[MOC] Mój pierwszy raz
: 2008-11-09, 22:19
Stało się. Kiedyś trzeba zamieścić pierwszy opis, zebrać baty i zabrać się do pracy, by budować lepiej. Otóż dzisiaj mam do przedstawienia w zasadzie pracę, którą możnaby zatytułować "dwa w jednym".
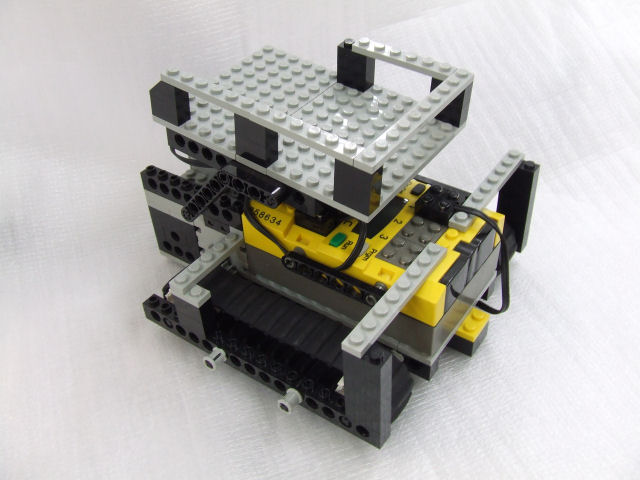
Pierwszym elementem jest pojazd - wywrotka. 2 silniczki napędzające gąsienice + 1 silniczek napędzający część ładunkową. Użyty dodatkowo sensor optyczny - ten pojazd to klasyczny line-follower. Konstrukcja dość prosta, no ale dopiero uczymy się ładnie budować :).
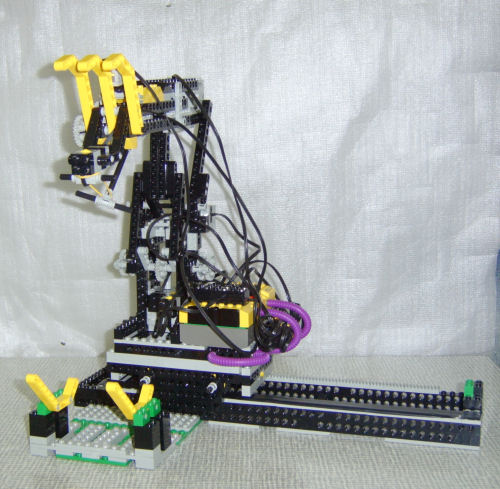
Drugi element to dźwig - łapa. Dźwig może jeździć po specjalnym "torze" w prawo i w lewo. Ramię jest opuszczane i szczęki łapy mogą się zaciskać. Każda z tych funkcji ruchu wykorzystuje 1 silniczek. Tutaj sensorów dotyku jest użytych 6 - 2 z nich kontrolują położenie krańcowe na torze, 2 kontrolują nachylenie ramienia i 2 kontrolujące zaciśnięcie/rozluźnienie szczęk.
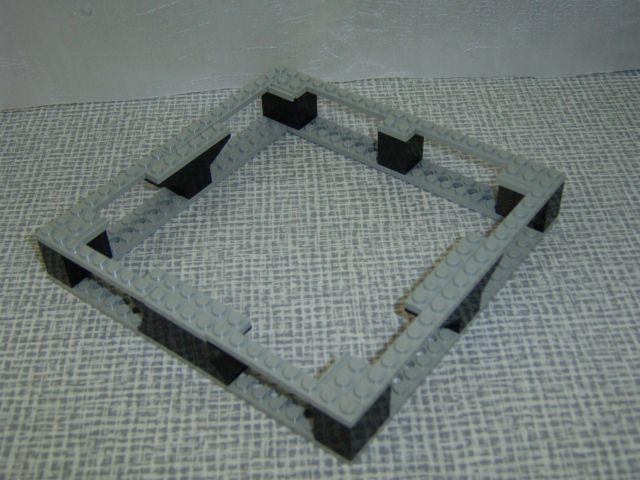
A to element bonusowy - koszyczek alias punkt zrzutu :P.
A teraz krótki opis, co to ma robić.
Otóż oba pojazdy korzystają z komunikacji między sobą. Zadanie systemu wygląda tak: Pojazd stoi w położeniu startowym. Wysyła komunikat do dźwigu, który jest interpretowany jako gotowość do załadunku. Dźwig opuszcza łapę, zabiera element ze stojaka, jedzie na drugi koniec toru i załadowuje element na pojazd. Pojazd po otrzymaniu potwierdzenia załadunku od dźwigu przemierza wyznaczoną trasę i zrzuca do wspomnianego koszyczka to, co transportuje. Następnie wraca pod dźwig i wysyła komunikat o gotowości. I tak to się kręci. Powstała też wersja oprogramowania z limitowaną ilością pętli (mamy skończoną ilość elementów do transportu).
Czekam z niecierpliwością na krytykę i komentarze.
Galeria z brickshelfa jest tu: http://www.brickshelf.com/cgi-bin/gallery.cgi?f=351302
Filmik na youtube pokazujący robota w akcji: http://pl.youtube.com/watch?v=QJki0Le7Pxc
Pierwszym elementem jest pojazd - wywrotka. 2 silniczki napędzające gąsienice + 1 silniczek napędzający część ładunkową. Użyty dodatkowo sensor optyczny - ten pojazd to klasyczny line-follower. Konstrukcja dość prosta, no ale dopiero uczymy się ładnie budować :).
Drugi element to dźwig - łapa. Dźwig może jeździć po specjalnym "torze" w prawo i w lewo. Ramię jest opuszczane i szczęki łapy mogą się zaciskać. Każda z tych funkcji ruchu wykorzystuje 1 silniczek. Tutaj sensorów dotyku jest użytych 6 - 2 z nich kontrolują położenie krańcowe na torze, 2 kontrolują nachylenie ramienia i 2 kontrolujące zaciśnięcie/rozluźnienie szczęk.
A to element bonusowy - koszyczek alias punkt zrzutu :P.
A teraz krótki opis, co to ma robić.
Otóż oba pojazdy korzystają z komunikacji między sobą. Zadanie systemu wygląda tak: Pojazd stoi w położeniu startowym. Wysyła komunikat do dźwigu, który jest interpretowany jako gotowość do załadunku. Dźwig opuszcza łapę, zabiera element ze stojaka, jedzie na drugi koniec toru i załadowuje element na pojazd. Pojazd po otrzymaniu potwierdzenia załadunku od dźwigu przemierza wyznaczoną trasę i zrzuca do wspomnianego koszyczka to, co transportuje. Następnie wraca pod dźwig i wysyła komunikat o gotowości. I tak to się kręci. Powstała też wersja oprogramowania z limitowaną ilością pętli (mamy skończoną ilość elementów do transportu).
Czekam z niecierpliwością na krytykę i komentarze.
Galeria z brickshelfa jest tu: http://www.brickshelf.com/cgi-bin/gallery.cgi?f=351302
Filmik na youtube pokazujący robota w akcji: http://pl.youtube.com/watch?v=QJki0Le7Pxc