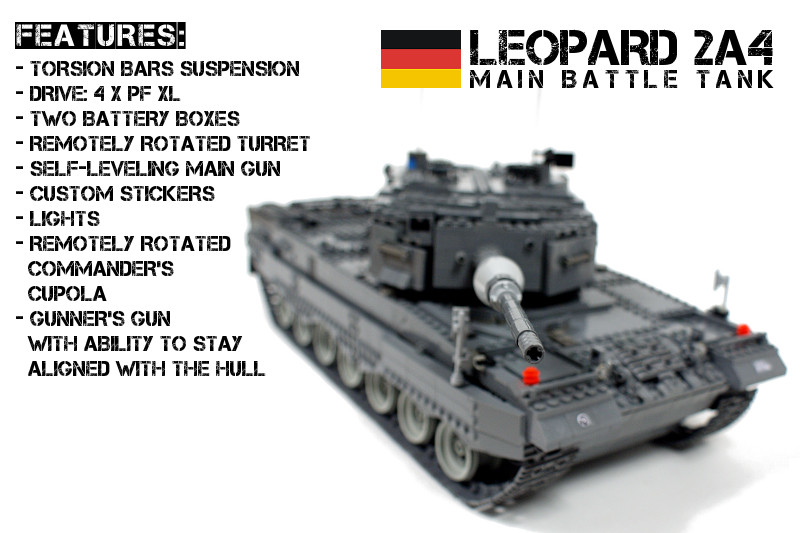
[MOC] Leopard 2A4
: 2010-10-31, 08:43

Dane techniczne:
Wymiary: dł. 70s (z lufą) / szer. 26s / wys. 23s (bez anten)
Waga: 3.42 kg
Zawieszenie: wałki skrętne
Napęd: 4 x PF XL z przełożeniem 1:1
Inne: obracanie wieży PF Mediumem, obracanie karabinu działonowego PF Mediumem, obracanie kopułki dowódcy micromotorem
Kiedyś się zarzekałem że nie zbuduję niemieckiego czołgu, no ale w końcu jest. O oryginalnym Leopardzie 2 nie ma się specjalnie co rozpisywać, bo jest to konstrukcja stara i znana. Wprowadzony jeszcze pod koniec lat 70-tych, jest pierwszym czołgiem trzeciej generacji, obecnie bardzo rozpowszechnionym w UE i poza. Pod wieloma względami jest zbliżony do Abramsa (m.in. to samo działo główne), ale zbudowano go ze znacznie większym naciskiem na mobilność, stąd m.in. mniejsza waga. Obecnie wprowadzana jest wersja 2A7+, ja wybrałem wersję 2A4 z dwóch powodów: po pierwsze to ostatnia wersja z pierwotnym, charakterystycznym kształtem wieży który troszeczkę przypomina mi Tygrysa (a który został wymuszony raczkującą wtedy technologią tworzenia pancerzy kompozytowych), a po drugie wersji A4 używa nasze własne wojsko.
Budowę zacząłem od upolowania modelu Leopcia w skali 1:35, co samo w sobie trwało kilka miesięcy bo ta wersja w tej skali jest rzadkością. Zakupiony i złożony model posłużył mi, razem z blueprintem, jako punkt odniesienia do własnego modelu, i muszę powiedzieć że było to rozwiązanie o niebo lepsze niż oparcie się na samym blueprincie. Nie tylko mogłem zobaczyć np. detale pancerza pod wieżyczką, ale również miałem możliwość wzorować swoje nalepki na kalkomanii z modelu. Z wyglądu jestem raczej zadowolony, pomijając bardzo grille na tyle kadłuba które powinny być okrągłe, a nie są z racji znajdowania się pod nimi odbiorników IR. Znacznie lepiej rozwiązał to ktoś inny tutaj: http://www.brickshelf.com/cgi-bin/gallery.cgi?i=3457020
Jeśli chodzi o technikalia, model jest przede wszystkim testem zawieszenia na drążkach skrętnych. Wstyd przyznać, ale takie rozwiązanie sugerował mi już lata temu Duke i wtedy jakoś nie byłem przekonany. Zawieszenie jest w zasadzie banalnie proste: każde koło jezdne siedzi na zgiętym liftarmie 2 x 4. Drugi koniec liftarma nałożony jest na ośmiostudową oś wchodzącą w kadłub, która to oś od strony koła może się swobodnie obracać, ale jej koniec wpuszczony w kadłub jest zablokowany w podwoziu i obracać się nie może. Kiedy więc koło jest obciążone, oś się skręca, a jej elastyczność pozwala jej potem odkręcić się z powrotem. Jest to rozwiązanie nieco może ekstremalne, ponieważ jak by nie patrzeć skręcamy axle, ale na tych kilku które wyciągnąłem z modelu do obejrzenia nie widać żadnych znaków uszkodzeń. Warto zaznaczyć że mimo słusznej wagi modelu obciążenie jednego koła to mniej niż ćwierć kilograma - co nie zmienia faktu że do budowania czołg stawiałem na stojaczku, bojąc się dociskać zawieszenie do ziemi.
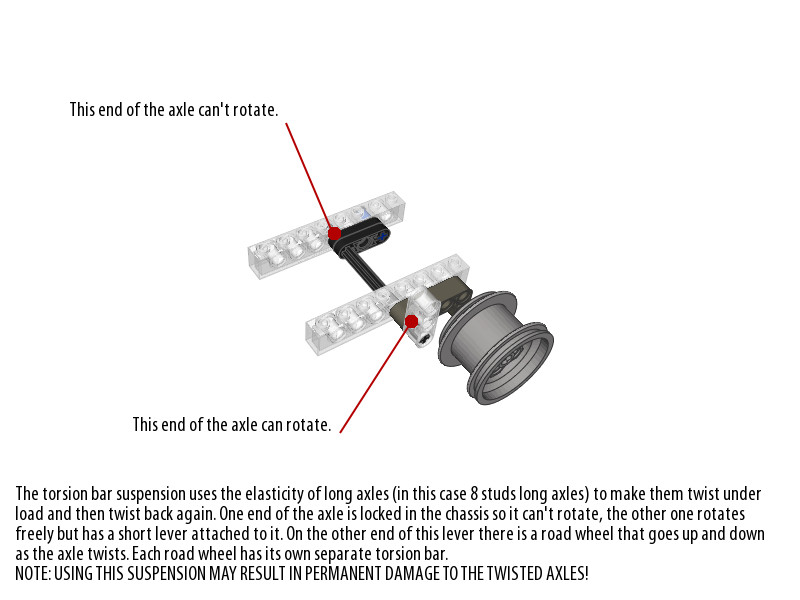
W praktyce zawieszenie sprawdza się rewelacyjnie. Na filmie widać jak dokładnie reaguje na nierówności, i to wszystko bez użycia ani jednego amortyzatora. Co więcej, taka konstrukcja zawieszenia pozwala łatwo regulować sobie jego twardość np. długością użytych axli, choć obawiam się że w bardzo lekkich konstrukcjach i tak niezbyt się sprawdzi. W następnym czołgu będę chciał poeksperymentować dalej i spróbować kręcić wałkami zdalnie, żeby regulować prześwit. Prześwit uzyskany w Leopciu to ok. 3 study, co przy uwzględnieniu skali jest wynikiem ok. 20% gorszym od rzeczywistego.
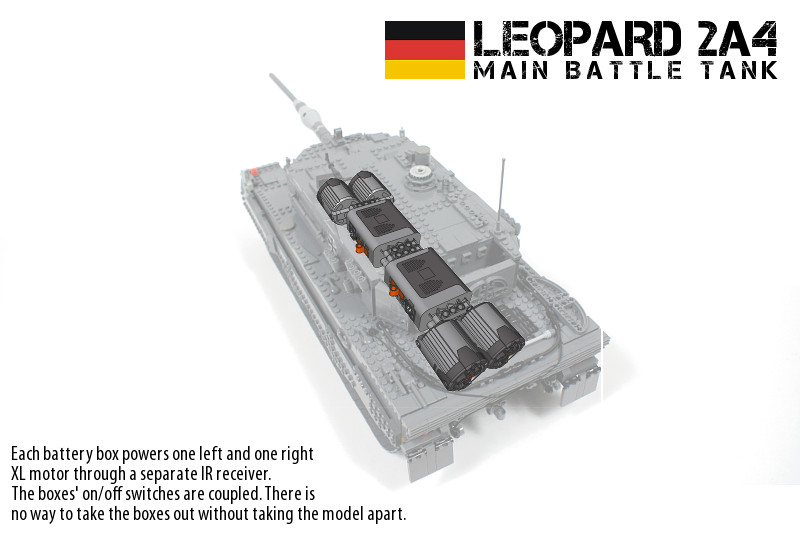
Drugie niecodzienne rozwiązanie w modelu to użycie czterech XLi do napędu - po jednym na każde koło napinające. Model zasilają dwa battery boxy, z czego na jeden przypada jeden prawy i jeden lewy XL. Miałem nadzieję, że taką ilość momentu obrotowego da się wykorzystać do rozwinięcia dużych prędkości, i podwozie testowałem z przełożeniem nieco poniżej 3:1. Niestety w miarę wzrostu masy zaczął się dramat i przy 3 kg model nawet nie ruszał z takim przełożeniem. Po zmianie na 1:1 model porusza się całkiem żwawo, ale jak na taką moc jest to i tak wynik raczej żenujący. Wygląda na to, że XLe drastycznie tracą na efektywności jeśli się je przyspiesza, co innego przy 1:1 albo przy redukcji.
W kadłubie, oprócz czterech XLi, dwóch batboxów i trzech wieżyczek IR, zmieścił się jeszcze jeden Medium z mechanizmem obrotu wieży. Dzięki obracaniu wieży 'od spodu' i wpuszczeniu obrotnicy dość nisko w kadłub, konstrukcja podstawy wieży została znacznie uproszczona i zajęła o wiele mniej miejsca wewnątrz wieży. Przez obrotnicę przechodzą dwa kable, stąd też jej obrót jest w jakimś tam stopniu ograniczony. Sama wieża siedzi na liftarmowym szkielecie w który wbudowana jest jedna rolka na tyle wieży. Rolka ta opiera się na kadłubie i zachowuje odstęp między nim a wieżą, co jest może rozwiązaniem topornym ale działającym.
W wieży miałem ambicję zamontować działo główne które będzie jednocześnie utrzymywać poziom i mieć zdalnie regulowany kąt podniesienia. Zrobiłem prototyp takiego rozwiązania montując lufę do modułu zawieszonego na pojedyńczym axlu, z przeciwwagą w postaci klocka z balastem i z micromotorem regulującym kąt pomiędzy lufą a przeciwwagą. Takie rozwiązanie rzeczywiście pozwala w ograniczonym zakresie zmieniać kąt podniesienia lufy, jednocześnie cały czas utrzymując jej poziom - tzn. jeśli podniesiemy lufę, będzie się ona tak utrzymywać mimo przechylania czołgu. Niestety, rozwiązanie to w końcu upadło z dwóch powodów: razem z lufą analogicznie opuszczała się i podnosiła przeciwwaga, a to wymagało wyższej wieży, a do tego kabel od micromotoru, nieważne jak ułożony i którędy poprowadzony, wpływał na pozycję całego modułu. Ostatecznie więc micromotor wywaliłem, rezygnując z jakiejkolwiek kontroli kąta lufy. Jest to słabe rozwiązanie, ale z drugiej strony zrobiłem tyle czołgów z podnoszoną lufą że mogę raz zrobić coś innego. Końcowe rozwiązanie używa dwóch klocków z balastem: jeden z tyłu modułu do przeciwważenia lufy, a drugi zamontowany pod osią na której wisi cały moduł dla obniżenia środka ciężkości, ponieważ jak pokazały testy im większa odległość między tą osią a środkiem ciężkości całego modułu, tym dokładniej lufa reaguje na zmiany położenia.
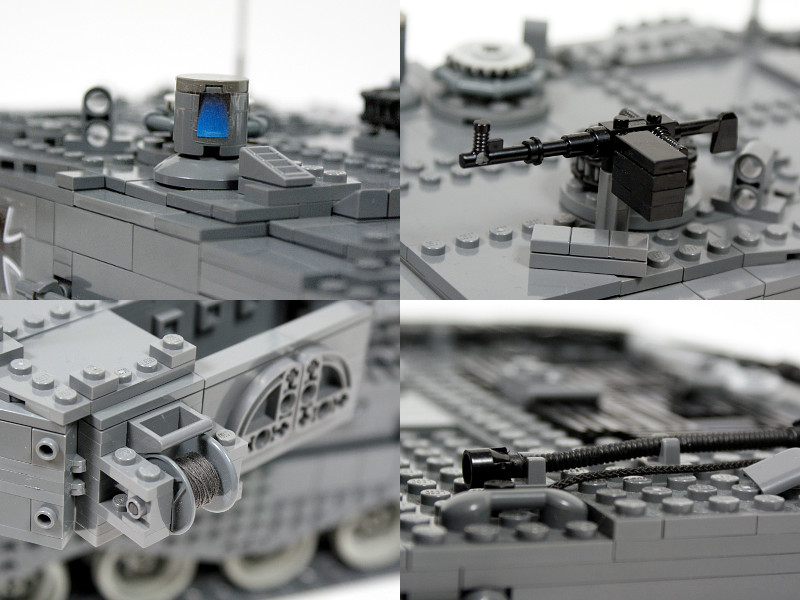
Wyrzucony z modułu lufy micromotor posłużył w znacznie prostszym celu, tzn. do obracania kopułki dowódcy. Nadaje się do tego idealnie ponieważ nie była potrzebna żadna redukcja i kopułka siedzi bezpośrednio na silniku.
Z tyłu wieży znajduje się jeszcze jeden PF Medium. Miałem wewnątrz wieży trochę miejsca do wykorzystania, a z kolei wszystkie kanały IR były już zajęte, dlatego pomyślałem że jeśli zrobię w wieży kopię mechanizmu jej obracania, ale działającą w drugą stronę, to będę mógł obracać np. karabinem działonowego tak, żeby był równo z kadłubem kiedy wieża się obraca. Tak też zrobiłem, podłączając Mediuma przez przełącznik w kadłubie, który można włączyć lub wyłączyć wkładając axla w otwór nad kurtyną boczną. Karabin może więc albo obracać się razem z wieżą, albo obracać się przeciwko wieży. W praktyce takie rozwiązanie niestety nie do końca się sprawdza, bo mimo upchnięcia wewnątrz wieży dokładnej kopii mechanizmu który ją obraca (co znaczy, że wieża ma dwie obrotnice: jedną pod spodem, drugą w środku), istnieje znaczna różnica oporów między obracaniem całej wieży a samego karabiny. Z racji braku mechanicznego połączenia między jednym a drugim mechanizmem, skutkiem jest to, że karabin obraca się szybciej niż wieża i nie zachowuje dokładnego wyrównania z kadłubem.

To w sumie tyle. Model nie jest idealny, brak kontroli podniesienia działa jest na pewno dużym minusem, za to z zawieszenia jestem bardzo zadowolony. Pozwoliłem sobie wrzucić go do działu MT, jako że jest chyba wystarczająco dopracowany, ma nawet nalepki oddające rzeczywiste oznakowania niemieckiego Leoparda (gdybym zachował instrukcję z modelu do sklejania, wiedziałbym nawet jakiej konkretnej jednostki). Uprzedzam że niestety, ale zbuduję następny czołg, i nawet będzie on dość podobny choć może bardziej wypasiony :)
Galeria
Galeria WIP
Zdjęcia na zachętę:






I film:
[youtube]http://www.youtube.com/watch?v=XvekGcmerGc[/youtube]
