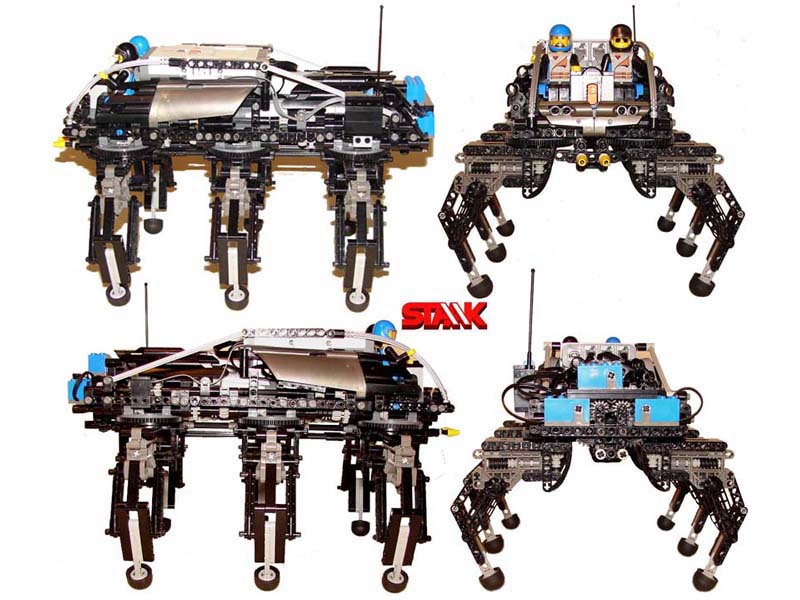
[MOC] Hexapod - sześcionożny robot kroczący Hex
: 2011-08-12, 19:09
Od chwili kiedy w ręce wpadł mi pierwszy Technic Connector 32305 (czemu connector?) wiedziałem, że ta część będzie "chodzić". Była to tylko kwestia czasu...

Dane ogólne.
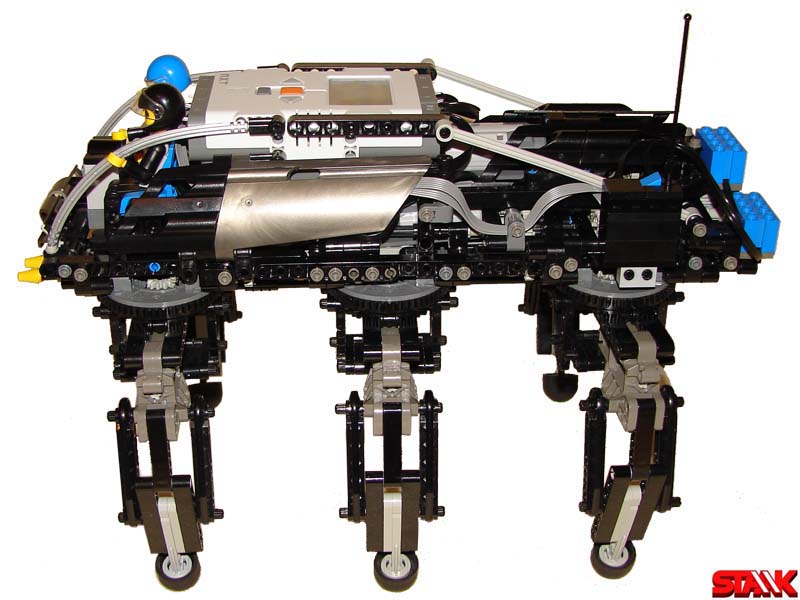
Wymiary:
Szerokość
Nadwozia: 16s
Części kroczącej: 28s
Długość: 42s
Wysokość: 27s (w pozycji nominalnej)
Waga: 1,3 kg (bez antenki)
Osprzęt elektryczny:
1x NXT
1x PF IR Receiver 8884 (zmodyfikowany do współpracy z NXT)
1x PF Pilot IR 8885
3x PF Medium Motor 8883
3x Rotation Sensor 9756
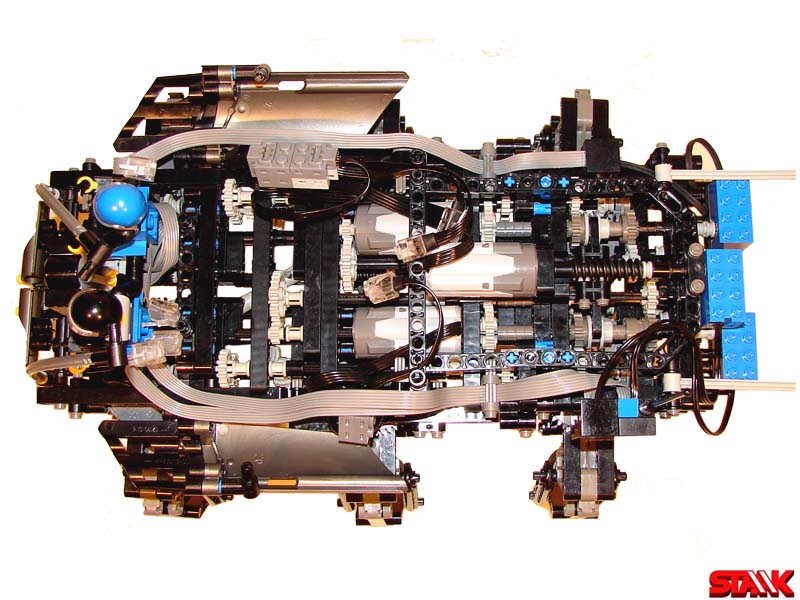
Mechanika.
Nogi Hexa połączone są mechanicznie w układzie: 2skrajne z jednej strony + 1 środkowa po drugiej stronie(2 układy po 3 nogi). Dla napędu każdego z układu przewidziany jest osobny silnik (odpowiednio A i C).
Trzeci silnik podłączony do portu B odpowiada za przesterowanie mechanizmu ("skrzyni biegów" opartej na 2x Driving Ring 6539) odpowiedzialnego za dołączanie "mocy" z danego silnika do napędu góra dół lub przód tył jego "układu kroczącego".Przełączanie odbioru odbywa się jednocześnie dla obydwu układów.
Oprogramowanie.
Program Hexa napisany został w NXT-G (i chyba nigdy więcej tego błędu nie popełnię).
W skład oprogramowania wchodzą:
- program do sterowania robotem w trybie manualnym, czyli za pośrednictwem pilota i wieży PF możliwe jest niezależne sterowanie wszystkimi (3) silnikami (niezależnie, acz pojedynczo).
Program ten był naprawdę bardzo przydatny podczas "nauki chodzenia" Hexa.
- program główny. Program ten odpowiada za ruch: do przodu, do tyłu, skręt w lewo i skręt w prawo w trybie automatycznym. Za pośrednictwem pilota PF robot otrzymuje jedną z komend (czerwony kanał przód tył, niebieski kanał skręt lewo prawo) a następnie NXT wykonuje zaprogramowaną dla danego ruchu sekwencję . Każdy krok zaczyna się i kończy w "pozycji wyjściowej".
Film...
[youtube]http://www.youtube.com/watch?v=XO5IqUIQpKQ[/youtube]
i galeria: http://www.brickshelf.com/cgi-bin/gallery.cgi?f=481049





Dziękuję za uwagę.
Dane ogólne.
Wymiary:
Szerokość
Nadwozia: 16s
Części kroczącej: 28s
Długość: 42s
Wysokość: 27s (w pozycji nominalnej)
Waga: 1,3 kg (bez antenki)
Osprzęt elektryczny:
1x NXT
1x PF IR Receiver 8884 (zmodyfikowany do współpracy z NXT)
1x PF Pilot IR 8885
3x PF Medium Motor 8883
3x Rotation Sensor 9756
Mechanika.
Nogi Hexa połączone są mechanicznie w układzie: 2skrajne z jednej strony + 1 środkowa po drugiej stronie(2 układy po 3 nogi). Dla napędu każdego z układu przewidziany jest osobny silnik (odpowiednio A i C).
Trzeci silnik podłączony do portu B odpowiada za przesterowanie mechanizmu ("skrzyni biegów" opartej na 2x Driving Ring 6539) odpowiedzialnego za dołączanie "mocy" z danego silnika do napędu góra dół lub przód tył jego "układu kroczącego".Przełączanie odbioru odbywa się jednocześnie dla obydwu układów.
Oprogramowanie.
Program Hexa napisany został w NXT-G (i chyba nigdy więcej tego błędu nie popełnię).
W skład oprogramowania wchodzą:
- program do sterowania robotem w trybie manualnym, czyli za pośrednictwem pilota i wieży PF możliwe jest niezależne sterowanie wszystkimi (3) silnikami (niezależnie, acz pojedynczo).
Program ten był naprawdę bardzo przydatny podczas "nauki chodzenia" Hexa.
- program główny. Program ten odpowiada za ruch: do przodu, do tyłu, skręt w lewo i skręt w prawo w trybie automatycznym. Za pośrednictwem pilota PF robot otrzymuje jedną z komend (czerwony kanał przód tył, niebieski kanał skręt lewo prawo) a następnie NXT wykonuje zaprogramowaną dla danego ruchu sekwencję . Każdy krok zaczyna się i kończy w "pozycji wyjściowej".
Film...
[youtube]http://www.youtube.com/watch?v=XO5IqUIQpKQ[/youtube]
i galeria: http://www.brickshelf.com/cgi-bin/gallery.cgi?f=481049


Dziękuję za uwagę.