[MOC] Terminator
: 2012-05-25, 10:12
Witam wszystkich. Od dawna chodziło za mną zbudowanie robota podobnego do człowieka sterowanego pilotem z wieloma funkcjami. Tego projektu szczerze się bałem ale w końcu postanowiłem podjąć wyzwanie i przynajmniej spróbować.
Zaplanowałem sobie następujące funkcje:
Ręka- zginanie palców, obrót nadgarstka, zginanie w łokciu, podnoszenie ręki, obrót ręki.
Głowa- obrót głowy, wychylanie we wszystkich kierunkach.
Wiedziałem że najgorzej będzie z ramieniem a konkretnie z obrotnicą która wiele będzie musiała wytrzymać ale o tym później.
Dane techniczne:
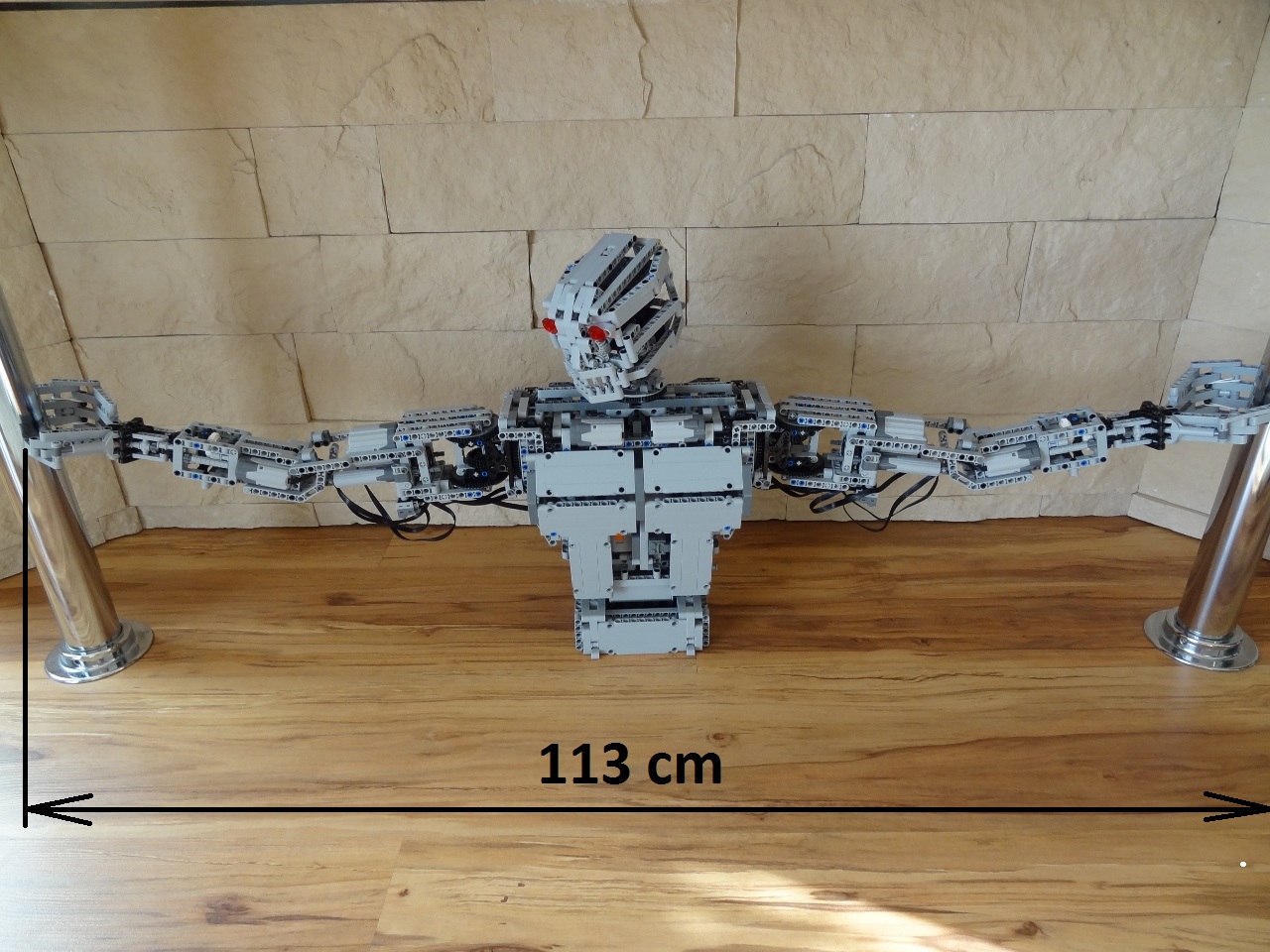
Długość ramion – ok. 113 cm
Obwód klatki piersiowej – ok. 68 cm
Wysokość – 41 cm
Waga – 3 kg
12 silników PF medium
2 silniki PF XL
7 odbiorników IR
3 battery box
1 światła
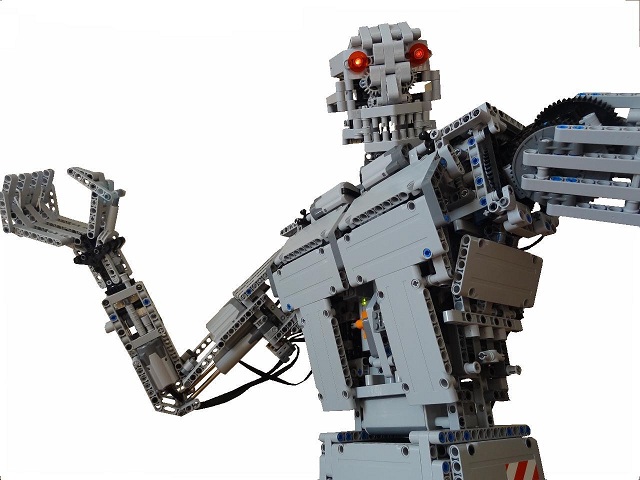
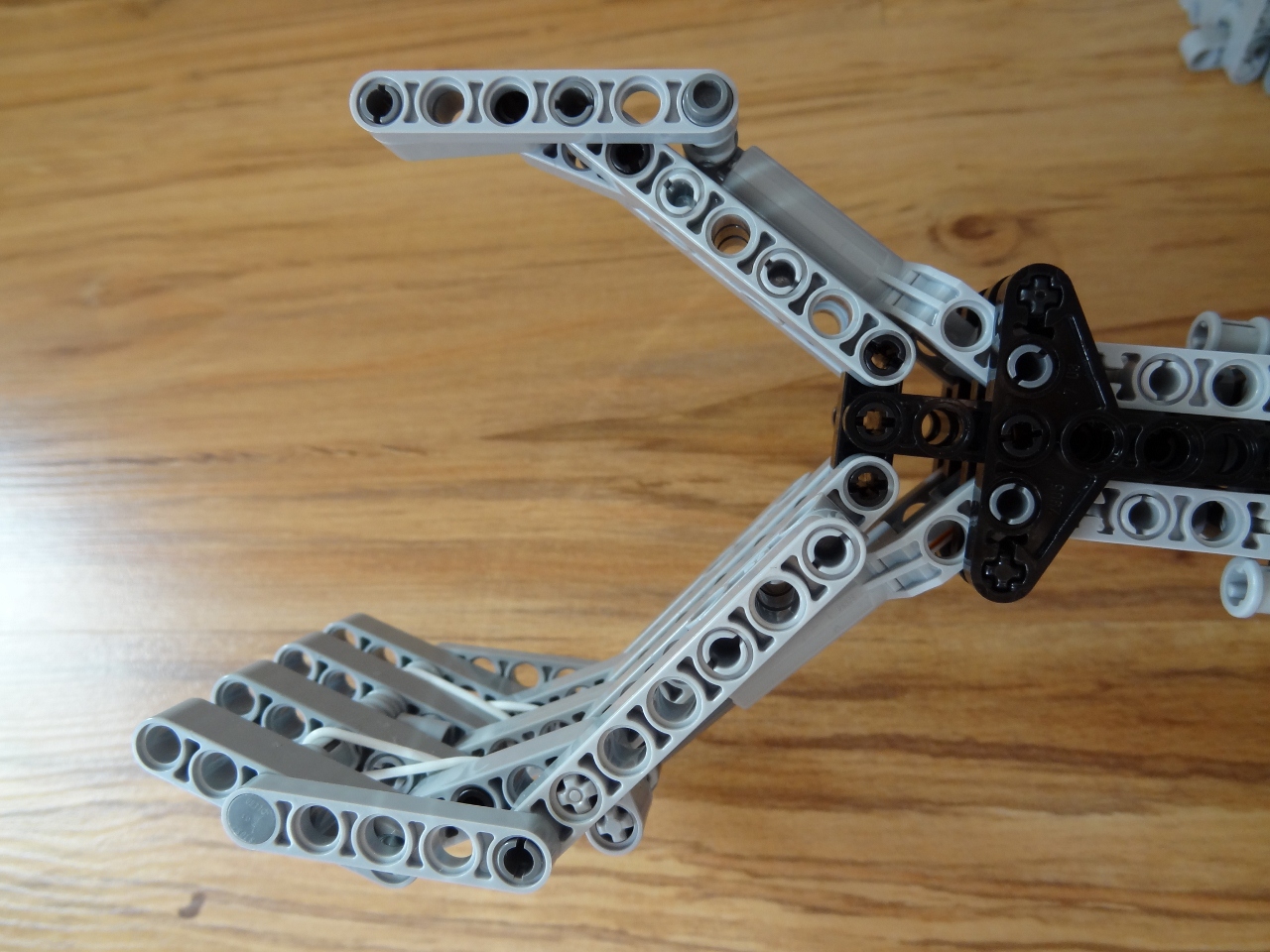
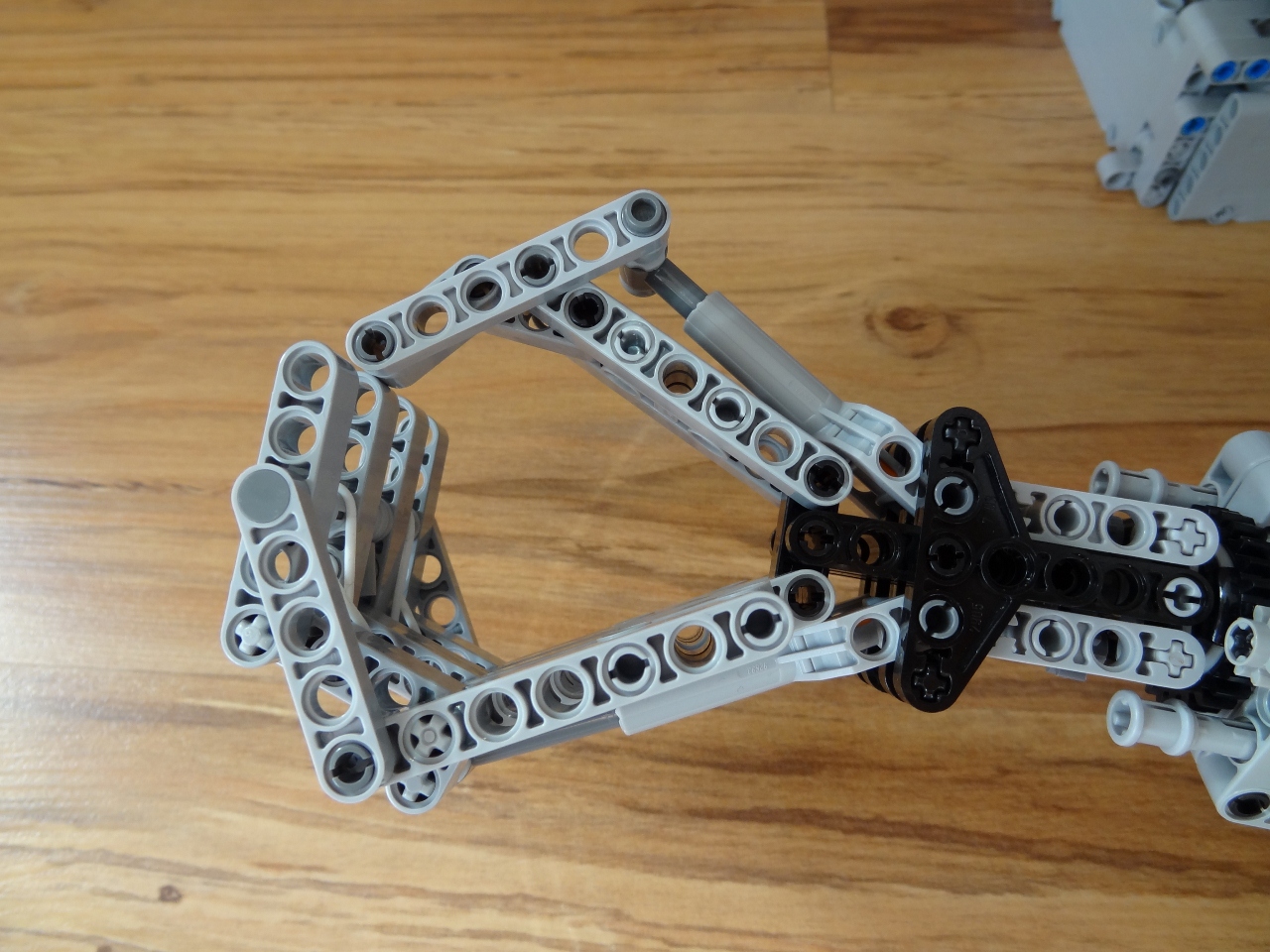
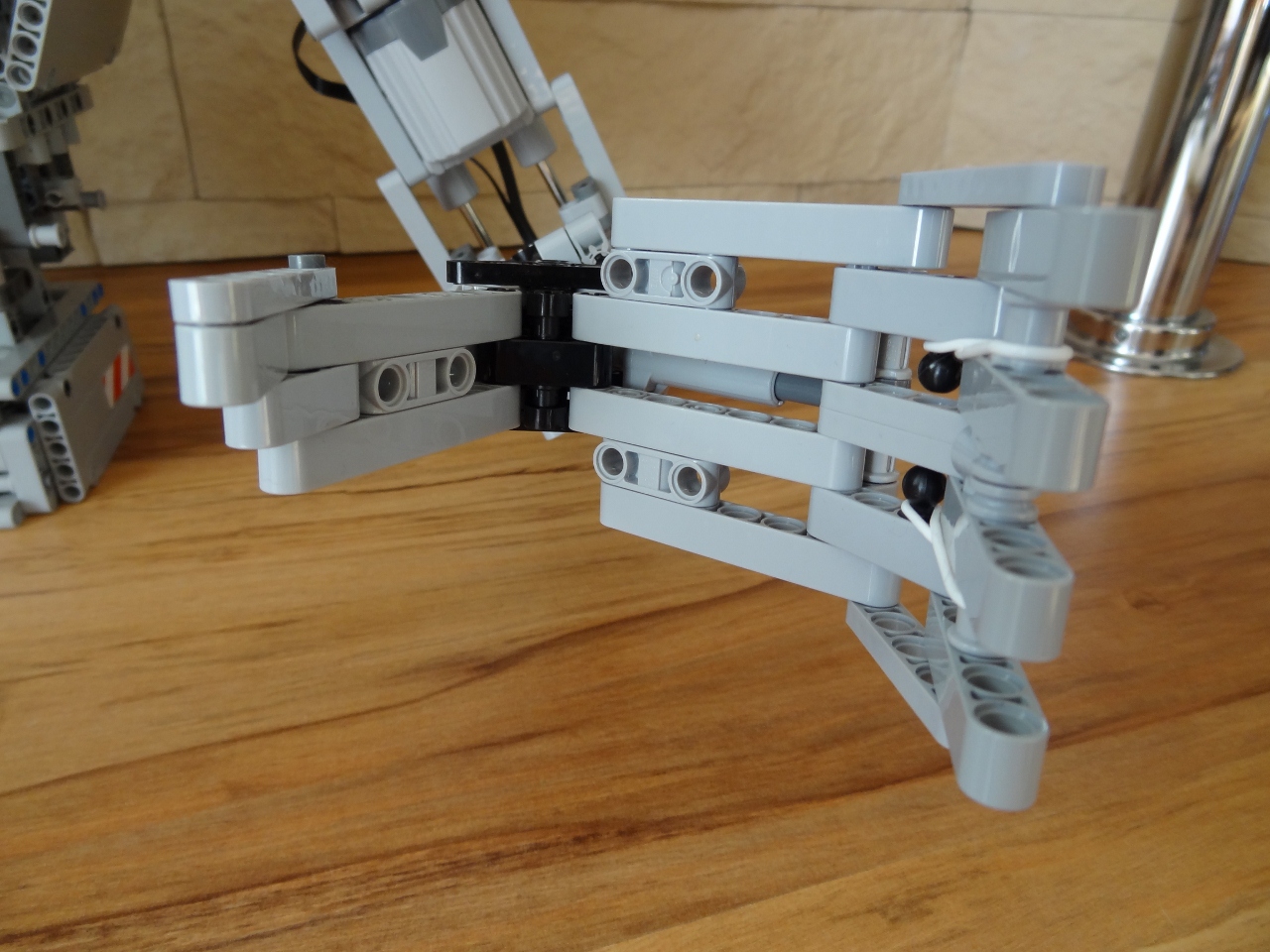
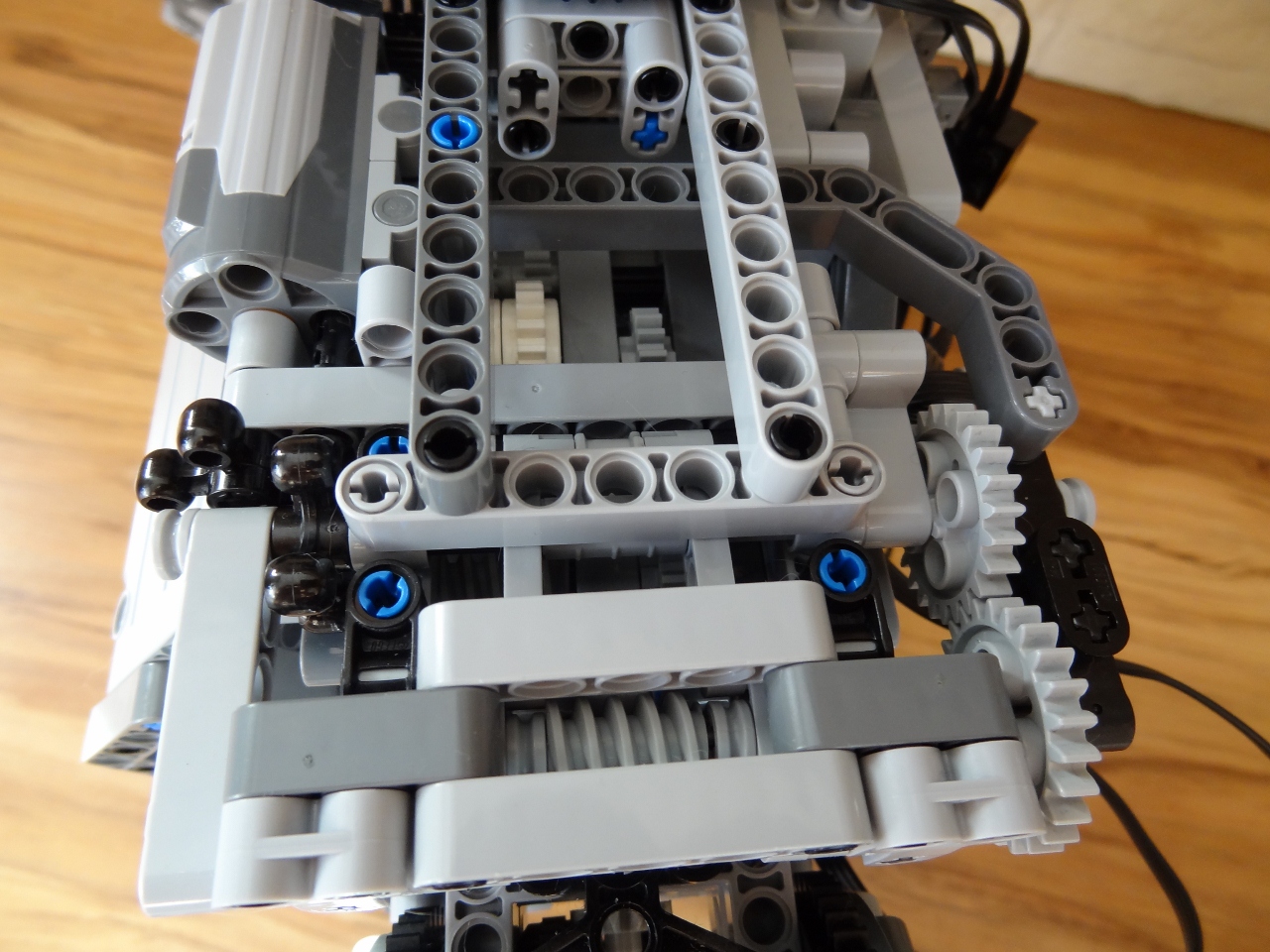
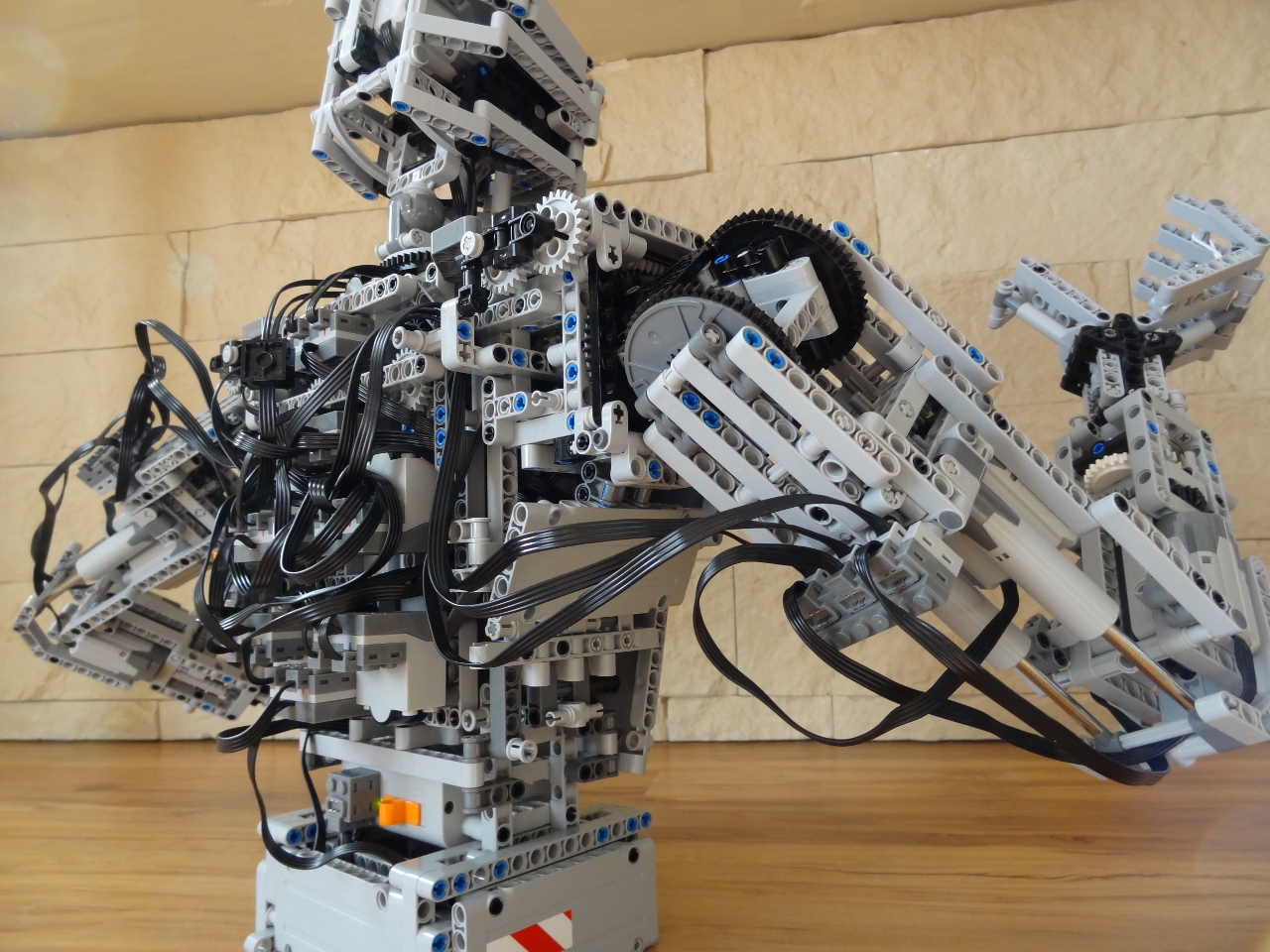
Budowę robota rozpoczołem od dłoni zaciskanej dwoma małymi siłownikami śrubowymi. Palce w dłoni zginają się w sposób przypominający zaciskanie ludzkiej dłoni tworząc moim zdaniem zgrabną pięść. Siłowniki te są bardzo słabe więc usprzęgliłem je sprzęgłem 2,5 Nm czyli tym najsłabszym a i tak (czasami) jeden z nich lubił przepuszczać tracąc synchronizację z drugim. Obrót nadgarstka również jest usprzęglony i ograniczony w ruchu tak jak to się ma w ludzkim.





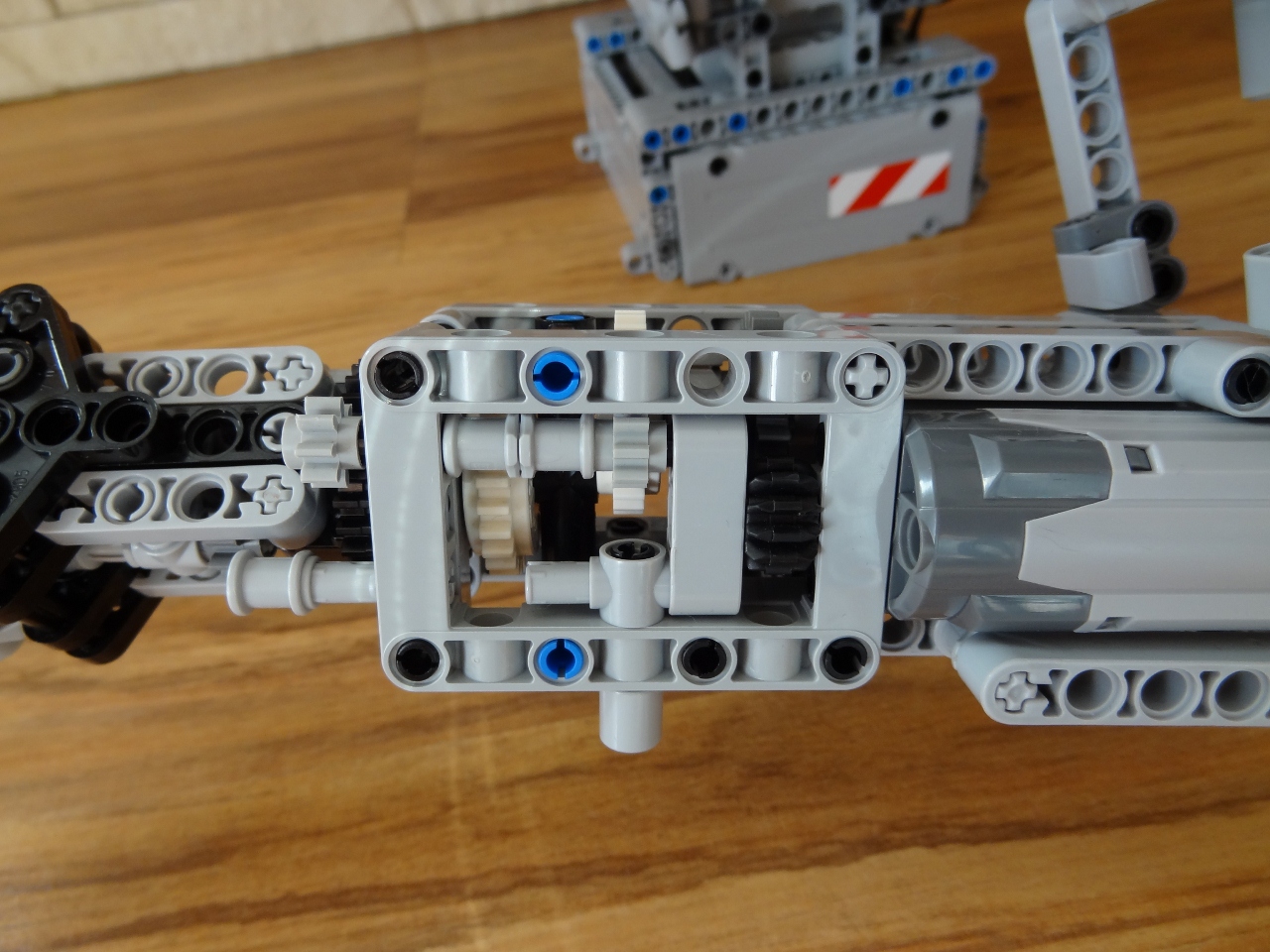
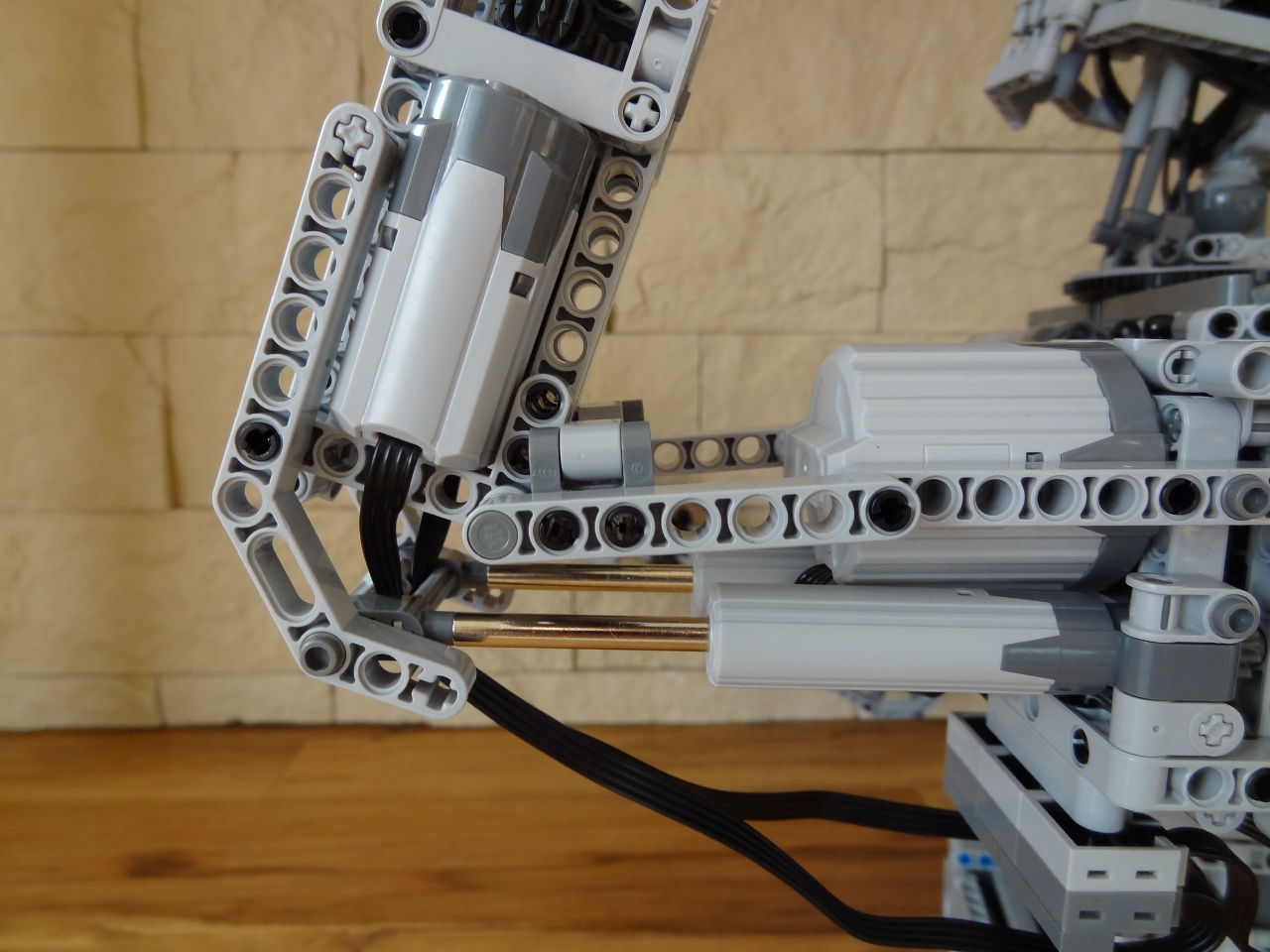
Staw łokciowy pracuje w zakresie ok. 90 stopni. Wychylają go dwa duże siłowniki śrubowe napędzane XL'em. Postawiłem na taką konfigurację aby uzyskać maksymalną prędkość wychylania
(przekładnia: z24-z8).


Pierwotnie ta część ręki była zupełnie inna. Dwa małe silniki były na przedramieniu aby ich ciężar maksymalnie przenieść bliżej ramienia. Dwa napędy przechodziły wówczas przez oś zginania łokcia. Chociaż wszystko było usprzęglone to jednak podczas zginania łokcia mechanizmy palców i nadgarstka przeszkadzały sobie w sposób dla mnie niedopuszczalny.
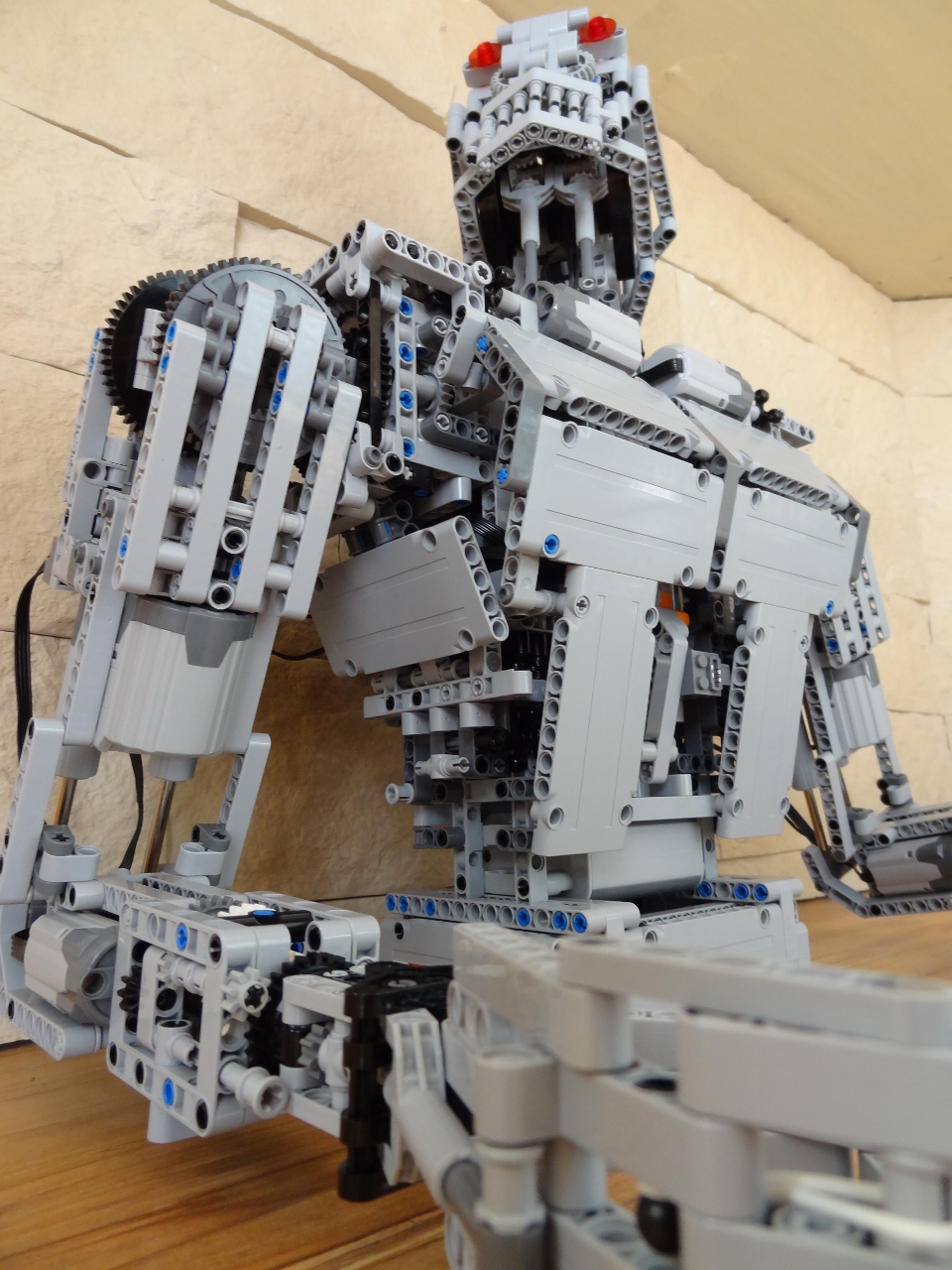
Ramię składa się z trzech dużych obrotnic, dwóch na stałe ze sobą połączonych i jednej która łączy rękę z korpusem. Obrotnica łącząca z uwagi na duże obciążenia rozrywające została dodatkowo wzmocniona po obu stronach cienkim liftarmem. Napędza ją mały silnik z wykorzystaniem ślimaka (przekładnia: knob-z24-ślimak).
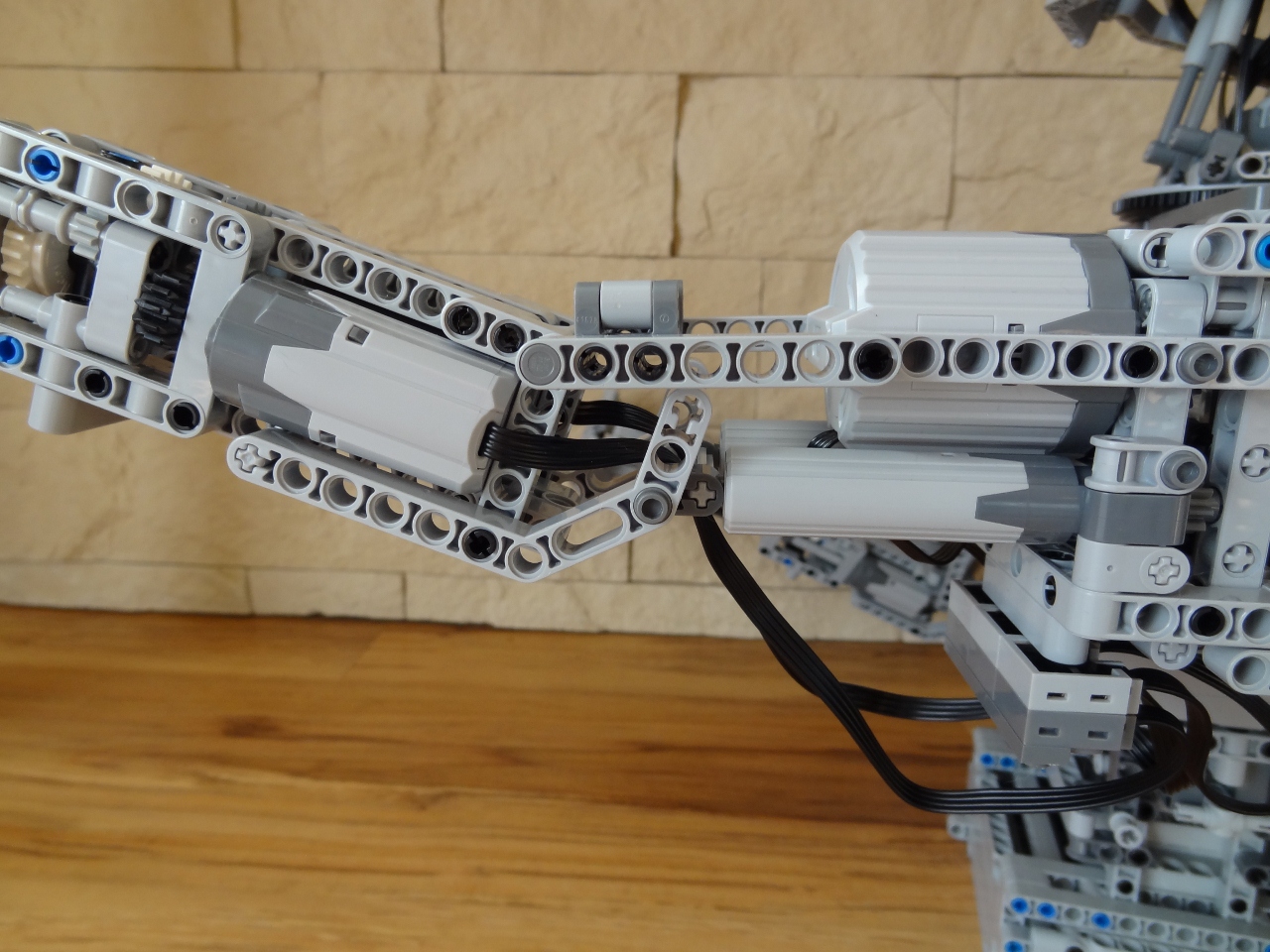
Obrót ręki napędzany jest również małym silnikiem z podwójnym usprzęgleniem (przekładnia: z24-z12, podwójne z8 na podwójne sprzęgło z24, z16-ślimak, z24-z8, płaska z12-z36, podwójna z8 na podwójną obrotnicę). Druga ręka jest lustrzanym odbiciem pierwszej.



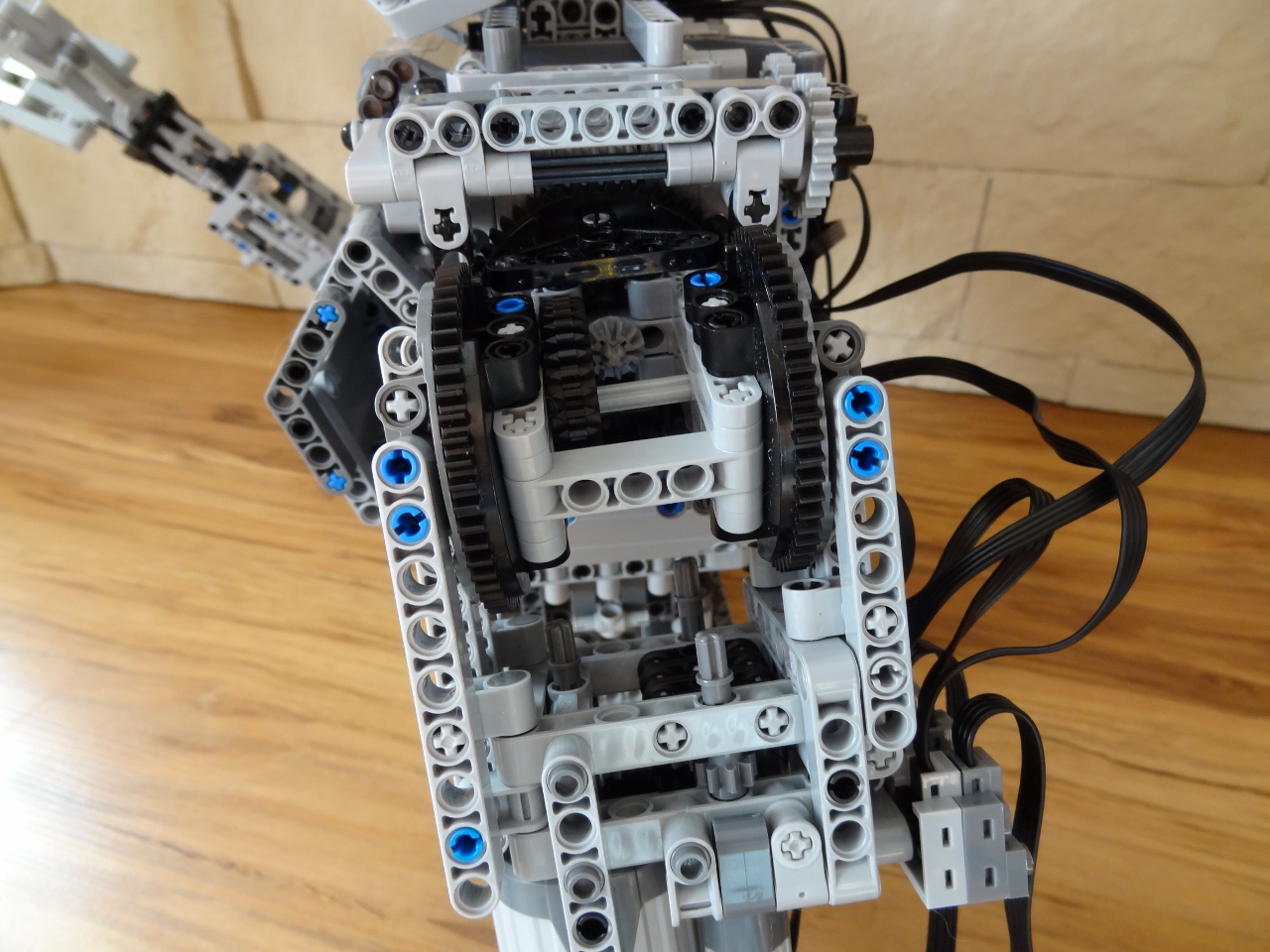
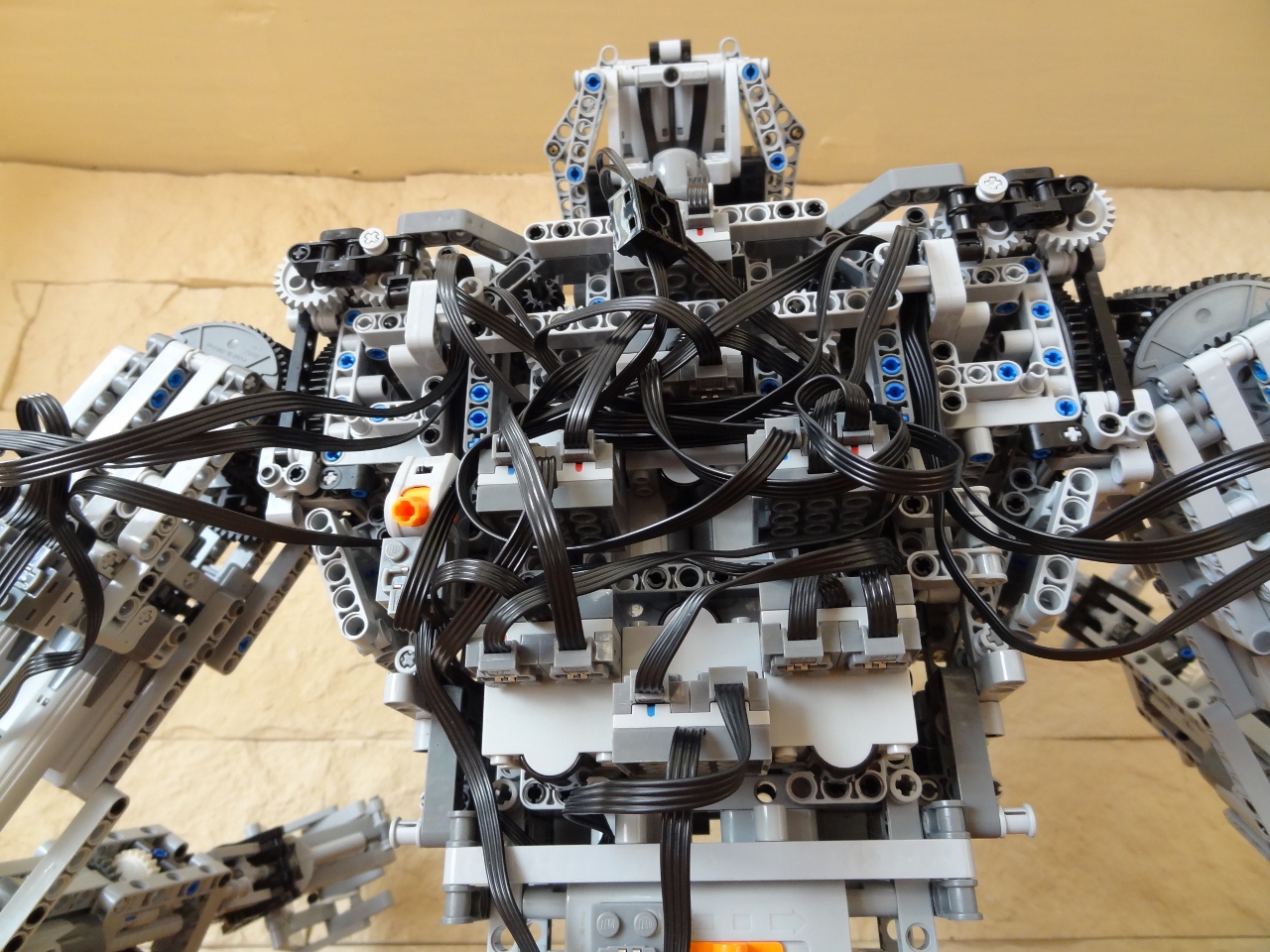
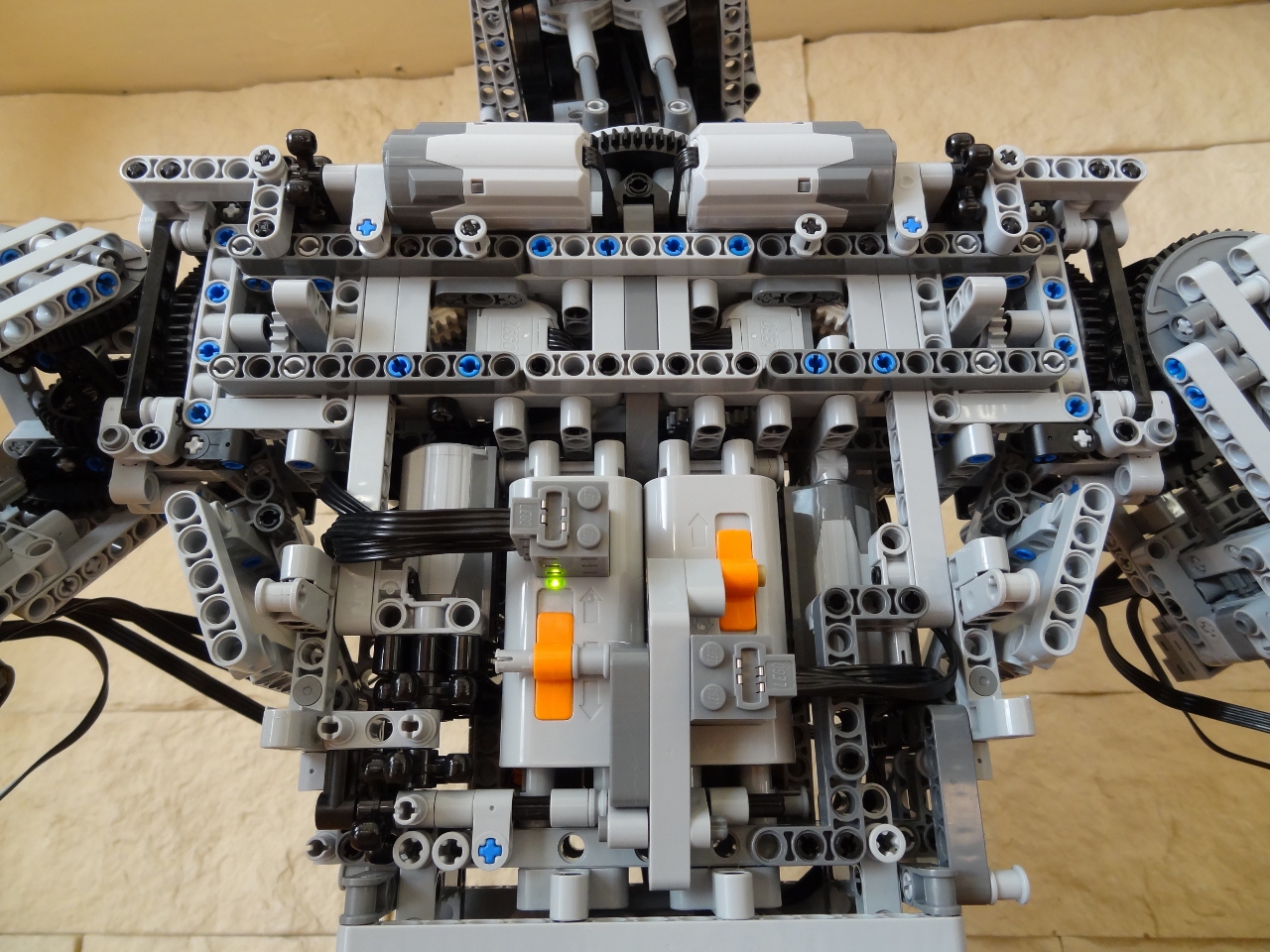
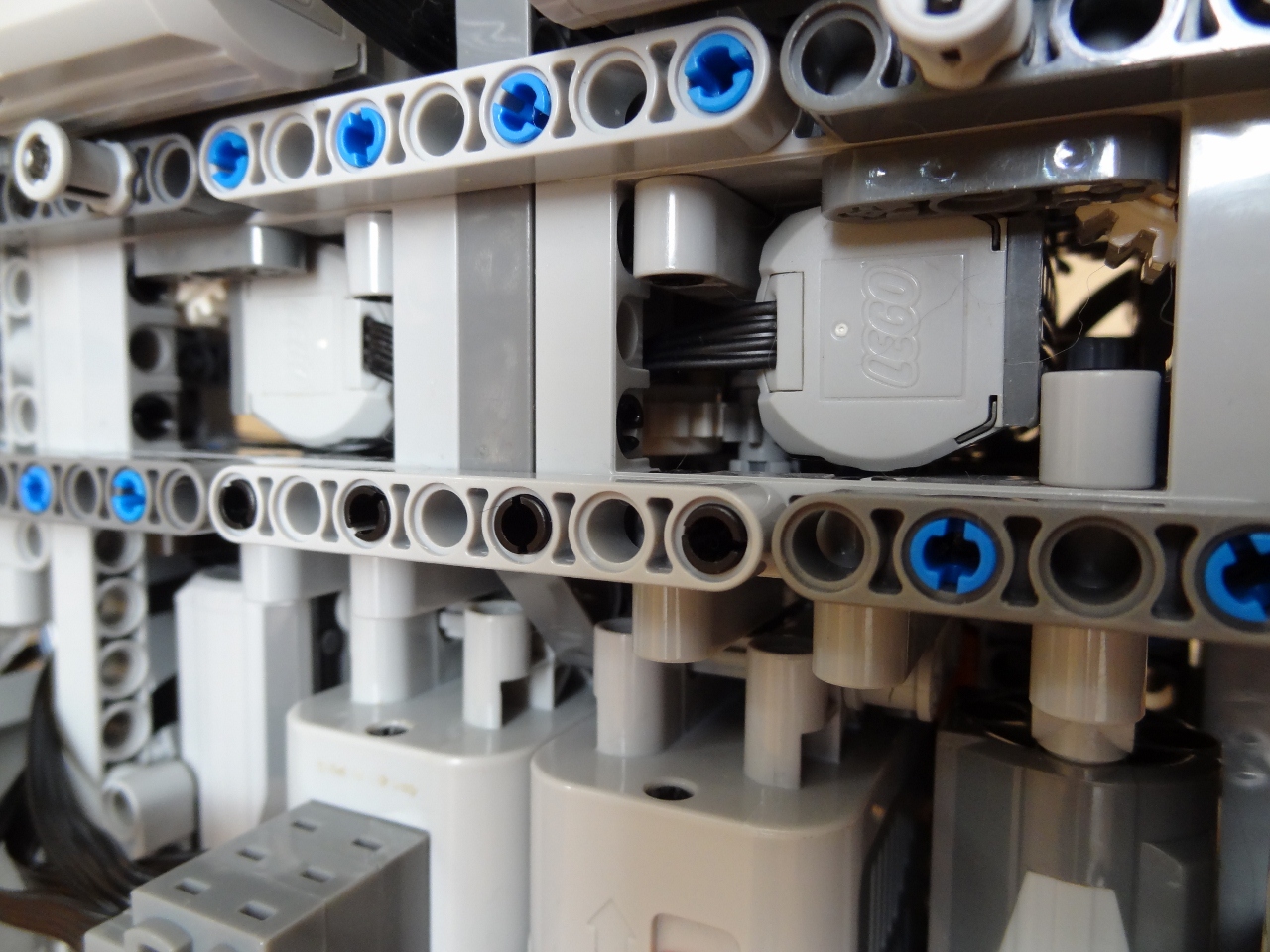
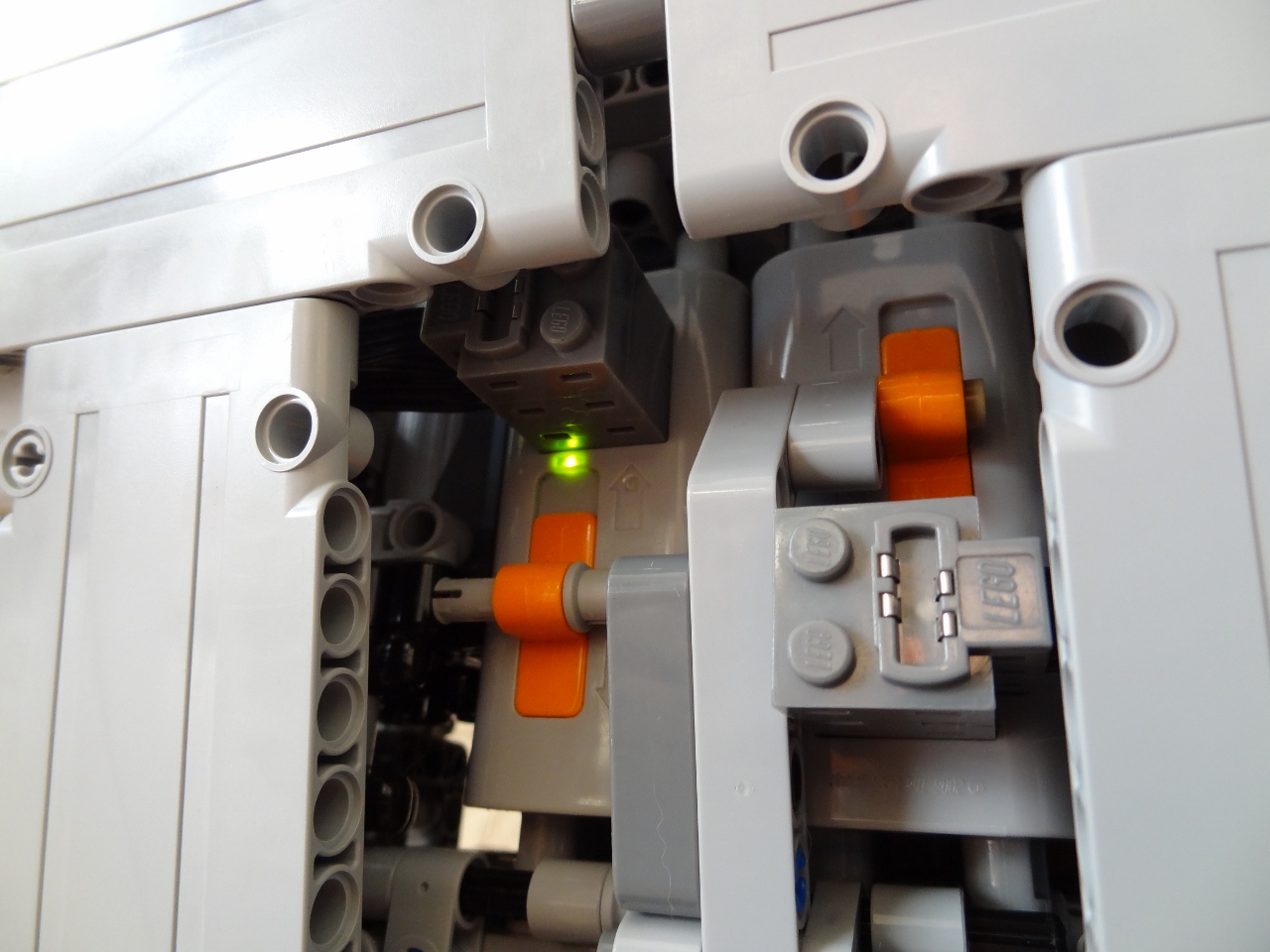
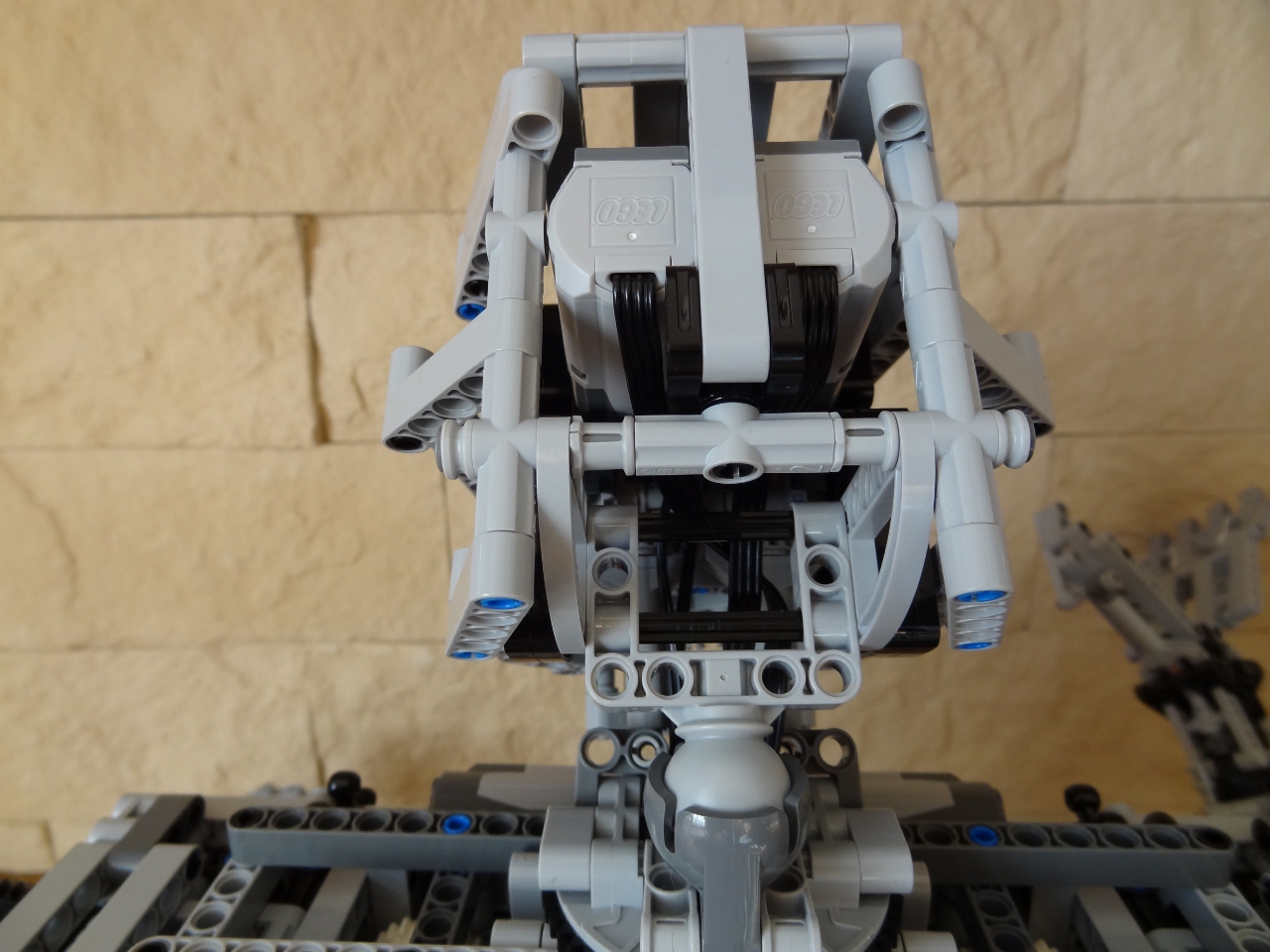
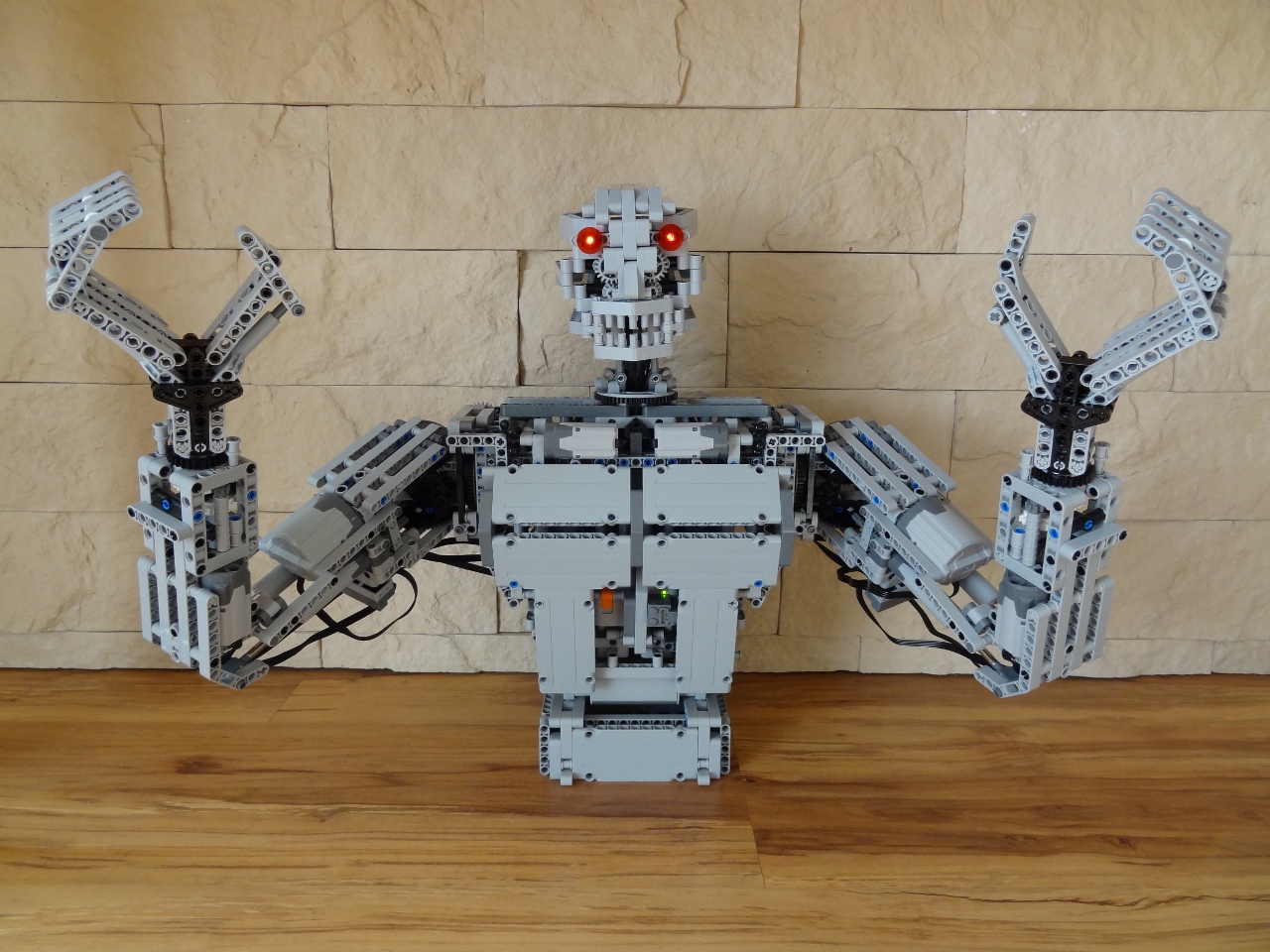
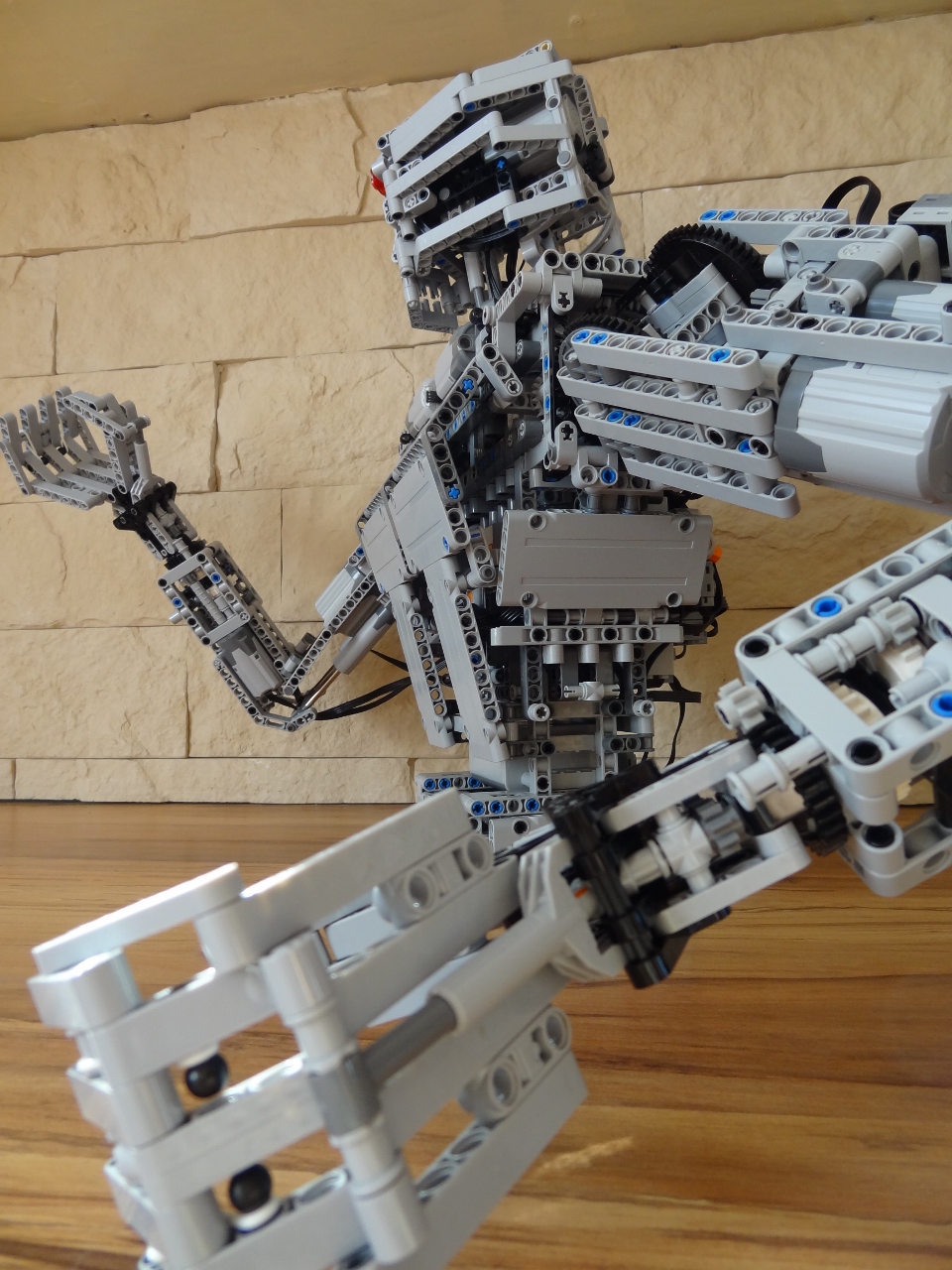
Korpus zachowuje według mnie zbliżone proporcje do rąk. Starałem się go maksymalnie wzmocnić i usztywnić oczywiście zachowując pełną funkcjonalność i kształt klatki piersiowej. Sercem korpusu są oczywiście trzy pakiety bateri, siedem wież IR oraz silniki. Cztery do ramion, piąty do obrotu głowy i szósty do przełączania pomiędzy pakietami. Wszystkie wieże z kablami umieściłem z tyłu dzięki czemu udało sią dość estetycznie moim zdaniem ukształtować klatkę piersiową.




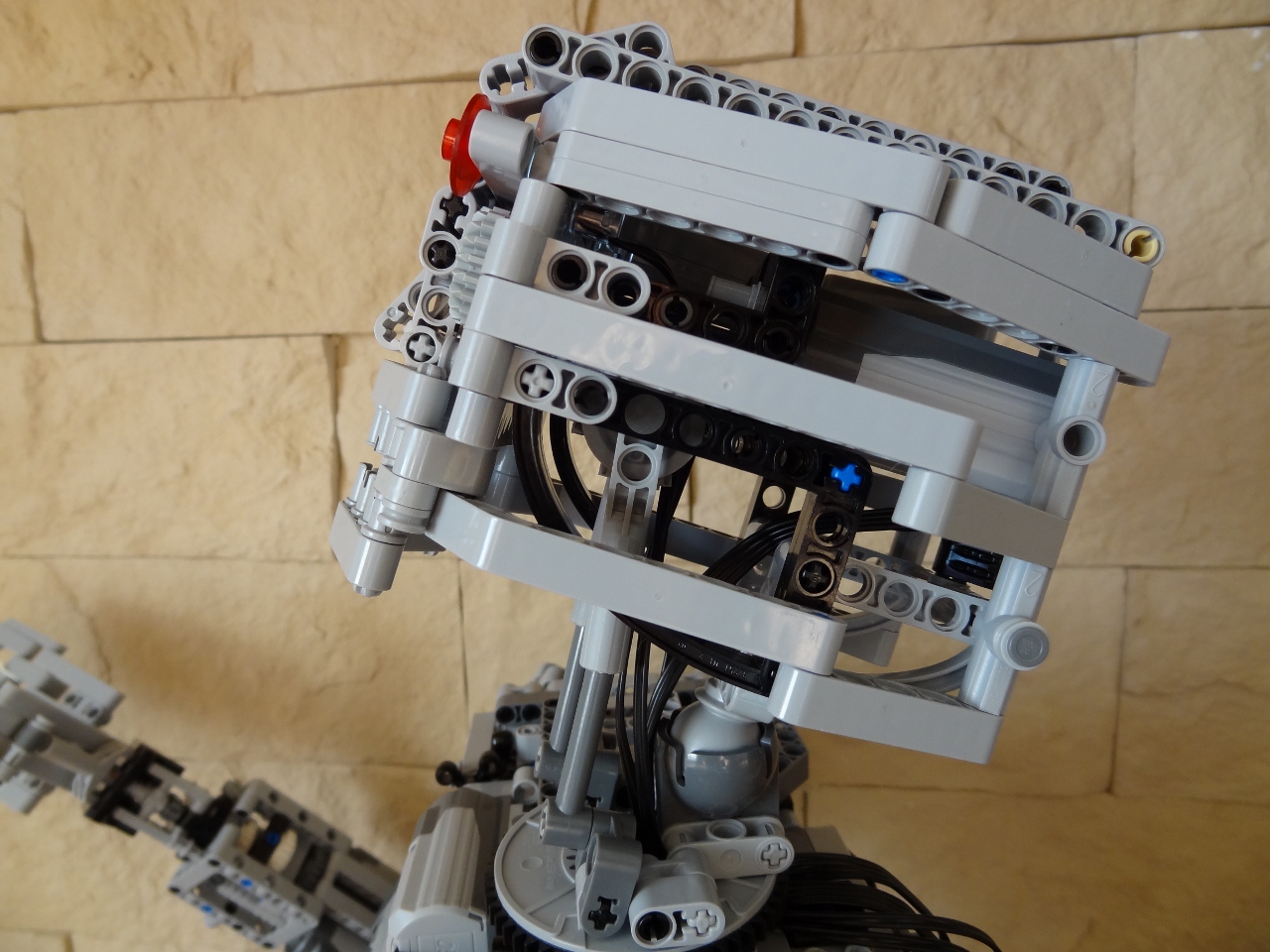
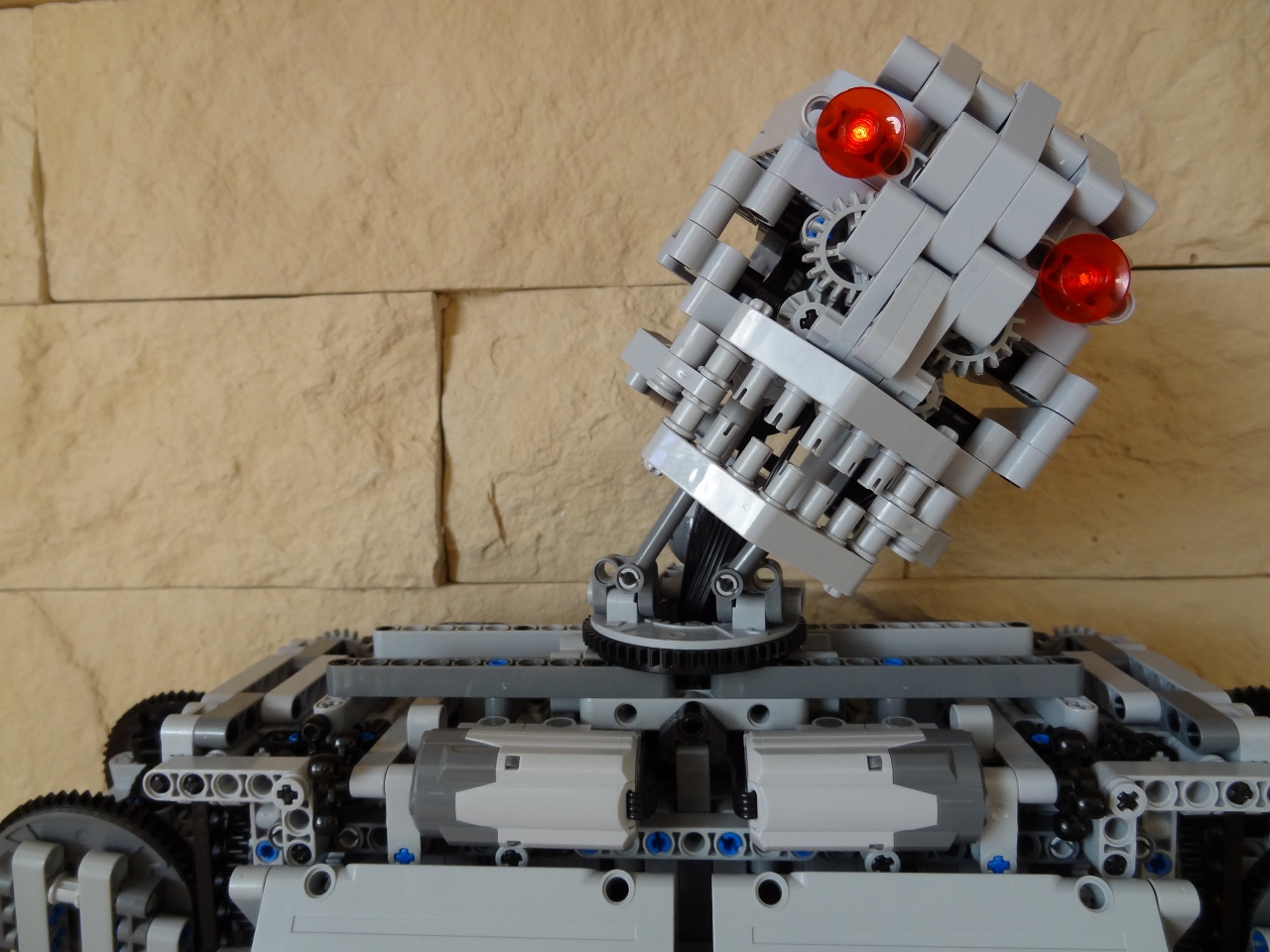
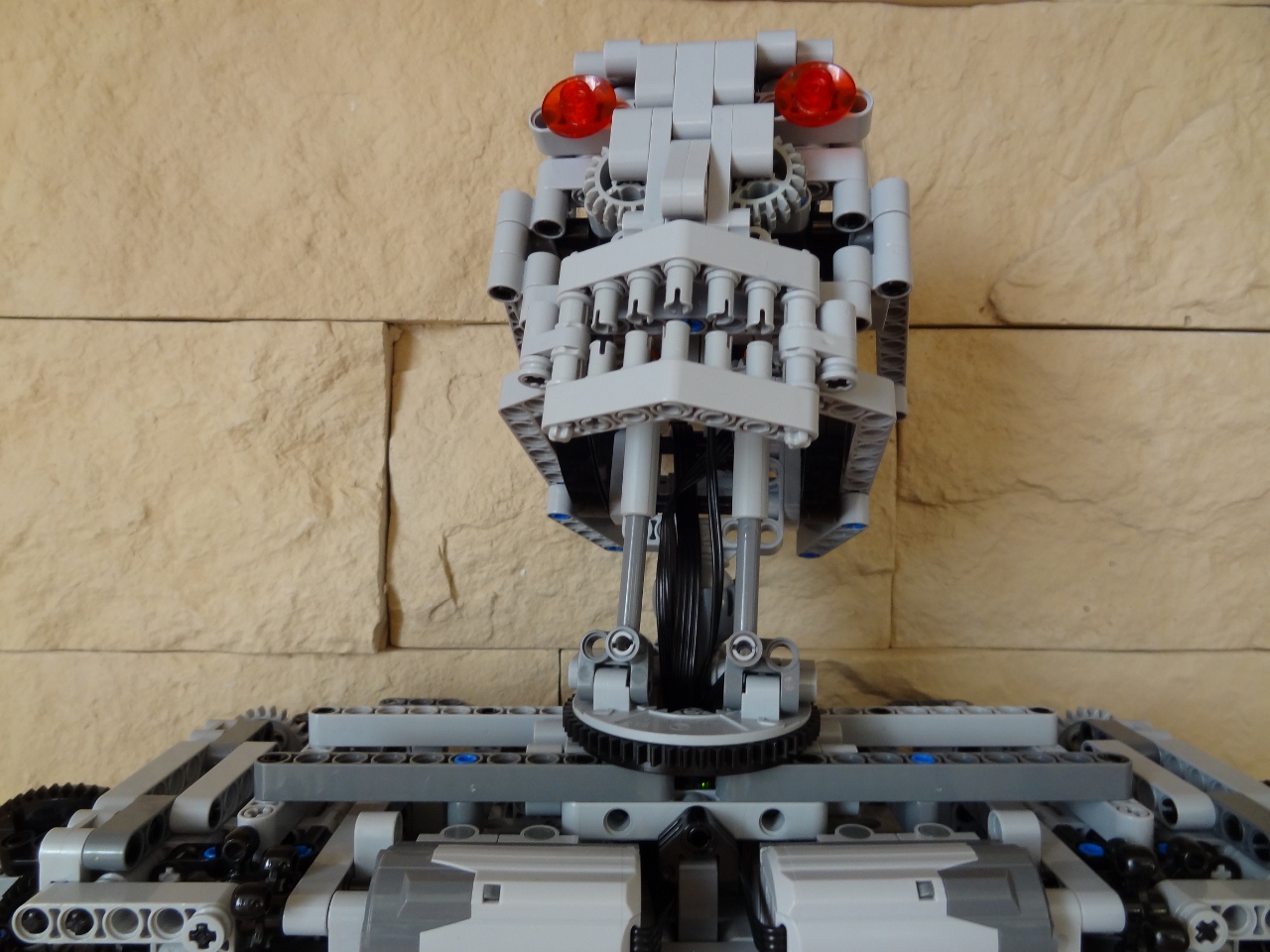
Głowę budowałem na końcu dosłownie z resztek szarych części. Sam mechanizm poszedł dość łatwo choć na początku małe siłowniki były usprzęglone gumkami lego (odległość między silnikami umieszczonymi w głowie nie pozwalała na użycie sprzęgła z24). Sam mechanizm z gumkami działał bardzo dobrze ale po zbudowaniu reszty głowy nie dawał rady. W to miejsce zastosowałem zębatki z20 na płaską z12. Na filmie pewnie będzie słychać jak zgrzytają ale to raczej nie groźny kompromis dla słabiutkich siłowniczków. Głowa porusza się we wszystkich kierunkach dzięki trzem silnikom dając trochę efekt 3D. Dopuściłem się też małej ekstrawagancji jak na mnie i zabudowałem światła jako oczy.






MOC oceniam jako udany. Oczywiście nie jest to model filmowego terminatora a jedynie nazwa człekokształtnego robota. Udało mi się zbudować wszystko tak jak zaplanowałem choć chciałem żeby potrafił się czołgać by odegrać scenę z filmu gdy ginie pod prasą. Niestety ręce nie zginają się w trzeciej kluczowej płaszczyźnie. Wykonanie jej osobiście uważam za bardzo trudne i prawie niemożliwe ale kto wie.
Troche się napisałem i pewnie popełniłem mnóstwo błędów za które z góry przepraszam.
Dodaje dwa filmiki. Pierwszy krótki zrobiony specjalnie dla forumowiczów z małą scenką na końcu
zainspirowaną ostatnim filmem Sariela. Drugi dłuższy pokazujący więcej szczegółów.
[youtube]http://www.youtube.com/watch?v=tdSUbgNKgXI[/youtube]
Długa wersja ze szczegółami.
[youtube]http://www.youtube.com/watch?v=doyIsFmAtlk[/youtube]
Trochę zdjęć z galerii








Więcej MOCy na moim kanale YouTube
Zaplanowałem sobie następujące funkcje:
Ręka- zginanie palców, obrót nadgarstka, zginanie w łokciu, podnoszenie ręki, obrót ręki.
Głowa- obrót głowy, wychylanie we wszystkich kierunkach.
Wiedziałem że najgorzej będzie z ramieniem a konkretnie z obrotnicą która wiele będzie musiała wytrzymać ale o tym później.
Dane techniczne:
Długość ramion – ok. 113 cm
Obwód klatki piersiowej – ok. 68 cm
Wysokość – 41 cm
Waga – 3 kg
12 silników PF medium
2 silniki PF XL
7 odbiorników IR
3 battery box
1 światła
Budowę robota rozpoczołem od dłoni zaciskanej dwoma małymi siłownikami śrubowymi. Palce w dłoni zginają się w sposób przypominający zaciskanie ludzkiej dłoni tworząc moim zdaniem zgrabną pięść. Siłowniki te są bardzo słabe więc usprzęgliłem je sprzęgłem 2,5 Nm czyli tym najsłabszym a i tak (czasami) jeden z nich lubił przepuszczać tracąc synchronizację z drugim. Obrót nadgarstka również jest usprzęglony i ograniczony w ruchu tak jak to się ma w ludzkim.

Staw łokciowy pracuje w zakresie ok. 90 stopni. Wychylają go dwa duże siłowniki śrubowe napędzane XL'em. Postawiłem na taką konfigurację aby uzyskać maksymalną prędkość wychylania
(przekładnia: z24-z8).
Pierwotnie ta część ręki była zupełnie inna. Dwa małe silniki były na przedramieniu aby ich ciężar maksymalnie przenieść bliżej ramienia. Dwa napędy przechodziły wówczas przez oś zginania łokcia. Chociaż wszystko było usprzęglone to jednak podczas zginania łokcia mechanizmy palców i nadgarstka przeszkadzały sobie w sposób dla mnie niedopuszczalny.
Ramię składa się z trzech dużych obrotnic, dwóch na stałe ze sobą połączonych i jednej która łączy rękę z korpusem. Obrotnica łącząca z uwagi na duże obciążenia rozrywające została dodatkowo wzmocniona po obu stronach cienkim liftarmem. Napędza ją mały silnik z wykorzystaniem ślimaka (przekładnia: knob-z24-ślimak).
Obrót ręki napędzany jest również małym silnikiem z podwójnym usprzęgleniem (przekładnia: z24-z12, podwójne z8 na podwójne sprzęgło z24, z16-ślimak, z24-z8, płaska z12-z36, podwójna z8 na podwójną obrotnicę). Druga ręka jest lustrzanym odbiciem pierwszej.

Korpus zachowuje według mnie zbliżone proporcje do rąk. Starałem się go maksymalnie wzmocnić i usztywnić oczywiście zachowując pełną funkcjonalność i kształt klatki piersiowej. Sercem korpusu są oczywiście trzy pakiety bateri, siedem wież IR oraz silniki. Cztery do ramion, piąty do obrotu głowy i szósty do przełączania pomiędzy pakietami. Wszystkie wieże z kablami umieściłem z tyłu dzięki czemu udało sią dość estetycznie moim zdaniem ukształtować klatkę piersiową.
Głowę budowałem na końcu dosłownie z resztek szarych części. Sam mechanizm poszedł dość łatwo choć na początku małe siłowniki były usprzęglone gumkami lego (odległość między silnikami umieszczonymi w głowie nie pozwalała na użycie sprzęgła z24). Sam mechanizm z gumkami działał bardzo dobrze ale po zbudowaniu reszty głowy nie dawał rady. W to miejsce zastosowałem zębatki z20 na płaską z12. Na filmie pewnie będzie słychać jak zgrzytają ale to raczej nie groźny kompromis dla słabiutkich siłowniczków. Głowa porusza się we wszystkich kierunkach dzięki trzem silnikom dając trochę efekt 3D. Dopuściłem się też małej ekstrawagancji jak na mnie i zabudowałem światła jako oczy.


MOC oceniam jako udany. Oczywiście nie jest to model filmowego terminatora a jedynie nazwa człekokształtnego robota. Udało mi się zbudować wszystko tak jak zaplanowałem choć chciałem żeby potrafił się czołgać by odegrać scenę z filmu gdy ginie pod prasą. Niestety ręce nie zginają się w trzeciej kluczowej płaszczyźnie. Wykonanie jej osobiście uważam za bardzo trudne i prawie niemożliwe ale kto wie.
Troche się napisałem i pewnie popełniłem mnóstwo błędów za które z góry przepraszam.
Dodaje dwa filmiki. Pierwszy krótki zrobiony specjalnie dla forumowiczów z małą scenką na końcu
zainspirowaną ostatnim filmem Sariela. Drugi dłuższy pokazujący więcej szczegółów.
[youtube]http://www.youtube.com/watch?v=tdSUbgNKgXI[/youtube]
Długa wersja ze szczegółami.
[youtube]http://www.youtube.com/watch?v=doyIsFmAtlk[/youtube]
Trochę zdjęć z galerii



Więcej MOCy na moim kanale YouTube