[MOC] Forklift PF
: 2008-11-16, 20:38
W przerwie od czarnych MOCy...
Forklift PF

Dane techniczne:
Wymiary: dł. 62 s (z widelcem) / szer. 28 s / wys. 18 s
Waga: 1.48 kg
Zawieszenie: pełne niezależne
Napęd: PF Medium na tylną oś przez nowy dyferencjał
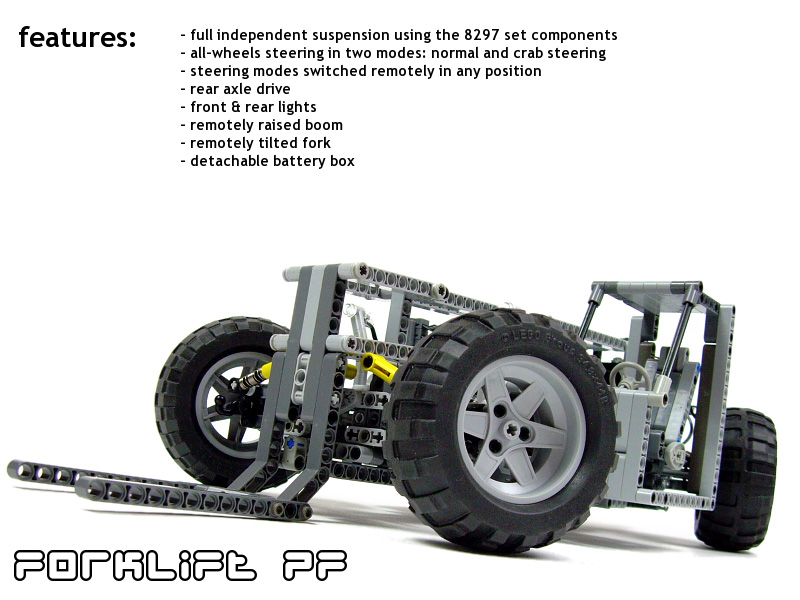
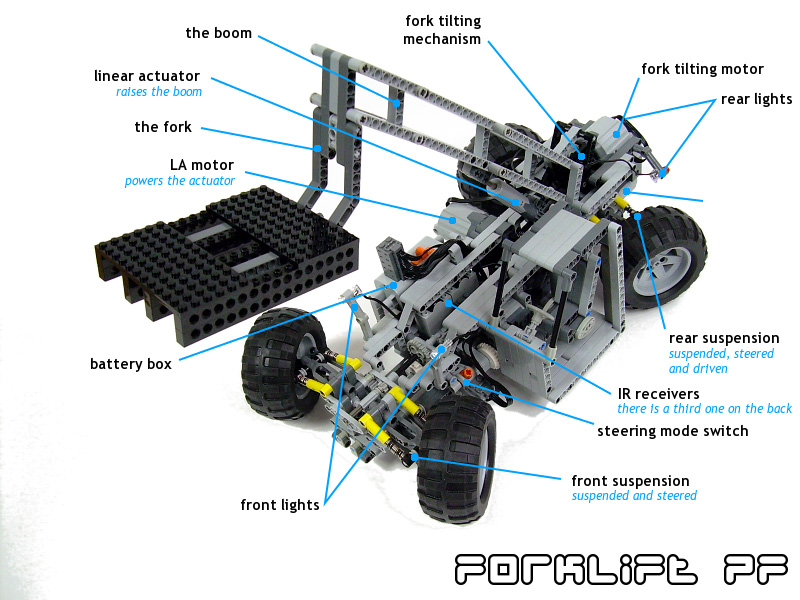
Inne: bom podnoszony PF XLem i siłownikiem śrubowym, widelec przechylany PF XLem, skręt dwoma PF Mediumami, zmiana trybu skrętu PF Mediumem, przednie i tylne światła
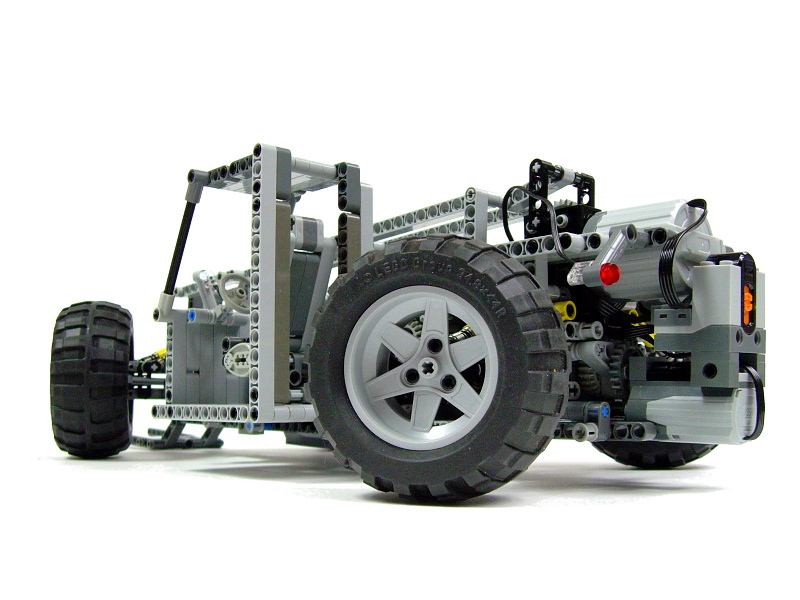
To, co widzicie jest wózkiem widłowym typu bezmasztowego, czyli z ramieniem. Wiem, że wygląda jak telehandler, ale różni się od niego brakiem możliwości wysuwania ramienia. Zawsze chętnie pokłócę się o klasyfikację :)
Co jakiś czas spotykam się z pytaniem, skąd mi się bierze tyle pomysłów, i ten MOC jest dobrym przykładem, bo powstał jako połączenie kilku koncepcji. Najpierw chciałem wypróbować elementy zawieszenia z 8297 w wersji "full opcja", czyli z zawieszeniem, napędem i skrętem jednocześnie, czego w 8297 jak wiemy nie ma. Kół 94 mm nie zamierzałem używać, ale okazały się konieczne dla odpowiedniego prześwitu. Potem pomyślałem, że z nowymi switchami PF da się łatwo zrobić pojazd ze sterowaniem na wszystkie koła przełączanym z trybu normalnego na krabowy. Próbowałem już czegoś takiego przełączanego mechanicznie, ale z kiepskim skutkiem - switch pozwala przełączać tryby elektrycznie. No i wreszcie przyszło mi do głowy, że z siłownikami śrubowymi można zrobić coś, czego z pneumatyką się nie dało - naciskać na nie innym mechanizmem. I że jeśli zastosować to w ramieniu z równoległych dźwigni, to wyszedłby fajny system podnoszenia ramienia i poziomowania wideł. Połączeniem tych pomysłów jest właśnie niniejszy wózek.
W ramach ćwiczeń uparłem się zbudować go z samych liftarmów, więc o jakiejś wysmakowanej estetyce nie było mowy. Skupiłem się na funkcjach, a zanim ponarzekacie na wygląd, doceńcie że wózek przynajmniej nie jest czarny :P
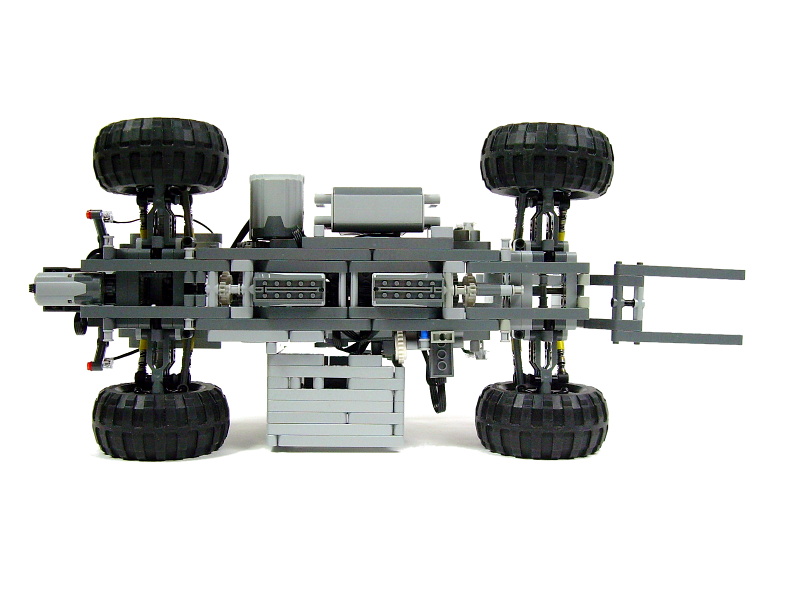
Wypróbowałem w nim własny moduł zawieszenia, z przodu w wersji bez napędu - napęd na tył wystarcza, a odpada konieczność ciągnięcia wału napędowego przez całe podwozie, dodatkowe miejsce z przodu pozwala natomiast umieścić widelec niżej i bliżej nadwozia. Jak się spisuje zawieszenie to zobaczycie w filmie, chociaż ze wstydem przyznaję, że po przeszkodach nie jeździłem - wózek ma za niskie podwozie i za słaby silnik do napędu żeby się bawić w off-road. Skręt obsługują dwa silniki, osobno dla przodu i tyłu. Oba są podłączone pod jedno wyjście z odbiornika IR, ale tylny za pośrednictwem switcha. Przełączanie między normalnym a krabowym trybem skrętu działa świetnie, można je wykonać w każdym momencie i każdym ustawieniu kół, dzięki użyciu sprzęgieł przy obu silnikach. Pozwala to wyrównać koła skręcając je do oporu.

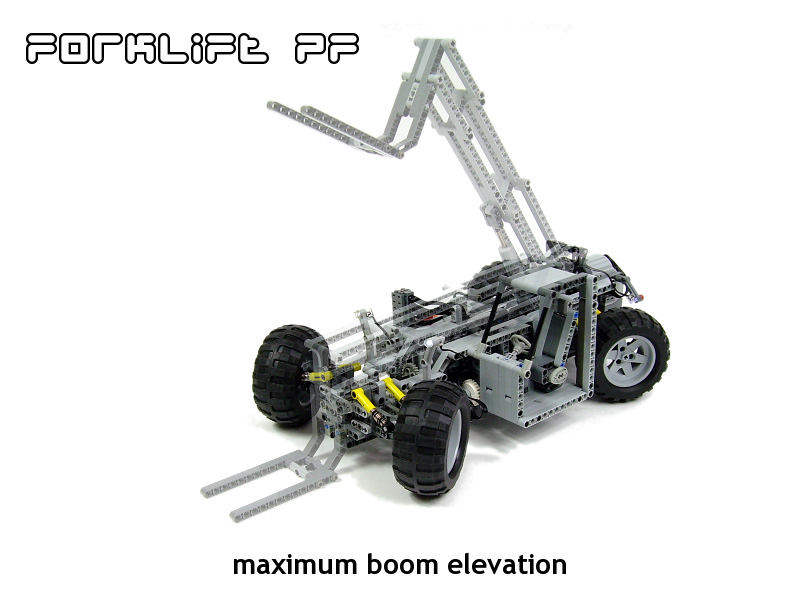
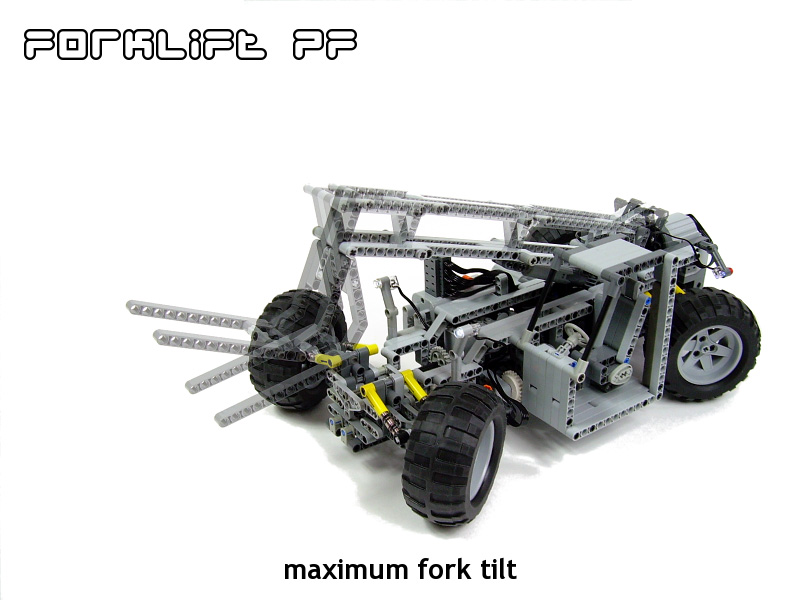
Ramię podnosi jeden siłownik śrubowy napędzany PF XLem. Dzięki użyciu dwóch równoległych dźwigni, widelec zachowuje swoje nachylenie podczas podnoszenia. Można je w każdej chwili zmienić drugim PF XLem, przez ślimacznicę. Zamierzałem wykorzystać do tego drugi siłownik, ale się nie zmieścił. W każdym razie to jest właśnie coś, co nie było możliwe z pneumatyką - oba te mechanizmy naciskają na siebie kiedy zmieniają ustawienie ramienia. Pneumatyka by się w takiej sytuacji uginała, siłownik śrobowy tego nie robi.
Maksymalny ciężar jaki udało mi się bezpiecznie podnieść to ok. 200 gramów. Powyżej tej wartości zaczynają się problemy z zębatkami między siłownikiem śrubowym a silnikiem. Dałoby się to poprawić przy gruntownej przebudowie, i ewentualnym dodaniu drugiego siłownika, ale przyznaję że bardziej mnie interesowało działanie mechaniki skrętu niż wyczynowe podnoszenie ciężarów.
Zadbałem o trochę ujęć z kamery na nadwoziu na filmie, i dopieściłem jasność zdjęć żeby V1 był zadowolony. Ciekaw jestem Waszych opinii, tego jak Wam się spodoba MOC, którego wygląd jest w 100% podytkowany funkcjonalnością. I który nie jest czarny ;)
Galeria
Przykładowe zdjęcia:










Film:
[youtube]http://www.youtube.com/watch?v=GKjbdTzfq5g[/youtube]
Forklift PF
Dane techniczne:
Wymiary: dł. 62 s (z widelcem) / szer. 28 s / wys. 18 s
Waga: 1.48 kg
Zawieszenie: pełne niezależne
Napęd: PF Medium na tylną oś przez nowy dyferencjał
Inne: bom podnoszony PF XLem i siłownikiem śrubowym, widelec przechylany PF XLem, skręt dwoma PF Mediumami, zmiana trybu skrętu PF Mediumem, przednie i tylne światła
To, co widzicie jest wózkiem widłowym typu bezmasztowego, czyli z ramieniem. Wiem, że wygląda jak telehandler, ale różni się od niego brakiem możliwości wysuwania ramienia. Zawsze chętnie pokłócę się o klasyfikację :)
Co jakiś czas spotykam się z pytaniem, skąd mi się bierze tyle pomysłów, i ten MOC jest dobrym przykładem, bo powstał jako połączenie kilku koncepcji. Najpierw chciałem wypróbować elementy zawieszenia z 8297 w wersji "full opcja", czyli z zawieszeniem, napędem i skrętem jednocześnie, czego w 8297 jak wiemy nie ma. Kół 94 mm nie zamierzałem używać, ale okazały się konieczne dla odpowiedniego prześwitu. Potem pomyślałem, że z nowymi switchami PF da się łatwo zrobić pojazd ze sterowaniem na wszystkie koła przełączanym z trybu normalnego na krabowy. Próbowałem już czegoś takiego przełączanego mechanicznie, ale z kiepskim skutkiem - switch pozwala przełączać tryby elektrycznie. No i wreszcie przyszło mi do głowy, że z siłownikami śrubowymi można zrobić coś, czego z pneumatyką się nie dało - naciskać na nie innym mechanizmem. I że jeśli zastosować to w ramieniu z równoległych dźwigni, to wyszedłby fajny system podnoszenia ramienia i poziomowania wideł. Połączeniem tych pomysłów jest właśnie niniejszy wózek.
W ramach ćwiczeń uparłem się zbudować go z samych liftarmów, więc o jakiejś wysmakowanej estetyce nie było mowy. Skupiłem się na funkcjach, a zanim ponarzekacie na wygląd, doceńcie że wózek przynajmniej nie jest czarny :P
Wypróbowałem w nim własny moduł zawieszenia, z przodu w wersji bez napędu - napęd na tył wystarcza, a odpada konieczność ciągnięcia wału napędowego przez całe podwozie, dodatkowe miejsce z przodu pozwala natomiast umieścić widelec niżej i bliżej nadwozia. Jak się spisuje zawieszenie to zobaczycie w filmie, chociaż ze wstydem przyznaję, że po przeszkodach nie jeździłem - wózek ma za niskie podwozie i za słaby silnik do napędu żeby się bawić w off-road. Skręt obsługują dwa silniki, osobno dla przodu i tyłu. Oba są podłączone pod jedno wyjście z odbiornika IR, ale tylny za pośrednictwem switcha. Przełączanie między normalnym a krabowym trybem skrętu działa świetnie, można je wykonać w każdym momencie i każdym ustawieniu kół, dzięki użyciu sprzęgieł przy obu silnikach. Pozwala to wyrównać koła skręcając je do oporu.
Ramię podnosi jeden siłownik śrubowy napędzany PF XLem. Dzięki użyciu dwóch równoległych dźwigni, widelec zachowuje swoje nachylenie podczas podnoszenia. Można je w każdej chwili zmienić drugim PF XLem, przez ślimacznicę. Zamierzałem wykorzystać do tego drugi siłownik, ale się nie zmieścił. W każdym razie to jest właśnie coś, co nie było możliwe z pneumatyką - oba te mechanizmy naciskają na siebie kiedy zmieniają ustawienie ramienia. Pneumatyka by się w takiej sytuacji uginała, siłownik śrobowy tego nie robi.
Maksymalny ciężar jaki udało mi się bezpiecznie podnieść to ok. 200 gramów. Powyżej tej wartości zaczynają się problemy z zębatkami między siłownikiem śrubowym a silnikiem. Dałoby się to poprawić przy gruntownej przebudowie, i ewentualnym dodaniu drugiego siłownika, ale przyznaję że bardziej mnie interesowało działanie mechaniki skrętu niż wyczynowe podnoszenie ciężarów.
Zadbałem o trochę ujęć z kamery na nadwoziu na filmie, i dopieściłem jasność zdjęć żeby V1 był zadowolony. Ciekaw jestem Waszych opinii, tego jak Wam się spodoba MOC, którego wygląd jest w 100% podytkowany funkcjonalnością. I który nie jest czarny ;)
Galeria
Przykładowe zdjęcia:





Film:
[youtube]http://www.youtube.com/watch?v=GKjbdTzfq5g[/youtube]