po długiej przerwie wracam do klocków. Pierwszym moim większym projektem był samochód wyścigowy, jednak zaliczam go do nieudanych. Był wielki (prawie 80 cm długości), ciężki, a przez to zbudowana przeze mnie skrzynia nie miała siły dźwignąć tego kloca. Również zawieszenie było zbyt miękkie, by prawidłowo amortyzować budę i nie przysiadać pod ciężarem.
Kolejna próba zbudowania czegokolwiek zaowocowała złożeniem robota. Jako że mam młodsze kuzynostwo, wiedziałem, że musi się poruszać i mieć kilka ruchomych funkcji. Dysponuję tylko dwoma zestawami klocków: 42025 i 42039. Nie za wiele tu silników (aż 1), przewodów i innych bajerek. Ale od czegoś trzeba zacząć.
Zbudowany robot w założeniu miał mieć kilka funkcji.
Związane z silnikiem elektrycznym:
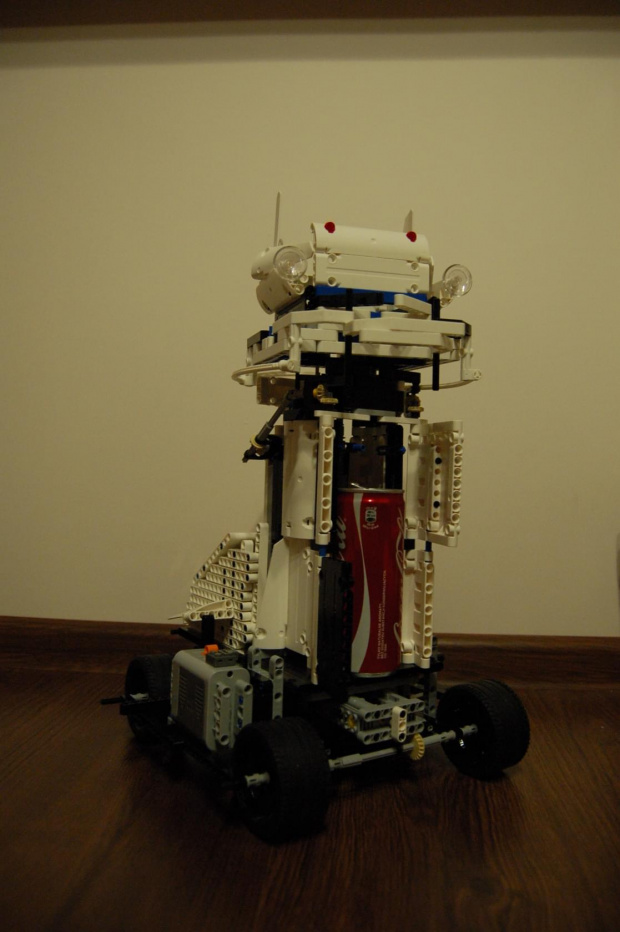
1. Otwieranie klapy przykrywającej napój.
2. Wysuwanie napoju.
3. Jazda.
4. Wentylator.
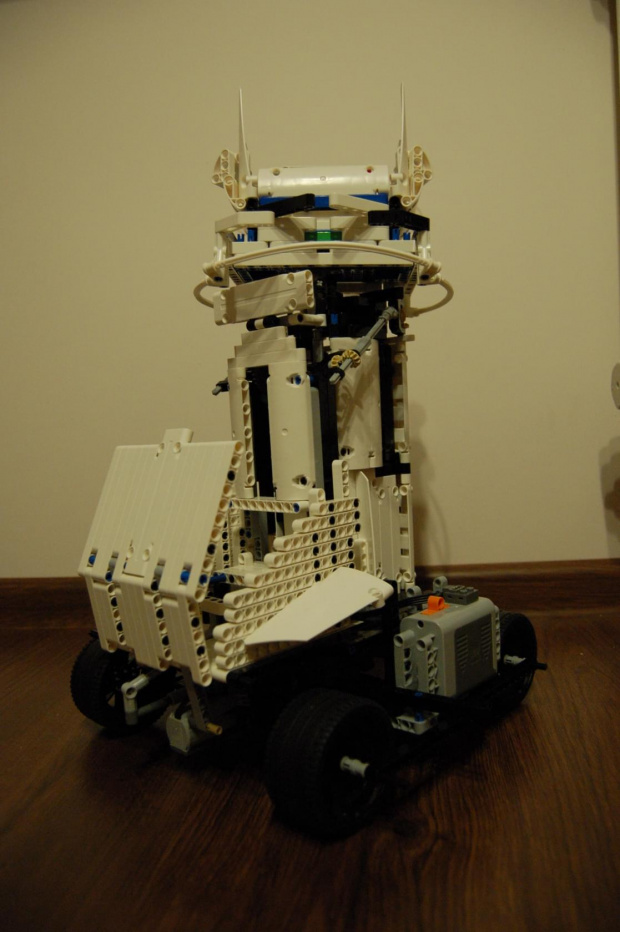
5. Otwierany kufer na cukierki.
6. Otwierana taca na drobne pieniążki.
Mechaniczne bez silnika:
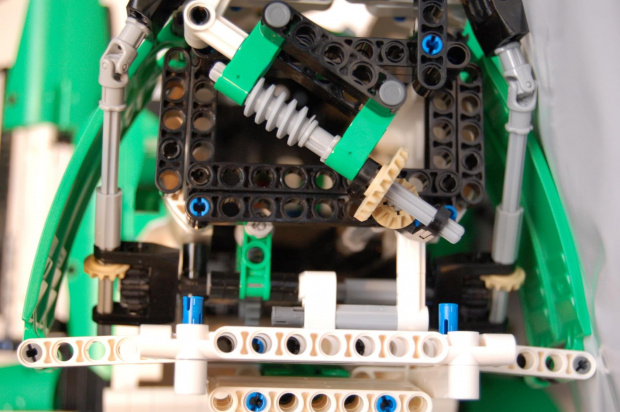
1. Ruchoma głowa.
2. Łapka, która mogłaby coś chwycić na zasadzie spinacza.
3. Ruchoma ręka (góra/dół).
4. Strzelanie kulkami/wykałaczkami.
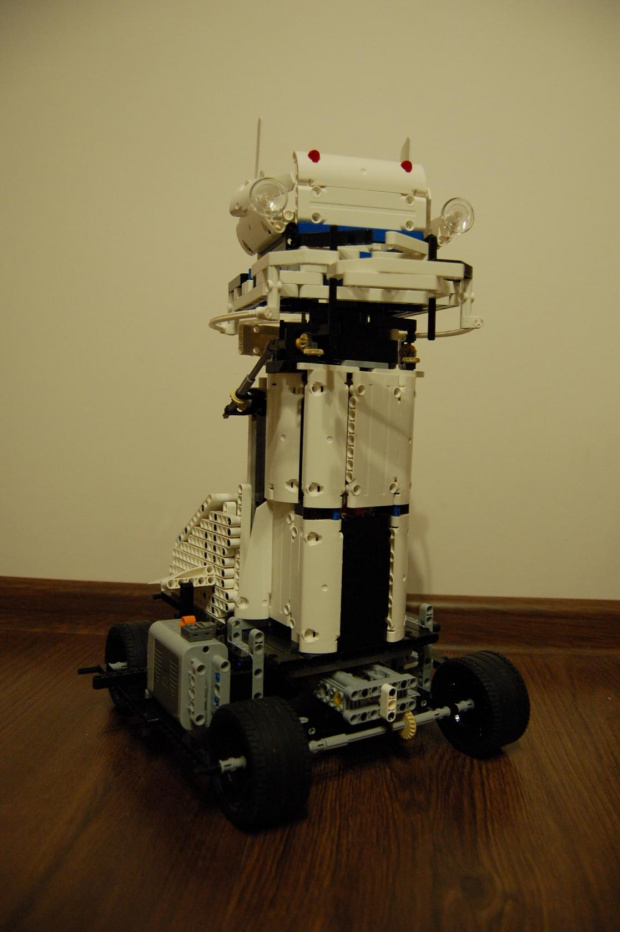
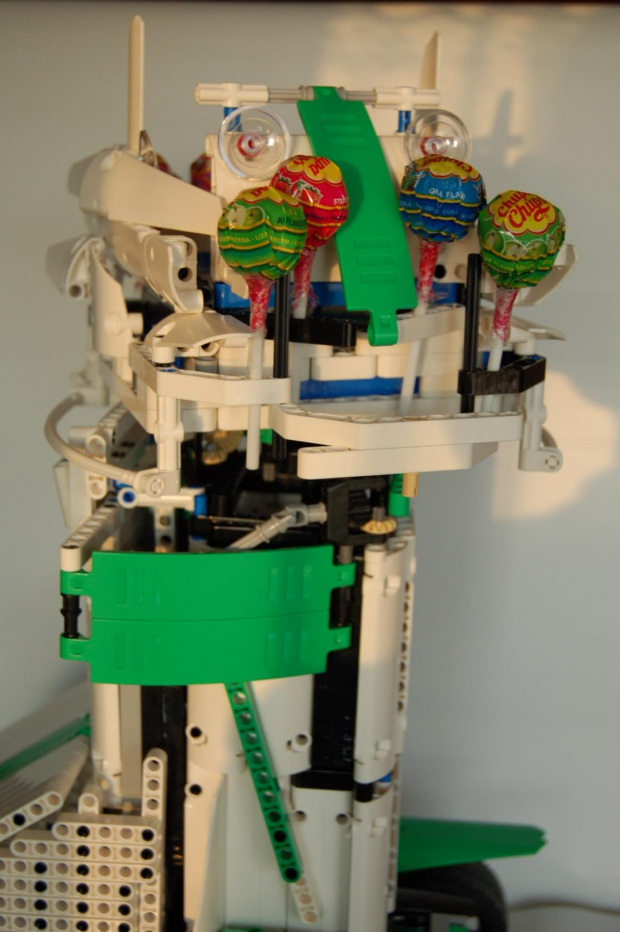
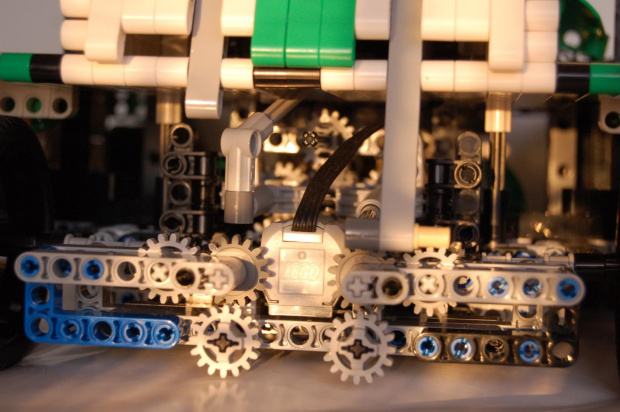
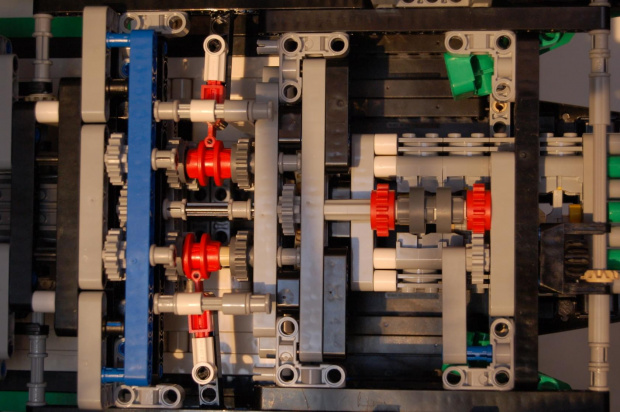
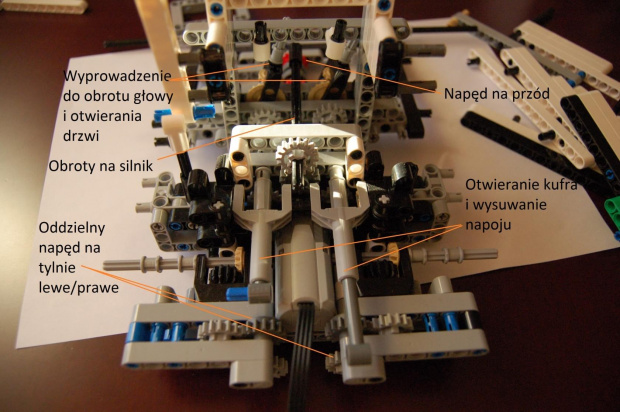
Jak to bywa podczas budowania, pomysły się zmieniają, ubogacają i nie inaczej było tym razem. Zbudowany robot jeździ (na razie napęd na przód, ale w planach jest też napęd na tył + na 4 koła - zmieniamy za pomocą przekładni), poruszają się tłoki silnika po włączeniu silnika elektrycznego, można włączyć obrót głowy (równolegle z jazdą), w której jest miejsce na włożenie lizaków/cukierków, otwierają się dzrzwiczki, za którymi stoi puszka z napojem. Napój się również wysuwa do przodu. Jest też otwierany kufer na kolejne smakołyki. Nie ma jak w planach wentylatora, wyrzutni kulek/patyczków, ruchomej ręki, a głowa porusza się dookoła za pomocą silnika elektrycznego.
Wysokość 45 cm, podstawa 25x25 cm.
Robot cieszy się uznaniem wśród najmłodszych (chyba nie przez to, że ma w sobie słodycze ; ) ). Jest to pierwsza wersja, którą udoskonalę. Ale najpierw proszę o rady, co można zmienić, jaką fajną funkcję (przy posiadanych elementach) można jeszcze dodać, co można zrobić lepiej, stabilniej.
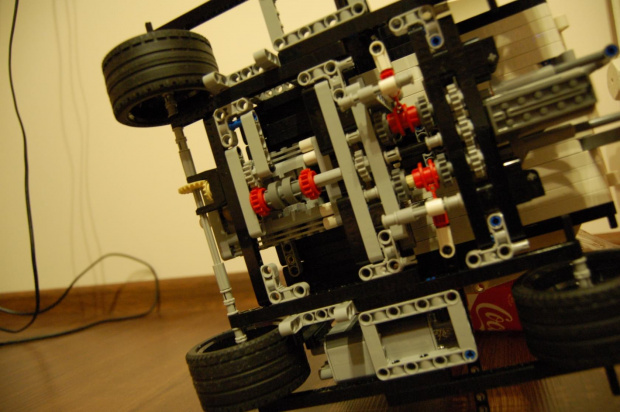
Dodam, że nie chciałem tu amortyzacji, nie chciałem dyferencjału, ponieważ doświadczenia z poprzednim samochodem pokazały, jak bardzo to osłabia napęd. Obecny napęd na przednią oś dobrze się spisuje, ale w ramach wybajerzenia chcę, by można było wybierać napęd na przód, tył bądź na obie osie.
Na początek dodaję kilka zdjęć, niebawem nakręcę film i zrobię szczegółowe zdjęcia mechanizmów. Z góry dziękuję za konstruktywną krytykę i rady.