[MOC] Ciągnik przegubowy 4x4
: 2011-08-28, 21:06
Ponieważ za oknem szaleje Irenka (na sile trochę opadła ale mimo to powaliła sąsiadowi drzewo) to z konieczności siedzę w domu co zmotywowało mnie by skończyć ten MOC.

Jest to kolejne niewielkie jeździdzełko. Rodzaj ciągnika przegubowego, coś co od dawna chciałem zbudować. Pierwszy prototyp był podobnych rozmiarów i miał w osiach dyferencjały ze zdalnymi blokadami i jeden silnik napędowy PF M. I tu trafiłem na pierwszą przeszkodę bo zapomniałem, że w tej skali nie da się właściwie przełożyć dwóch wałów (napędowy i do obsługi blokad dyfrów) przez przegub.
Drugi prototyp miał zatem dwa silniki napędowe i tylko jeden wał (do blokad dyfrów) przez całą długość pojazdu. Pojawił się jednak problem nr 2 czyli zupełny brak miejsca na siłownik i silnik do skręcania ramy.

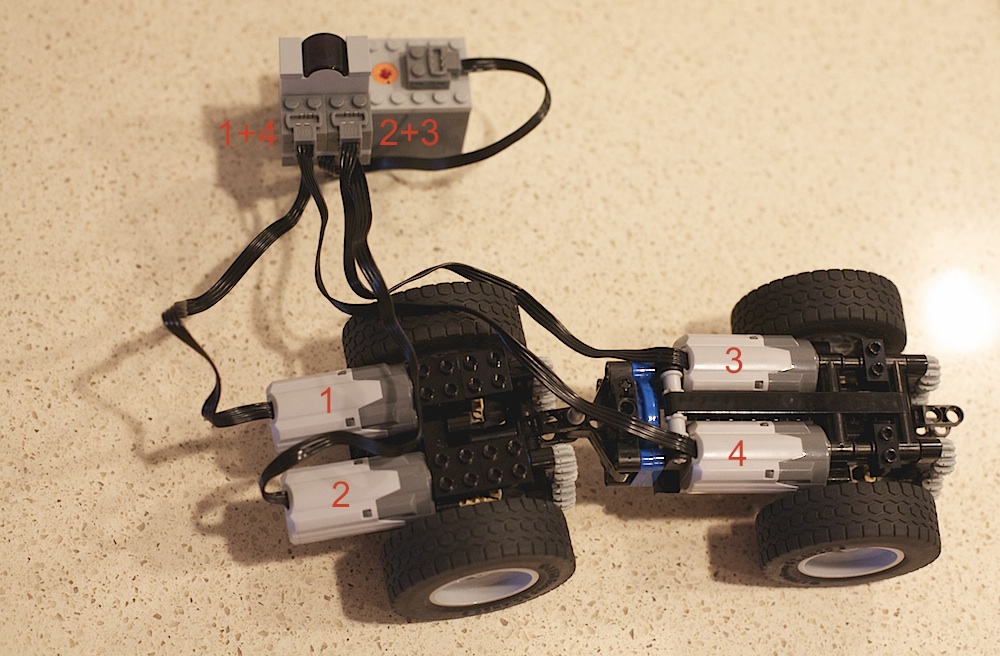
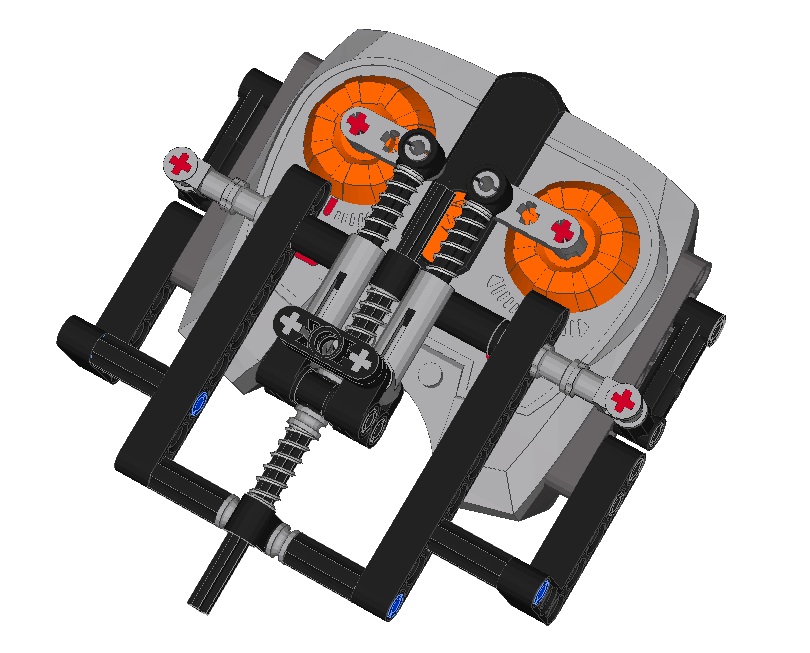
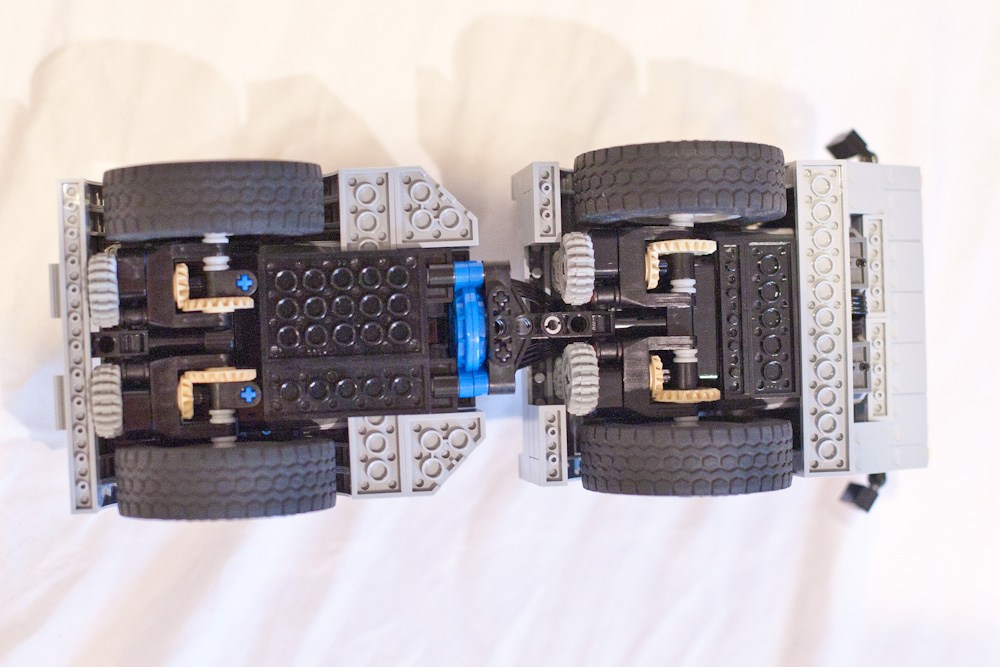
I tak doszedłem do obecnego rozwiązania. Pojazd ma aż 4 silniki napędowe, po jednym na każde koło (z niewielką redukcją). Obie sekcje, przednia i tylna połączone są tylko pinem przegubu. Nie ma tu żadnych siłowników do skręcania, zbędnych przekładni, zębatek, itp. Dyferencjałow też nie ma bo po co. (Dodatkowy łącznik 6L na górze przegubu utrzymuje obie sekcje w poziomie ze względu na luzy w zastosowanej małej obrotnicy).
Silniki są podłączone do wieży IR na przemian. Czyli silnik prawego przedniego koła z silnikiem lewego tylnego, itd. Skręcanie odbywa się przez spowolnienie obrotów jednej z par silników. Niestety pilot z regulacją prędkości się tutaj nie sprawdził. Jego sterowanie jest nieprecyzyjne bo nie można łatwo wyzerować prędkości obu par silników (ustawić ich na tę samą wartość). Do sterowania użyłem więc NXT.

Sterownikiem jest kostka NXT z dwoma czujnikami nacisku (jako przyciski skrętu prawo/lewo) i IR Link, który komunikuje się z wieżą IR w pojeździe. Prosty program steruje pojazdem w sposób podobny jak w czołgu: gdy oba przyciski są wciśnięte pojazd jedzie prosto, gdy puścimy jeden z nich, zaczyna skręcać (Silniki jednej z par obracają się wolniej). Gdy zwolnimy oba przyciski pojazd się zatrzyma. Niestety w tym uproszczonym programie nie ma w tej chwili biegu wstecznego.
Rozwiązanie to ma szereg zalet:
+ spora moc ze względu na dużą ilość silników
+ minimalna ilość zębatek (właściwie można zbudować taki większy pojazd z kołami osadzonymi bezpośrednio na czterech PF XL, czyli powstałby samochód 4x4 bez nawet jednej zębatki)
+ brak dyfrów = brak problemów
+ duża prostota konstrukcji podwozia
Są też wady:
- skomplikowane sterowanie (odpadaja piloty PF IR, NXT+IR jest w miarę ok, najlepiej pewnie sprawdziłby sie NXT+bluetooth)
- brak stabilności między obiema sekcjami podwozia, które są połączone tylko przegubem (choć nie wiem czy to aż taka wielka wada)
Galeria
Film
Fotki: 1 2 3 4 5 6 7 8 9 10 11
Program
Jest to kolejne niewielkie jeździdzełko. Rodzaj ciągnika przegubowego, coś co od dawna chciałem zbudować. Pierwszy prototyp był podobnych rozmiarów i miał w osiach dyferencjały ze zdalnymi blokadami i jeden silnik napędowy PF M. I tu trafiłem na pierwszą przeszkodę bo zapomniałem, że w tej skali nie da się właściwie przełożyć dwóch wałów (napędowy i do obsługi blokad dyfrów) przez przegub.
Drugi prototyp miał zatem dwa silniki napędowe i tylko jeden wał (do blokad dyfrów) przez całą długość pojazdu. Pojawił się jednak problem nr 2 czyli zupełny brak miejsca na siłownik i silnik do skręcania ramy.
I tak doszedłem do obecnego rozwiązania. Pojazd ma aż 4 silniki napędowe, po jednym na każde koło (z niewielką redukcją). Obie sekcje, przednia i tylna połączone są tylko pinem przegubu. Nie ma tu żadnych siłowników do skręcania, zbędnych przekładni, zębatek, itp. Dyferencjałow też nie ma bo po co. (Dodatkowy łącznik 6L na górze przegubu utrzymuje obie sekcje w poziomie ze względu na luzy w zastosowanej małej obrotnicy).
Silniki są podłączone do wieży IR na przemian. Czyli silnik prawego przedniego koła z silnikiem lewego tylnego, itd. Skręcanie odbywa się przez spowolnienie obrotów jednej z par silników. Niestety pilot z regulacją prędkości się tutaj nie sprawdził. Jego sterowanie jest nieprecyzyjne bo nie można łatwo wyzerować prędkości obu par silników (ustawić ich na tę samą wartość). Do sterowania użyłem więc NXT.
Sterownikiem jest kostka NXT z dwoma czujnikami nacisku (jako przyciski skrętu prawo/lewo) i IR Link, który komunikuje się z wieżą IR w pojeździe. Prosty program steruje pojazdem w sposób podobny jak w czołgu: gdy oba przyciski są wciśnięte pojazd jedzie prosto, gdy puścimy jeden z nich, zaczyna skręcać (Silniki jednej z par obracają się wolniej). Gdy zwolnimy oba przyciski pojazd się zatrzyma. Niestety w tym uproszczonym programie nie ma w tej chwili biegu wstecznego.
Rozwiązanie to ma szereg zalet:
+ spora moc ze względu na dużą ilość silników
+ minimalna ilość zębatek (właściwie można zbudować taki większy pojazd z kołami osadzonymi bezpośrednio na czterech PF XL, czyli powstałby samochód 4x4 bez nawet jednej zębatki)
+ brak dyfrów = brak problemów
+ duża prostota konstrukcji podwozia
Są też wady:
- skomplikowane sterowanie (odpadaja piloty PF IR, NXT+IR jest w miarę ok, najlepiej pewnie sprawdziłby sie NXT+bluetooth)
- brak stabilności między obiema sekcjami podwozia, które są połączone tylko przegubem (choć nie wiem czy to aż taka wielka wada)
Galeria
Film
Fotki: 1 2 3 4 5 6 7 8 9 10 11
Program