[MOC] [MOC]Autonomiczny transporter gąsienicowy
: 2018-11-19, 17:58
Witam.
Prezentuję wam mój najnowszy moc: Autonomiczny czołg transportowy.
Praca nad modelem rozpoczęła się już rok temu, i trwała aż do maja, kiedy to model trafił na wystawę Lego w rzeszowskim muzeum pod nazwą Avis Ev3.
(Tymczasowo fotografia Darka, gdyż moje zdjęcia utknęły w starym komputerze)
Była to wersja dość niedopracowana i zbudowana w nieco innej stylistyce.
Po zakończeniu wystawy model trafił na półkę w oczekiwaniu na swojego kompana który miał być jego dopełnieniem, niestety ostatecznie zrezygnowałem z jego budowy. Zamiast tego Avis Ponownie trafił na warsztat do przebudowy. Zniknęły rury i asymetryczne lampy, a zamiast nich pojawiły się nieco inne detale, chciałem w ten sposób nadać mu trochę bardziej futurystyczny wygląd, z paru miejsc zniknęły też study.
Dodatkowo dodałem czujnik kolorów w podwoziu oraz poszerzona została przestrzeń załadunkowa Poza tym pojawiło się kilka zmian w bebechach by usprawnić działanie mechanizmów.

Ostatecznie model był gotowy końcem wakacji i przez trzy miesiące patrzył na mnie z półki niczym wyrzut sumienia w oczekiwaniu na publikację.
Pojazd nie jest wzorowany na prawdziwej bodź pochodzącej z gry maszynie, a przynajmniej nie świadomie, podczas budowy postawiłem na swoją własną wizję pojazdu.

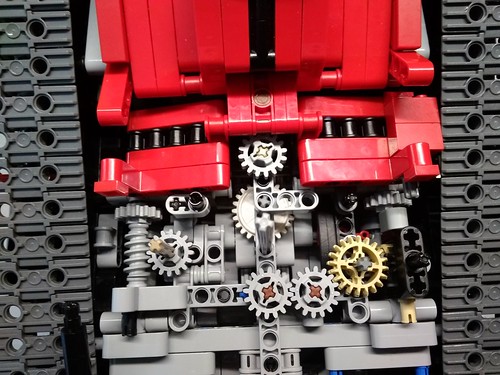
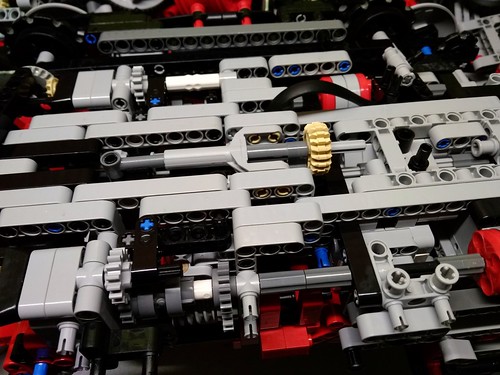
Zmotoryzowane funkcje obsługują trzy silniki, z czego dwie Lki operują napędem gąsienic bądź obrotem dźwigu i wyciągarką, zaś Mka rozkłada dźwig i w tym samym czasie przełącza Lki z napędzania gąsienic na sterowanie dźwigiem.
Takie rozwiązanie oprócz zalety jaką jest mniejsza liczba potrzebnych silników ma też sporą wadę jaką są równie spore luzy w mechanizmach.

Te zaś skutecznie utrudniają programowanie robota i tak na ten moment jeżeli chcę by model coś samodzielnie podniósł muszę go wcześniej wszystko obrócić maksymalnie w prawo tak by luzy były w pełni po jednej stronie gdy program ruszy, potem już sobie z nimi radzi.
Model w założeniu miał być w stanie samodzielnie odnaleźć a następnie załadować mindstormsowy pilot ir ostatecznie jest w stanie zrobić to wszystko, ale oddzielnie, niestety czujnik podczerwieni nie jest zbyt dokładny i model nie zawsze zatrzymuje się centralnie przed pilotem.
Ostatecznie najlepiej jest sterować robotem za pomocą Appki w telefonie, tym bardziej że taka perspektywa sterowania wydaje mi się dość kozacka :D

Koniec końców jestem umiarkowanie zadowolony z modelu, działa on poprawnie i wygląda nieźle, mam już w planach następny model więc już nie długo postoi na półce ;)
GALERIA
Mam nadzieję że wam się podobało, Cześć!
Ps.
Zastanawiałem się czy ten post nie bardziej pasowałby do działu technic, najwyżej moderatorzy będą narzekać że dokładam im roboty ;P
Prezentuję wam mój najnowszy moc: Autonomiczny czołg transportowy.
Praca nad modelem rozpoczęła się już rok temu, i trwała aż do maja, kiedy to model trafił na wystawę Lego w rzeszowskim muzeum pod nazwą Avis Ev3.
(Tymczasowo fotografia Darka, gdyż moje zdjęcia utknęły w starym komputerze)
Była to wersja dość niedopracowana i zbudowana w nieco innej stylistyce.
Po zakończeniu wystawy model trafił na półkę w oczekiwaniu na swojego kompana który miał być jego dopełnieniem, niestety ostatecznie zrezygnowałem z jego budowy. Zamiast tego Avis Ponownie trafił na warsztat do przebudowy. Zniknęły rury i asymetryczne lampy, a zamiast nich pojawiły się nieco inne detale, chciałem w ten sposób nadać mu trochę bardziej futurystyczny wygląd, z paru miejsc zniknęły też study.
Dodatkowo dodałem czujnik kolorów w podwoziu oraz poszerzona została przestrzeń załadunkowa Poza tym pojawiło się kilka zmian w bebechach by usprawnić działanie mechanizmów.
Ostatecznie model był gotowy końcem wakacji i przez trzy miesiące patrzył na mnie z półki niczym wyrzut sumienia w oczekiwaniu na publikację.
Pojazd nie jest wzorowany na prawdziwej bodź pochodzącej z gry maszynie, a przynajmniej nie świadomie, podczas budowy postawiłem na swoją własną wizję pojazdu.
Zmotoryzowane funkcje obsługują trzy silniki, z czego dwie Lki operują napędem gąsienic bądź obrotem dźwigu i wyciągarką, zaś Mka rozkłada dźwig i w tym samym czasie przełącza Lki z napędzania gąsienic na sterowanie dźwigiem.
Takie rozwiązanie oprócz zalety jaką jest mniejsza liczba potrzebnych silników ma też sporą wadę jaką są równie spore luzy w mechanizmach.
Te zaś skutecznie utrudniają programowanie robota i tak na ten moment jeżeli chcę by model coś samodzielnie podniósł muszę go wcześniej wszystko obrócić maksymalnie w prawo tak by luzy były w pełni po jednej stronie gdy program ruszy, potem już sobie z nimi radzi.
Model w założeniu miał być w stanie samodzielnie odnaleźć a następnie załadować mindstormsowy pilot ir ostatecznie jest w stanie zrobić to wszystko, ale oddzielnie, niestety czujnik podczerwieni nie jest zbyt dokładny i model nie zawsze zatrzymuje się centralnie przed pilotem.
Ostatecznie najlepiej jest sterować robotem za pomocą Appki w telefonie, tym bardziej że taka perspektywa sterowania wydaje mi się dość kozacka :D
Koniec końców jestem umiarkowanie zadowolony z modelu, działa on poprawnie i wygląda nieźle, mam już w planach następny model więc już nie długo postoi na półce ;)
GALERIA
Mam nadzieję że wam się podobało, Cześć!
Ps.
Zastanawiałem się czy ten post nie bardziej pasowałby do działu technic, najwyżej moderatorzy będą narzekać że dokładam im roboty ;P