[MOC] Front Loader
: 2007-11-04, 19:18
Przez ostatni tydzień intensywnie dłubałem w dźwigu, na weekend postanowiłem zrobić sobie przerwę. Wyciągnąłem z niego elektrykę, trochę pneumatyki, i tak powstał kolejny BBT (Bardzo Brzydki Technic  )
)
Front Loader

Dane techniczne:
Masa: 1.415 kg
Wymiary: dł. 60s / szer. 20s / wys. 34 s
Napęd: 1 x PF XL przez 4-biegową skrzynię biegów na 4 koła
Skręcanie: 1 x PF (łamana rama)
Zawieszenie: przód brak / tył kolebkowe
Inne silniki: 2x PF w autozaworach
Pneumatyka: 2 niezależne obwody, każdy z własnym autozaworem i osobnym kompresorem, sterowane w całości przez IR
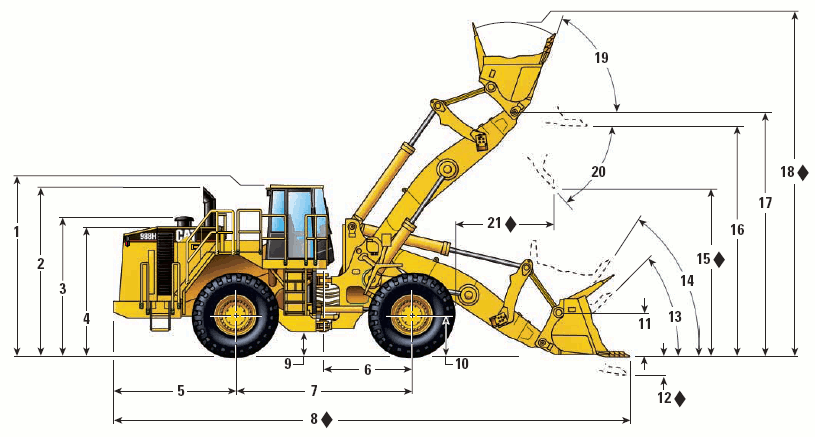
Z początku miał to być rozsądnie wierny model Caterpillara 988H, ale ponieważ budowałem dla relaksu, skupiłem się przede wszystkim na funkcjonalności wygląd traktując drugorzędnie. Efektem jest MOC bardzo funkcjonalny, i równie brzydki jak oryginał który wygląda tak:

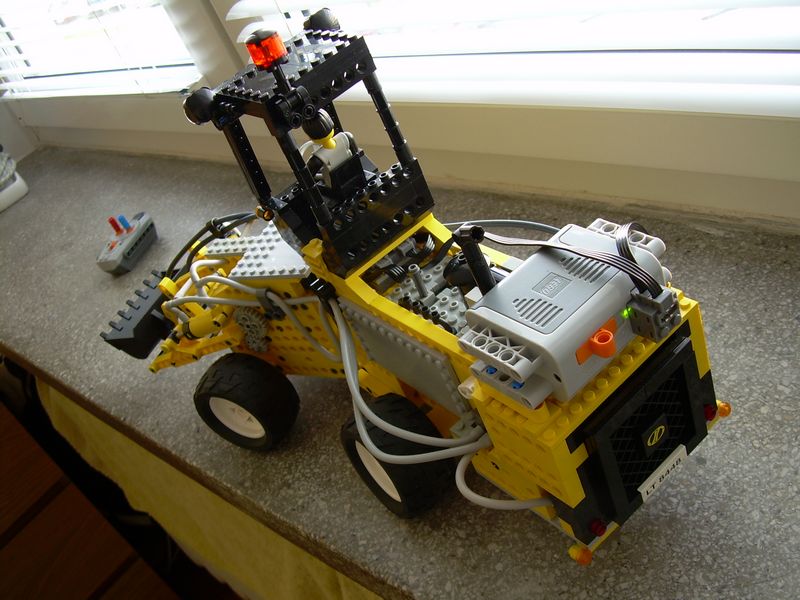
A to parę zdjęć mojego potworka





Jak wygląda każdy widzi, opiszę pokrótce co potrafi.
Korpus składa się z dwóch elementów połączonych dwiema obrotnicami - w efekcie uzyskujemy łamaną ramę. Muszę powiedzieć że sterowanie tak skręcanym pojazdem jest jeszcze przyjemniejsze niż się spodziewałem. W przedniej części ramy znajduje się silnik PF z całym układem skrętnym, oraz silnik PF XL który przez wał kardana przekazuje napęd do tylnej części. W niej z kolei znajduje się 4-biegowa skrzynia biegów według pomysłu Erika Leppena, w wersji liftarmowej którą pokazywałem niedawno. Mieszczą się tam również odbiorniki IR, battery box oraz 2 silniki PF z których każdy napędza niezależny kompresor za pośrednictwem autozaworu - również według pomysłu który ostatnio pokazywałem. Ponieważ ładowarka ma 2 obwody pneumatyczne, konieczne było użycie dwóch autozaworów, natomiast dwa małe kompresory okazały się dostatecznie wydajne niż jeden duży, który wymagałby połączenia autozaworów sumatorem i zabrał znacznie więcej miejsca.
Eksperymentowałem także z ustawieniem odbiorników IR - jeden widać z tyłu, drugi schowany jest pod siedzeniem kierowcy. Nie polecam takiego rozwiązania, mimo że odbiornik nie jest zabudowany trzeba dokładnie celować pilotem w kabinę żeby nie gubił sygnału.
Układ napędowy był jednym z dwóch największych wyzwań - na czwartym biegu ładowarka nieźle śmiga, i było naprawdę trudno złożyć wszystko w taki sposób żeby silnik nie rozwalił mechaniki, i żeby zostało jeszcze trochę miejsca do wykorzystania. Zawieszenie jest dokładną kopią zawieszenia ładowarki Caterpillara - z przodu sztywna oś, z tyłu kolebka.
Drugim dużym wyzwaniem była geometria ramienia. Ładowarki Caterpillara - i pewnie także innych marek - mają dość specyficznie skonstruowane ramię, które po bliższym zbadaniu okazuje się mieć bardzo ciekawe właściwości.

Mamy tu dwa zespoły siłowników: jeden podnosi i opuszcza całe ramię, drugi samą łopatę. Trick polega na tym, że razem tworzą pewien układ dźwigni - taki, że podczas podnoszenia i opuszczania ramienia łopata cały czas zachowuje takie nachylenie jakie jej nadano drugim zespołem siłowników.
Przeniesienie tego na klocki wymagało trochę kombinowania ponieważ siłowniki Lego są sporo krótsze. Ale udało mi się, i to nawet zyskując bardzo duży zakres ruchu ramienia:
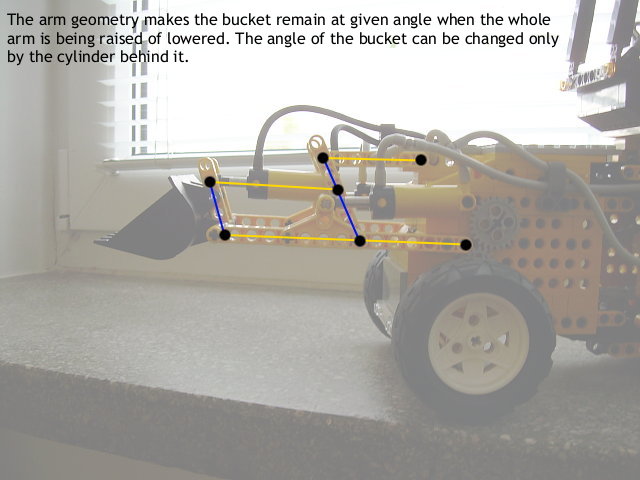
Po prawej stronie mamy układ dźwigni równoległych - dźwignie oznaczone na żółto będą równoległe niezależnie od uniesienia całego ramienia, ponieważ są parami równej długości - mówiąc prościej, tworzą prostokąt. Dzięki temu niebieska pionowa dźwignia pośrodku ramienia będzie zawsze ustawiona pod tym samym kątem, nieważne jak podniesione jest ramię. A ponieważ na niej osadzony jest siłownik przechylający łopatę, więc także łopata będzie utrzymywana stale pod tym samym kątem, z tą różnicą że jej nachylenie można w każdej chwili zmienić wspomnianym siłownikiem. Brzmi to pokrętnie, dlatego najlepiej zobaczyć to w akcji:
Film pokazujący wszystkie funkcje modelu:
[youtube]http://youtube.com/watch?v=ealWxw1mGf0[/youtube]
Proszę o komentarze. Wiem że model jest brzydki, ale jak wspomniałem wygląd nie był tu priorytetem. Mimo upchnięcia tak dużej liczby funkcji wciąż zachowuje pewne podobieństwo do ładowarki Caterpillara - choćby w kolorze i kształcie kabiny, za to oczywiście za małe są koła ale nie mam żadnych pasujących większych. Zmieszczenie tylu mechanizmów w niezbyt dużym modelu, tak żeby wszystko sprawnie działało i znosiło naprężenia generowane przez nowe silniki uważam za jakieś osiągnięcie. Zanim skrytykujecie wygląd, obejrzyjcie proszę film
Galeria
Zdjęcia na zachętę:
Ramię maksymalnie podniesione...

...i maksymalnie opuszczone - jest w stanie podnieść przednie koła

Skrzynia biegów

Tylne zawieszenie w akcji

Tylne żaluzje przez które widać kompresory i zwoje kabli

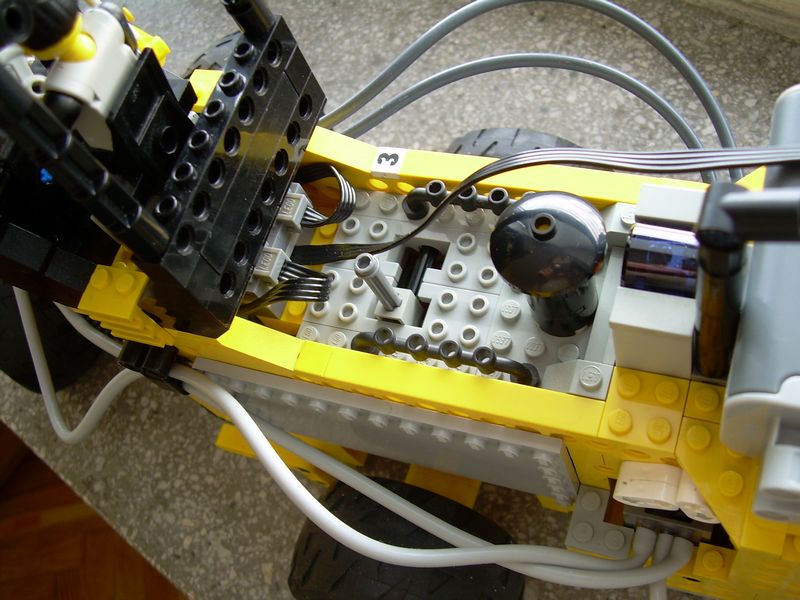
Rzut okiem do środka

Pan kierowca patrzy na nas z wysoka

Z nadejściem zmierzchu ładowarki wychodzą na żer...

Front Loader
Dane techniczne:
Masa: 1.415 kg
Wymiary: dł. 60s / szer. 20s / wys. 34 s
Napęd: 1 x PF XL przez 4-biegową skrzynię biegów na 4 koła
Skręcanie: 1 x PF (łamana rama)
Zawieszenie: przód brak / tył kolebkowe
Inne silniki: 2x PF w autozaworach
Pneumatyka: 2 niezależne obwody, każdy z własnym autozaworem i osobnym kompresorem, sterowane w całości przez IR
Z początku miał to być rozsądnie wierny model Caterpillara 988H, ale ponieważ budowałem dla relaksu, skupiłem się przede wszystkim na funkcjonalności wygląd traktując drugorzędnie. Efektem jest MOC bardzo funkcjonalny, i równie brzydki jak oryginał który wygląda tak:
A to parę zdjęć mojego potworka




Jak wygląda każdy widzi, opiszę pokrótce co potrafi.
Korpus składa się z dwóch elementów połączonych dwiema obrotnicami - w efekcie uzyskujemy łamaną ramę. Muszę powiedzieć że sterowanie tak skręcanym pojazdem jest jeszcze przyjemniejsze niż się spodziewałem. W przedniej części ramy znajduje się silnik PF z całym układem skrętnym, oraz silnik PF XL który przez wał kardana przekazuje napęd do tylnej części. W niej z kolei znajduje się 4-biegowa skrzynia biegów według pomysłu Erika Leppena, w wersji liftarmowej którą pokazywałem niedawno. Mieszczą się tam również odbiorniki IR, battery box oraz 2 silniki PF z których każdy napędza niezależny kompresor za pośrednictwem autozaworu - również według pomysłu który ostatnio pokazywałem. Ponieważ ładowarka ma 2 obwody pneumatyczne, konieczne było użycie dwóch autozaworów, natomiast dwa małe kompresory okazały się dostatecznie wydajne niż jeden duży, który wymagałby połączenia autozaworów sumatorem i zabrał znacznie więcej miejsca.
Eksperymentowałem także z ustawieniem odbiorników IR - jeden widać z tyłu, drugi schowany jest pod siedzeniem kierowcy. Nie polecam takiego rozwiązania, mimo że odbiornik nie jest zabudowany trzeba dokładnie celować pilotem w kabinę żeby nie gubił sygnału.
Układ napędowy był jednym z dwóch największych wyzwań - na czwartym biegu ładowarka nieźle śmiga, i było naprawdę trudno złożyć wszystko w taki sposób żeby silnik nie rozwalił mechaniki, i żeby zostało jeszcze trochę miejsca do wykorzystania. Zawieszenie jest dokładną kopią zawieszenia ładowarki Caterpillara - z przodu sztywna oś, z tyłu kolebka.
Drugim dużym wyzwaniem była geometria ramienia. Ładowarki Caterpillara - i pewnie także innych marek - mają dość specyficznie skonstruowane ramię, które po bliższym zbadaniu okazuje się mieć bardzo ciekawe właściwości.
Mamy tu dwa zespoły siłowników: jeden podnosi i opuszcza całe ramię, drugi samą łopatę. Trick polega na tym, że razem tworzą pewien układ dźwigni - taki, że podczas podnoszenia i opuszczania ramienia łopata cały czas zachowuje takie nachylenie jakie jej nadano drugim zespołem siłowników.
Przeniesienie tego na klocki wymagało trochę kombinowania ponieważ siłowniki Lego są sporo krótsze. Ale udało mi się, i to nawet zyskując bardzo duży zakres ruchu ramienia:
Po prawej stronie mamy układ dźwigni równoległych - dźwignie oznaczone na żółto będą równoległe niezależnie od uniesienia całego ramienia, ponieważ są parami równej długości - mówiąc prościej, tworzą prostokąt. Dzięki temu niebieska pionowa dźwignia pośrodku ramienia będzie zawsze ustawiona pod tym samym kątem, nieważne jak podniesione jest ramię. A ponieważ na niej osadzony jest siłownik przechylający łopatę, więc także łopata będzie utrzymywana stale pod tym samym kątem, z tą różnicą że jej nachylenie można w każdej chwili zmienić wspomnianym siłownikiem. Brzmi to pokrętnie, dlatego najlepiej zobaczyć to w akcji:
Film pokazujący wszystkie funkcje modelu:
[youtube]http://youtube.com/watch?v=ealWxw1mGf0[/youtube]
Proszę o komentarze. Wiem że model jest brzydki, ale jak wspomniałem wygląd nie był tu priorytetem. Mimo upchnięcia tak dużej liczby funkcji wciąż zachowuje pewne podobieństwo do ładowarki Caterpillara - choćby w kolorze i kształcie kabiny, za to oczywiście za małe są koła ale nie mam żadnych pasujących większych. Zmieszczenie tylu mechanizmów w niezbyt dużym modelu, tak żeby wszystko sprawnie działało i znosiło naprężenia generowane przez nowe silniki uważam za jakieś osiągnięcie. Zanim skrytykujecie wygląd, obejrzyjcie proszę film
Galeria
Zdjęcia na zachętę:
Ramię maksymalnie podniesione...

...i maksymalnie opuszczone - jest w stanie podnieść przednie koła

Skrzynia biegów
Tylne zawieszenie w akcji

Tylne żaluzje przez które widać kompresory i zwoje kabli

Rzut okiem do środka

Pan kierowca patrzy na nas z wysoka

Z nadejściem zmierzchu ładowarki wychodzą na żer...


