[MOC] Sennebogen 643M - mobilny dźwig teleskopowy
: 2014-12-22, 15:12
Czas najwyższy pochwalić się swoim najmłodszym dzieckiem:
SENNEBOGEN 643 Mobile Telescopic Crane

DANE TECHNICZNE:
- 2 x PF XL motor
- 3 x PF L motor
- 6 x PF M motor
- 4 x IR receiver
- 1 x PF 6xAA Battery Box
- 1 x PF 6xAAA Battery Box
- skala: 1:14
- waga: 4220 g
- wysokość z maksymalnie podniesionym i wysuniętym wysięgnikiem: 150 cm
- wysięgnik 4-sekcyjny
- rozstaw łap przy rozłożonych podporach: 40 x 43 cm
- napęd na wszystkie koła, wszystkie koła skrętne
- uchylna kabina
- model w pełni zdalnie sterowany
GENEZA POWSTANIA
Jeśli ktoś śledzi moje poczynania, to wie, że upodobałem sobie odtwarzanie wszelkiej maści maszyn produkcji Sennebogen z locków lego.
W swoim dorobku mam już podobne maszyny do prezentowanego modelu jak [URL=http://www.00453005_0000002.pl/forum/viewtopic.php?t=16213]Sennebogen 680 HMC (Harbour Mobile Crane)[/URL] i Sennebogen 683 HD - gąsienicowy żuraw teleskopowy.
Pierwszy z nich jest mobilny, ale linowy, drugi z nich teleskopowy, ale gąsienicowy.
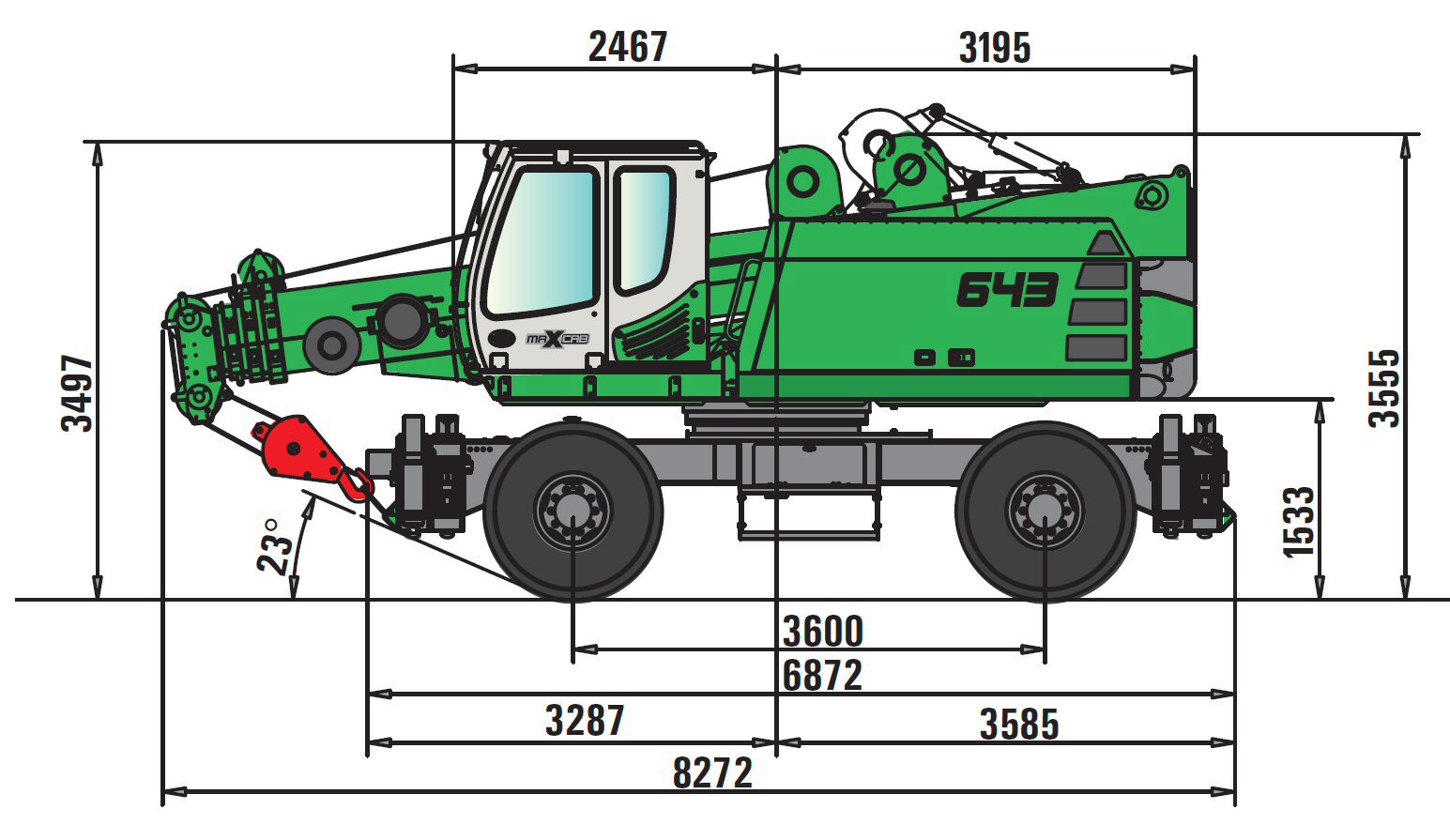
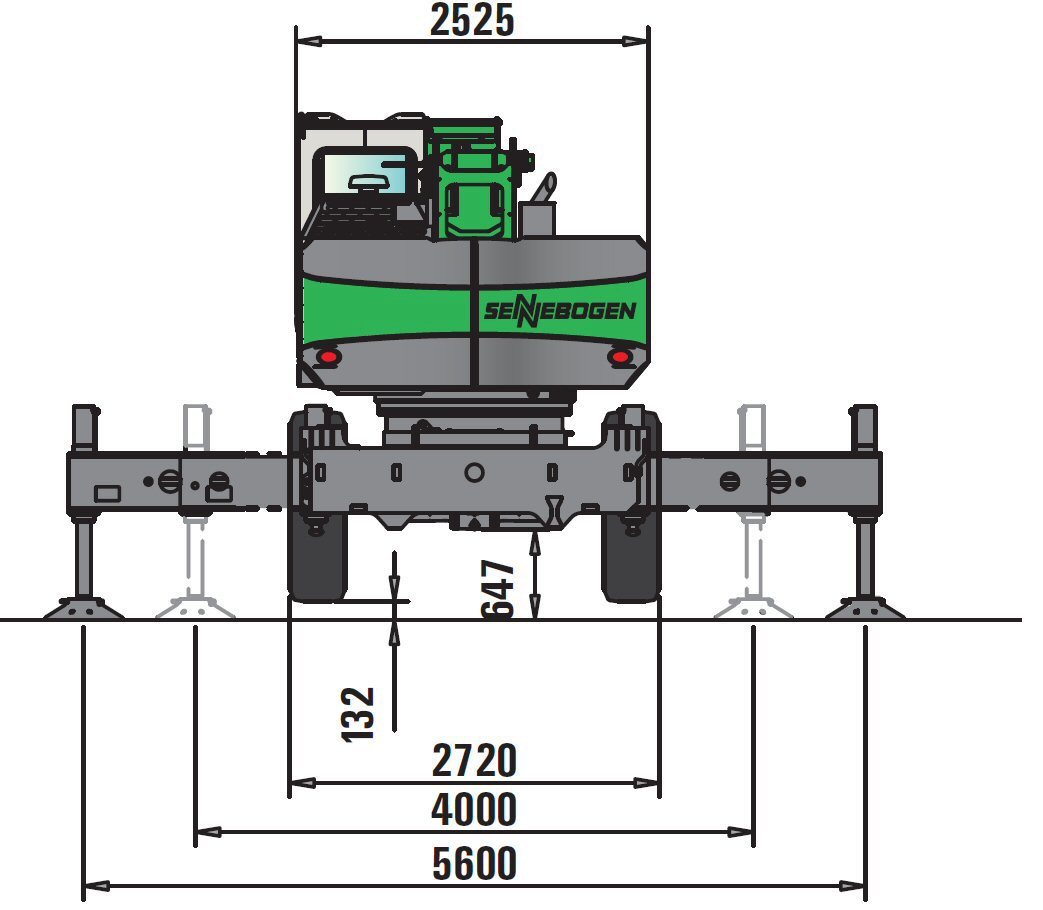
Moim zamysłem było zbudowanie kołowego dźwigu, z podporami rozkładanymi teleskopowo oraz z teleskopowym, 4-sekcyjnym wysięgnikiem, wybór padł na model 643M:







Budowę rozpocząłem w maju tego roku, zakończyłem zaś w grudniu, więc po kolei:
UWAGA MALKONTENCI: budowałem długo, więc opis też jest długi! :)
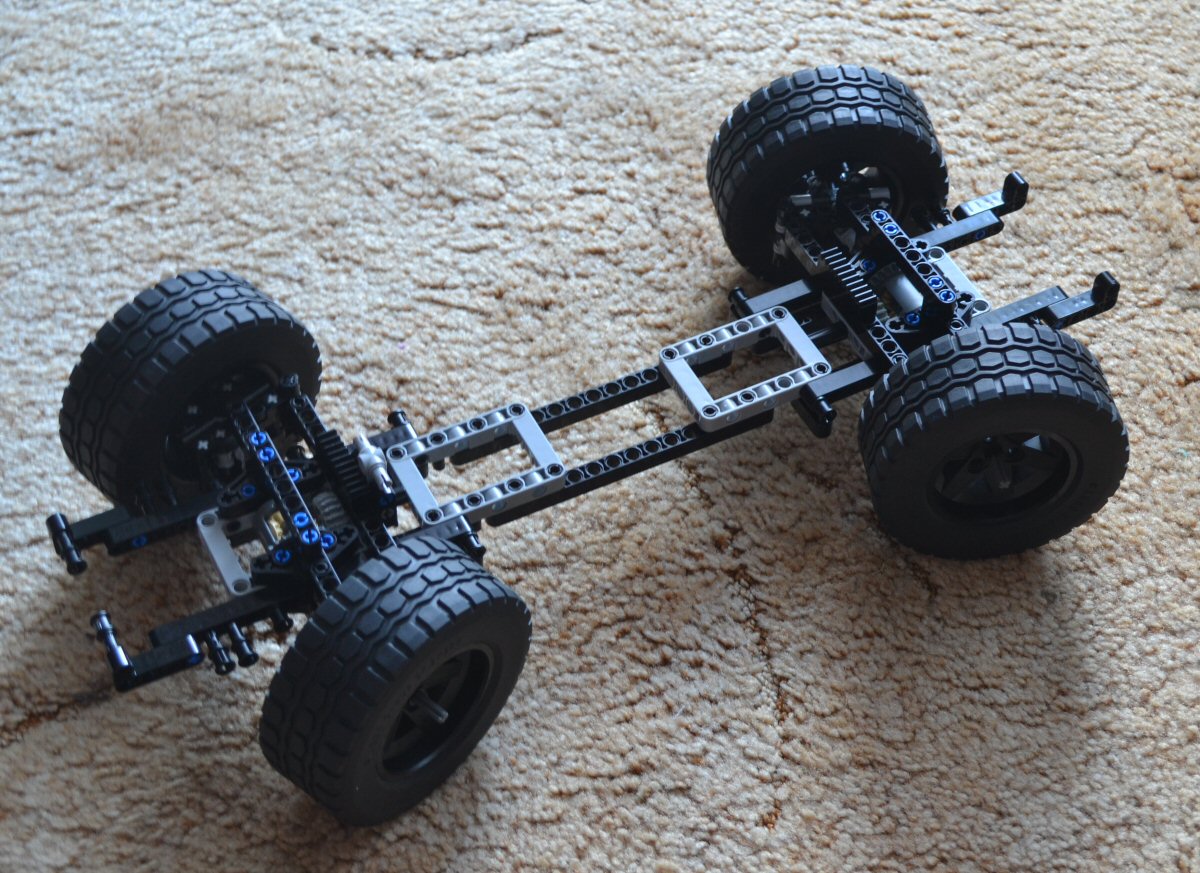
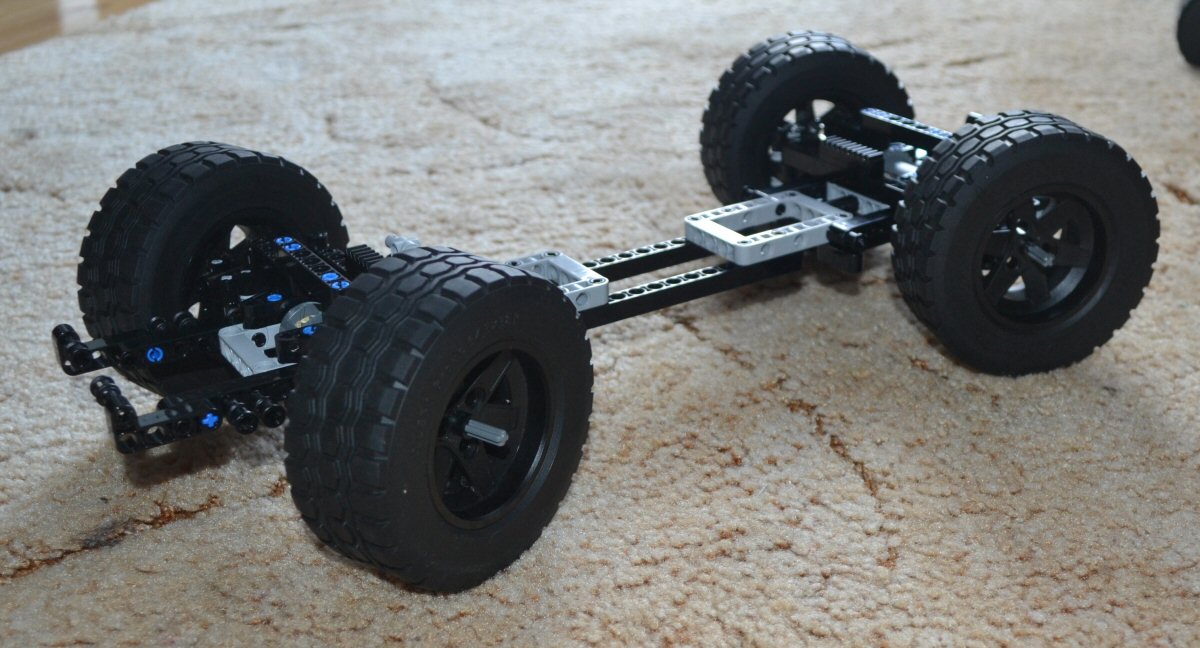
Model zacząłem skalować wg kół 94.3x38 z Unimoga, w ten sposób powstały obie osie, zamocowane na prowizorycznej ramie:




Obie osie są swoimi lustrzanymi odbiciami, obie osie są osiami jezdnymi i skrętnymi.
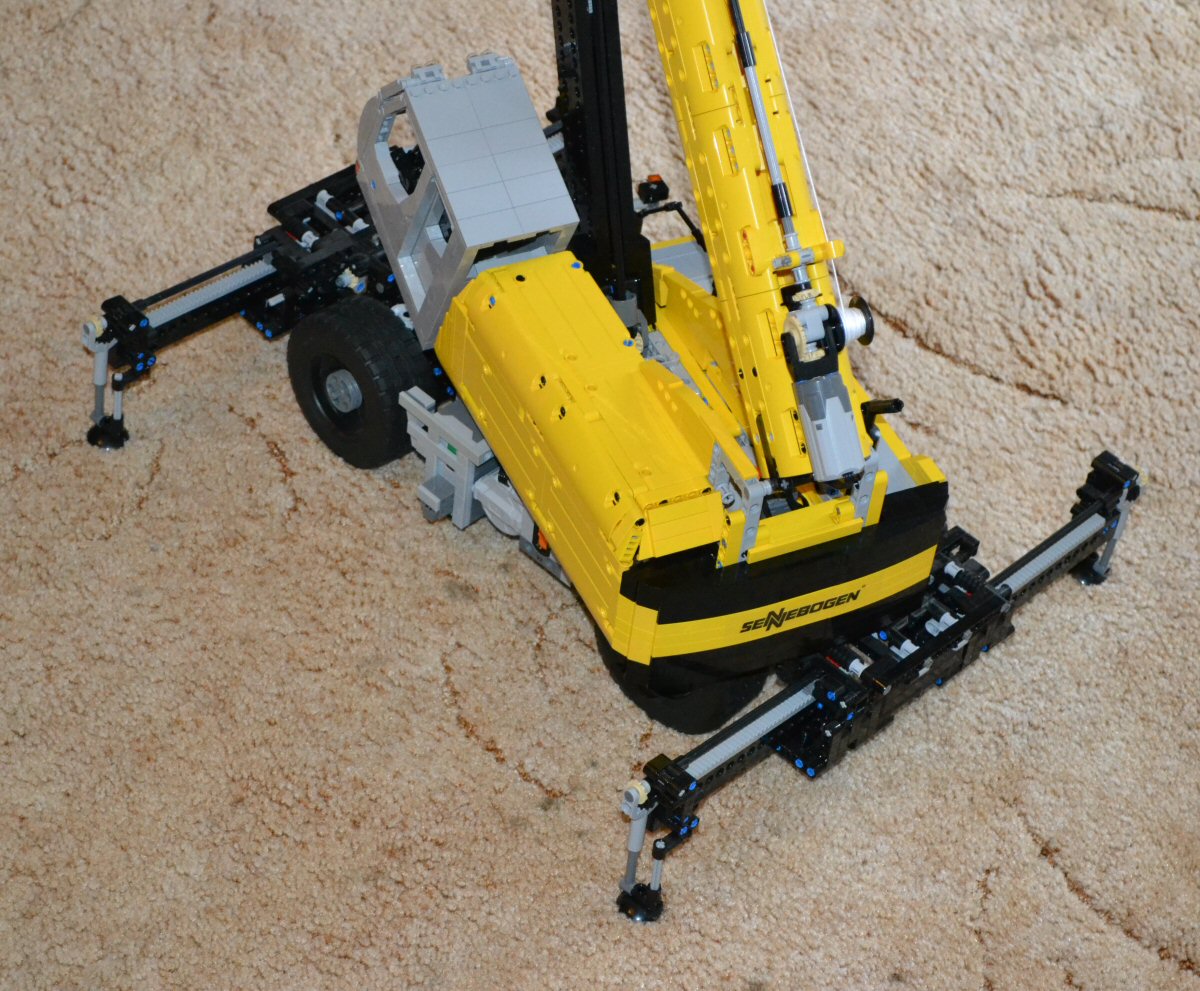
Kolejna rzecz, która powstała to moduły z podporami.




Budowa modułów z podporami była w miarę nieskomplikowana dzięki czerwonym zębatkom z8 without friction, które miały swoją premierę w modelu 42009. Każda z podpór wysuwa się na długość 12 studów. Za opuszczanie podpór odpowiadają małe siłowniki śrubowe. Niestety obie funkcje działają dość ślamazarnie, ponieważ do ich obsługi służą przełożenia ze ślimaka na z8.
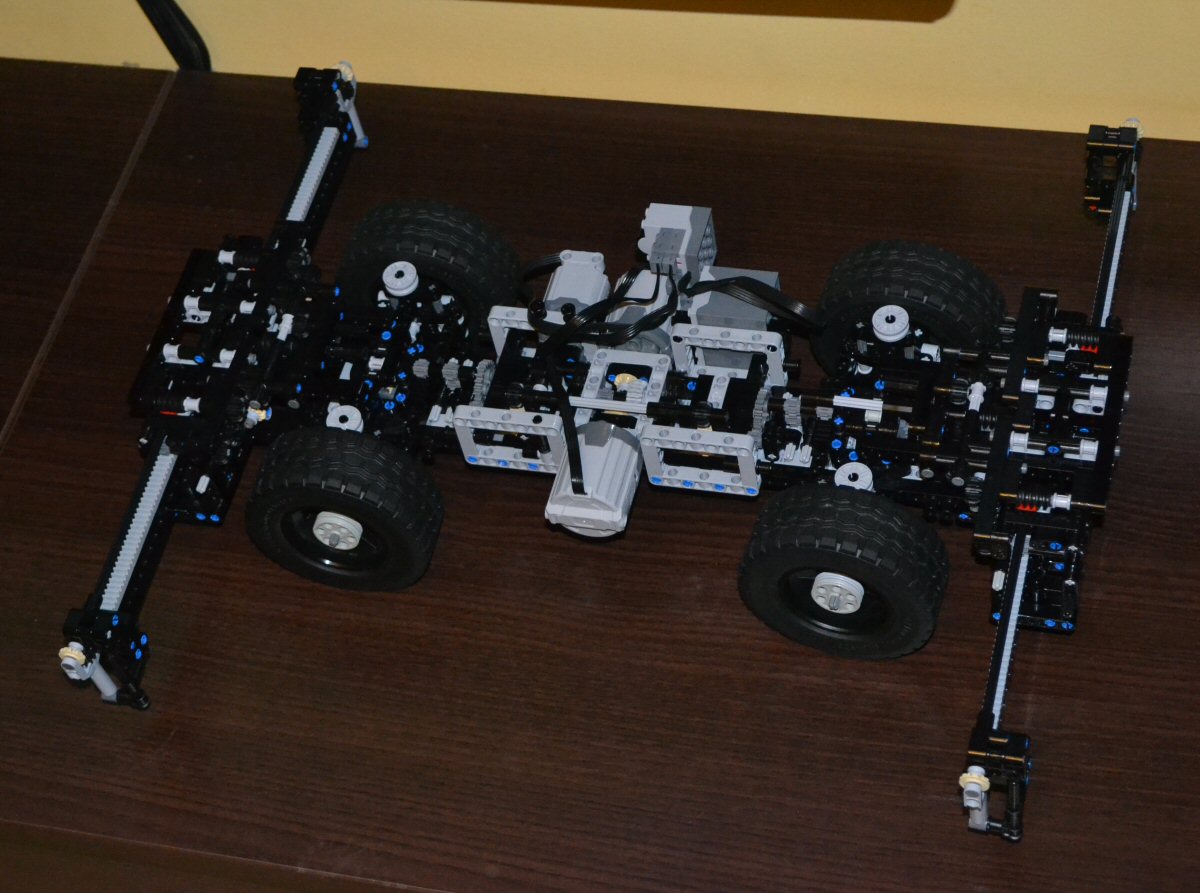
Gotowe moduły z podporami trafiły na ramę podwozia:


Następnie należało wypełnić przestrzeń między modułami i osiami.
W pierwszej kolejności zamontowałem napęd oraz mechanizm skrętu, pierwotnie wyglądało to tak:


i w tym momencie zaczęły się schody, bo przy takim ustawieniu silników nie ma mowy o dołożeniu kolejnych silników do rozkładania i opuszczania podpór.
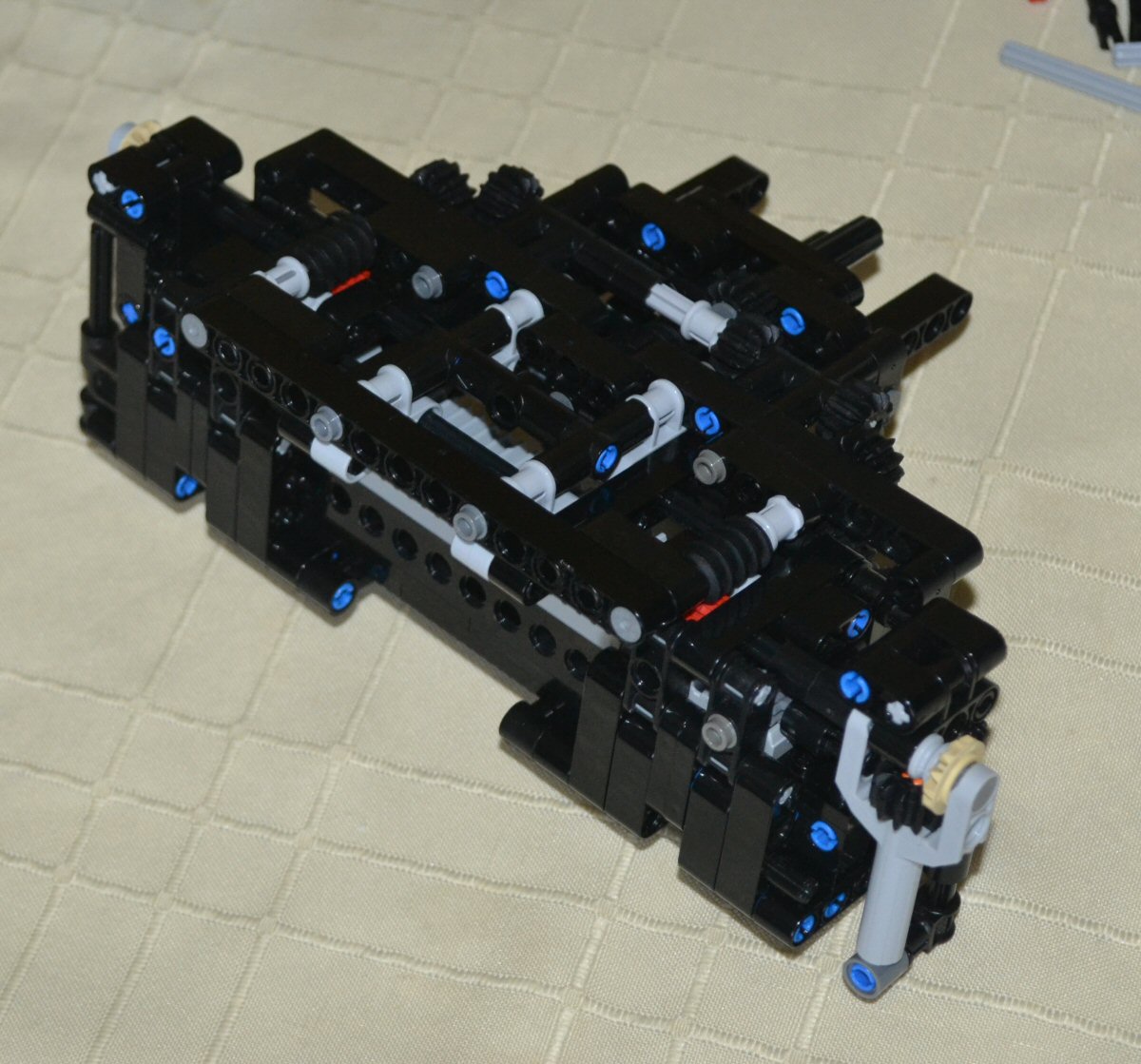
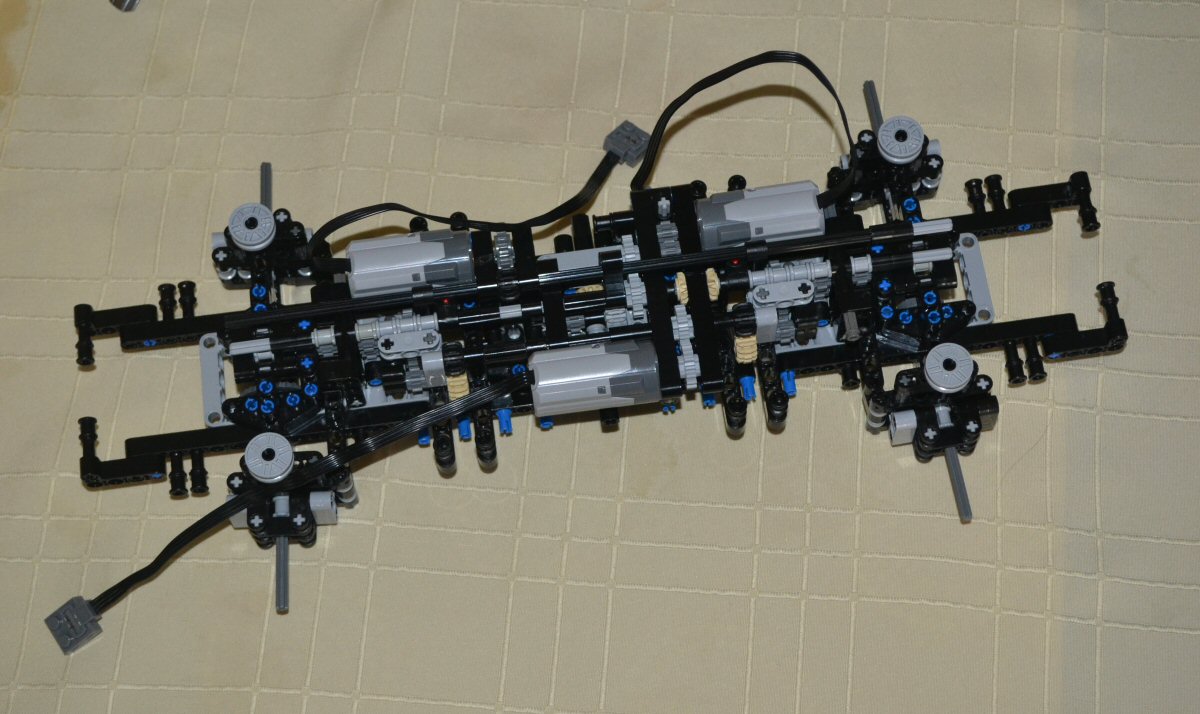
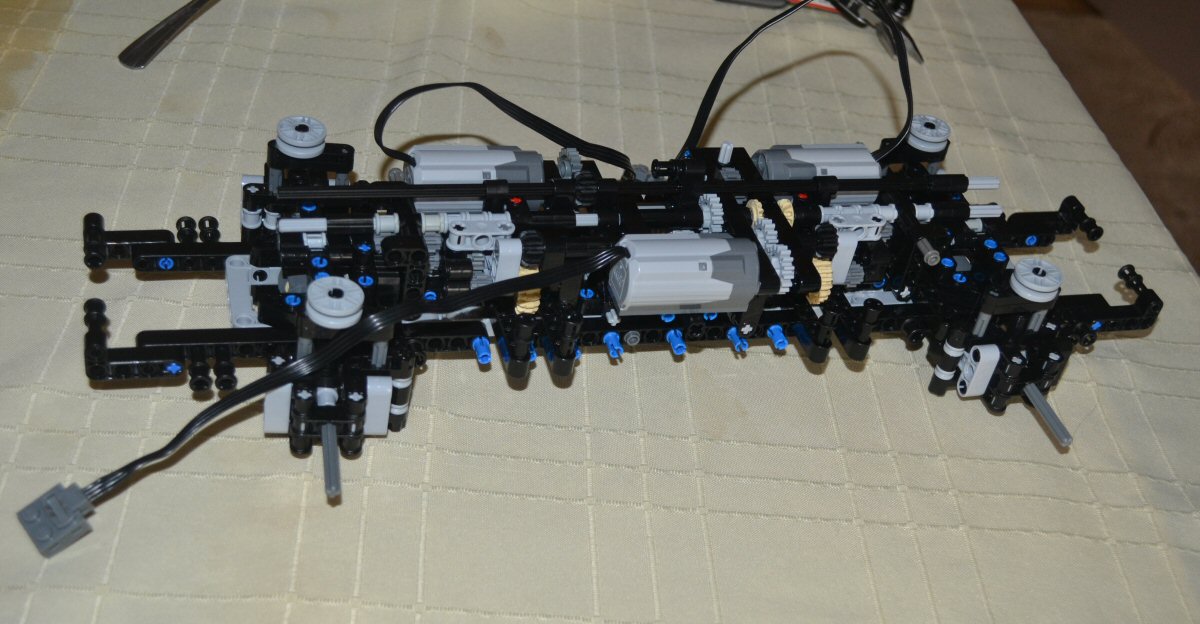
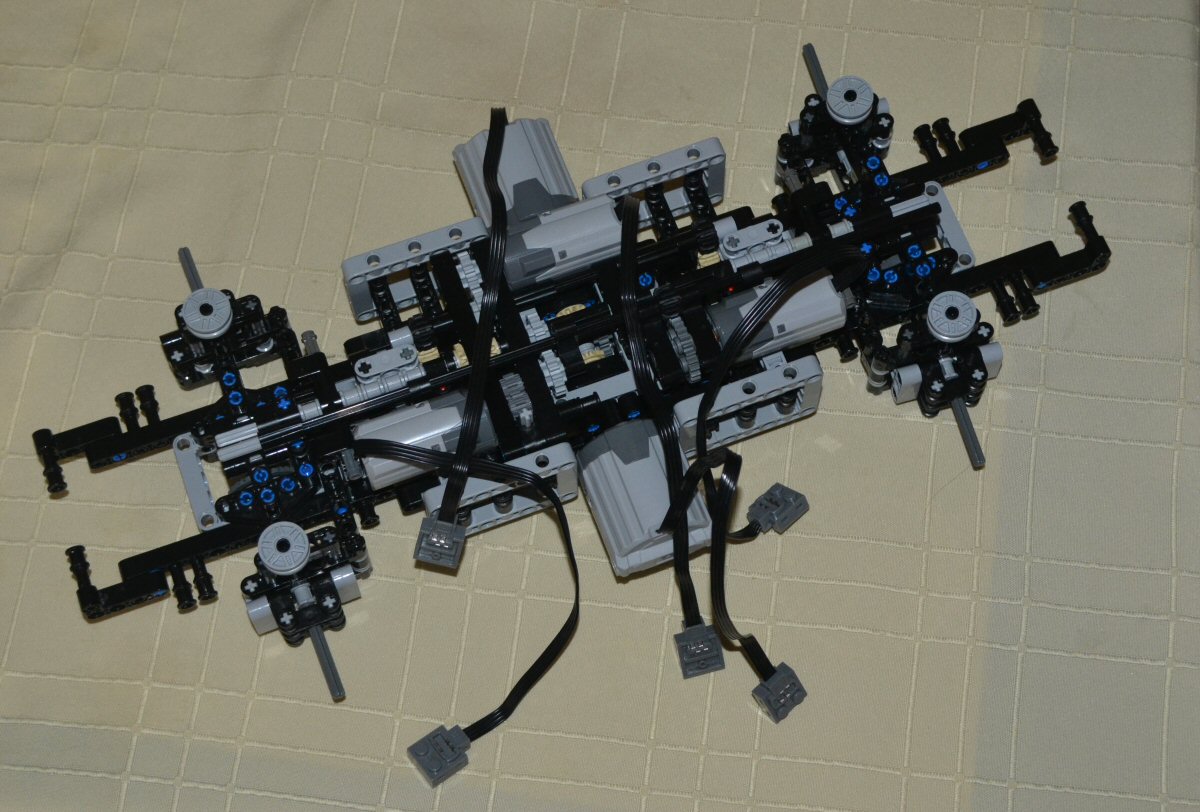
Dlatego podwozie zostało przebudowane, wszystkie silniki poza tymi do napędu zostały umieszczone równolegle do linii podwozia:





Tu największym problemem był fakt, że przez całe podwozie musiały być przepuszczone 4 napędy: jazda, skręt, wysuwanie i opuszczanie podpór, dodatkowo przód i tył musiał być ze sobą sprzężony.
Ostatecznie w podwoziu zrobiło się naprawdę ciasno, ilość zębatek rosła w tempie wykładniczym :) ale udało sie osiagnąć cel i ostatecznie mamy:
- 2 x silnik XL odpowiadają za jazdę (przełożenie 1:7)
- 1 x silnik M do skrętu (bez sprzęgła)
- 1 x silnik M do wysuwania podpór
- 1 x silnik M do opuszczania podpór
Dodatkowo na podwoziu zamontowane są 2 odbiorniki podczerwieni i mały battery box.
Podwozie udało się ukończyć na koniec maja



Po zakończeniu podwozia przyszedł czas na budowę elementów nadwozia.
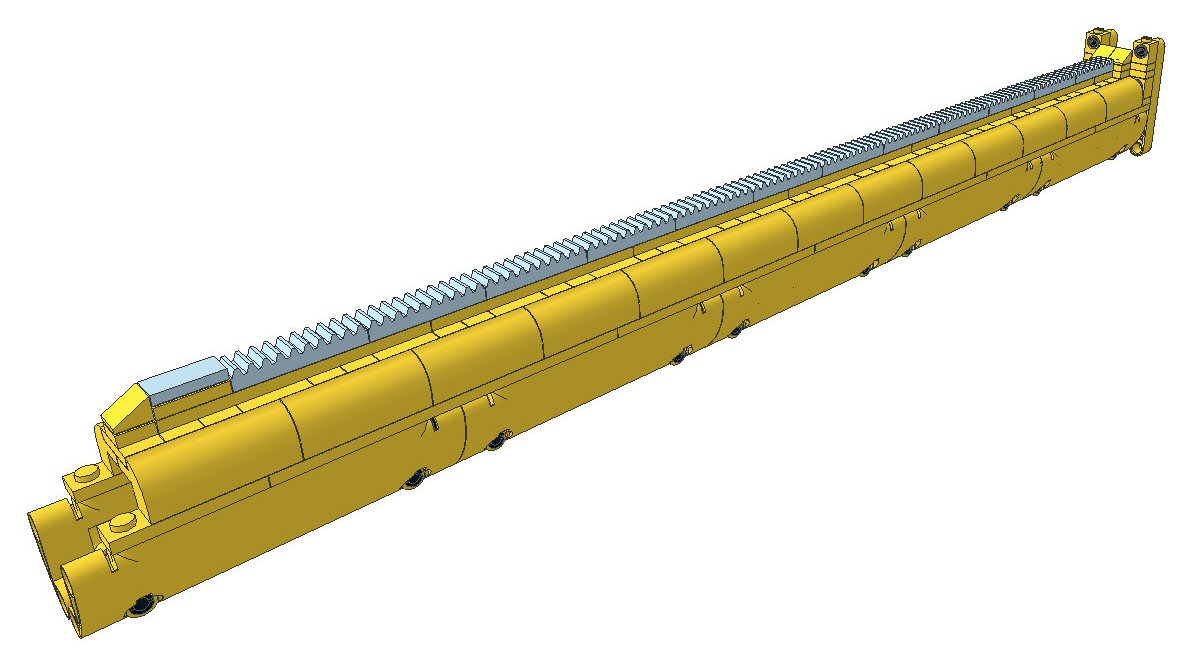
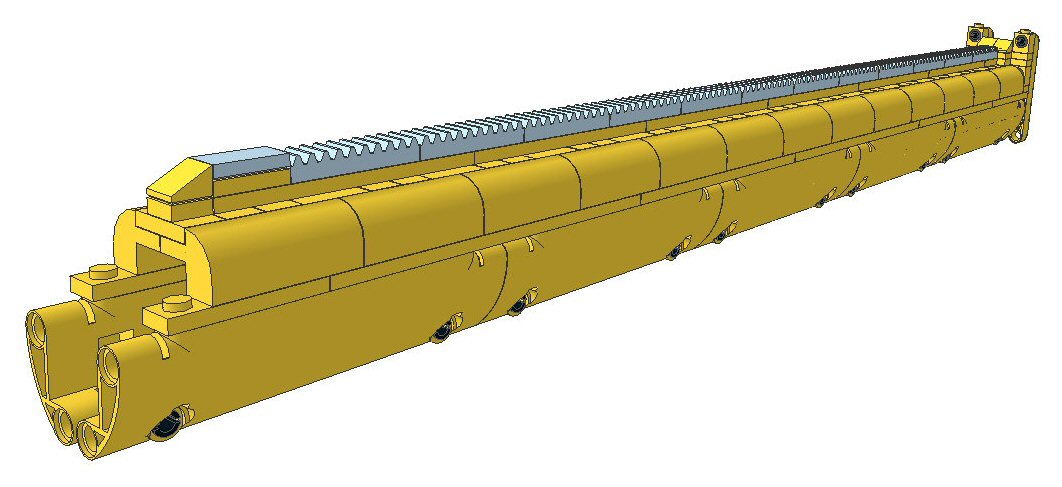
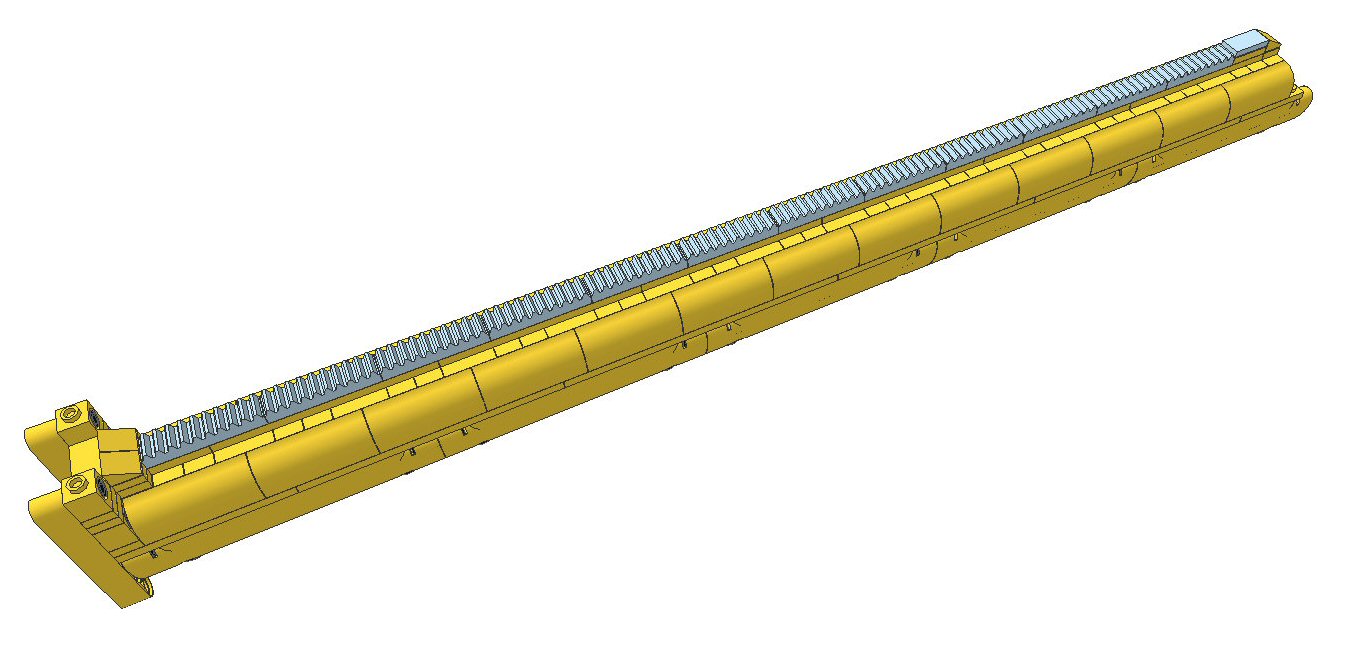
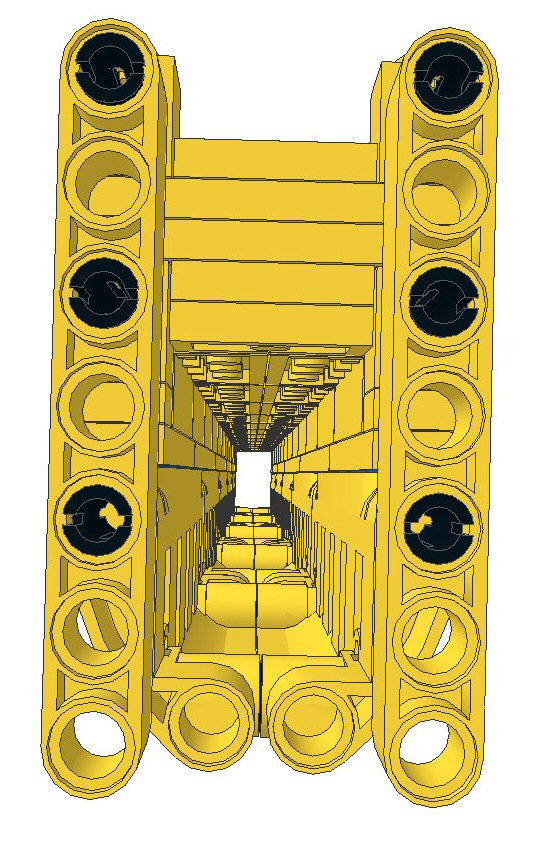
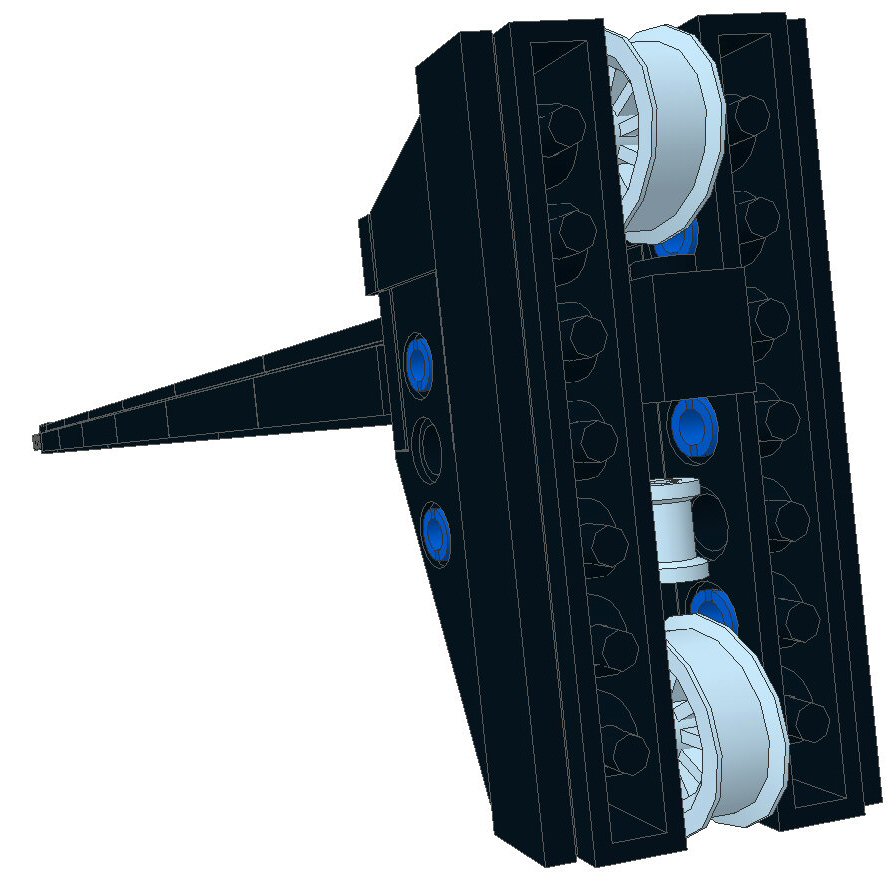
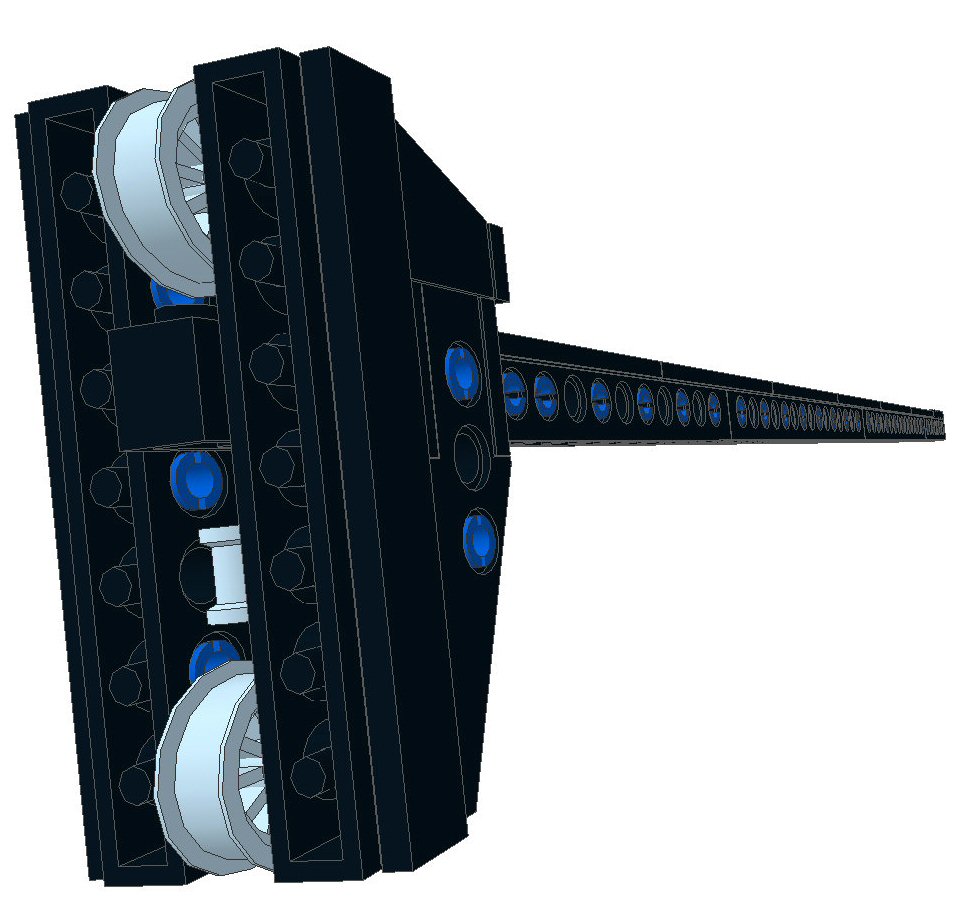
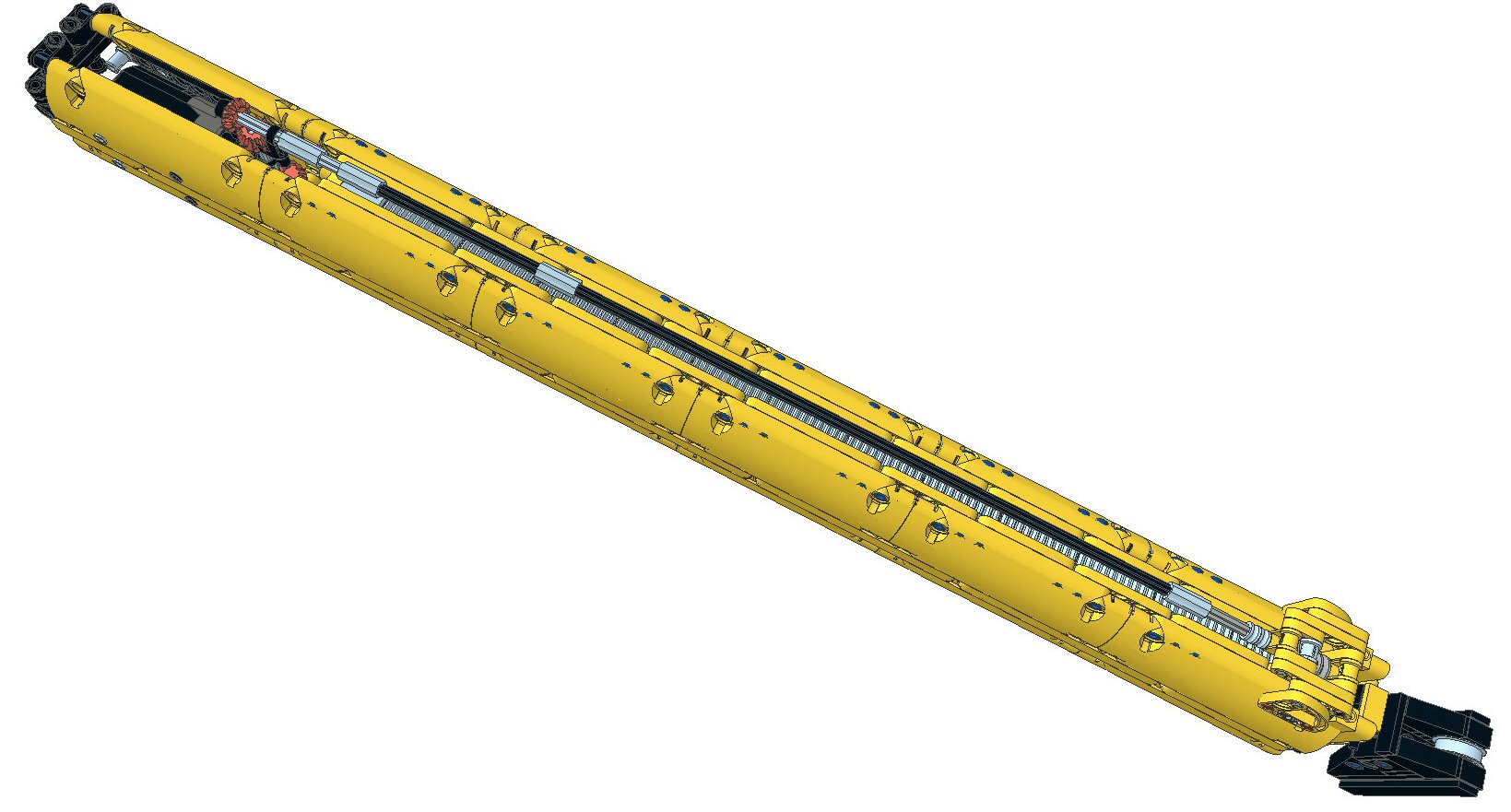
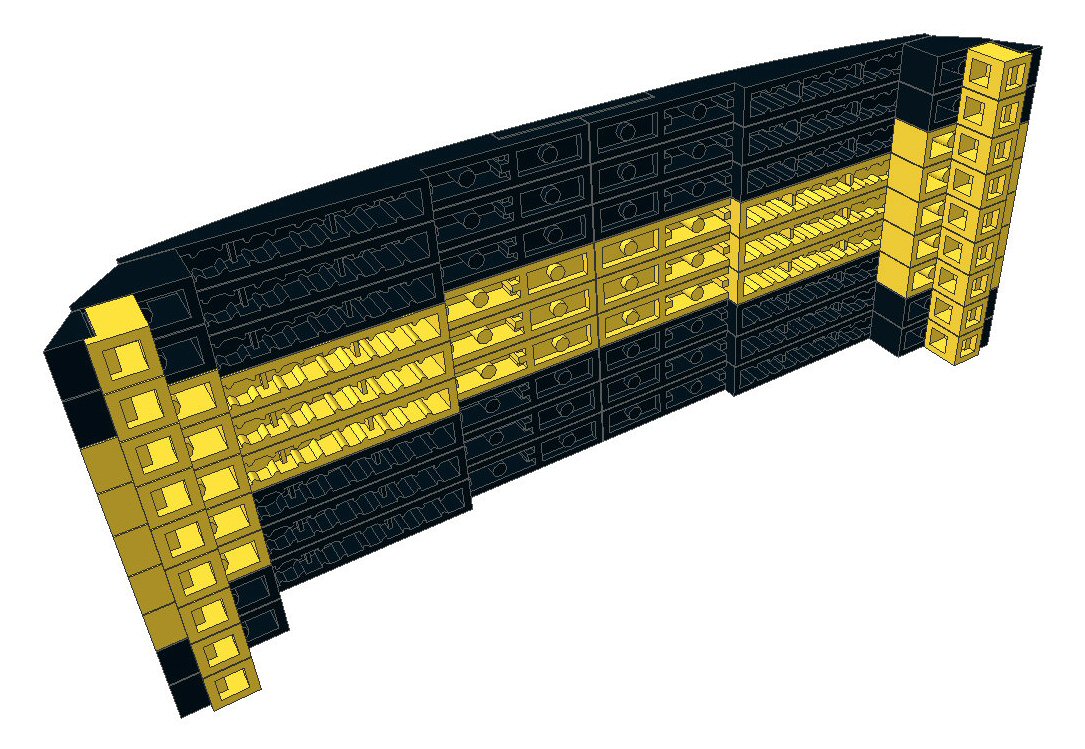
Ponieważ w założeniu było zbudowanie wysięgnika 4-sekcyjnego wyskalowanego mniej więcej na długość 70 studów musiałem zbudować jakiś "customowy" limear actuator, który będzie w stanie go podnieść. Powstał w ten sposób "siłownik", który w stanie spoczynku jest długi na 34 study, natomiast potrafi wysunąć się o kolejne 23 study. Po zbudowaniu siłownik leżał dość długi czas na półce i nie wiem dlaczego nie zrobiłem jego zdjęć, gdy jest poza modelem... Powiedzmy, że tu coś widać:


Kolejna rzecz to wysięgnik, czyli główny element roboczy dźwigu.
Pierwotnie jego konstrukcja opierała się głównie na zaokrąglonych, żółtych panelach 3x11, płaskich, szarych panelach 5x11 i całej masie technicowej drobnicy.



W wysięgniku zintegrowany był silnik L odpowiedzialny za wysuw teleskopu oraz silnik M odpowiedzialny za wciąganie linki. Pamiętam jak dziś, ten wysięgnik kończyłem jak w półfinale MŚ Brazylia dostała od Niemców 7:1 w .... :) czyli jakoś na początku lipca.
W zasadzie po zbudowaniu tego wysięgnika nastąpiła przerwa głównie spowodowana tym, że do kolejnych etapów budowy niezbędne mi były klocki z tegorocznej edycji programu BOP7.
Jako, że BOP nie nadchodził i nie nadchodził postanowiłem jednak powrócić do budowy z "tego co mam" i tak powstała pierwsza wersja ramy nadwozia:




Jak widać za łożyskowanie obrotu miały posłużyć tłoki lego'wych silników. W średnio zaawansowanym stadium tej budowy postanowiłem założyć to co zbudowałem na podwozie i zobaczyć jak zachowuje się funkcja obrotu (zredukowana w dość znacznym stopniu, aby osiągnąć fabryczne 2 obr./min).
Spotkała mnie niemiła niespodzianka, okazało się, że elementy w których osadzony był wałek obrotu przekazujący napęd na obrotnicę nieznacznie zmieniły swoje położenie (zsunęły się z osiek) więc cały projekt poszedł do kosza i budowa nadwozia zaczęła się od nowa...
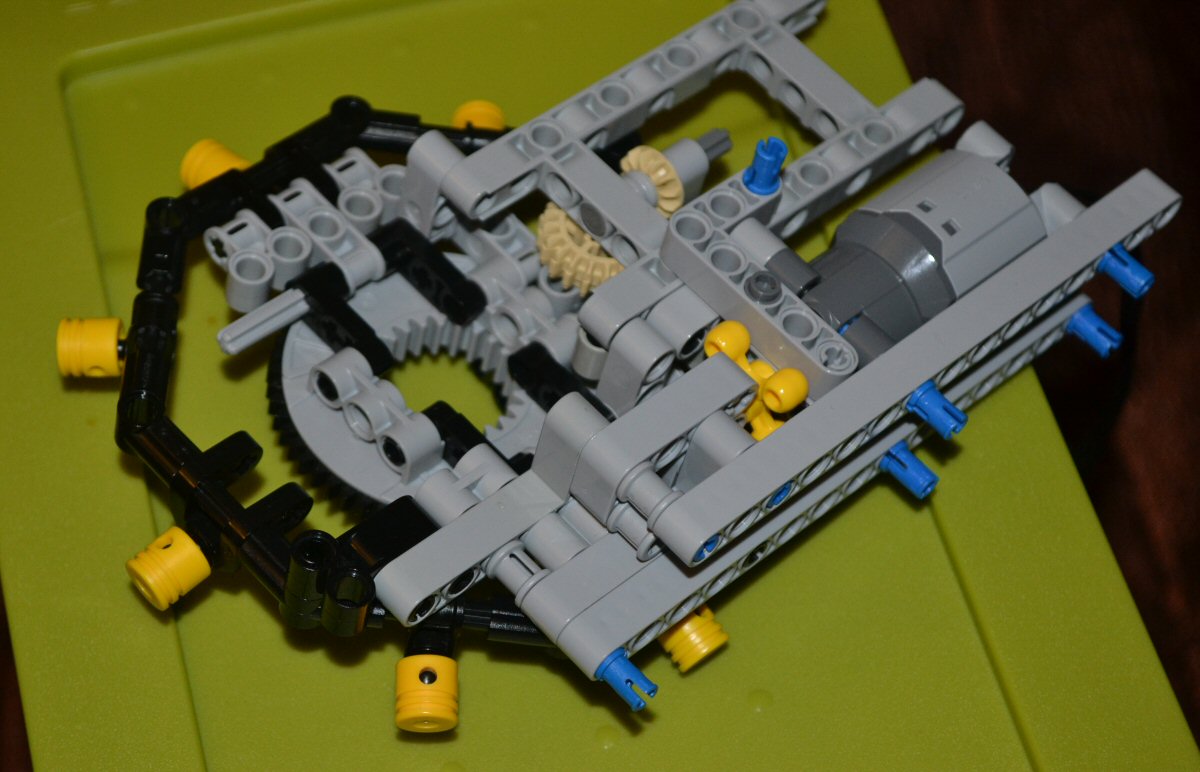
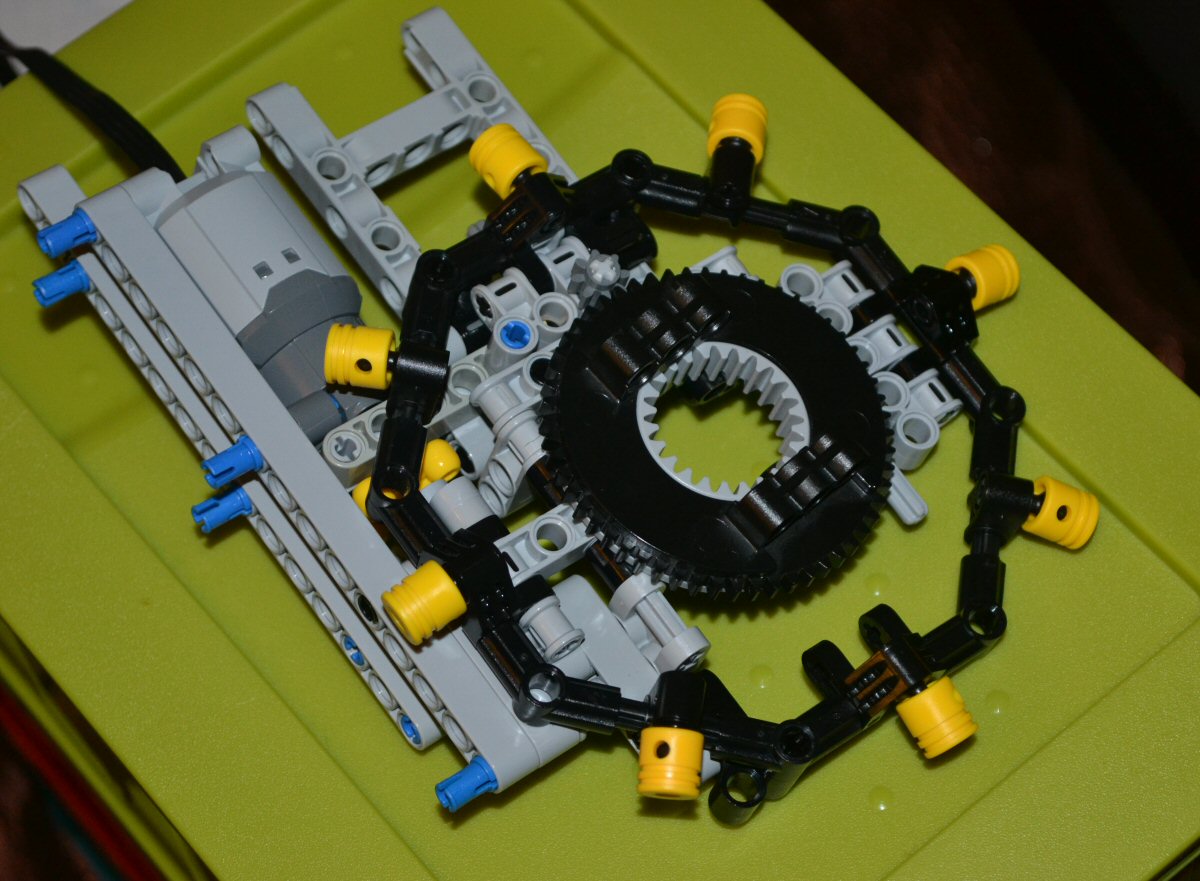
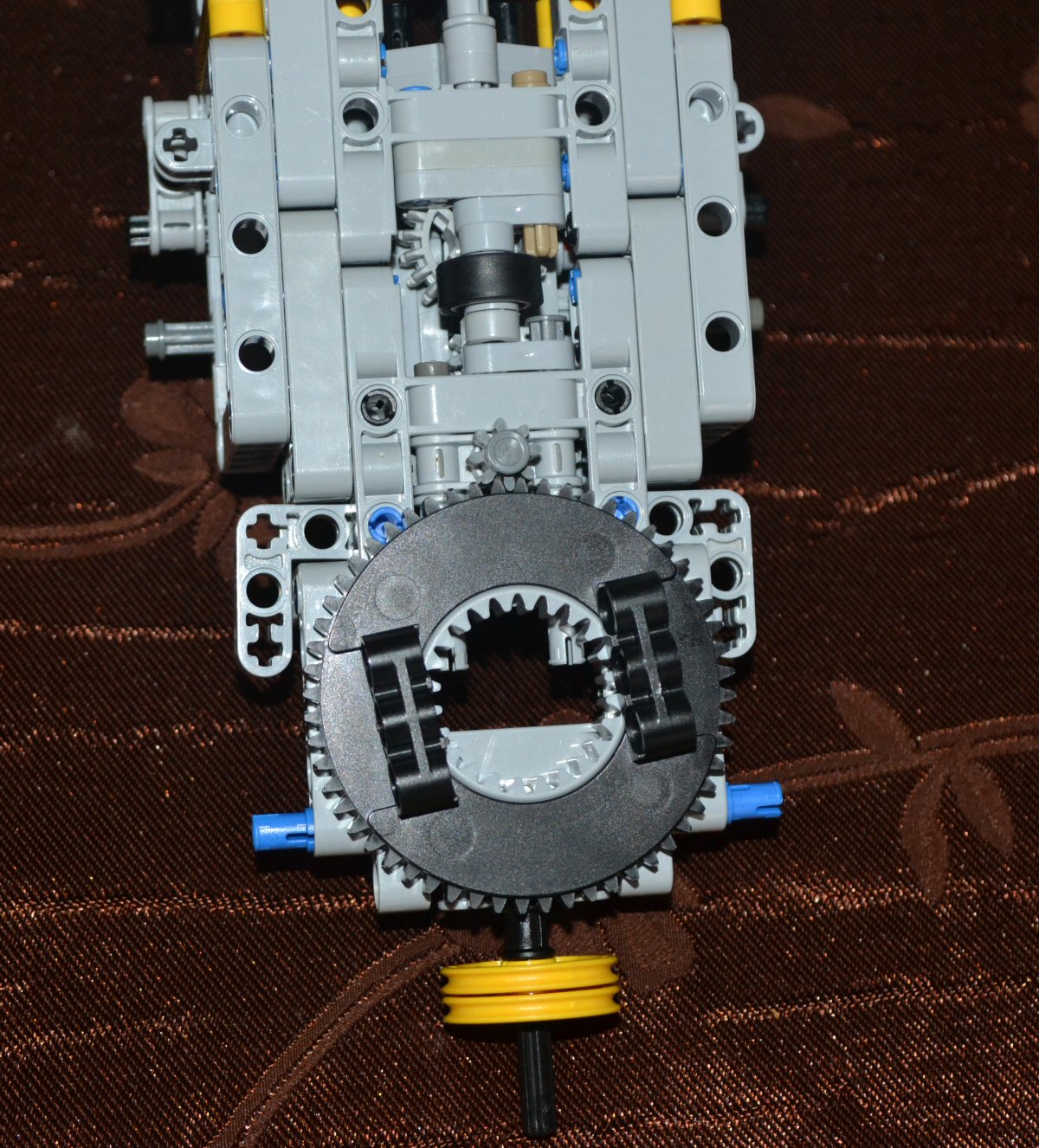
W drugim podejściu budowy nadwozia błąd został poprawiony, mechanizm obrotu został dość pancernie zabudowany:




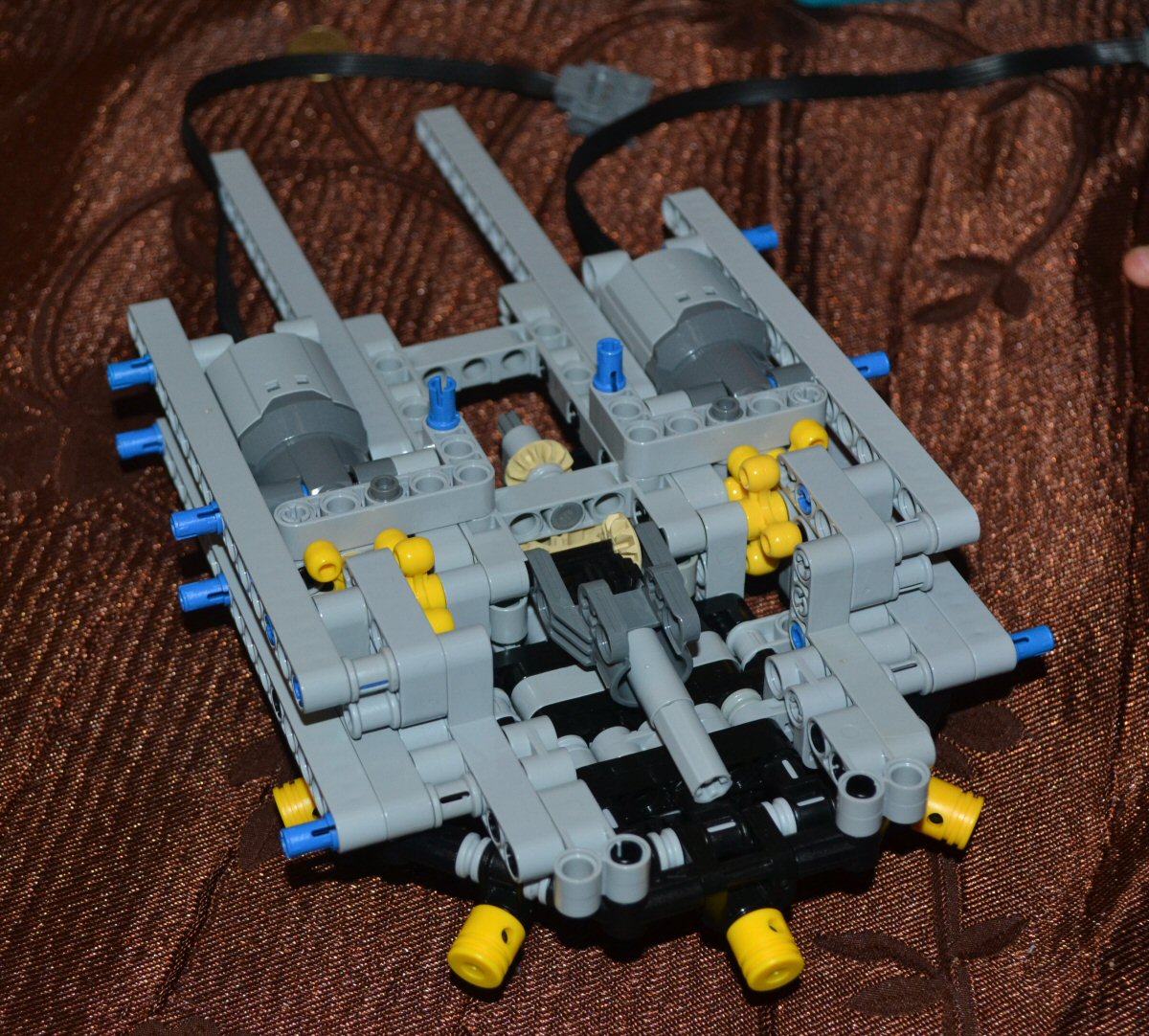
Jedziemy dalej, doszły 2 silniki L do podnoszenia ramienia, silnik M do funkcji obrotu, delikatna zabudowa dla batery boxa.
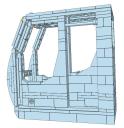
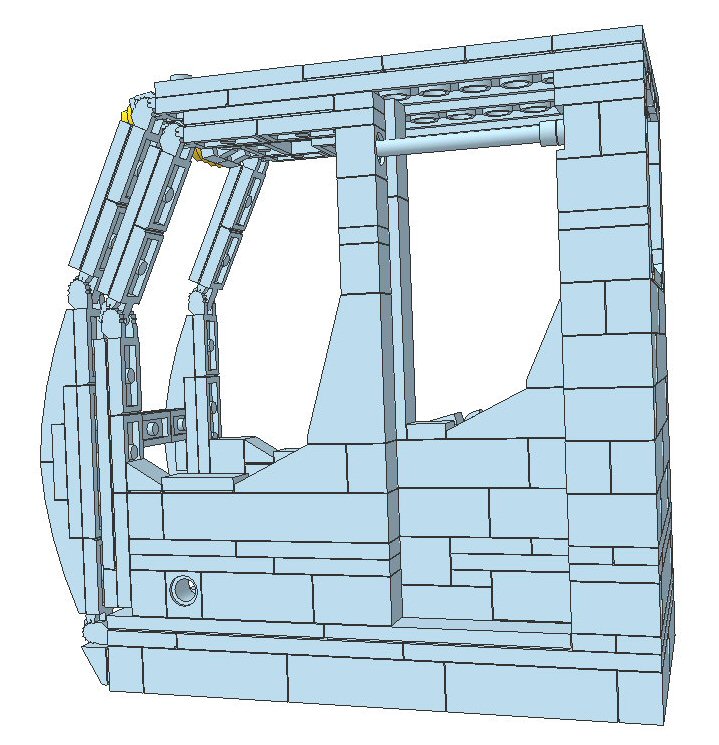
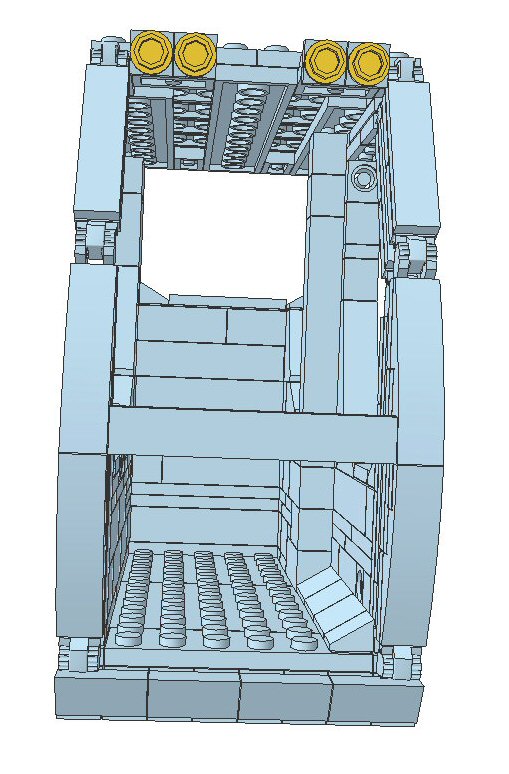
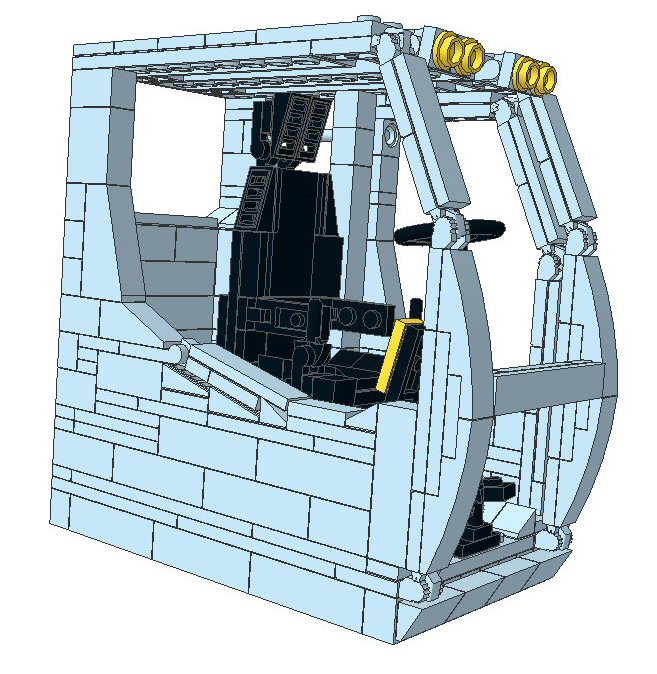
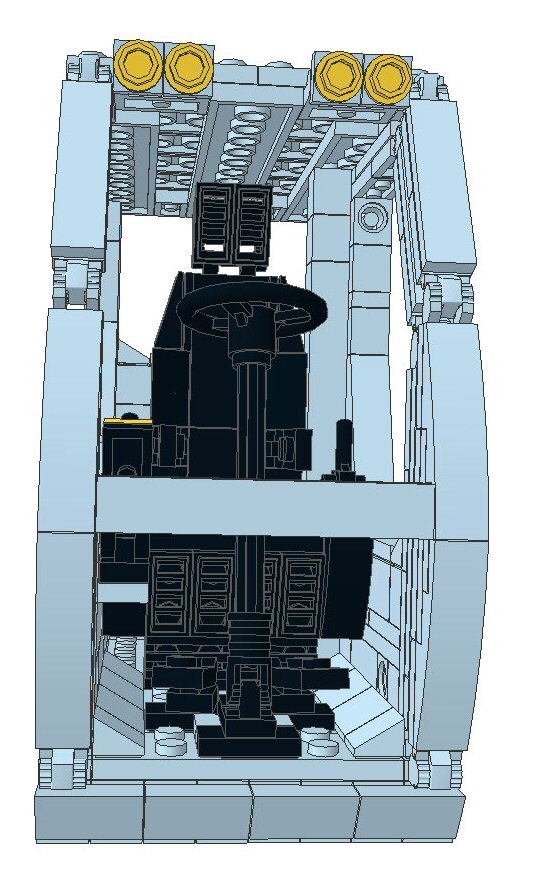
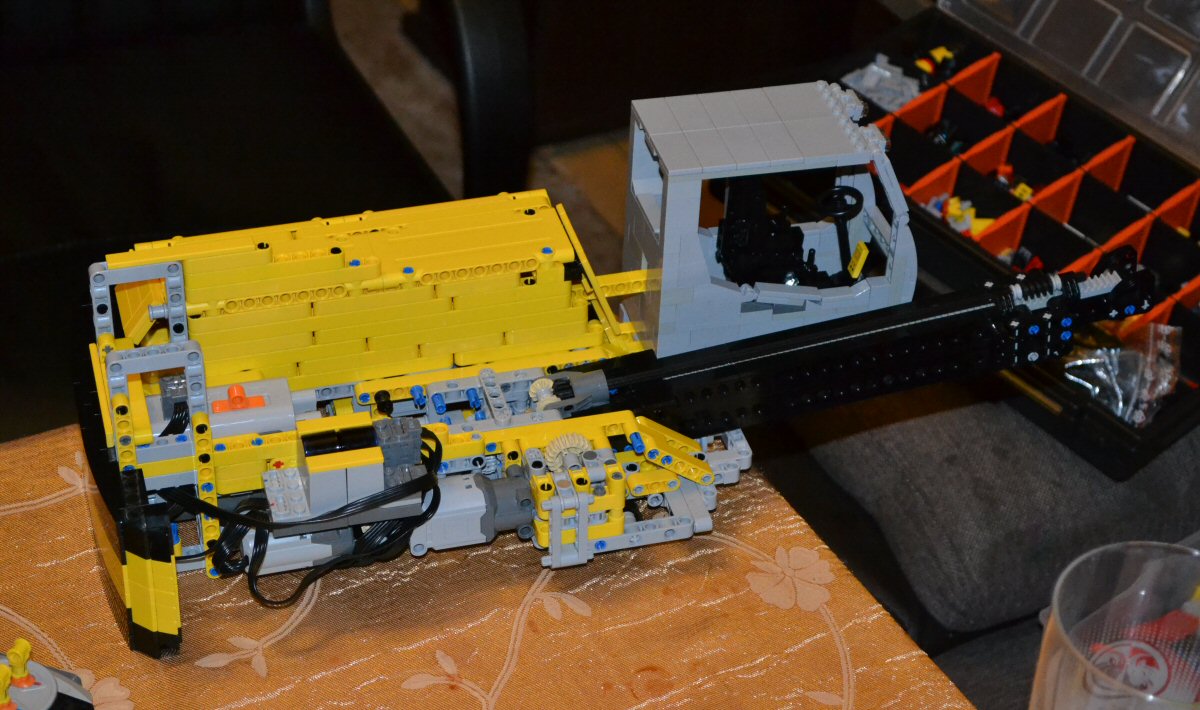
Przyszedł czas na odrobinę estetyki - budowa kabiny.
Póki co kabina powstała z tego co miałem:


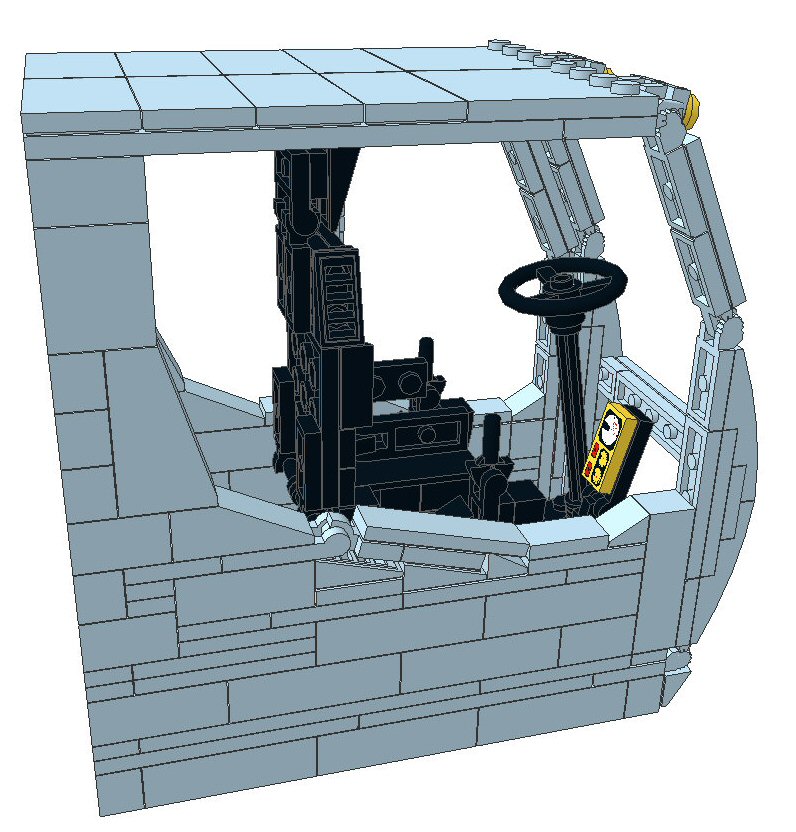
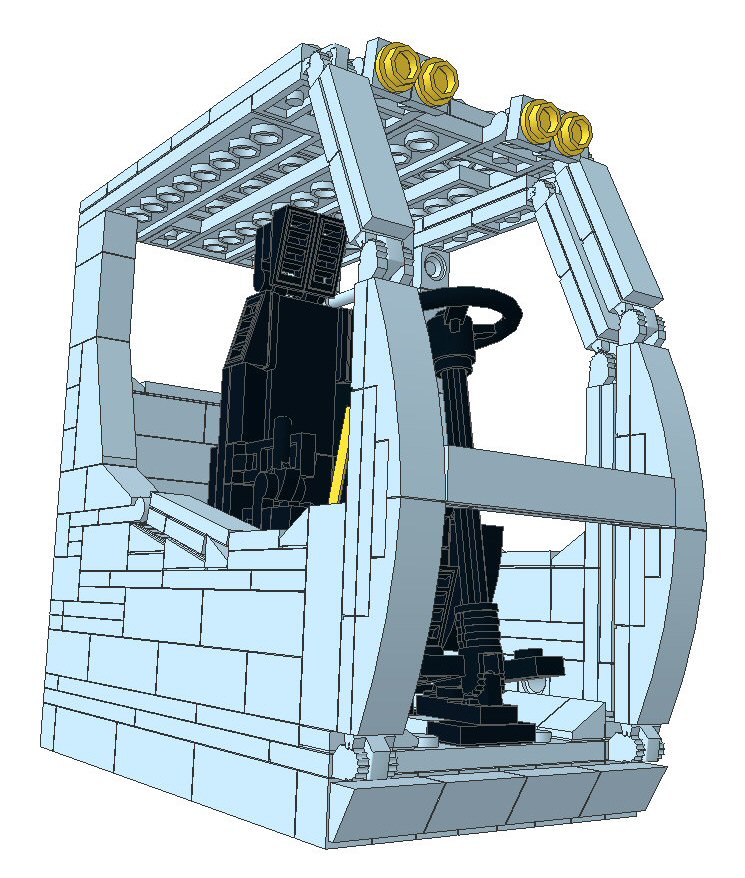
Następnie przeprosiłem się z MLcad'em i powstała wirtualna wersja:





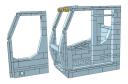

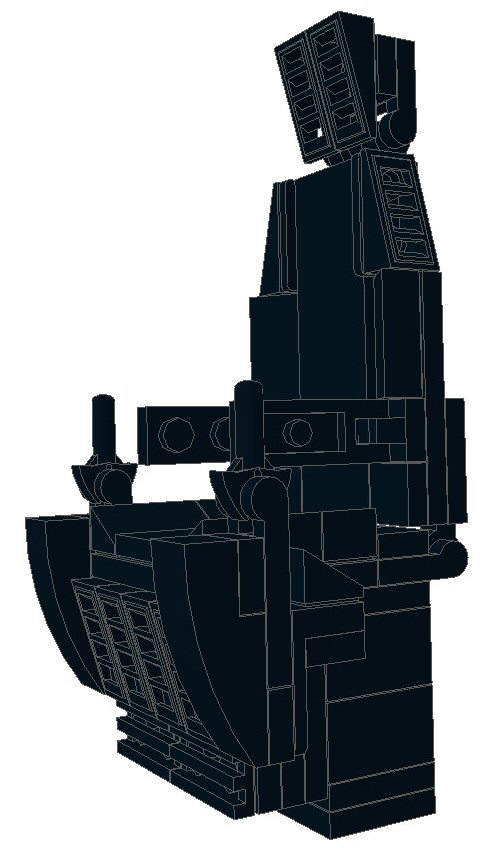
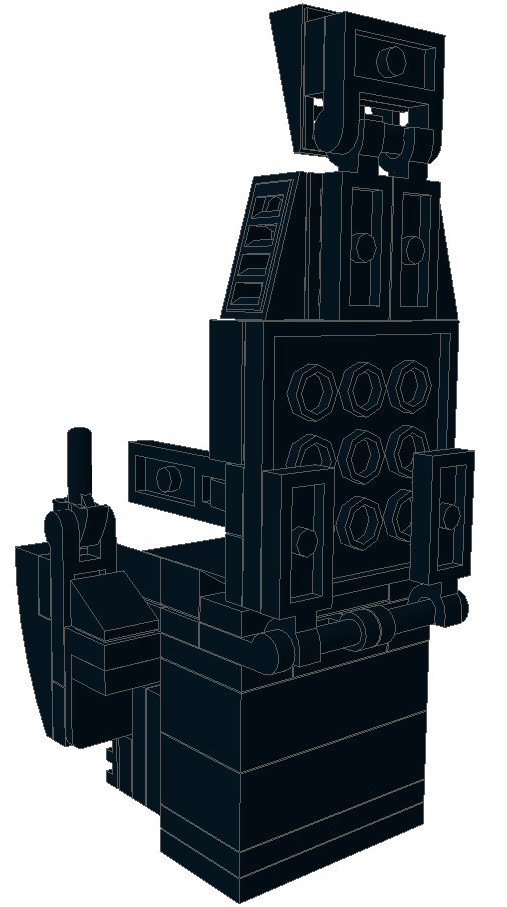
a razem z kabiną niezwykle wygodne siedzisko dla operatora:










Na tym etapie widać, też że powstał delikatny zarys zabudowy nadwozia panelami.
Mając to wszystko nauczony doświadczeniem postanowiłem po raz kolejny wstawić to co mam na podwozie i sprawdzić jak działa...



... i okazało się... że nie działa...
Okazało się, że to co zbudowałem albo nie ma siły podnieść wysięgnika albo wysięgnik jest za ciężki, a tak naprawdę wina była po tej i o tej stronie tj. wysięgnik ważył 850g a 2 L-ki miały napędzać mój customowy siłownik bez żadnego przełożenia.
I w ten sposób po raz kolejny cały mój dorobek związany z budową nadwozia + cały wysięgnik poszły na żyletki...
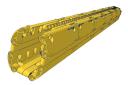
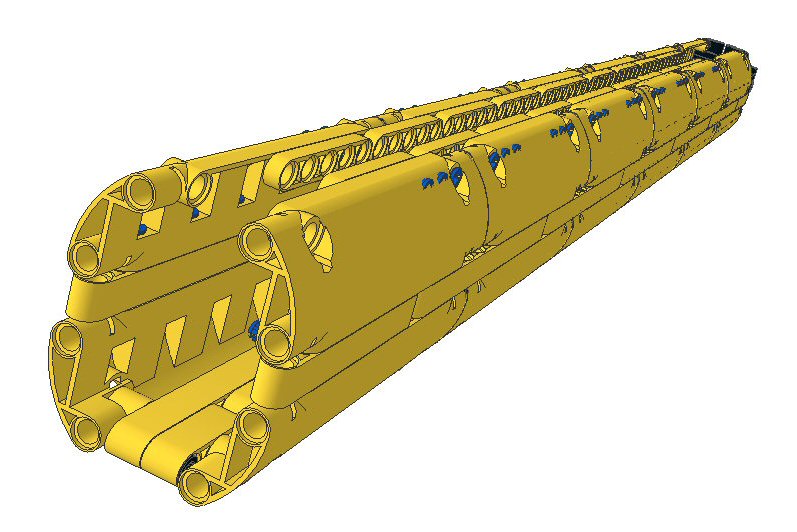
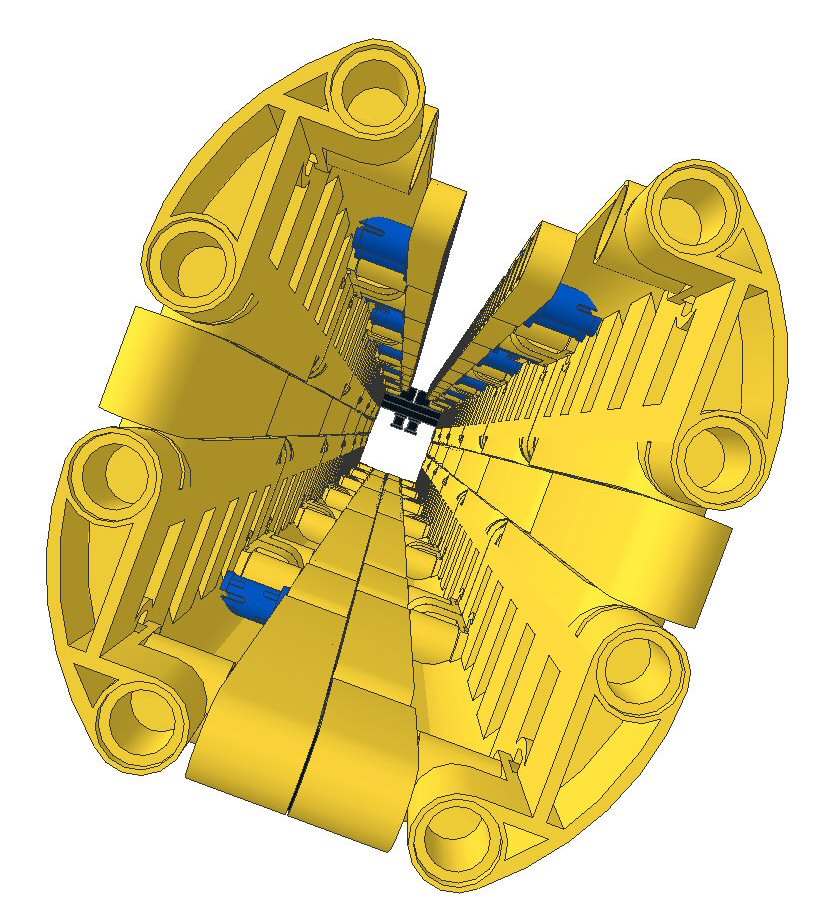
Po raz kolejny przeprosiłem się z MLcad'em i zaprojektowałem finalną wersję wysięgnika o przekroju 6x7 studów:
1-wsza sekcja, zbudowana głównie z półokrągłych paneli 3x11:

2-ga sekcja, zbudowana w parciu o półokrągłe panele 3x11 oraz Brick, Modified 2 x 4 x 1 1/3 with Curved Top:




3-cia sekcja, zgudowana głównie z Panel 1 x 2 x 2 - Solid Studs, plejtów i kafli 4x2:




i ostatnia, 4-ta sekcja:




Całość wygląda mniej więcej tak:









a w real'u tak:

Ostateczna wersja wysięgnika została odchudzona do 780g, niewiele, ale znacząco zyskała na wyglądzie.
Tak, jak ostatnio, wysuw teleskopu napędzany jest przez silnik L zamontowany wewnątrz teleskopu, 3-cia i -4-ta sekcja wysuwają się za pomocą linek.
Również tak jak ostatnio silnik M odpowiedzialny za zwijanie linki zintegrowany jest z wysięgnikiem, tyle, że na zewnątrz, dzięki czemu, wewnętrzne części teleskopu są dłuższe o parę studów, co przy 3 wewnętrznych częściach daje wysuw dłuższy o kilkanaście studów.
Do silnika prawie, że bezpośrenio przytwierdzony jest zwijak z linką, za haczyk służy standardowy lego'wy zestawowy haczyk.
W 3-ciej wersji nadwozia do podnoszenia wysięgnika miały służyć 2 silniki XL, ale nijak nie pasowały mi w zabudowie, zastosowałem więc 2 L-ki, przy czym między wyjściem z silników a siłownikiem jest redukcja 1:2.779.
Ta wersja nadwozia oraz ten wysięgnik współpracują ze sobą całkiem dobrze.
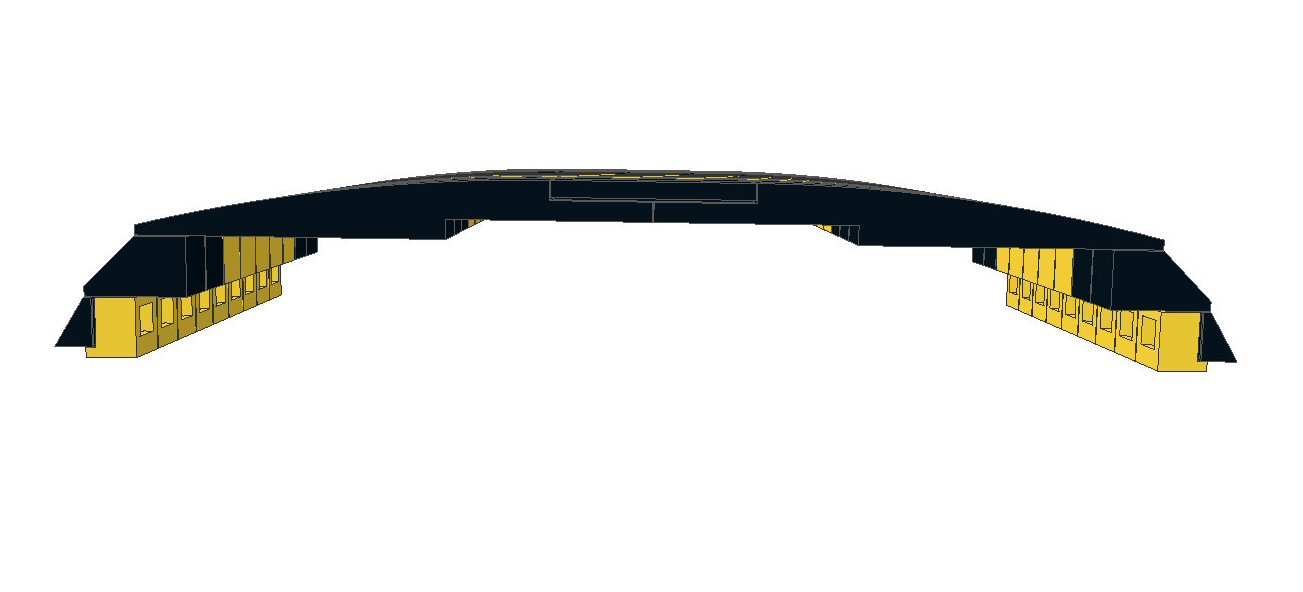
Po drodze powstał również projekt przeciwwagi, który miał wyglądać mniej więcej tak:


ostatecznie wygląda jednak mniej więcej tak:



W międzyczasie doszły moje zamówienia z BL oraz BOP7, więc czas zakończyć zabawę.
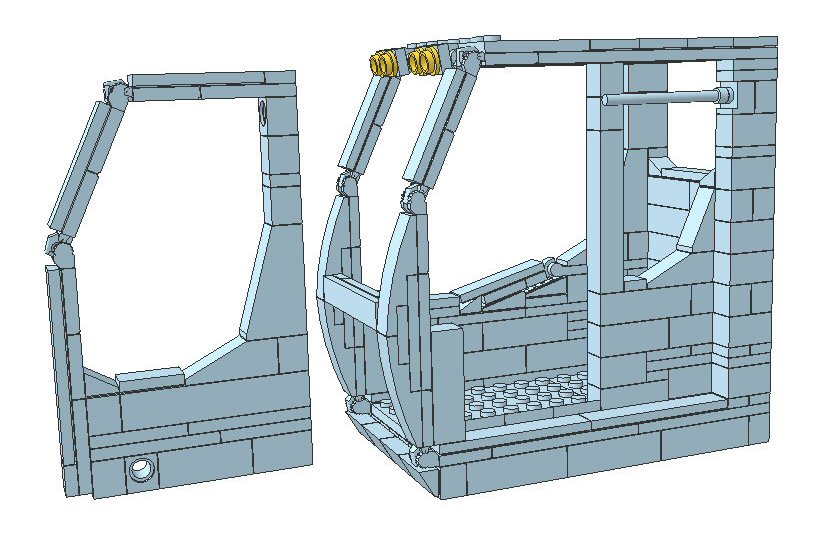
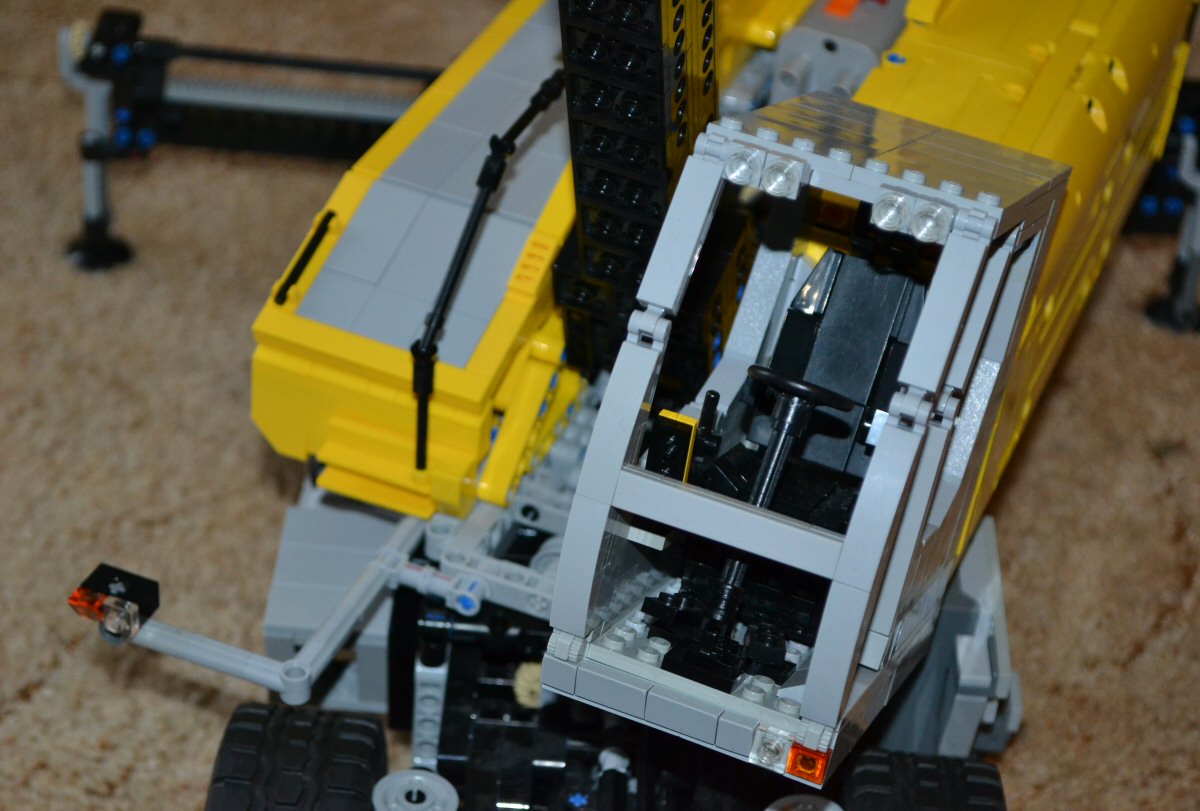
Została zbudowana jednokolorowa kabina z przesuwnymi drzwiami oraz mechanizm ją przechylający.
Budowa na ostatniej prostej szła tak szybko, że zanim zdążyłem obfotografować ten mechanizm zdążyłem zabudowałem go panelami... :)
Do przechyłu służy osobny silnik M podpięty pod ten sam port na odbiorniku IR co silniki od podnoszenia wysięgnika, z silnika wychodzi ośka ze ślimakiem, ślimak napędza sprzęgło z24, do którego podpięte są dźwigniki przechyłu kabiny. Działa poprawnie.





Lewa strona nadwozia została zabudowana panelami, prawa zaś głównie brickami i szarymi kafelkami.
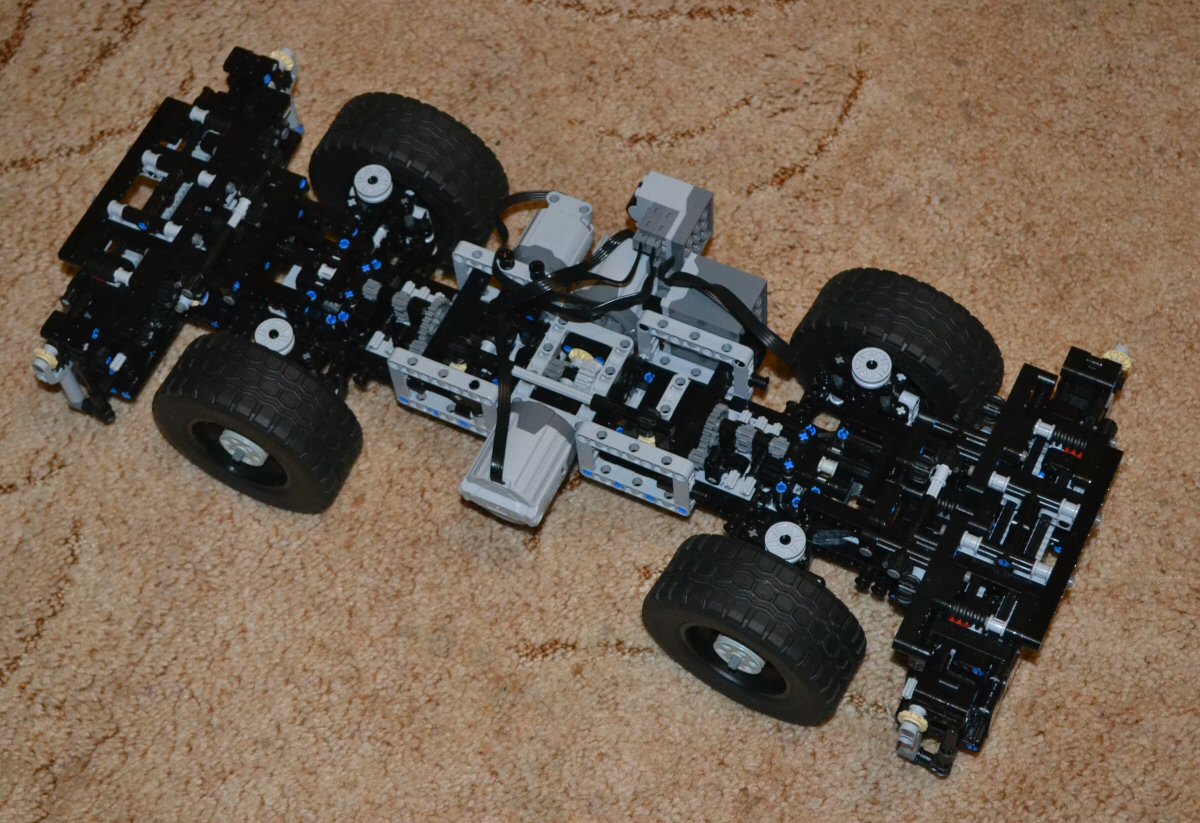
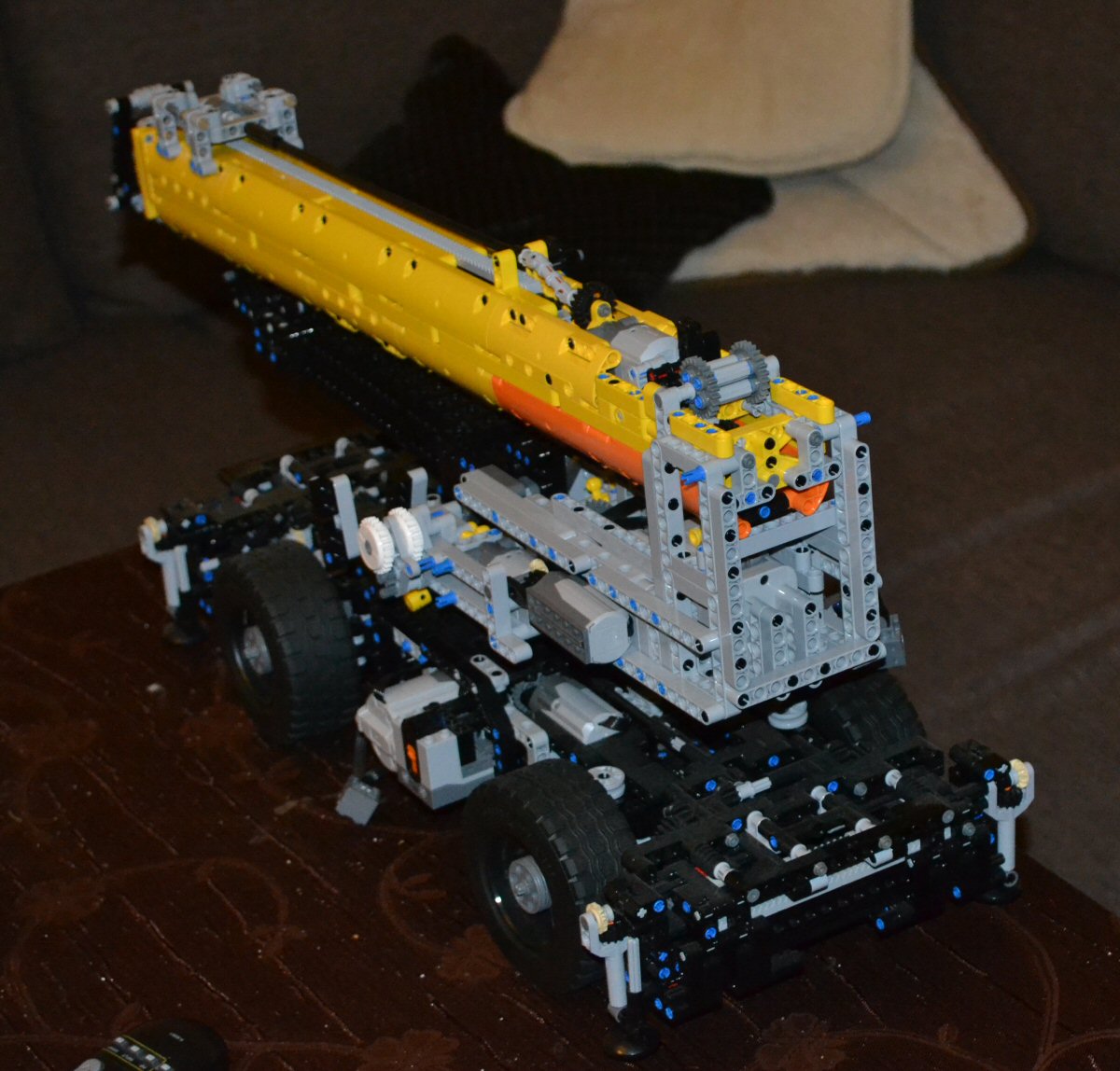
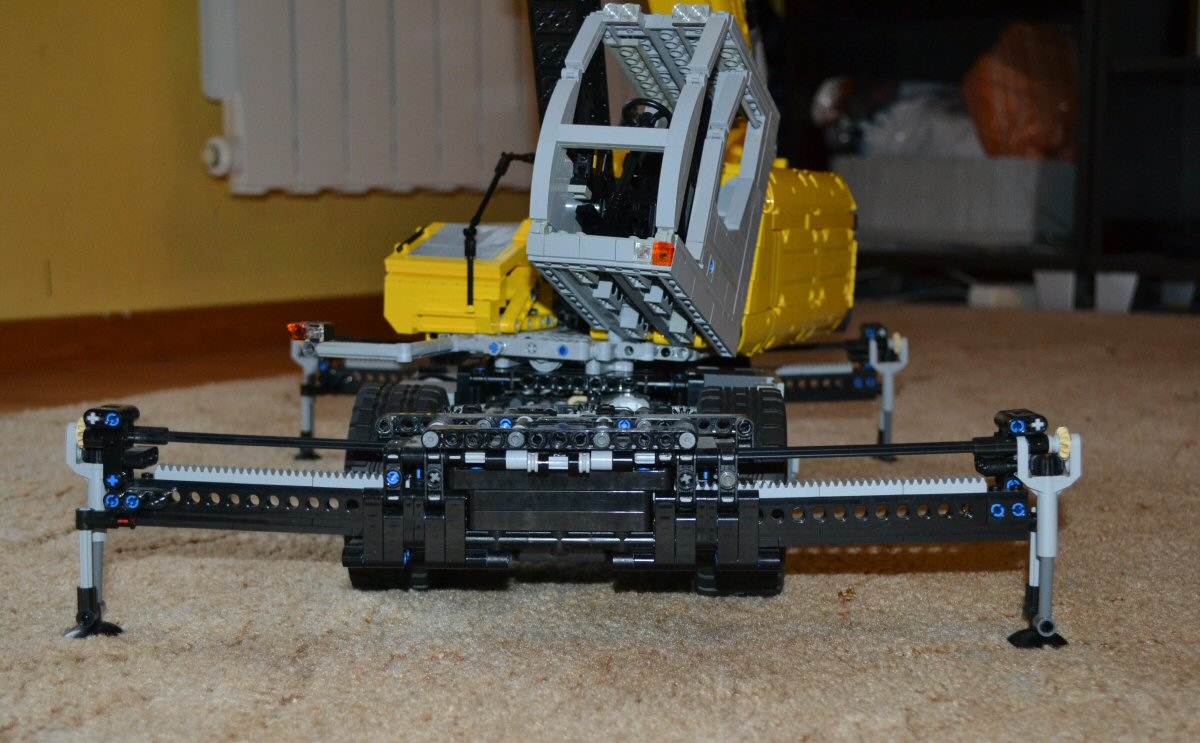
Tak oto powstała konstrukcja trafiła na podwozie, kilka dodatkowych pieszczot i tak oto powstał gotowy model:




















PODSUMOWANIE
Ufff... udało się zakończyć i model i recenzje. Gratulacje dla tych, którzy przebrnęli przez całą lekturę :)
Model w mojej ocenie prezentuje się całkiem ładnie, w szczególności nadwozie, przy którym miałem okazję się w jakimś stopniu wykazać (kabina, wysięgnik, zabudowa bryły).
To chyba pierwszy model, który tyle razy przebudowywałem. Pomimo faktu, iż wszystkie funkcje podwozia działają poprawnie to jednak bym je przebudował na konstrukcję w oparciu o dziurawe bricki. Podwozie ma grubość zaledwie 5-6 studów, pomimo wzmocnienia ramkami pod obciążeniem podwozia nieznacznie się odkształca. Niestety nie udało mi się bardziej wzmocnić konstrukcji podwozia, głównie przez to, że musiało się w nim zmieścić naprawdę sporo mechaniki.
Po raz kolejny jak zazwyczaj przy większych konstrukcji brakuje fabrycznych lego'wych dużych obrotnic oraz siłowników śrubowych, wtedy można posiłkować się albo niekoszernymi częściami albo budować toporne komponenty, które mimo wszystko będą spełniały swoją funkcję.
Cieszę się przede wszystkim, że udało się zbudować kołowe podwozie z teleskopowymi podporami oraz 4-sekcyjny wysięgnik.
Model jest oczywiście bawialny, jednak należy pamiętać o dużej bezwładności w pełni wyciągniętego wysięgnika.
To również pierwszy tak długo-terminowy projekt w moim wykonaniu. Dzięki niemu przeprosiłem się z MLcad'em, jak się okazało to dobre narzędzie do estymacji potrzebnych elementów do danej budowy.
To chyba tyle...
Zapraszam do GALERII oraz na FILM (UWAGA MALKONTENCI - długość filmu 8:24 min :)
SENNEBOGEN 643 Mobile Telescopic Crane
DANE TECHNICZNE:
- 2 x PF XL motor
- 3 x PF L motor
- 6 x PF M motor
- 4 x IR receiver
- 1 x PF 6xAA Battery Box
- 1 x PF 6xAAA Battery Box
- skala: 1:14
- waga: 4220 g
- wysokość z maksymalnie podniesionym i wysuniętym wysięgnikiem: 150 cm
- wysięgnik 4-sekcyjny
- rozstaw łap przy rozłożonych podporach: 40 x 43 cm
- napęd na wszystkie koła, wszystkie koła skrętne
- uchylna kabina
- model w pełni zdalnie sterowany
GENEZA POWSTANIA
Jeśli ktoś śledzi moje poczynania, to wie, że upodobałem sobie odtwarzanie wszelkiej maści maszyn produkcji Sennebogen z locków lego.
W swoim dorobku mam już podobne maszyny do prezentowanego modelu jak [URL=http://www.00453005_0000002.pl/forum/viewtopic.php?t=16213]Sennebogen 680 HMC (Harbour Mobile Crane)[/URL] i Sennebogen 683 HD - gąsienicowy żuraw teleskopowy.
Pierwszy z nich jest mobilny, ale linowy, drugi z nich teleskopowy, ale gąsienicowy.
Moim zamysłem było zbudowanie kołowego dźwigu, z podporami rozkładanymi teleskopowo oraz z teleskopowym, 4-sekcyjnym wysięgnikiem, wybór padł na model 643M:






Budowę rozpocząłem w maju tego roku, zakończyłem zaś w grudniu, więc po kolei:
UWAGA MALKONTENCI: budowałem długo, więc opis też jest długi! :)
Model zacząłem skalować wg kół 94.3x38 z Unimoga, w ten sposób powstały obie osie, zamocowane na prowizorycznej ramie:


Obie osie są swoimi lustrzanymi odbiciami, obie osie są osiami jezdnymi i skrętnymi.
Kolejna rzecz, która powstała to moduły z podporami.



Budowa modułów z podporami była w miarę nieskomplikowana dzięki czerwonym zębatkom z8 without friction, które miały swoją premierę w modelu 42009. Każda z podpór wysuwa się na długość 12 studów. Za opuszczanie podpór odpowiadają małe siłowniki śrubowe. Niestety obie funkcje działają dość ślamazarnie, ponieważ do ich obsługi służą przełożenia ze ślimaka na z8.
Gotowe moduły z podporami trafiły na ramę podwozia:


Następnie należało wypełnić przestrzeń między modułami i osiami.
W pierwszej kolejności zamontowałem napęd oraz mechanizm skrętu, pierwotnie wyglądało to tak:
i w tym momencie zaczęły się schody, bo przy takim ustawieniu silników nie ma mowy o dołożeniu kolejnych silników do rozkładania i opuszczania podpór.
Dlatego podwozie zostało przebudowane, wszystkie silniki poza tymi do napędu zostały umieszczone równolegle do linii podwozia:

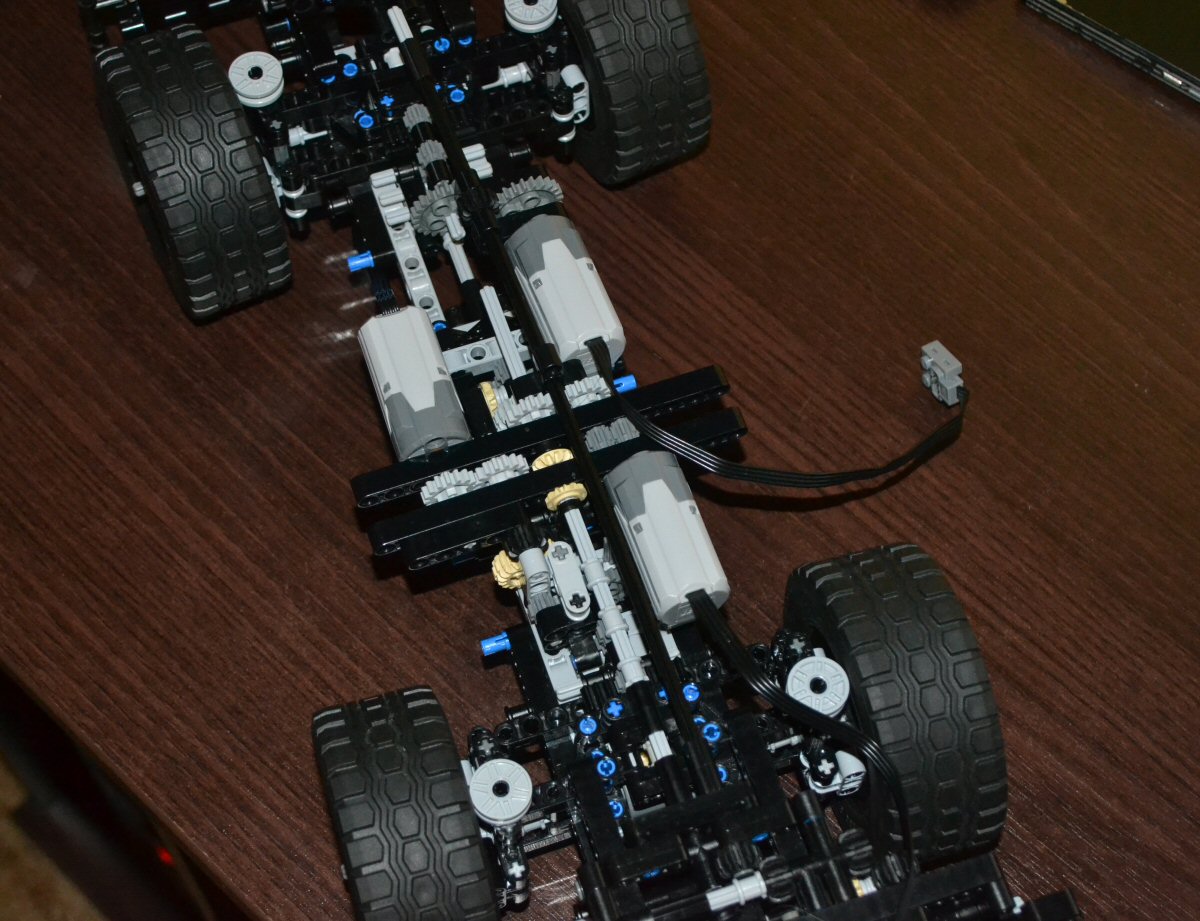
Tu największym problemem był fakt, że przez całe podwozie musiały być przepuszczone 4 napędy: jazda, skręt, wysuwanie i opuszczanie podpór, dodatkowo przód i tył musiał być ze sobą sprzężony.
Ostatecznie w podwoziu zrobiło się naprawdę ciasno, ilość zębatek rosła w tempie wykładniczym :) ale udało sie osiagnąć cel i ostatecznie mamy:
- 2 x silnik XL odpowiadają za jazdę (przełożenie 1:7)
- 1 x silnik M do skrętu (bez sprzęgła)
- 1 x silnik M do wysuwania podpór
- 1 x silnik M do opuszczania podpór
Dodatkowo na podwoziu zamontowane są 2 odbiorniki podczerwieni i mały battery box.
Podwozie udało się ukończyć na koniec maja



Po zakończeniu podwozia przyszedł czas na budowę elementów nadwozia.
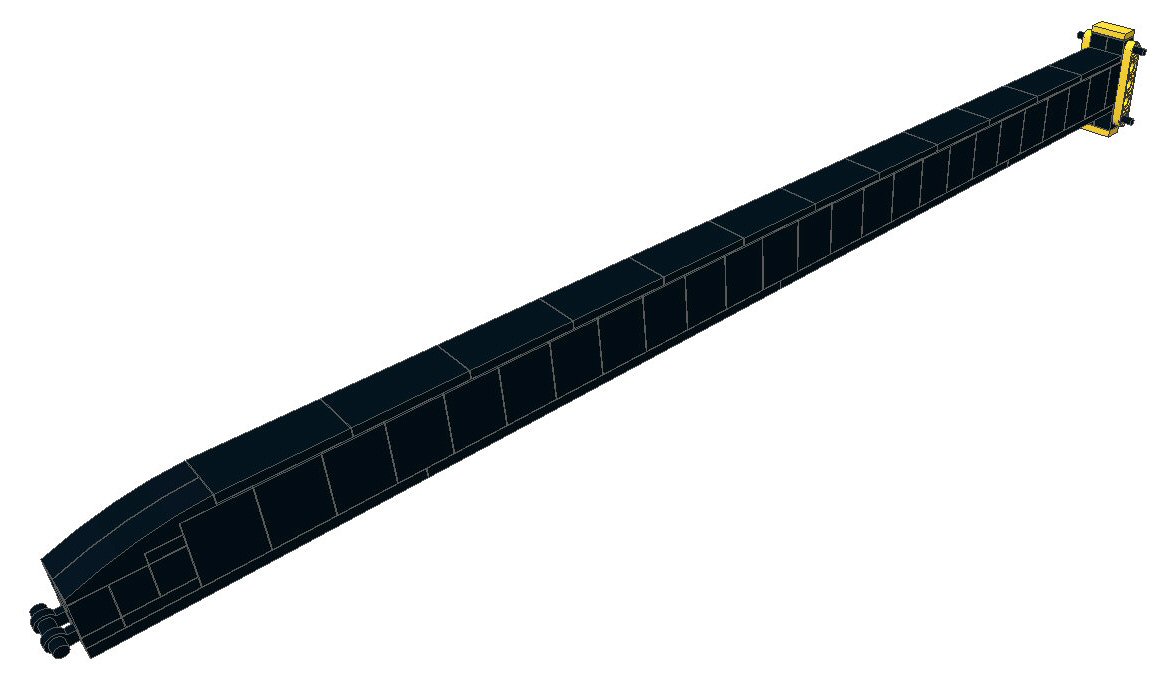
Ponieważ w założeniu było zbudowanie wysięgnika 4-sekcyjnego wyskalowanego mniej więcej na długość 70 studów musiałem zbudować jakiś "customowy" limear actuator, który będzie w stanie go podnieść. Powstał w ten sposób "siłownik", który w stanie spoczynku jest długi na 34 study, natomiast potrafi wysunąć się o kolejne 23 study. Po zbudowaniu siłownik leżał dość długi czas na półce i nie wiem dlaczego nie zrobiłem jego zdjęć, gdy jest poza modelem... Powiedzmy, że tu coś widać:


Kolejna rzecz to wysięgnik, czyli główny element roboczy dźwigu.
Pierwotnie jego konstrukcja opierała się głównie na zaokrąglonych, żółtych panelach 3x11, płaskich, szarych panelach 5x11 i całej masie technicowej drobnicy.



W wysięgniku zintegrowany był silnik L odpowiedzialny za wysuw teleskopu oraz silnik M odpowiedzialny za wciąganie linki. Pamiętam jak dziś, ten wysięgnik kończyłem jak w półfinale MŚ Brazylia dostała od Niemców 7:1 w .... :) czyli jakoś na początku lipca.
W zasadzie po zbudowaniu tego wysięgnika nastąpiła przerwa głównie spowodowana tym, że do kolejnych etapów budowy niezbędne mi były klocki z tegorocznej edycji programu BOP7.
Jako, że BOP nie nadchodził i nie nadchodził postanowiłem jednak powrócić do budowy z "tego co mam" i tak powstała pierwsza wersja ramy nadwozia:

Jak widać za łożyskowanie obrotu miały posłużyć tłoki lego'wych silników. W średnio zaawansowanym stadium tej budowy postanowiłem założyć to co zbudowałem na podwozie i zobaczyć jak zachowuje się funkcja obrotu (zredukowana w dość znacznym stopniu, aby osiągnąć fabryczne 2 obr./min).
Spotkała mnie niemiła niespodzianka, okazało się, że elementy w których osadzony był wałek obrotu przekazujący napęd na obrotnicę nieznacznie zmieniły swoje położenie (zsunęły się z osiek) więc cały projekt poszedł do kosza i budowa nadwozia zaczęła się od nowa...
W drugim podejściu budowy nadwozia błąd został poprawiony, mechanizm obrotu został dość pancernie zabudowany:



Jedziemy dalej, doszły 2 silniki L do podnoszenia ramienia, silnik M do funkcji obrotu, delikatna zabudowa dla batery boxa.
Przyszedł czas na odrobinę estetyki - budowa kabiny.
Póki co kabina powstała z tego co miałem:


Następnie przeprosiłem się z MLcad'em i powstała wirtualna wersja:
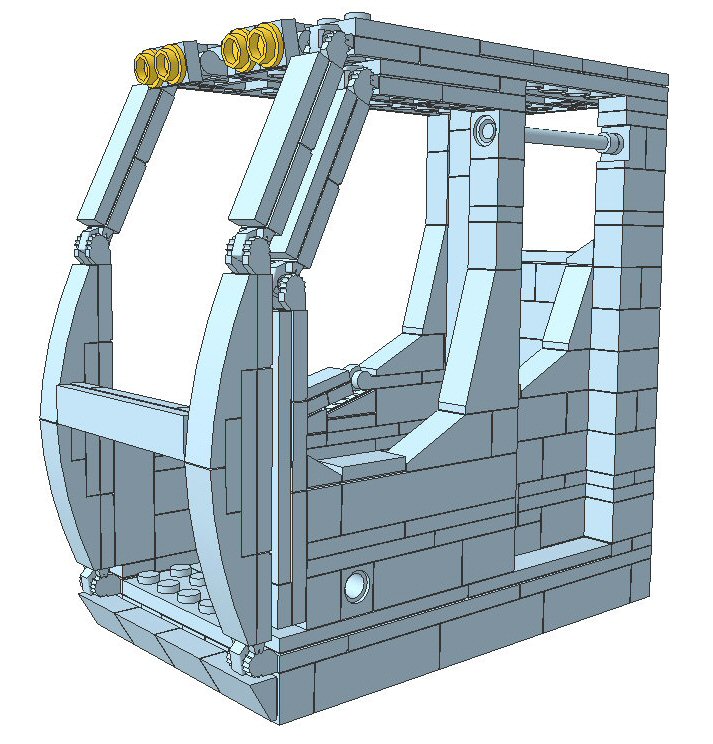
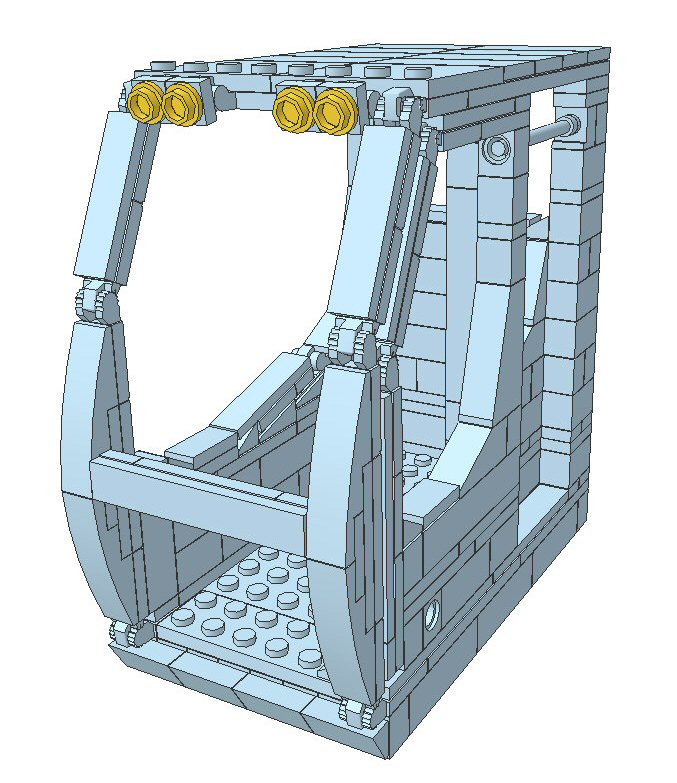



a razem z kabiną niezwykle wygodne siedzisko dla operatora:



Na tym etapie widać, też że powstał delikatny zarys zabudowy nadwozia panelami.
Mając to wszystko nauczony doświadczeniem postanowiłem po raz kolejny wstawić to co mam na podwozie i sprawdzić jak działa...


... i okazało się... że nie działa...
Okazało się, że to co zbudowałem albo nie ma siły podnieść wysięgnika albo wysięgnik jest za ciężki, a tak naprawdę wina była po tej i o tej stronie tj. wysięgnik ważył 850g a 2 L-ki miały napędzać mój customowy siłownik bez żadnego przełożenia.
I w ten sposób po raz kolejny cały mój dorobek związany z budową nadwozia + cały wysięgnik poszły na żyletki...
Po raz kolejny przeprosiłem się z MLcad'em i zaprojektowałem finalną wersję wysięgnika o przekroju 6x7 studów:
1-wsza sekcja, zbudowana głównie z półokrągłych paneli 3x11:

2-ga sekcja, zbudowana w parciu o półokrągłe panele 3x11 oraz Brick, Modified 2 x 4 x 1 1/3 with Curved Top:
3-cia sekcja, zgudowana głównie z Panel 1 x 2 x 2 - Solid Studs, plejtów i kafli 4x2:
i ostatnia, 4-ta sekcja:


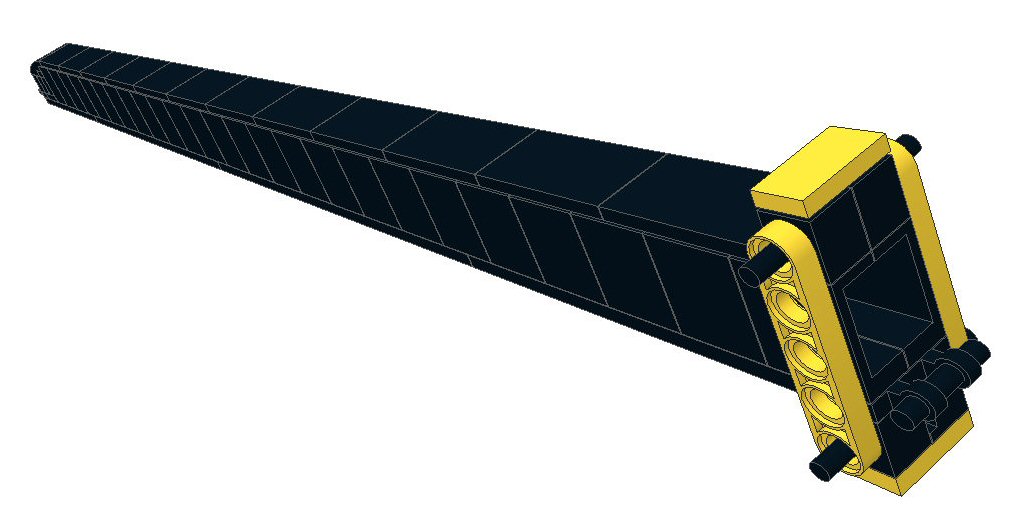
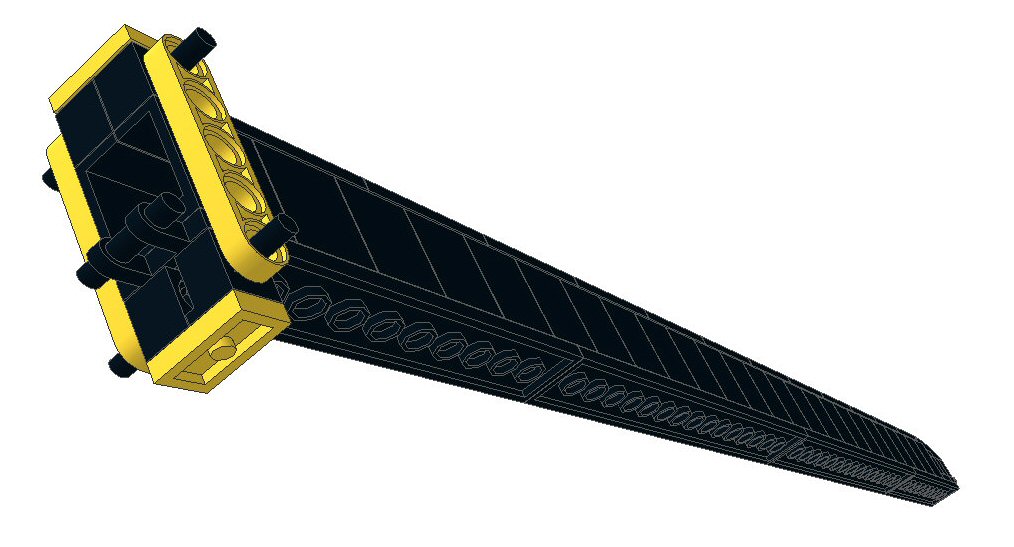
Całość wygląda mniej więcej tak:



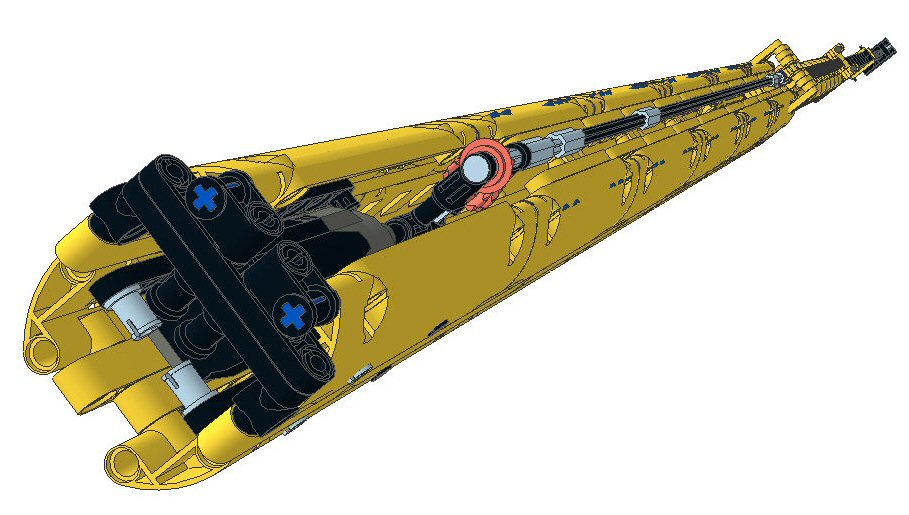



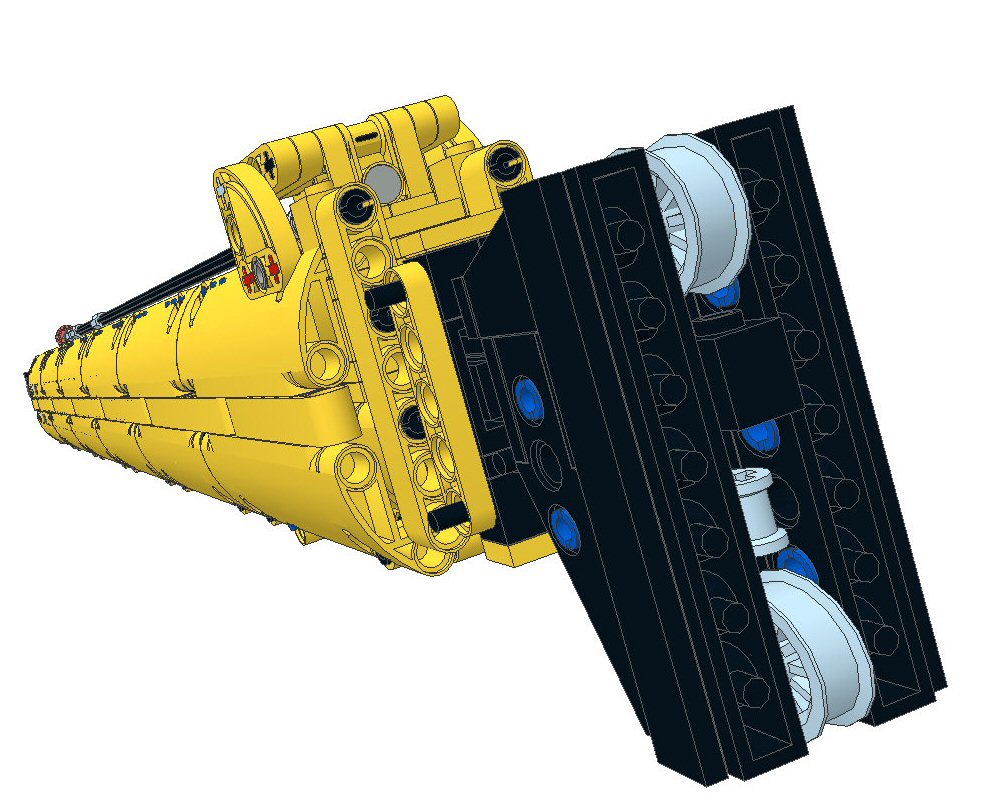
a w real'u tak:

Ostateczna wersja wysięgnika została odchudzona do 780g, niewiele, ale znacząco zyskała na wyglądzie.
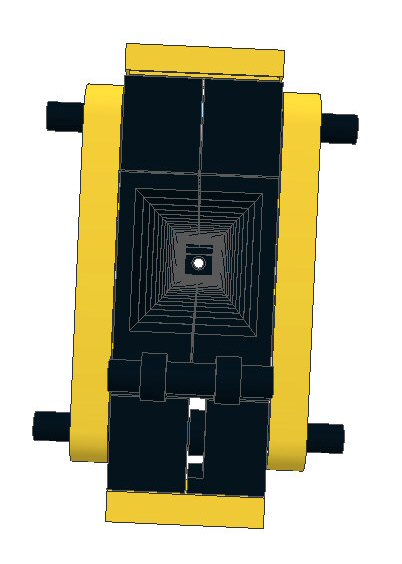
Tak, jak ostatnio, wysuw teleskopu napędzany jest przez silnik L zamontowany wewnątrz teleskopu, 3-cia i -4-ta sekcja wysuwają się za pomocą linek.
Również tak jak ostatnio silnik M odpowiedzialny za zwijanie linki zintegrowany jest z wysięgnikiem, tyle, że na zewnątrz, dzięki czemu, wewnętrzne części teleskopu są dłuższe o parę studów, co przy 3 wewnętrznych częściach daje wysuw dłuższy o kilkanaście studów.
Do silnika prawie, że bezpośrenio przytwierdzony jest zwijak z linką, za haczyk służy standardowy lego'wy zestawowy haczyk.
W 3-ciej wersji nadwozia do podnoszenia wysięgnika miały służyć 2 silniki XL, ale nijak nie pasowały mi w zabudowie, zastosowałem więc 2 L-ki, przy czym między wyjściem z silników a siłownikiem jest redukcja 1:2.779.
Ta wersja nadwozia oraz ten wysięgnik współpracują ze sobą całkiem dobrze.
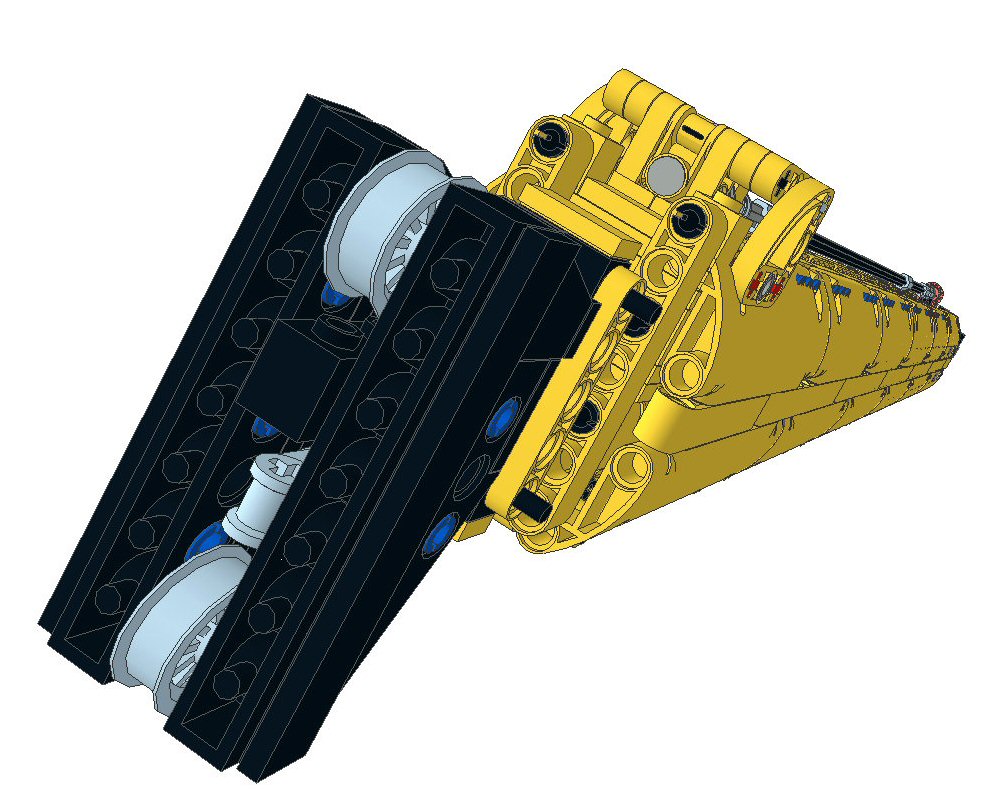
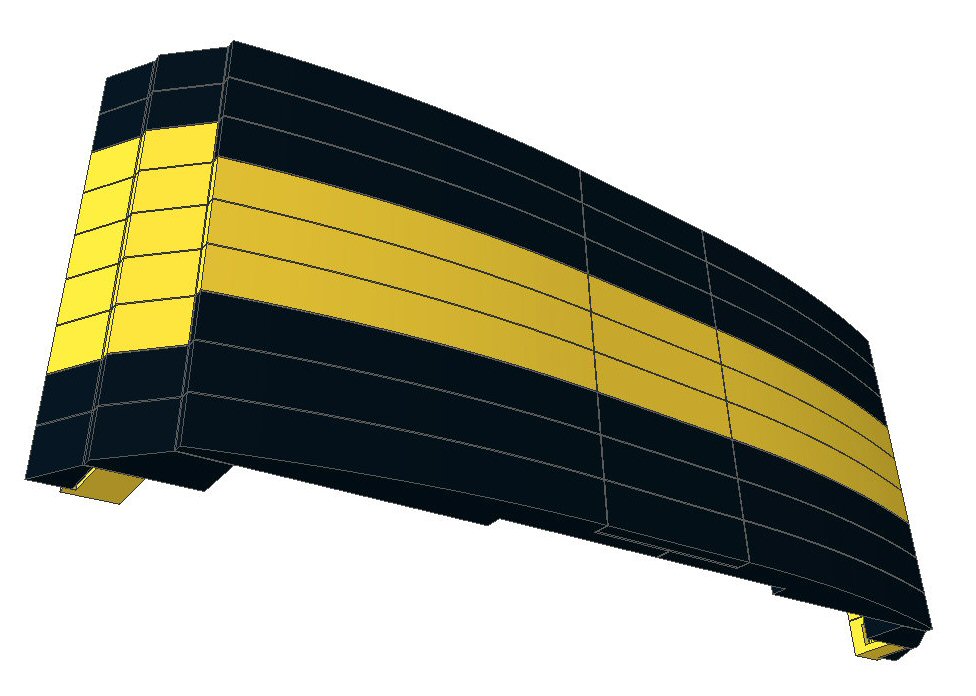
Po drodze powstał również projekt przeciwwagi, który miał wyglądać mniej więcej tak:

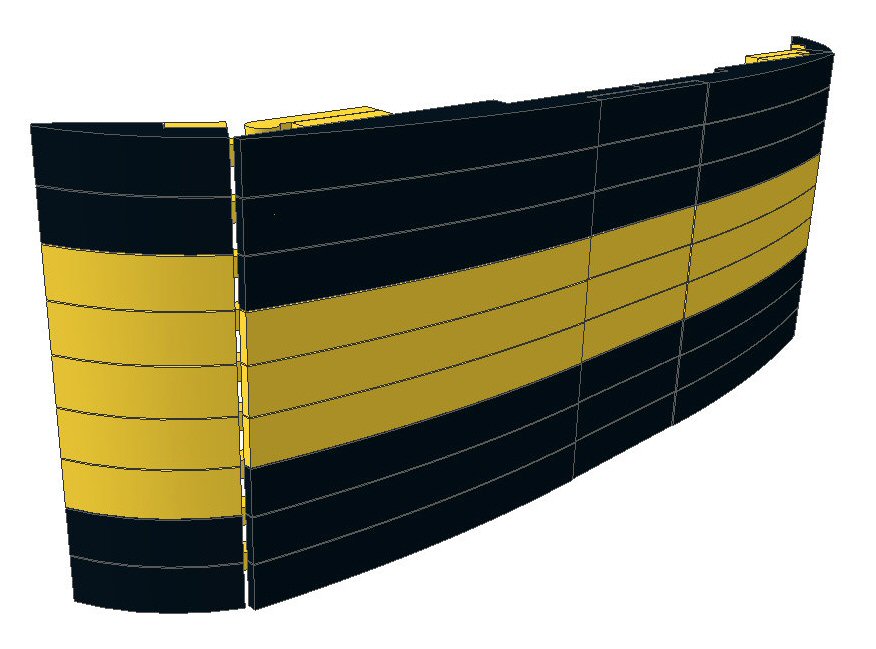
ostatecznie wygląda jednak mniej więcej tak:
W międzyczasie doszły moje zamówienia z BL oraz BOP7, więc czas zakończyć zabawę.
Została zbudowana jednokolorowa kabina z przesuwnymi drzwiami oraz mechanizm ją przechylający.
Budowa na ostatniej prostej szła tak szybko, że zanim zdążyłem obfotografować ten mechanizm zdążyłem zabudowałem go panelami... :)
Do przechyłu służy osobny silnik M podpięty pod ten sam port na odbiorniku IR co silniki od podnoszenia wysięgnika, z silnika wychodzi ośka ze ślimakiem, ślimak napędza sprzęgło z24, do którego podpięte są dźwigniki przechyłu kabiny. Działa poprawnie.



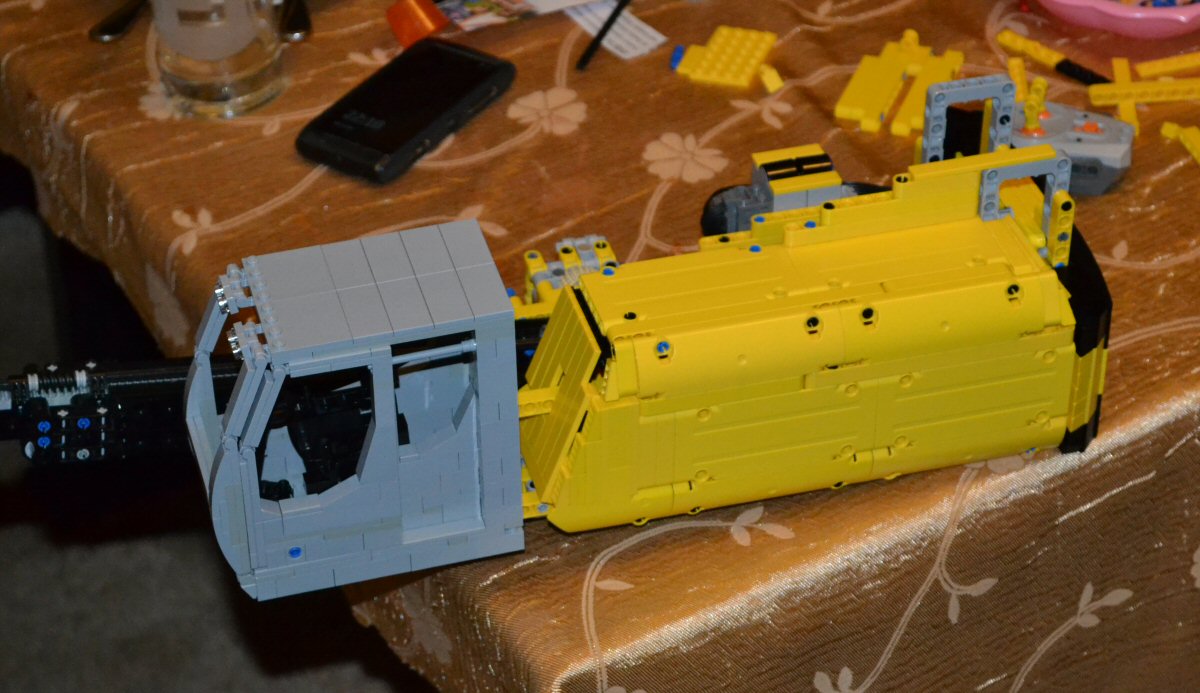
Lewa strona nadwozia została zabudowana panelami, prawa zaś głównie brickami i szarymi kafelkami.
Tak oto powstała konstrukcja trafiła na podwozie, kilka dodatkowych pieszczot i tak oto powstał gotowy model:
















PODSUMOWANIE
Ufff... udało się zakończyć i model i recenzje. Gratulacje dla tych, którzy przebrnęli przez całą lekturę :)
Model w mojej ocenie prezentuje się całkiem ładnie, w szczególności nadwozie, przy którym miałem okazję się w jakimś stopniu wykazać (kabina, wysięgnik, zabudowa bryły).
To chyba pierwszy model, który tyle razy przebudowywałem. Pomimo faktu, iż wszystkie funkcje podwozia działają poprawnie to jednak bym je przebudował na konstrukcję w oparciu o dziurawe bricki. Podwozie ma grubość zaledwie 5-6 studów, pomimo wzmocnienia ramkami pod obciążeniem podwozia nieznacznie się odkształca. Niestety nie udało mi się bardziej wzmocnić konstrukcji podwozia, głównie przez to, że musiało się w nim zmieścić naprawdę sporo mechaniki.
Po raz kolejny jak zazwyczaj przy większych konstrukcji brakuje fabrycznych lego'wych dużych obrotnic oraz siłowników śrubowych, wtedy można posiłkować się albo niekoszernymi częściami albo budować toporne komponenty, które mimo wszystko będą spełniały swoją funkcję.
Cieszę się przede wszystkim, że udało się zbudować kołowe podwozie z teleskopowymi podporami oraz 4-sekcyjny wysięgnik.
Model jest oczywiście bawialny, jednak należy pamiętać o dużej bezwładności w pełni wyciągniętego wysięgnika.
To również pierwszy tak długo-terminowy projekt w moim wykonaniu. Dzięki niemu przeprosiłem się z MLcad'em, jak się okazało to dobre narzędzie do estymacji potrzebnych elementów do danej budowy.
To chyba tyle...
Zapraszam do GALERII oraz na FILM (UWAGA MALKONTENCI - długość filmu 8:24 min :)