Model służy to odtwarzania kształtów przedmiotów fizycznych w oknie wykresu 3D.
Najwięcej uwagi poświęciłem na stworzenie oprogramowania. Model od strony hardwaru nie jest bardzo udany. Projekt został zbudowany i zaprogramowany w celu zaliczenia przedmiotu Oprogramowanie Systemów Pomiarowych.
Skrótowo opiszę cały projekt. Jeśli ktoś chciałby wiedzieć więcej na jego temat to chętnym mogę przesłać 20 stron dokumentacji oraz program.
Hardware
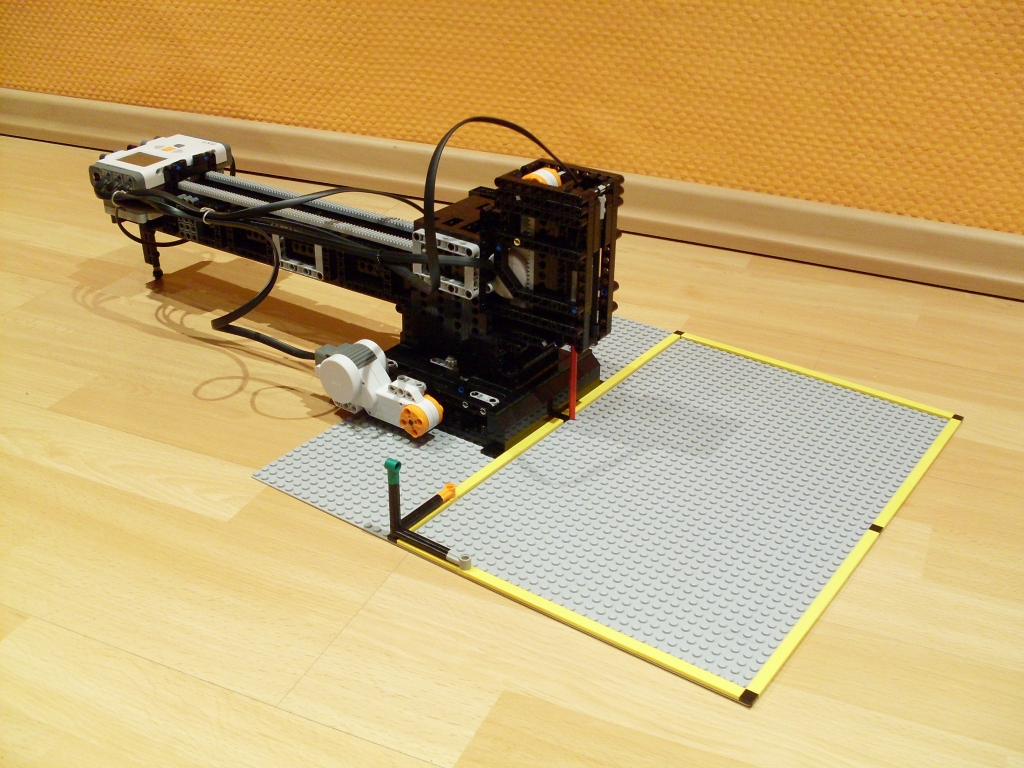
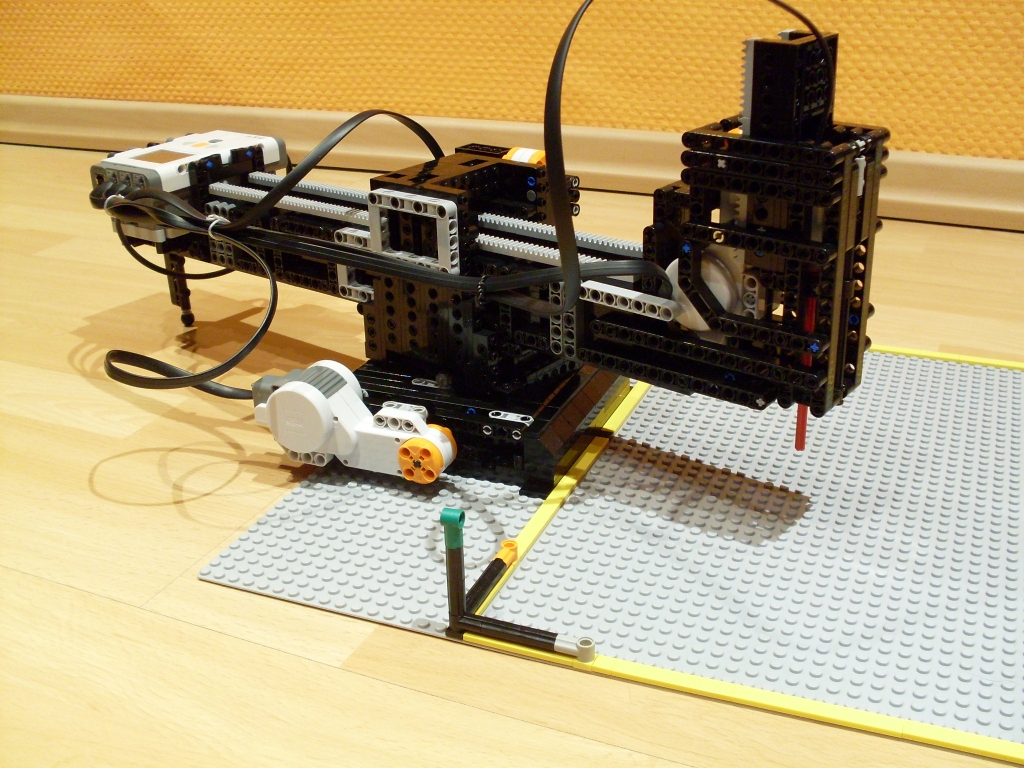
Konstrukcja jest wyposażona w 3 silniki NXT oraz 1 czujnik dotyku.
2 silniki odpowiadają za zorientowanie skanera w osiach x,y.
Trzeci silnik służy do opuszczania/podnoszenia czujnika dotyku na kierunku ozi z.
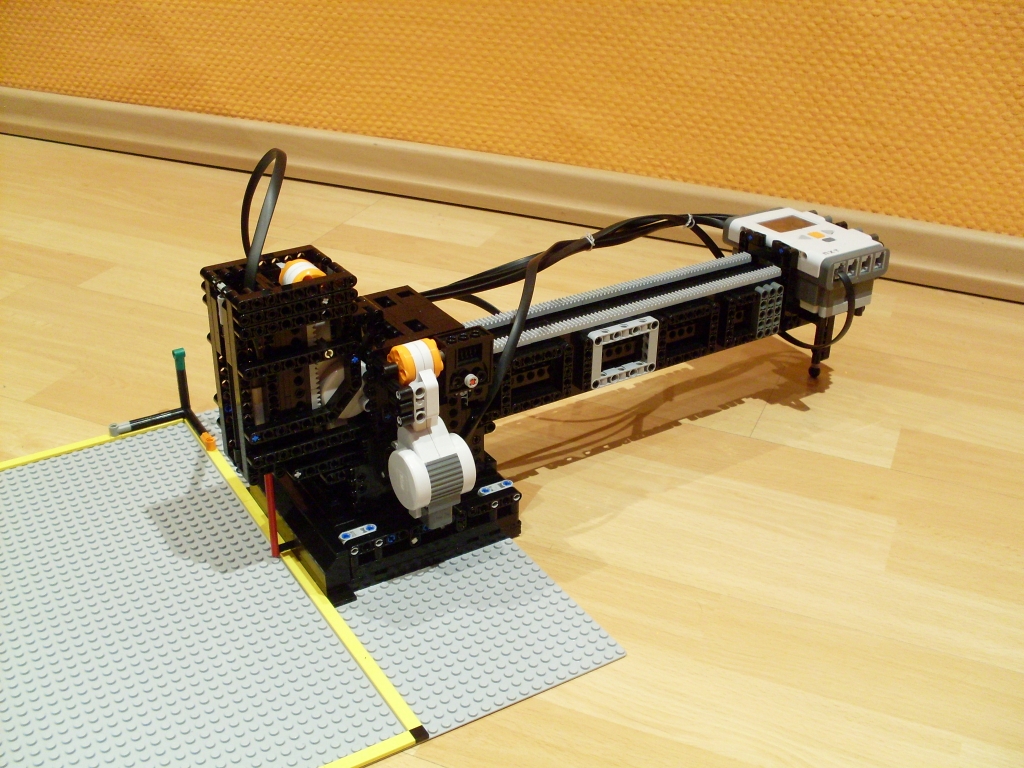
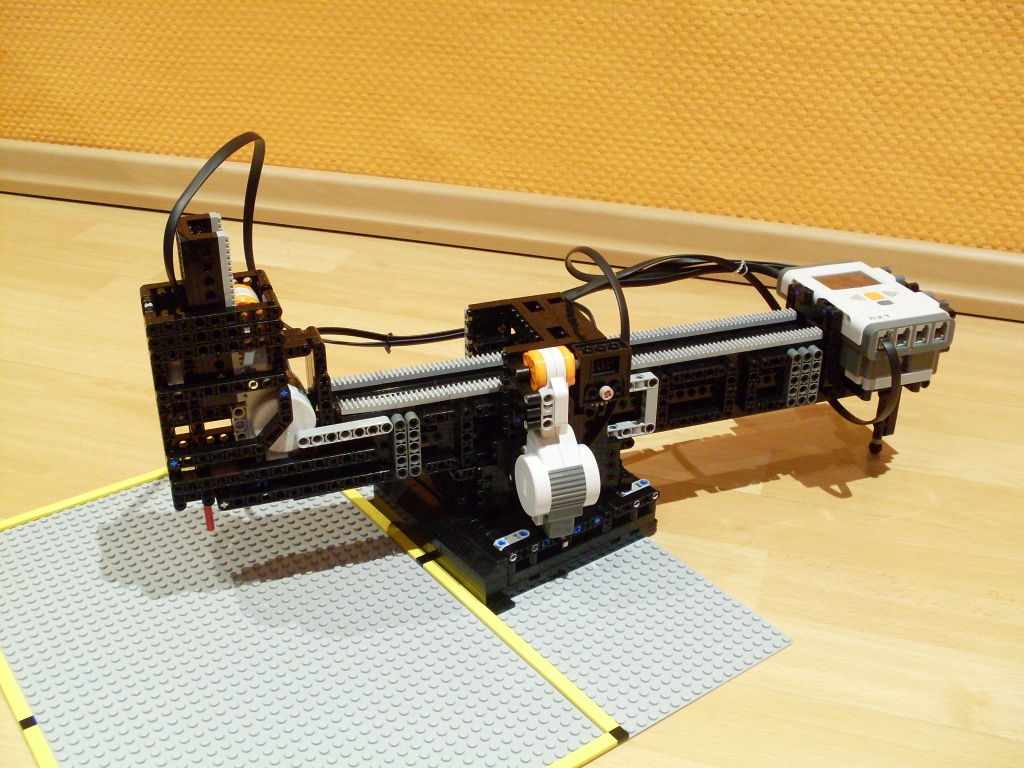
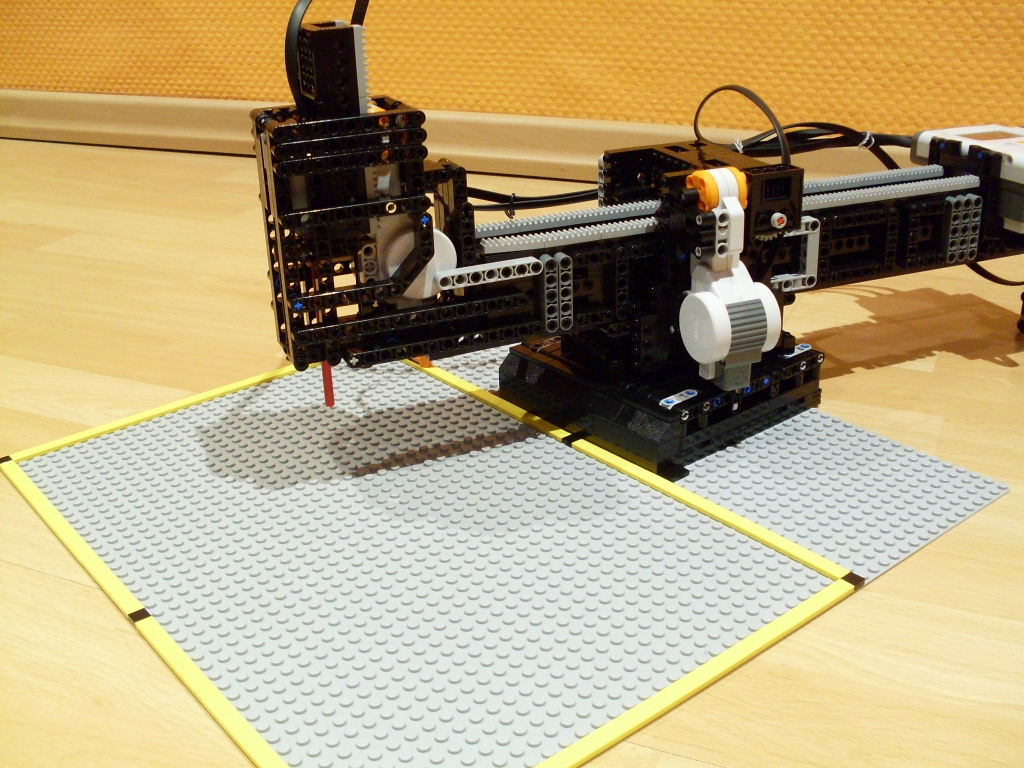
Główne moduły konstrukcji to: obrotowa podstawa, przesuwne ramie oraz ruchoma szyna z czujnikiem dotyku.
Software
Konstrukcja została zaprogramowana w LabVIEW przy pomocy dodatkowego toolkitu do NXT.
Program składa się z 11 subVI (podprogramów) oraz programu głównego.
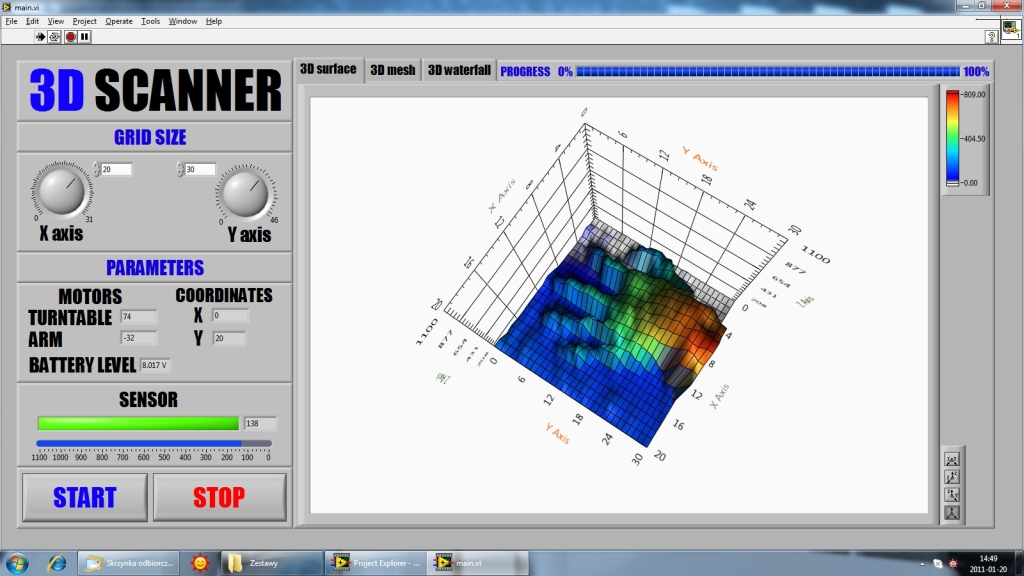
Główne funkcjonalności programu:
-możliwość ustawienie rozmiaru skanowanej powierzchni
-aktualne wskazania: enkoderów silników, czujnika dotyku, poziomu napięcia baterii, współrzędnych x,y
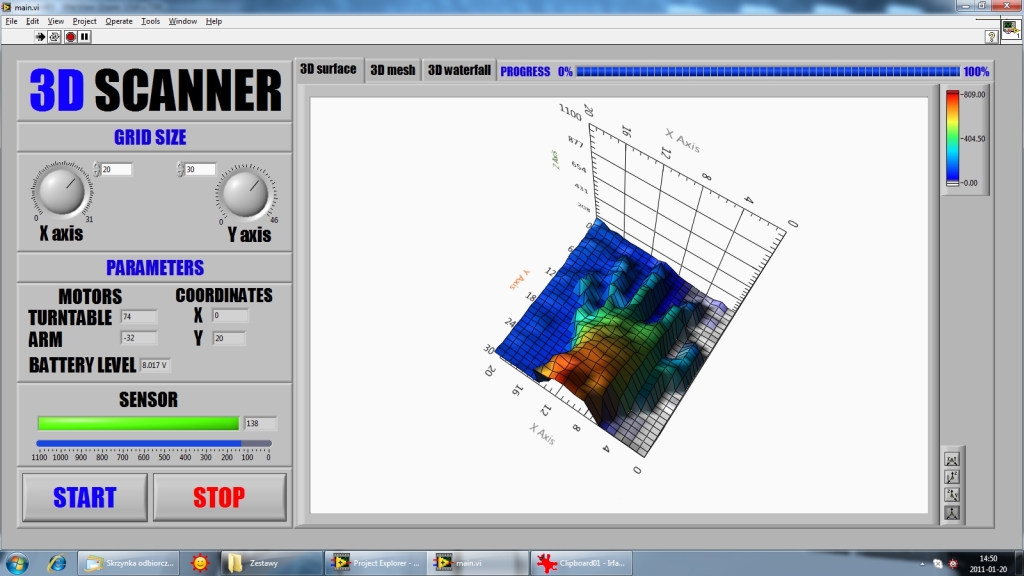
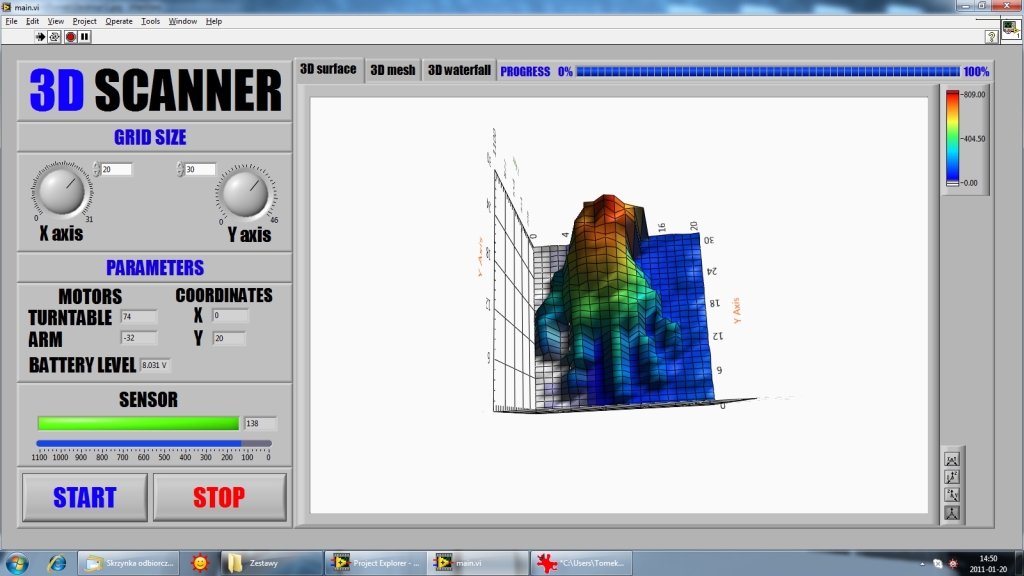
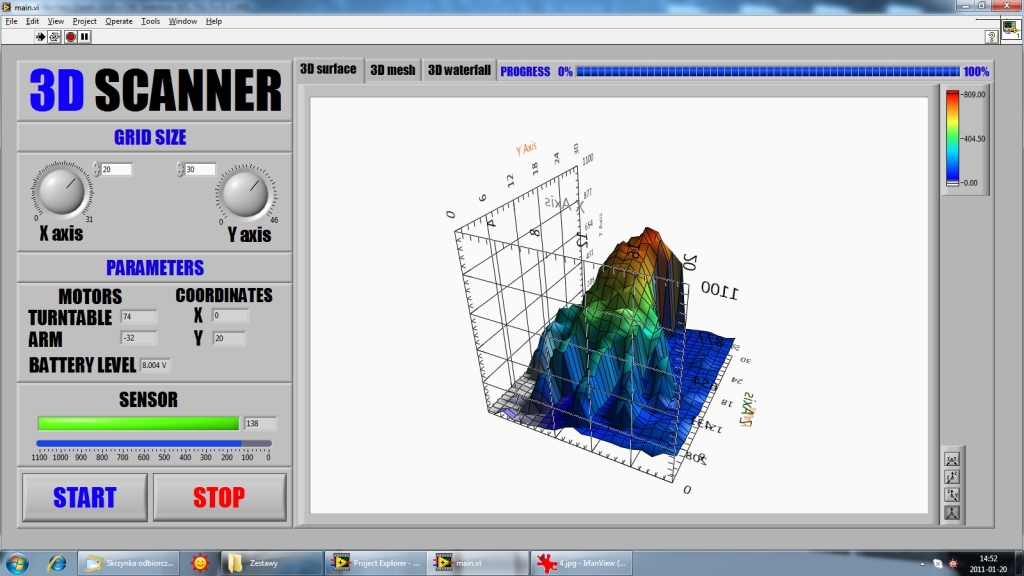
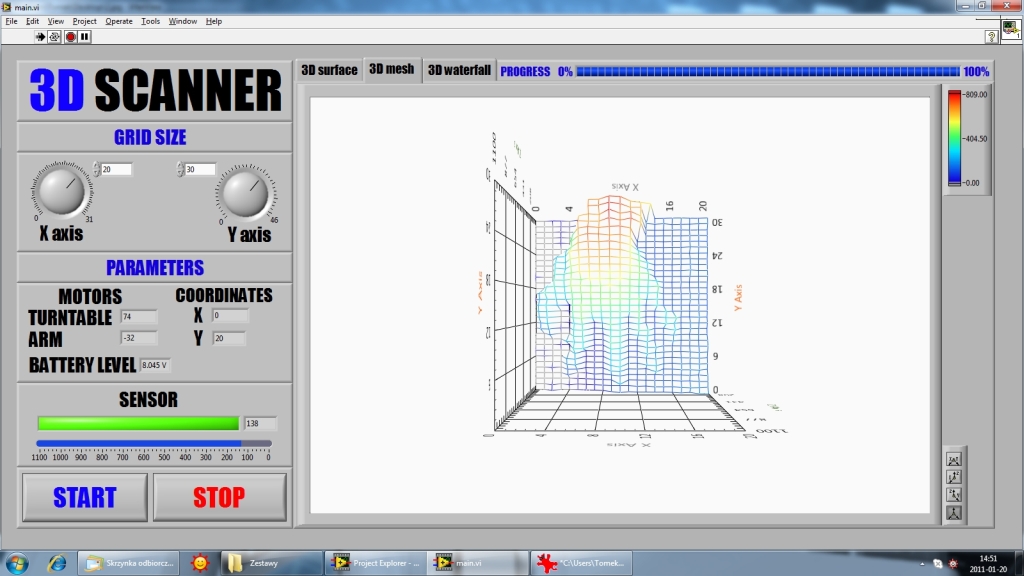
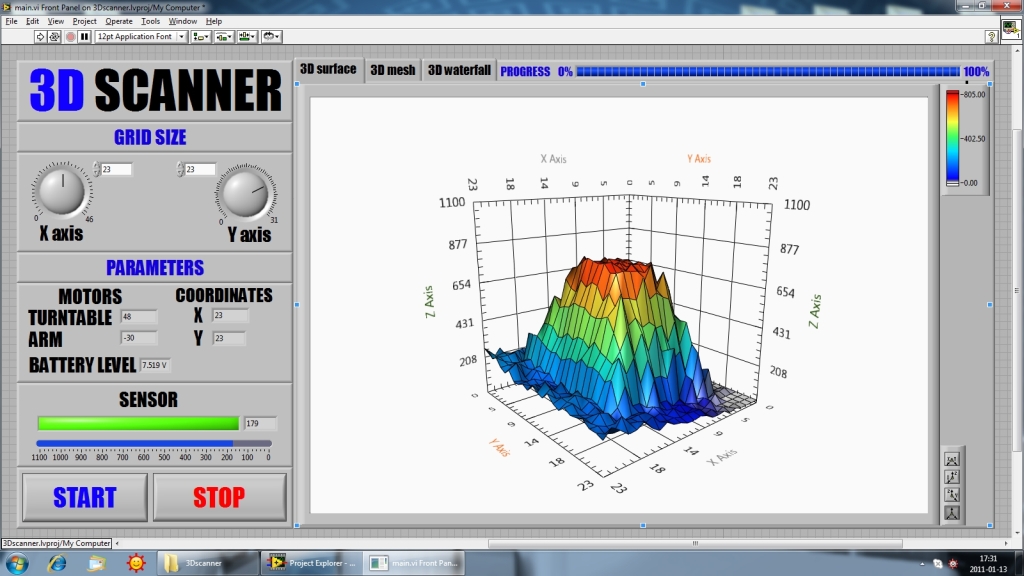
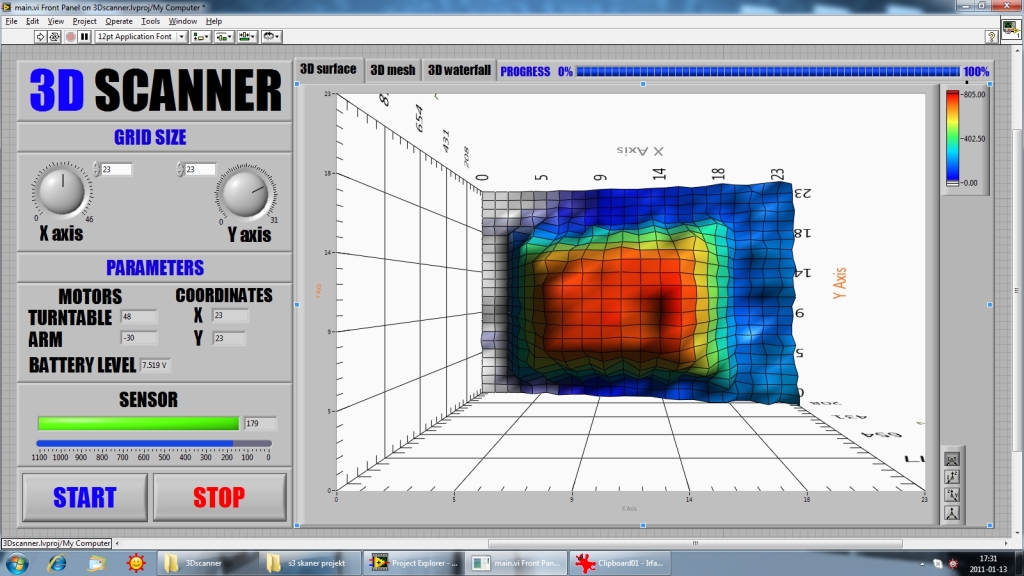
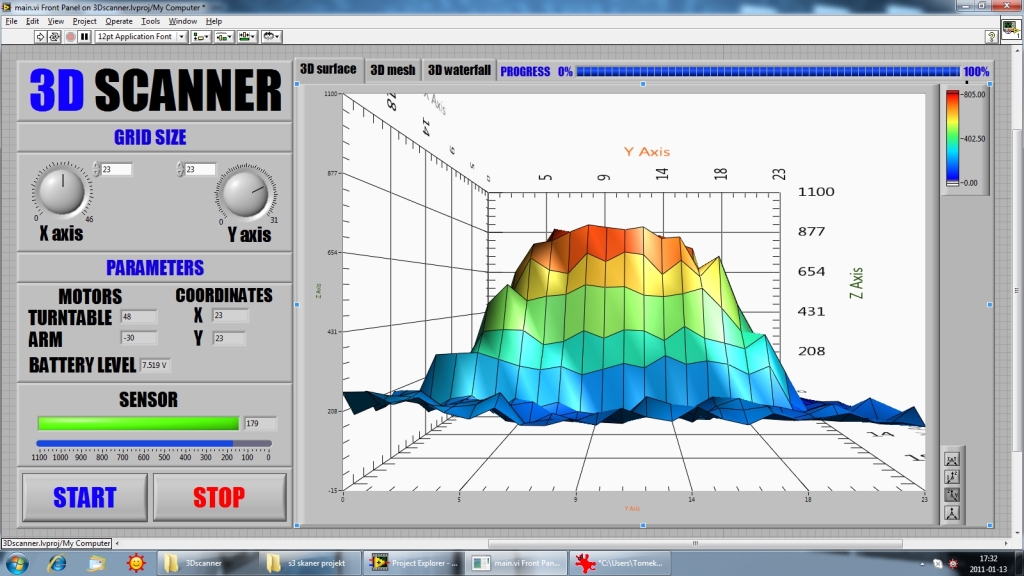
- graficzna prezentacja pomiarów w oknie wykresu
- 3 rodzaje wykresów do wyboru
- możliwość oglądania powierzchni z różnych perspektyw
- pasek postępu
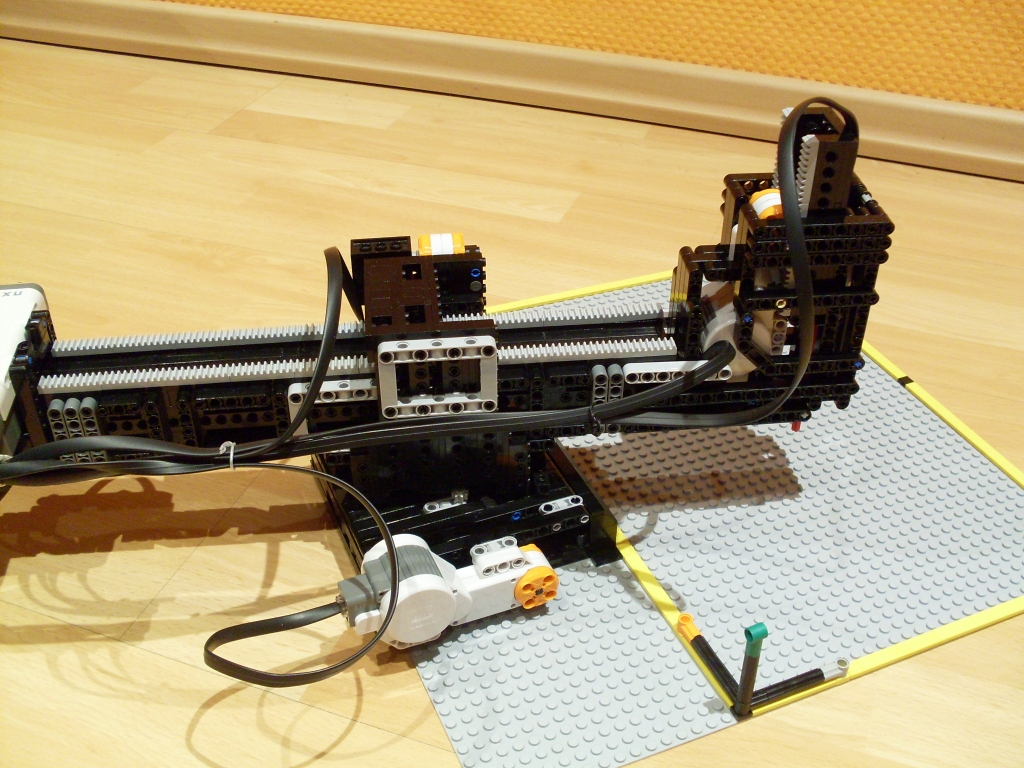
Zasada działania
Po zorientowaniu skanera w odpowiedniej współrzędnej x,y czujnik dotyku zostaje opuszczony w dół. Po dotknięciu powierzchni czujnik dotyku jest zatrzymywany, a wskazanie z enkodera silnika odpowiedzialnego za ruch czujnika pozwala określić wysokość skanowanego punktu.
Przedmiot został zaliczony na ocenę bardzo dobrą.
Film z prezentacją działania skanera
[youtube]http://www.youtube.com/watch?v=RT9RFfDWc4Y[/youtube]
Galeria
http://www.brickshelf.com/cgi-bin/gallery.cgi?f=459489