Dane techniczne:
Wymiary: dł. 41s / szer. 28s / wys. 14s
Waga: 0.421 kg
Napęd: 2 x PF Medium z redukcją 8:1
Od dawna kręciły mnie mechanizmy kroczące, i pewnie gdyby jakieś pojawiały się na naszym forum częściej, to zmobilizowałbym się do budowy własnego wcześniej zamiast wypuszczać kolejne czołgi :P Niniejsza konstrukcja jest próbą podejścia do tematu walkerów (nie wiem jak to spolszczyć, łazików?) w sposób możliwie najprostszy i podbawiony zbędnych udziwnień. Zależało mi na czymś, co sprawdza i demonstruje prostą konstrukcję nóg, dlatego zrezygnowałem m.in. ze zdalnie sterowanych szczęk do łapania przechodniów za kostki :)
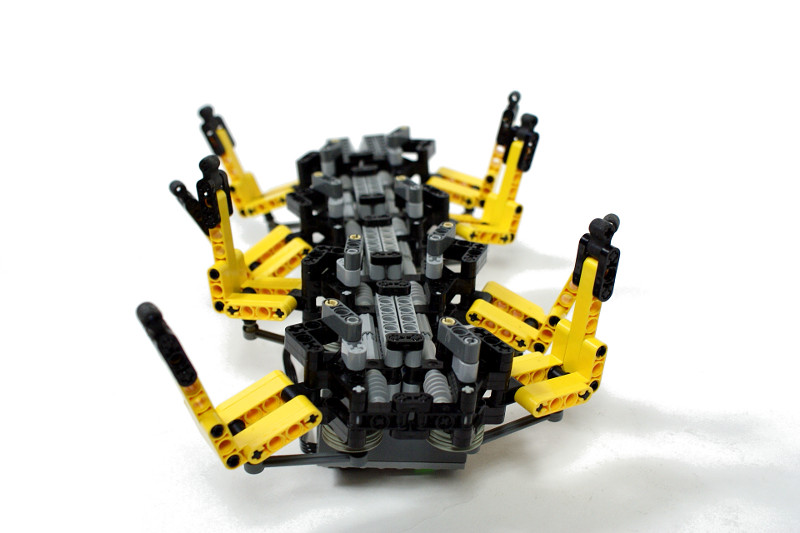
Cała konstrukcja powstała w jeden wieczór, a zaczęła się od rozmyślań nad nogami pająków i ich zakresem ruchów. Przerobiłem z kilkanaście wersji nogi zanim doszedłem do czegoś co wyglądało sensownie i dawało się napędzać za pośrednictwem jednej zębatki. Potem było już z górki - proste podwozie trzymające początkowo sześć nóg razem, z odbiornikiem i baterią.
Chciałem żeby powstający twór nie tylko chodził, ale również skręcał. Ponieważ pomysł podzielenia nóg na osobne pary skręcane względem sąsiednich wyglądał na skomplikowany, wybrałem prostsze rozwiązanie, czyli napędzanie prawych i lewych nóg osobnymi silnikami. Pozwoliło to precyzyjnie sterować łazikiem, a nawet obracać go w miejscu, ale doprowadziło do wydłużenia go o kolejną parę nóg. Dlaczego? Sześcionogi łazik może poruszać się stabilnie dopóki jego nogi są zsynchronizowane - tzn. nogi po lewej i prawej stronie dotykają ziemi jednocześnie. W ten sposób całość ma zawsze zapewnione trzy punkty podparcia, co przy odpowiednim wyważeniu całkowicie wystarcza. Niestety, napędzanie prawych i lewych nóg osobno przy braku jakichkolwiek mechanicznych połączeń między nimi sprawiło, że synchronizacji nóg nie dało się utrzymać i pojazd dość często padał na nos albo na tyłek. Po dodaniu czwartej pary nóg problem w zasadzie zniknął, co nie zmienia faktu że układ gdzie wszystkie nogi napędza jeden silnik a drugi zmienia kąt pomiędzy ich parami dałby zapewne lepszą stabilność i ograniczyłby gibanie się całego łazika.
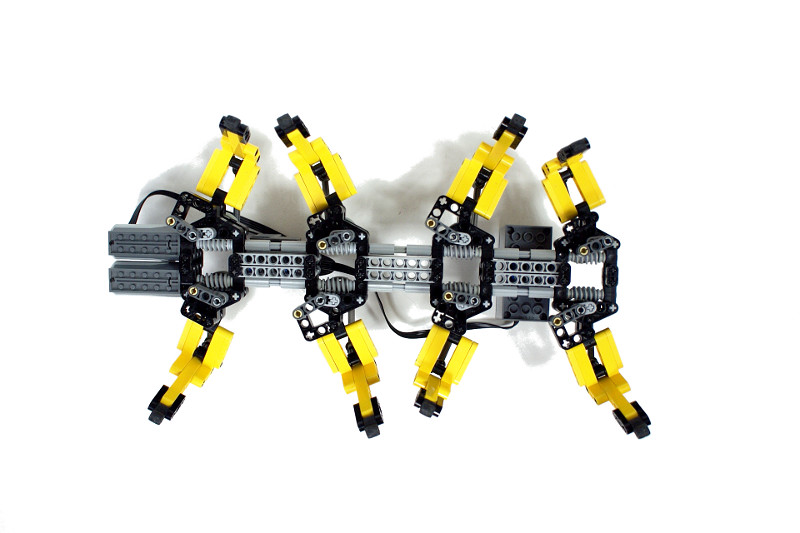
Każda noga jest wprawiana w ruch w dwóch płaszczyznach - wykonuje łuk w osi pionowej, co jest realizowane prostym mimośrodem, oraz podnosi się i opuszcza dzięki cięgnu które łączy je z kołem pasowym działającym jak drugi mimośród. Cały mechanizm udało się osadzić na jednej pionowej osi, którą za pośrednictwem ślimacznicy napędza podłużny wał napędowy w podwoziu.
Z założenia starałem się ograniczyć rozmiary łazika, ale możnaby je łatwo powiększyć zwiększając odstępy między parami nóg, co pozwoliłoby wydłużyć same nogi, a w konsenwencji pozwolić łazikowi poruszać się szybciej i nad wyższymi przeszkodami. Z kolei zamiana kół pasowych na coś o większej średnicy zwiększyłaby zakres ruchu nóg w pionie. Problemem przy takiej konstrukcji nóg jest niestety fakt, że cała waga łazika opiera się na cięgnach. Dlatego, choć jestem zadowolony z tego jak udało się uprościć przeniesienie napędu na nogi, wątpię żeby takie rozwiązanie sprawdziło się przy czymś znacznie większym i cięższym.
Jeśli komuś wydaje się, że łazik w ruchu wygląda niepokojąco, zapewniam że to i tak nic przy tym jakie wydawał odgłosy. Bardzo szybko wyposażyłem wszystkie nogi w gumowe końcówki, po części żeby poprawić przyczepność, ale głównie po to żeby wyciszyć jego tupanie, które było, delikatnie mówiąc, niepokojące :)
Galeria
Instrukcja budowy modułu z 2 nogami
Zdjęcia na zachętę:





I film:
[youtube]http://www.youtube.com/watch?v=240Bs4bmDkc[/youtube]