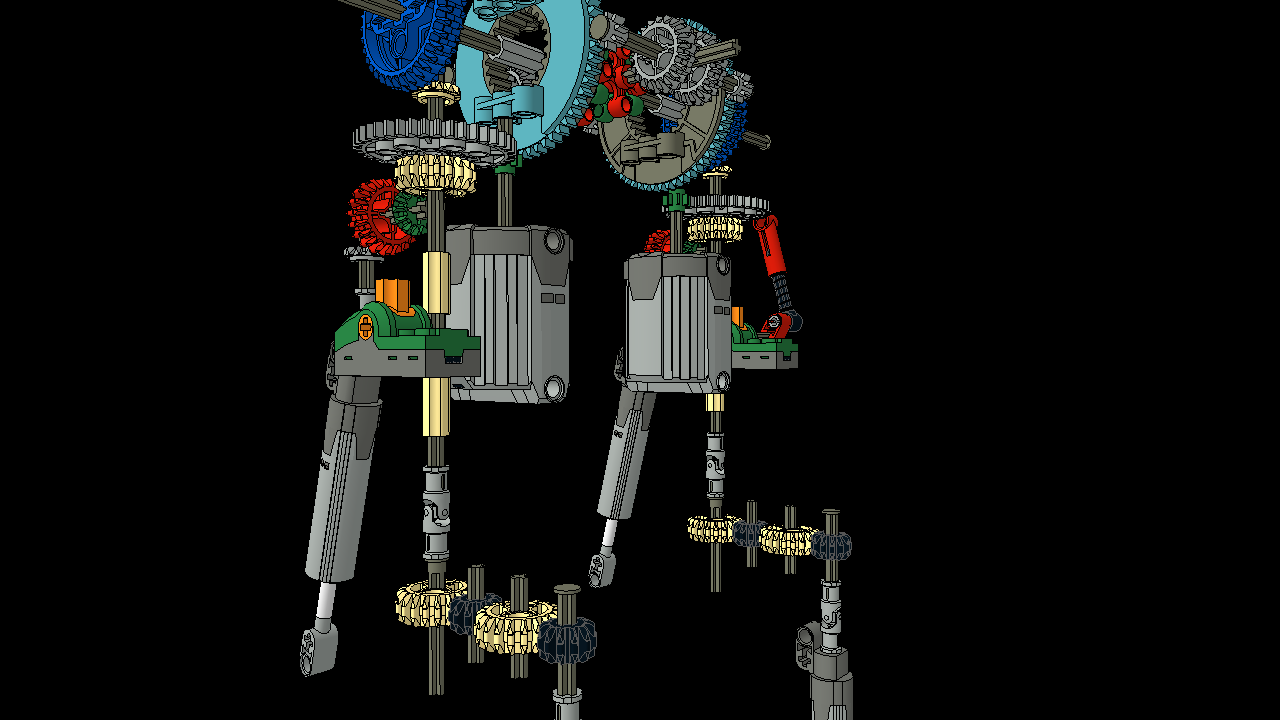
Mechanizm ma pewną wadę i słaby punkt – to kilka zębatek tuż przy górnym siłowniku. Układ jest dość dziwaczny ale wymusza go synchronizacja z dolnym oraz fakt iż pomiędzy siłownikami musi być różnica jednej zębatki licząc od głównej osi napędowej (zębatka z40), czyli parzyste na nieparzyste. Dodatkowo siłowniki musiały zostać przyspieszone.
Wada ta ujawniła się na wystawie w Rzeszowie, kiedy to po kilku próbach chodzenia, obciążenia na płaskiej z12 wysunęły z niej ośkę (4). Zębatka się uszkodziła po czym wypadła rozregulowując cały mechanizm. Niczym reakcja łańcuchowa pociągnęła za sobą drugą z drugiej nogi. Niestety dalsze prezentacje mogły się odbywać tylko po kilka kroków.
Obecnie jedyne co mogłem poprawić to np. dać ośkę (4) ze stopem od strony płaskiej z12 (nie ma możliwości wysunięcia), oraz wzmocnić zabudowę.
W łydkach zabudowane są 2 pakiety baterii dość łatwo dostępne. Pierwszy zasila wyłącznie nogi a drugi całą resztę.
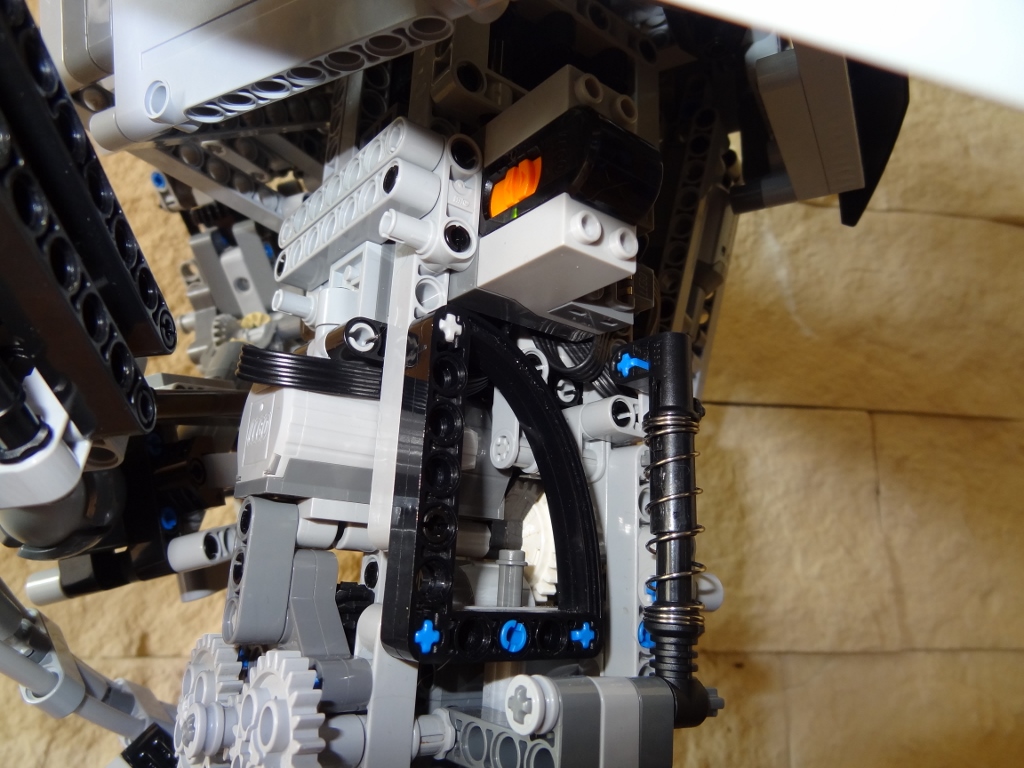
Mechanizm automatycznego chodzenia oparty jest na przełączniku i amortyzatorze i działa dobrze we współpracy z pilotem o płynnej regulacji.
Drugi przełącznik jest konieczny dla zmiany kierunków obrotów obu silników podczas ich jednoczesnej pracy. Ma to związek z sekwencją ruchu nóg a w szczególności siłowników. Po prawej stronie biodra bardzo ważna jest tu strona po której jest zębatka z36 względem płaskiej z12.

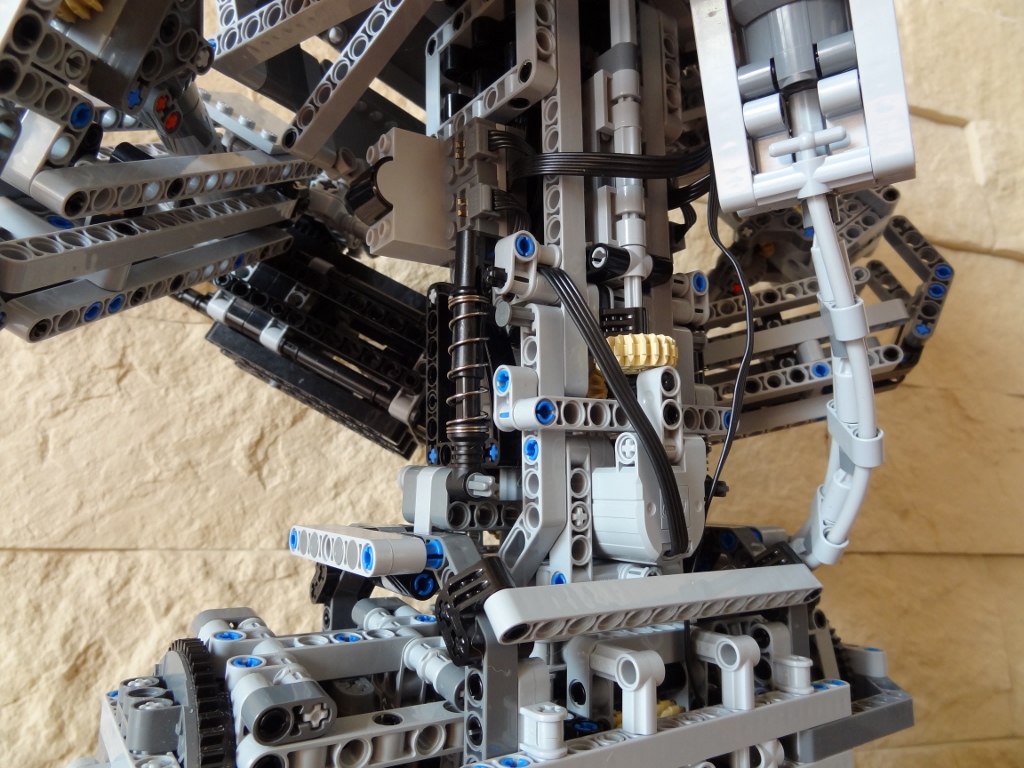
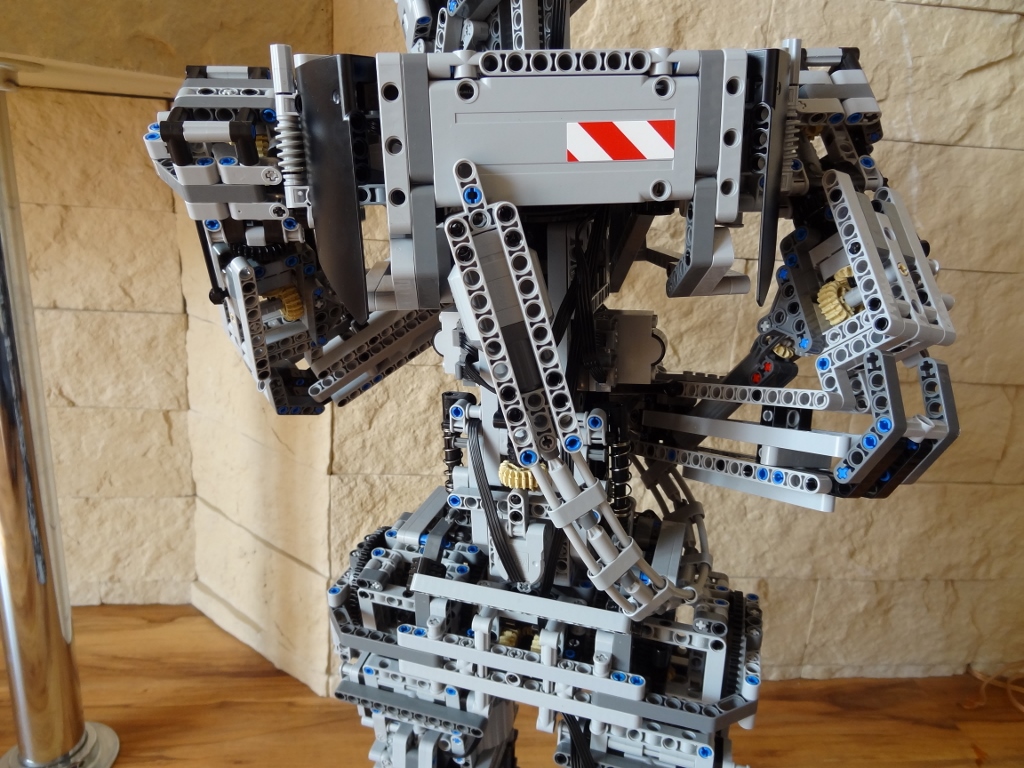
Kręgosłup
To główny element tułowia. Jest wąski i koncentruje w dolnej jego części serwo i 3 silniki M. Wszystkie napędy z silników poprowadzone są do góry po to by barki i głowa były jak najlżejsze.

Balans tułowia
Do tej funkcji zastosowałem serwo, troszkę zredukowałem jego kąt obrotu oraz obciążyłem twardymi amortyzatorami z Unimoga. W założeniu funkcja ta miała służyć możliwości skręcania podczas chodzenia ale działa na skręcanie dość słabo. Znacznie lepiej oddziaływa na skręt gdy dodatkowo obróci się tułowiem. Mimo to sama funkcja działa dobrze i bardzo pomaga przy skręcie tułowia.

Obrót tułowia
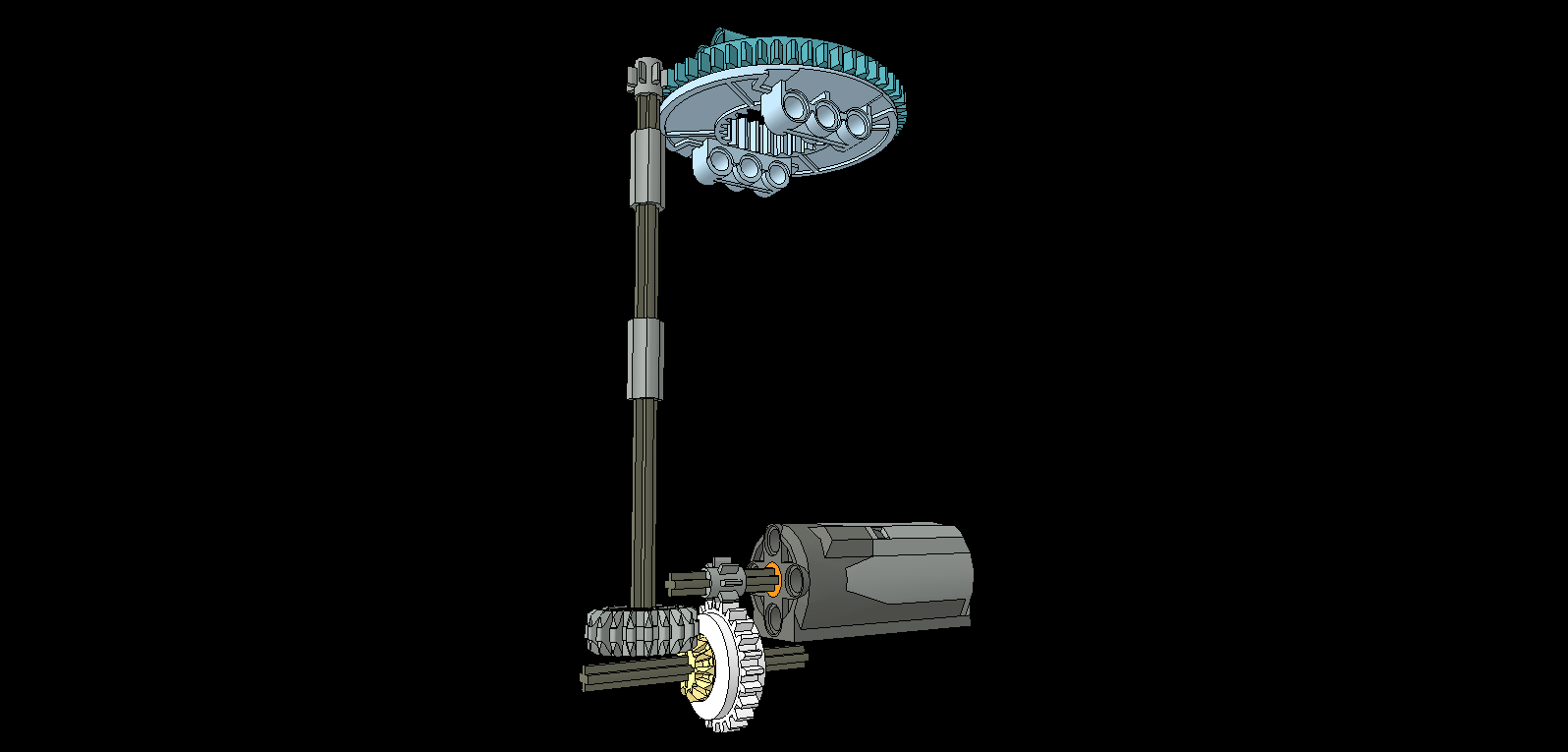
W poprzedniku obrotnica do obrotu tułowia była nisko osadzona, dźwigała ogromny ciężar i
była poddawana ogromnym przeciążeniem, zdarzało mi się ją rozerwać. W tym robocie obrotnica jest osadzona bardzo wysoko dzięki czemu punkt ciężkości jest daleko pod nią. Zniknęły wszystkie naprężenia jakie były w poprzedniku. Do sterowania obrotem służy 1 silnik M. Dodatkowo mechanizm jest zabezpieczony sprzęgłem.
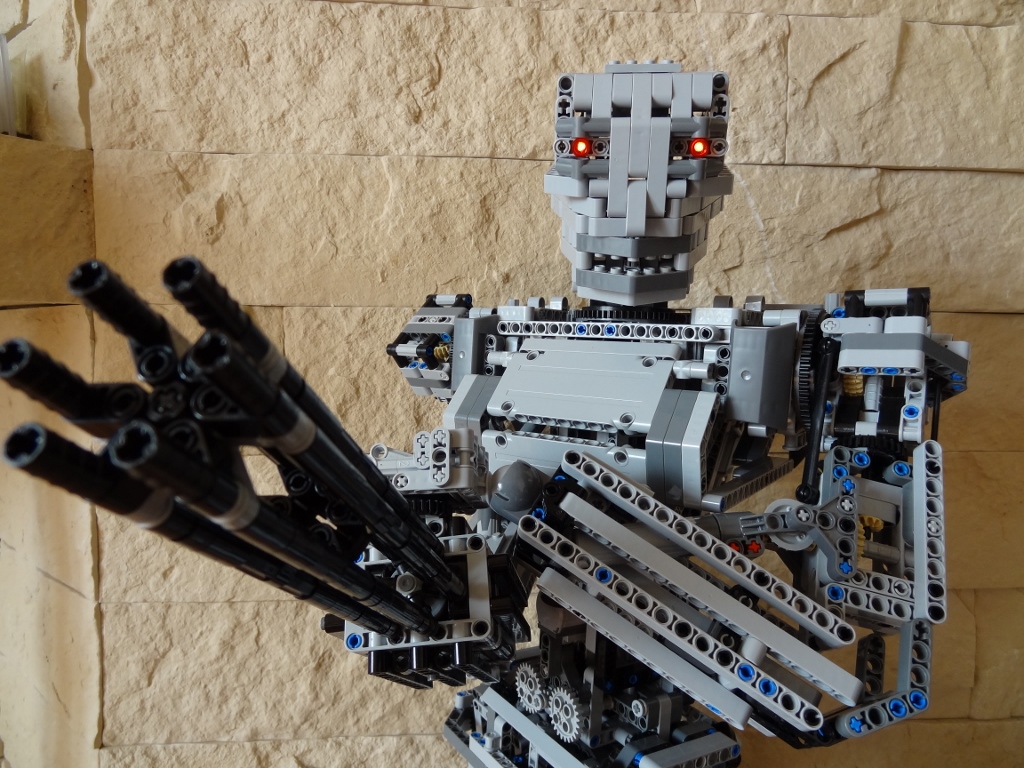
Głowa
Głowa jest trochę mniejsza a twarz nieco inaczej wymodelowana (czy lepiej?). W środku nic nie ma a jedyny mechanizm jest w szyi. Głowa porusza się na boki oraz do góry i na dół. Dwa silniki M do jej poruszania są w kręgosłupie a całość jest zabezpieczona sprzęgłami. Oczy oczywiście wyposażone są w światła tak jak w poprzednich wersjach.
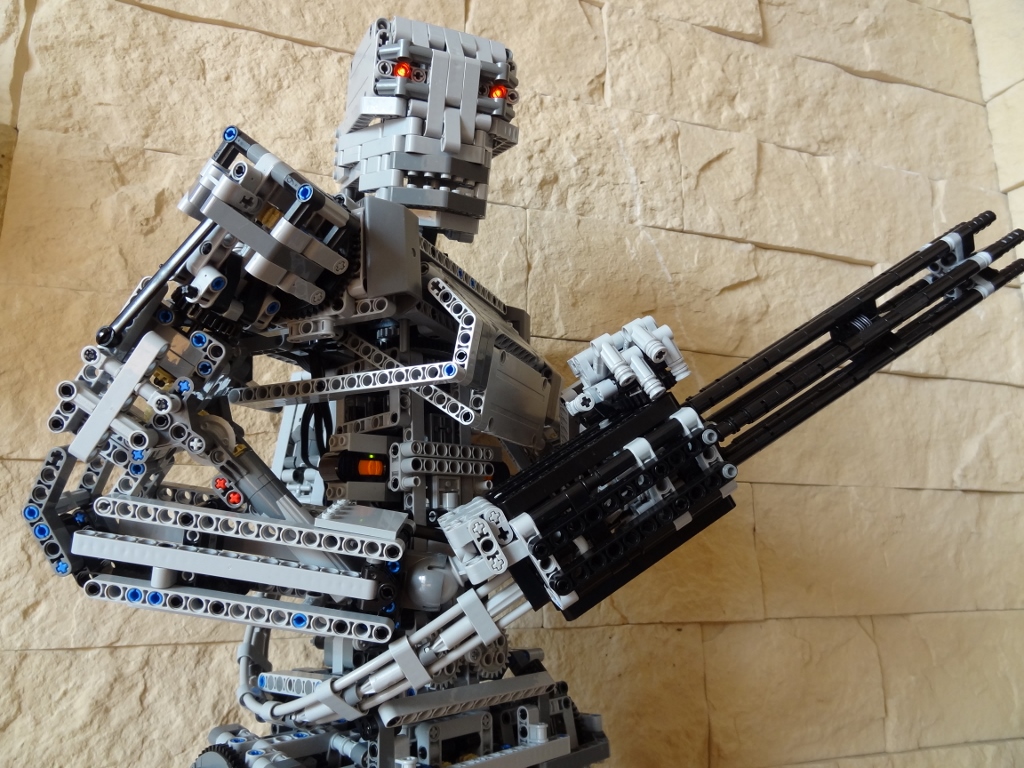
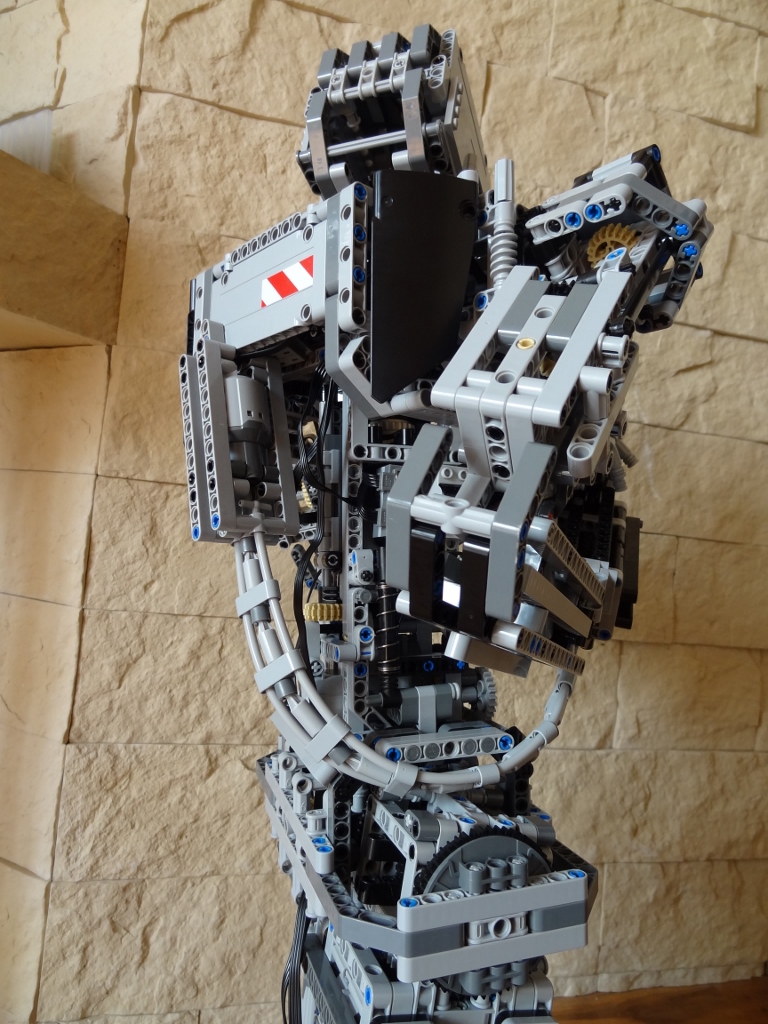
Ręce
Robota budowałem pod konkretną czynność. Ręce zachowują proporcje do reszty. Wykorzystują kilka obrotnic przez co dają sporo możliwości regulacyjnych. Regulacja jest ręczna i wykonuje się ją tylko raz. Robot został wyposażony w broń którą trzyma dwoma rękami. Lewa ręka jest wyposażona w silnik M do poruszania przedramieniem a tym samym do podnoszenia broni.

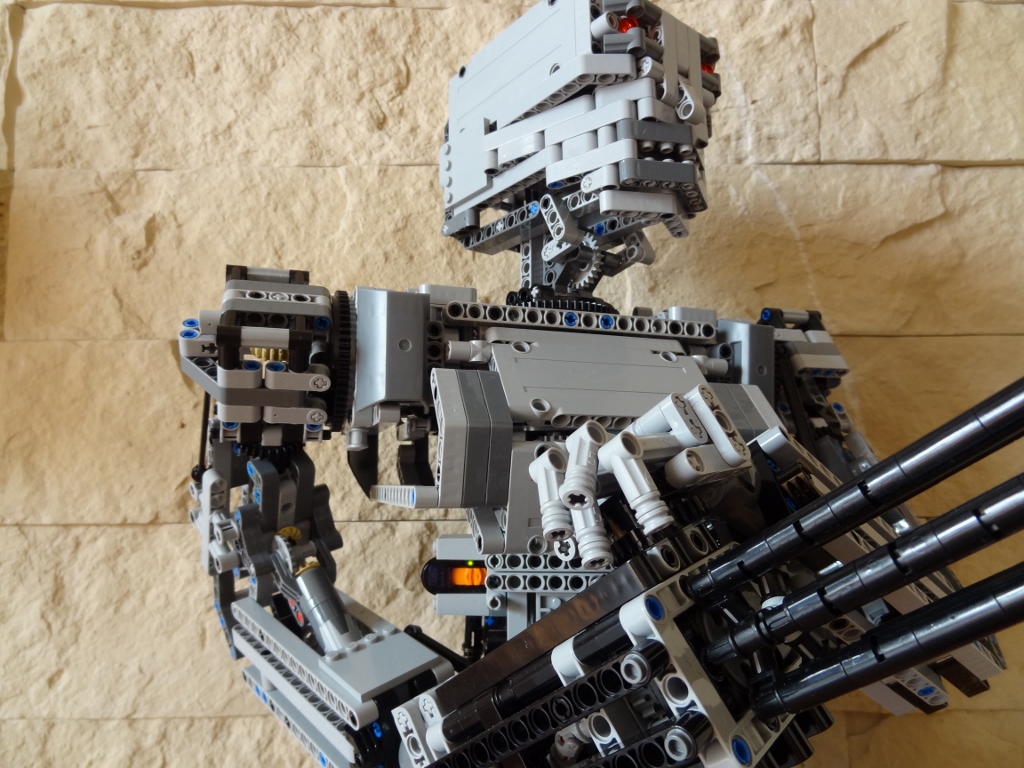
Broń
Sześcio-lufowy M134 minigun na wyposażeniu tego robota wydawał mi się najlepszym wyborem. Sam karabin ma długość 28 cm z czego lufa 19 cm. Lufa ma własny napęd i obraca się. Początkowo był w niej silnik M który bardzo szybko obracał lufami. Rozwiązanie to z jednej strony banalne a z drugiej ciężkie musiałem zmienić. Postanowiłem napęd doprowadzić z zewnątrz ale w sposób bardziej efektowny. Napęd doprowadzony jest za pomocą "taśmy z amunicją" od tyłu. Na plecach umieszczony jest zasobnik z "amunicją" i silnik L który napędza lufy. Silnik z tyłu odrobinę równoważy ciężką broń z przodu. Wybór silnika L podyktowany był dużą stratą mocy na "taśmie".
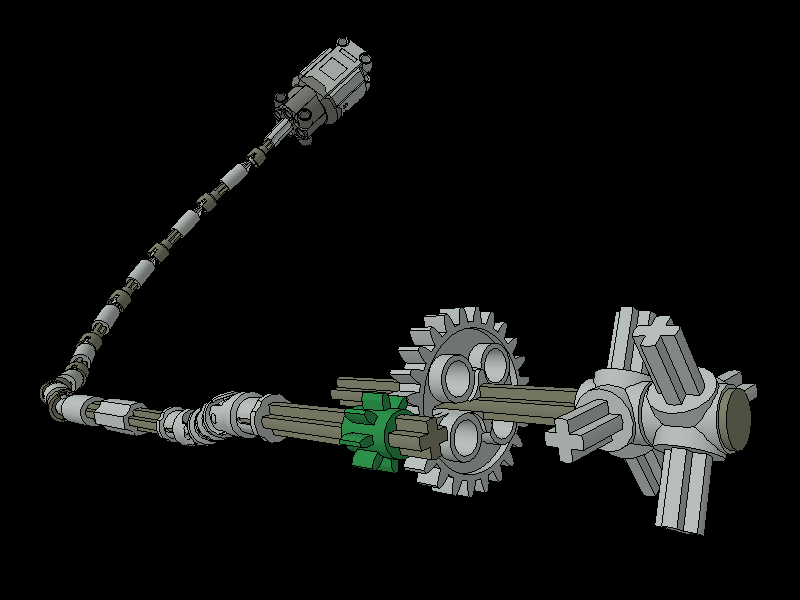
Wszystkie klocki kupuje wyłącznie na allegro, takiej części nigdy tam nie widziałem a nawet nie wiedziałem o jej istnieniu. Z zasady buduje wyłącznie z tego co aktualnie mam i nie kupuje klocków pod konkretnego MOCa. Patrząc na zdjęcie tego elementu obawiam się że nie nadał by się3dom pisze:Karabin wyszedł bardzo fajnie a pomysł na doprowadzenie do niego napędu jest świetny. Aczkolwiek, tak jak Ci mówiłem, tutaj idealnie sprawdziłaby się znapowa ośka. Pomyśl o niej ;)
z uwagi na jego długość i duże obciążenie jakie by musiał przenieść.
Podsumowanie
Terminator 3 jest odrobinę mniejszy i lżejszy od poprzednika, ma wiele wad ale także zalety. Budując go chciałem osiągnąć pewną niepowtarzalność. W swoich MOCach kieruje się zasadą: musi być trudno, musi być inaczej, musi mnie czegoś nauczyć. Wyglądu nie oceniam, pozostawiam to Wam. Serdecznie zapraszam do obejrzenia filmu oraz wyrażenia swojej opinii.


Galeria
Film
[youtube]http://www.youtube.com/watch?v=dJqnymAQCpg[/youtube]
Więcej MOCy na moim kanale YouTube




