[MOC] Peugeot 908 HDi FAP
: 2013-05-31, 21:33

Dane techniczne:
Wymiary: dł. 61s / szer. 29s / wys. 18s (nie licząc anten)
Waga: 1.73 kg
Zawieszenie: pełne niezależne
Napęd: na tylną oś, bezpośrednio, czterema silnikami RC
Silniki: 4 x RC
Prędkość maksymalna: 15.3 km/h
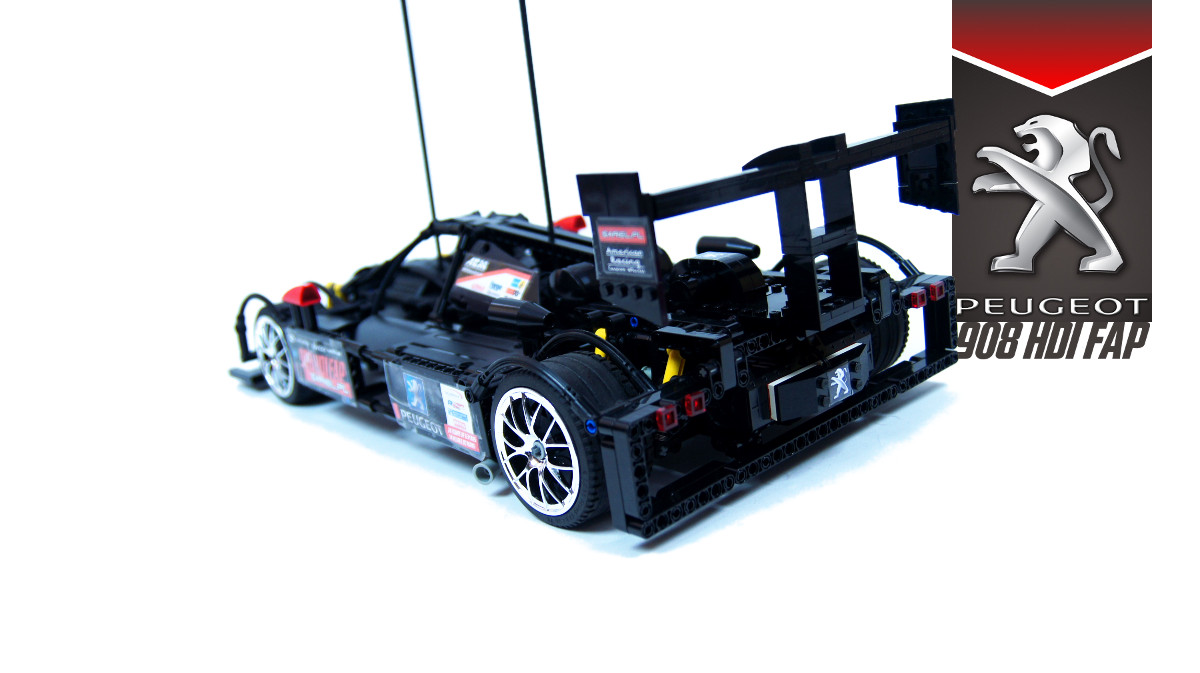
Peugeot 908 HDi FAP to współczesny samochód do 24-godzinnych rajdów Le Mans. W rajdach tego typu ogromnie ważna jest ekonomia jazdy, do której dąży się minimalizując opór aerodynamiczny i obniżając środek ciężkości samochodów. Dlatego udział w Le Mans biorą samochody o bardzo charakterystycznym wyglądzie prostokątnych naleśników, które z pewnością widzieliście w wielu modelach i odmianach. Ten konkretny wybrałem, ponieważ jest to jeden z pierwszych od kilku lat modeli z zabudowaną kabiną - wcześniej panował trend otwartych kabin dla niższego środka ciężkości, inżynierowie Peugeota stwierdzili natomiast że zabudowana kabina ma lepszą aerodynamikę, wartą podwyższenia tegoż środka. Zbudowanie takiego samochodu w zgodzie z bardzo restrykcyjnymi przepisami, regulującymi m.in. maksymalną wielkość drzwi, wymagało dużego kombinowania, dlatego drzwi składają się z dwóch połówek otwieranych pod różnymi kątami. Ale chyba warto było, bo 908 wygrał 19 z 28 rajdów w których startował w latach 2007-2010.
Jeśli chodzi o model, to po mojej zeszłorocznej Zondzie szukałem samochodu który pozwoli podejść do budowy czegoś bardzo szybkiego nieco inaczej. 908 okazał się idealny, bo jego długa sylwetka pozwoliła zmieścić między osiami 2 moduły RC ustawione gęsiego, a niski profil gwarantował stabilność. Podstawą do budowy było porzucenie kół z Zondy na rzecz tych z 8070, o średnicy mniejszej tylko o studa, ale lżejszych w sumie o całe 200 gramów. Do tego Auri ślicznie pochromował Legowe kołpaki, praktycznie identyczne z oryginalnymi.

Model jest ciasno obudowany wokół "rdzenia" złożonego ze wspomnianych dwóch modułów RC oraz 4 silników RC pośrodku tylnej osi, ustawionych tak żeby ich szybsze wyjście znajdowało się w jednej linii. Zabrakło miejsca na dyferencjał czy jakiekolwiek zębatki, a jako że według wcześniejszych doświadczeń brak dyfra przu dużych prędkościach owocował samoistnym kręceniem bączków, to podzieliłem tylną oś na pół. W rezultacie każde koło napędzają dwa silniki niezależne od pozostałych dwóch, co pozwala obciążeniom na obu kołach rozkładać się nierównomiernie, i w jakiś tam nieznaczny sposób niweluje brak dyfra.
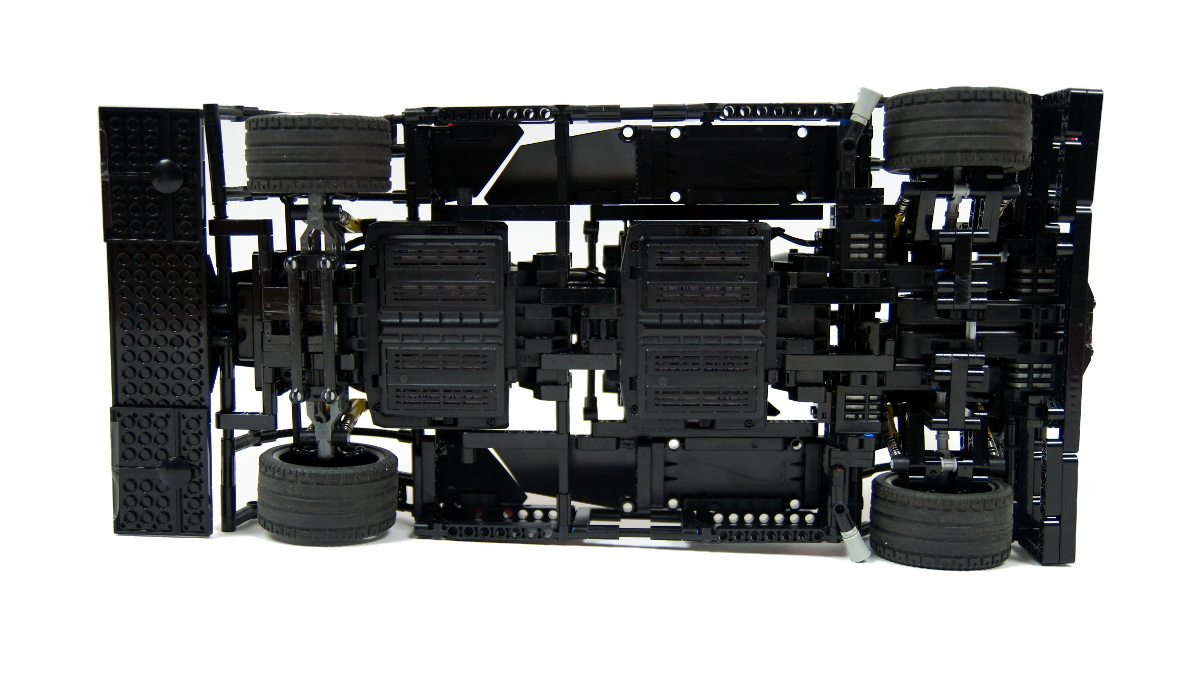
Obie osie są zawieszone niezależnie, z każdym kołem w sumie na 2 twardych amorach. W obu osiach chciałem wypróbować zwrotnice z 42000, ale na tył okazały się za szerokie a na przód za wysokie. Całe zawieszenie jest bardzo twarde, z niewielkim skokiem - wcześniejsze doświadczenia pokazały, że przy dużych prędkościach byle kamyk potrafi dobić miękkie zawieszenie. Przednia oś wykorzystuje wyjście z przedniego modułu RC do skrętu z centrowaniem. Tylna oś zawiera z sumie 4 kardany, o które mocno się bałem, planując nawet osobny silnik do hamowania przed podniesienie tylnych kół. Na szczęście okazało się, że małe koła i lekkość modelu pozwalają hamować silnikiem bez mielenia kardanów. Co nie zmienia faktu że zmieliłem ich coś z dziesięć podczas driftingu, jak i wypadając poza asfalt.
Nadwozie budowałem początkowo łącząc panele i klocki systemowe żeby zabudować je bez dziur i oddać wszystkie detale. Niestety, rosnąca waga takiego rozwiązania zmusiła mnie do opcji light, z symboliczną budą z paneli, liftów i giętkich osi. Tak zbudowany model nie jest piękny, ale też nie jest całkiem dziurawy jak Zonda.
Model wyszedł ćwierć kilo lżejszy i sporo mniejszy od Zondy, i jeździł bardzo obiecująco, ale okazał się niestety o włos wolniejszy od niej - 15.3 km/h w porównaniu do 15.41 km/h Zondy (mierzone trzykrotnie GPSem z widokiem na 11 satelitów na odcinku 200 metrów). W tej skali jest to odpowiednik ok. 132 km/h w prawdziwym samochodzie, czyli skromnie. Dla mnie to spore rozczarowanie, bo liczyłem że kombinacja mniejsza masa + mniejsze koła + szybsze wyjście silników RC + uproszczenie przeniesienia napędu do maksimum da lepszy wynik. Poza prędkością raczej nie ma zarzutów - model ma świetną przyczepność mimo braku dyfra i błyskawicznie reaguje na skręt, choć autocentrowanie wprowadza pewną nerwowość w korygowaniu kursu. Lepiej jeździło mi się Zondą, gdzie korekty skrętu były bardziej precyzyjne. Twarde zawieszenie i małe koła z cienkimi oponami wprowadzają też dużo wibracji, na tyle że spojler odpadał co jakiś czas nawet przy jeżdżeniu po asfalcie. Co ciekawe - model, choć bardzo płaski i z szeroko rozstawionymi kołami, okazał się na tyle czuły na wyważenie, że trochę znosił na stronę po której miał zamontowaną kamerę, choć ważyła ona poniżej 100 gram.
To będzie prawdopodobnie mój ostatni bardzo szybki MOC, bo budowa takich modeli niesie masę problemów. Są one praktycznie bezużyteczne poza miejscami z dużą ilością asfaltu, a jeżdżenie na zewnątrz jest trudne organizacyjnie (np. pogoda), nie mówiąc o uszkodzeniamiach i gubieniu części. 908 generalnie mnie rozczarował - liczyłem że będzie albo szybki albo przynajmniej ładny, nie wyszło ani jedno ani drugie. Ale chociaż bączki kręci przyzwoicie.
Galeria
Fotki:







I film:
[youtube]http://www.youtube.com/watch?v=2YLfo0K5-F0[/youtube]