[MOC] Sterowanie silnikami PF przez NXT
: 2009-02-02, 17:33
Jakiś czas temu HiTechnic zaczął sprzedawać nowy czujnik do NXT - IR Link. Ukazał się też blok programowy do NXT-G, który pozwala na sterowanie prędkością silników za pomocą sensora IR Link. Postanowiłem to wypróbować.
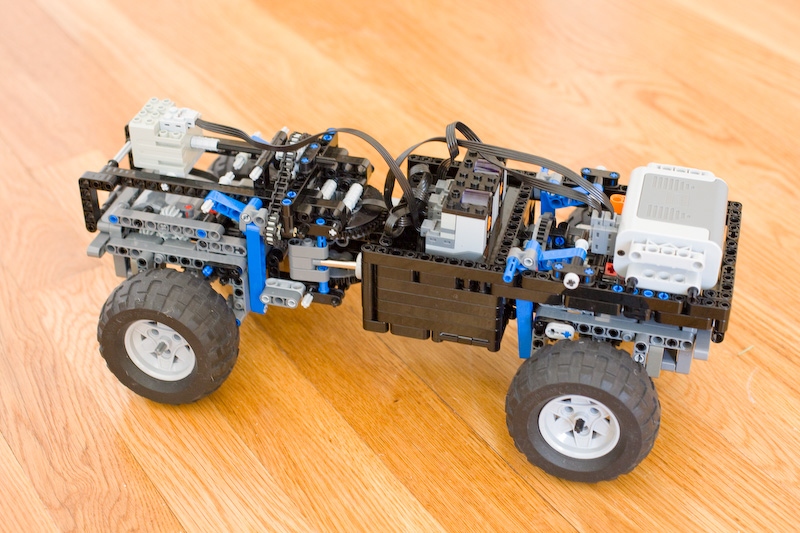
Zbudowałem proste podwozie ciężarówki, które w założeniu miało stać się kiedyś pełnowymiarową trialówką (Ale tak się nie stanie bo nie mam czasu by to skończyć a poza tym mam plany budowy czegoś ciekawszego). Podwozie ma dwie kolebki, każda z własnym silnikiem PF XL, zawieszone z jednej strony na obrotnicy. Skręcanie odbywa się jak w ciężarówkach z łamaną ramą. Aby usztywnić całość, osią skrętu są dwie obrotnice umieszczone jedna nad drugą [1]. Skręt jest kontrolowany za pomocą dwóch siłowników śrubowych napędzanych przez dwa silniki PF Medium [2]. Ponieważ taka konstrukcja wymaga dyferencjałów w mostach (inaczej skręcać nie będzie) to każdy z tych dyferencjałów ma blokadę (dla lepszej sprawności w terenie) [3] i obie blokady są sterowane zdalnie za pomocą wału biegnącego przez całą długość pojazdu. Wał ten napędzany jest łańcuchem ze starego silnika 9V. Tyle o podwoziu.

Sterownikiem jest kostka NXT z jednym silnikiem NXT służącym jako przepustnica i dwoma czujnikami dotyku służącymi jako przełączniki do skręcania w prawo i w lewo. Oczywiście można to zbudować inaczej. Do kostki NXT podłączony jest też oczywiście czujnik IR Link.
W teorii za pomoca jednej kostki NXT i jednego czujnika IR Link można kontrolować prędkość 8 silników PF (używając wszystkich 4 kanałów obiorników IR PF, po 2 silniki na odbiornik). No i najważniejsze, że sterowanie prędkością tych silników nie stanowi problemu.
W praktyce da się to zrobić ale są oczywiście pewne wady tego rozwiązania:
- do każdego modelu potrzeba aż 12 baterii AA (6 do battery boxa i 6 do NXT)
- trzeba mieć zestaw NXT (choć nie wiem czy to akurat wada)
- nadajnik podczerwieni w czujniku IR Link nie jest tak dobry jak nadajnik w standardowym pilocie IR PF (łatwiej gubi sygnał)
Kiedyś będę musiał wypróbować odwrotne rozwiązanie - sterowanie samochodem zasilanym z kostki NXT przez standardowy pilot IR PF. Pozwoliłoby to na wyposażenie modelu w różnego rodzaju czujniki choć niestety model będzie musiał dźwigać na sobie cały komputer NXT a ten do małych nie należy.
Poniżej poglądowy filmik. Więcej fotek w galerii.
[youtube]http://www.youtube.com/watch?v=wXAI3GlorAw[/youtube]
Zamieściłem też przykładowy program.
Zbudowałem proste podwozie ciężarówki, które w założeniu miało stać się kiedyś pełnowymiarową trialówką (Ale tak się nie stanie bo nie mam czasu by to skończyć a poza tym mam plany budowy czegoś ciekawszego). Podwozie ma dwie kolebki, każda z własnym silnikiem PF XL, zawieszone z jednej strony na obrotnicy. Skręcanie odbywa się jak w ciężarówkach z łamaną ramą. Aby usztywnić całość, osią skrętu są dwie obrotnice umieszczone jedna nad drugą [1]. Skręt jest kontrolowany za pomocą dwóch siłowników śrubowych napędzanych przez dwa silniki PF Medium [2]. Ponieważ taka konstrukcja wymaga dyferencjałów w mostach (inaczej skręcać nie będzie) to każdy z tych dyferencjałów ma blokadę (dla lepszej sprawności w terenie) [3] i obie blokady są sterowane zdalnie za pomocą wału biegnącego przez całą długość pojazdu. Wał ten napędzany jest łańcuchem ze starego silnika 9V. Tyle o podwoziu.
Sterownikiem jest kostka NXT z jednym silnikiem NXT służącym jako przepustnica i dwoma czujnikami dotyku służącymi jako przełączniki do skręcania w prawo i w lewo. Oczywiście można to zbudować inaczej. Do kostki NXT podłączony jest też oczywiście czujnik IR Link.
W teorii za pomoca jednej kostki NXT i jednego czujnika IR Link można kontrolować prędkość 8 silników PF (używając wszystkich 4 kanałów obiorników IR PF, po 2 silniki na odbiornik). No i najważniejsze, że sterowanie prędkością tych silników nie stanowi problemu.
W praktyce da się to zrobić ale są oczywiście pewne wady tego rozwiązania:
- do każdego modelu potrzeba aż 12 baterii AA (6 do battery boxa i 6 do NXT)
- trzeba mieć zestaw NXT (choć nie wiem czy to akurat wada)
- nadajnik podczerwieni w czujniku IR Link nie jest tak dobry jak nadajnik w standardowym pilocie IR PF (łatwiej gubi sygnał)
Kiedyś będę musiał wypróbować odwrotne rozwiązanie - sterowanie samochodem zasilanym z kostki NXT przez standardowy pilot IR PF. Pozwoliłoby to na wyposażenie modelu w różnego rodzaju czujniki choć niestety model będzie musiał dźwigać na sobie cały komputer NXT a ten do małych nie należy.
Poniżej poglądowy filmik. Więcej fotek w galerii.
[youtube]http://www.youtube.com/watch?v=wXAI3GlorAw[/youtube]
Zamieściłem też przykładowy program.