Drugi raz w mojej praktyce budowlanej zainspirowało mnie zdjęcie modelu, a nie prawdziwej ciężarówki (nie widziałem Titana w takich kolorach i konfiguracji). Co prawda znalazłem później zdjęcia bardzo podobnej ciężarówki ale pierwotną inspiracją był ten model. Jest on wyposażony w HDS Palfinger 150002, czyli dość stary model, którego zdjęcia ciężko znaleźć w sieci. Dlatego wzorowałem się na dokumentacji technicznej wersji nowszej - PK165002, na temat którego jest masa informacji/zdjęć/filmów. Ramię starszej wersji jest bardziej kanciaste, przez co łatwiejsze do oddania w LEGO.
Byłem (a może nadal jestem?) mocno sceptyczny odnoście możliwości budowy dobrego HDSa z LEGO. Wiadomo, że nie damy rady zbudować tej ilości wysuwanych segmentów co w realu, ze względu na grubość ścianek... Ale jakąś próbę trzeba było podjąć i kiedy zobaczyłem ten model uznałem, że może się udać :)
Sam HDS wydaje się nieproporcjonalnie masywny ale jeśli zwrócimy uwagę na fakt, że w realu jest on zdolny podnieść ciężar 40 ton, to musi być solidny. Właśnie jego potężna budowa zachęciła mnie do podjęcia wyzwania przekładu na LEGO. Przy tej grubości ramienia można bowiem myśleć o estetycznym schowaniu w nim siłowników, kabli i węży :)
No i po raz kolejny mamy model nabity funkcjami do granic możliwości... Ale jakoś tak mam, że jak już buduję i widzę, że mam wolną przestrzeń, to wciskam tam kolejną funkcję. Ogólnie skala 1:17 jest sympatyczna, bo modele nie są ani za małe ani za duże. Można już zbliżyć się do realizmu w funkcjonalności (jak choćby z zawieszeniem i - tym razem - 8x8) ale zawsze coś się traci (a to prześwit, a to sztywność konstrukcji wymuszoną przez ruchome elementy).
Kabina.
Początkowo chciałem zbudować wojskową wersję Titana ale okazało się, że ciężko będzie znaleźć odpowiednie opony. Poza tym ma on mało funkcji, przez co zdecydowałem o przejściu na funkcjonalność i estetykę Optimusa Prime ;) Po zabawie w unikanie naklejek w kabinie CAT 434E zdecydowałem, że także w Mercedesie spróbuję oddać estetykę kabiny tylko przy użyciu klocków. Myślę, że wyszło nienajgorzej, zważywszy na to, że mamy tam fikuśne krzywizny grilla i białe paski na otwieranych drzwiach i masce. Zdecydowałem się też na szyby trans-black, żeby dać namiastkę realizmu, a także zamaskować flaki w kabinie. A jest co ukrywać, gdyż jest w niej 10 silników (3 x M, 1 x L, 6 x Serwo), 4 wieże, 7 przełączników, 3 kompresory i autozawór.
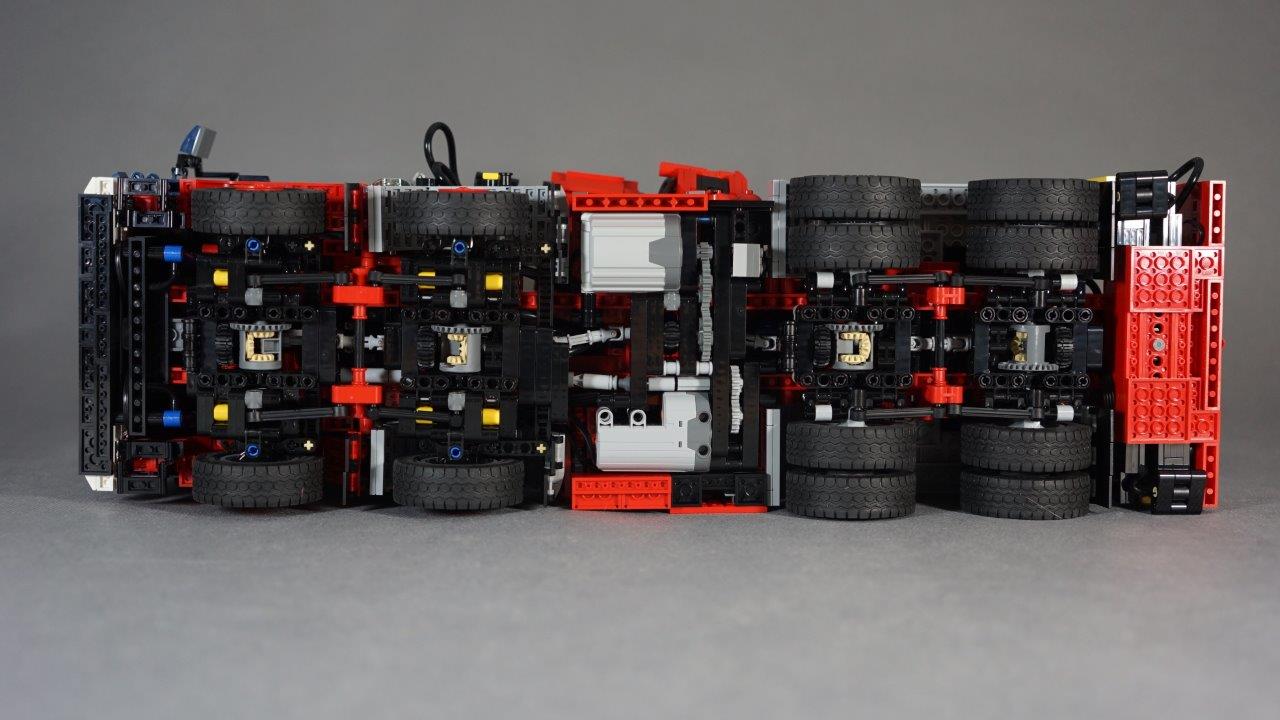
Rama i napęd.
Tradycyjnie dla skali 1:17 na 6 studów. Wykonana w technice: brick techniczny/2 płytki/brick techniczny. Pospinana w wielu miejscach w pionie liftami. Takie połączenie daje wystarczającą sztywność. Napęd (8x8) - XL, skręt (dwie pierwsze osie) - Serwo. Zawieszenie: mosty sztywne pływające (sierżanty na górze + drążki reakcyjne dolne).
Podpory.
Autorskie, wysokie na 3 study, szerokie na 3 płytki. Wysuwane mechanicznie (PF M + ślimak/z24 ze sprzęgłem/z8/rack), opuszczane pneumatycznie. Poruszają się w korpusie z paneli wysokich na 3 bricki. Bardzo lekko się suwają, pod warunkiem, że na górze mają płytki/kafle "with groove". Jeśli damy zwykłe płytki, to opór znacząco wzrasta. Początkowo chciałem użyć gotowych obejm z Arocsa ale okazało się, że ciężko byłoby do nich zamocować siłowniki, poza tym mają mniejszy wysuw i gorszą estetykę.
Tak jak w realu mamy 4 podpory, 2 z przodu i 2 z tyłu. Przednie po rozsunięciu muszą być jeszcze obrócone o 180 stopni żeby wysuwały się w dół (obok montażu linki wyciągarki jest to jedyna czynność, którą trzeba wykonać ręcznie, nie z pilota). Tylne są mocowane na sztywno i od razu wysuwają się w dół. Wszystkie podpory rozsuwają się na 11,5 studa.
W momencie opuszczania podpór sprzężone z nimi małe siłowniki pneumatyczne (po dwa na stronę) zmieniają polaryzację przełączników umieszczonych w kabinie (trzy przechodzą ze stanu 1 na 0, a trzy z 0 na 1). Wskutek czego 3 funkcje potrzebne podczas jazdy (napęd, skręt i rozsuwanie podpór) przestają działać, a 3 funkcje HDSa (podnoszenie ramienia, obrót ramienia i wyprost Fly-jib'a) zaczynają działać. W ten sposób można zdalnie sterować 11 funkcjami przy pomocy 8 kanałów systemu Power Functions.
HDS.
To niewątpliwie najtrudniejszy element całego modelu. Generalnie HDS jest to bardzo fajny patent. Nie ma aż tak dużego udźwigu jak tradycyjny dźwig/żuraw, jest za to bardziej uniwersalny (potrafi pracować tak i tak, czego nie zrobi żaden tradycyjny dźwig). Mój HDS ma 7 funkcji:
1. Obrót
2. Podnoszenie 2 sekcji
3. Wyprost 3 sekcji
4. Wysuw 4 i 5 sekcji
5. Wyprost 6 sekcji (Fly-jib)
6. Wysuw 7 sekcji (Fly-jib)
7. Wyciągarka
Do obsługi HDSa służy 11 siłowników pneumatycznych (6 grubych V2 i 5 cienkich, długich V2). Dodatkowo na ramieniu jest też oświetlenie w postaci 2 diod PF, skutkiem czego przez środek obrotnicy przechodzi 10 węży pneumatycznych i 2 kable PF. Z samą obrotnicą był problem, gdyż początkowo użyta brickowa okazała się rozpinać na skutek siły działającej na nią po rozłożeniu ramienia... Musiałem przejść na nową obrotnicę liftową (z60), co wymusiło zmiany w konstrukcji ramy. Ale nawet nowa obrotnica generowała takie tarcie, że konieczne było użycie smaru. Bez niego strzelały zębatki na styku z12/z60.
Największą trudnością w budowie było uzgodnienie geometrii ruchów w połączeniu z długością siłowników napędzających. Rzecz w tym, że HDS ma bardzo duże zakresy ruchu i żeby siłowniki były zdolne wybrać te zakresy muszą mieć system cięgien, który - na swoje potrzeby - nazywam ruchomym punktem podparcia. Jak wiadomo w realu długość cięgien i siłowników projektuje się według potrzeb, w LEGO musimy dostosować się do z góry zadanych elementów... No ale udało się, choć plastik, to nie stal (nie ta sztywność); a pneumatyka, to nie hydraulika (nie ta siła). Skutkiem czego widać, że ramię zachowuje w zasadzie pełną funkcjonalność (nie licząc kilkunastu segmentów wysuwu HDSa, no ale to z oczywistych przyczyn niemożliwe) ale klocki uginają się pod ciężarem, a udźwig jest symboliczny.
Najbardziej zadowolony jestem z Fly-jib'a, gdzie musiałem się ostro nagimnastykować żeby oddać zakres 180 stopni ruchu w połączeniu z ruchomymi elementami 4 i 5 sekcji (ścianki sekcji nie są tak cienkie jak w realu co mocno ogranicza zakres ruchu przy podwijaniu Fly-jib'a). Szkoda, że musiałem użyć grubych siłowników, ale na cienkich nie był on w stanie się do końca podwinąć. Ucierpiała estetyka ale mamy pełną funkcjonalność (nie licząc przeprostu jak w realu).
Wyciągarka napędzana mikromotorem jest wisienką na torcie HDSa - wiadomo, że udźwig jest symboliczny ale zasada działania jest oddana. Ze względów praktycznych linkę trzeba zakładać/zdejmować ręcznie żeby nie poplątała się przy składaniu/rozkładaniu HDSa.
Zmęczony już jestem tym modelem... Powstawał ponad rok. Oczywiście z przerwami, bo można było oszaleć :D Szczególne podziękowania kieruję do:
- eric trax, za bieżące komentowanie i wspieranie wysiłków budowlanych,
- axel (wraz z rodziną!), za dzielne znoszenie wizyt namolnego klienta sklepu BL,
- Auri, tradycyjnie za chromy,
Galeria.
Kilka zdjęć na zachętę:




Jest i film - na miarę moich możliwości psychologiczno-sprzętowych :)
[youtube]https://www.youtube.com/watch?v=STa1urD ... e=youtu.be[/youtube]
Zachęcam do komentowania. Chętnie odpowiem na wszelkie pytania. Wątek WIP zamykam.
=====
Zważyłem model - 4,9 kg (z bateriami).
Długość: 56 cm
Wysokość: 22 cm
Szerokość (bez rozsuniętych podpór): 16 cm