[MOC] Pagani Zonda
: 2012-09-02, 21:30
Skoro Pietruch wrócił do budowania, to ja też muszę :)

Dane techniczne:
Wymiary: dł. 61s / szer. 30s / wys. 18s + anteny
Waga: 1.996 kg
Napęd: 4 x silnik RC na wszystkie koła z przełożeniem 1:1
Zawieszenie: pełne niezależne
Silniki: 4 x RC, 1 x PF Medium
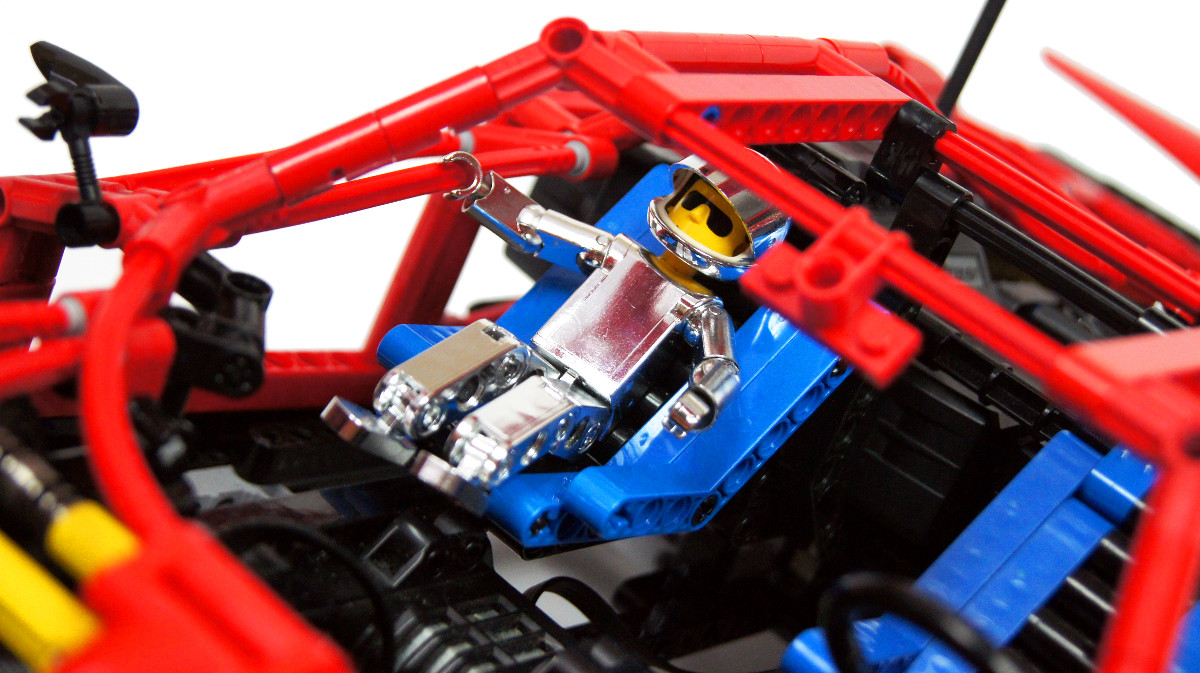
Pagani Zonda jest zdaniem niektórych bardziej zjawiskiem niż samochodem. Można nad tym dyskutować, ale z pewnością jest pojazdem bardzo niezwykłym i egzotycznym. Po pierwsze, łączy najbardziej zaawansowaną technologię podwozia i nadwozia z wnętrzem utrzymanym w stylistyce wczesnych samochodów rajdowych, gdzie kombinacja metalu, drewna i skóry pozwala się poczuć jak w latach 30-tych. Po drugie, każdy z bardzo niewielu egzemplarzy tego samochodu jest budowanie praktycznie w całości ręcznie (z silnikiem włącznie!). Rezultatem jest unikalne połączenie niesamowitych osiągów i uroku rękodzieła. A zrezygnowanie z produkcji seryjnej sprzyja majstrowaniu i ulepszaniu samochodu, do tego stopnia że producent wypuścił conajmniej 13 różnych wersji Zondy zanim wziął się na serio za inny model, którym jest Pagani Huayra (notabene, też oparta na Zondzie).

Do budowy modelu doszedłem nieco okrężną drogą - okazało się, że uzbierały mi się 4 silniki RC i że mogę tanio dostać drugi moduł RC żeby wykorzystać je wszystkie jednocześnie. Naturalną decyzją była budowa jakiegoś supercara z akcentem na prędkość. Padło na Zondę, bo jej długi tył nadwozia pozwalał łatwo zmieścić dwa moduły RC.
Model miał być ładny i szybki. To drugie pociągnęło za sobą uproszczenie bebechów i zbicie wagi jak najniżej. Żeby zrównoważyć ciężar silników i modułów RC, zdecydowałem się na ażurową karoserię stworzoną z samych krawędzi i wybranych detali. To narzuciło wykorzystanie elastycznych osi, a to z kolei zadecydowało o czerwonym kolorze karoserii. Żeby karoseria wyraźnie odcinała się od podwozia, pozwalając łatwo zobaczyć je "przez" nią, zbudowałem je niemal wyłącznie z czarnych części.
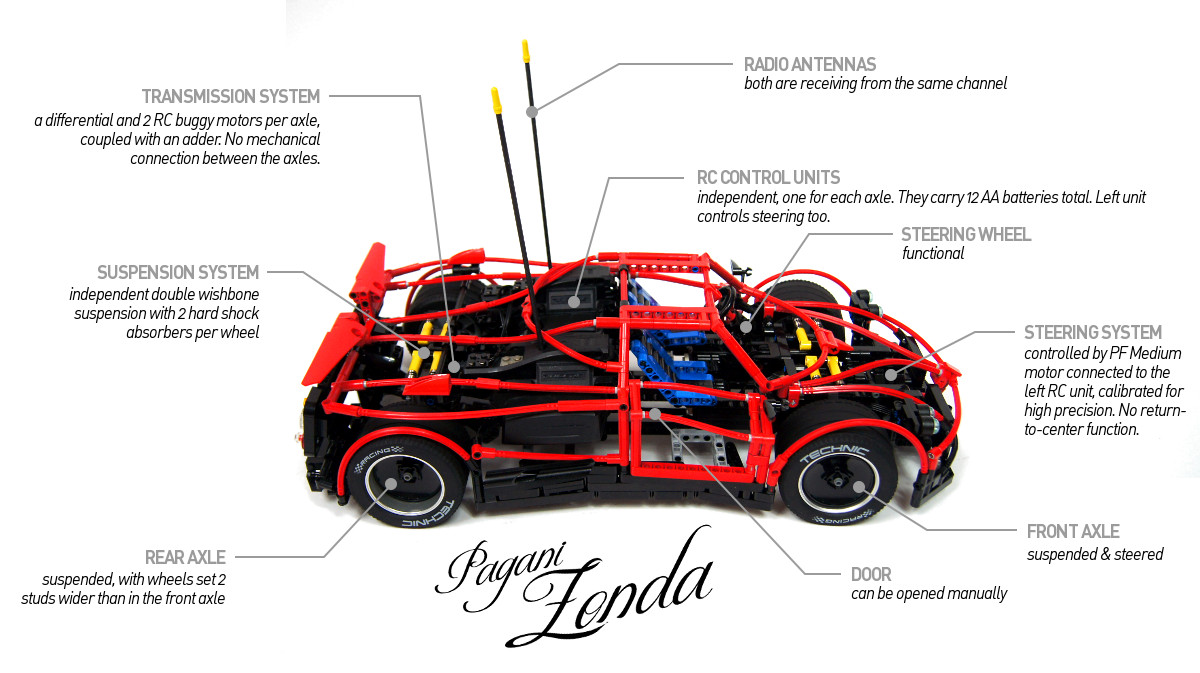
Układ napędowy składa się z dwóch par silników RC połączonych sumatorami z wolniejszych wyjść. Jedna para napędza przednią, druga tylną oś, i każda para kontrolowana jest przez osobny moduł RC. Oznacza to, że osie łączy tylko podwozie, bo silniki je napędzające są zasilane i sterowane osobno. Gdyby przestawić moduły RC na różne kanały, możnaby sterować każdą osią osobno.
Łatwo zauważyć, że w odróżnieniu do oryginału, model ma napęd na wszystkie koła zamiast tylko na tył. Powodem jest ilość silników: łatwiej je podzielić na przód i tył, zachowując dobre rozłożenie masy i proste przeniesienie napędu, niż połączyć wszystkie cztery i przekazywać ich łączną moc tylko na tylną oś. Rozłożenie tej mocy pozwala lepiej ją wykorzystać i zmniejsza ryzyko uszkodzenia części - które jest spore, bo kilka razy próbując hamować silnikami zmieliłem zębatki w tylnym dyferencjale.
Osie mają typowe zawieszenie niezależne, z poziomymi amortyzatorami i dyferencjałami pośrodku. Przednia oś jest sterowana silnikiem PF Medium znajdującym się przed nią, podłączonym do lewego modułu RC i obracającym również kierownicę. Model ma wbrew pozorom całkiem dobry promień skrętu, a kombinacja szerokich opon typu slick i dyferencjałów w napędzie sprawia, że prowadzi się bardzo dobrze. W oparciu o wcześniejsze doświadczenia, spowolniłem układ skrętny tak żeby pozwalał na bardzo delikatne poprawki, i zrezygnowałem z centrowania skrętu które więcej przeszkadza niż pomaga.
Przy użyciu świeżych, markowych baterii model ma naprawdę sporo mocy. Stąd przypuszczenie, że prędkość 15,4 km/h jaką udało mi się nim osiągnąć nie jest szczytem możliwości 4 silników RC - będę chciał dalej testować jakie możliwości dają inne koła, mniejsza waga czy skorzystanie z szybszych wyjść silników. Być może dobrym wyjściem jest skrzynia biegów, choć dotychczasowe doświadczenia mówią, że dodatkowa komplikacja układu przeniesienia napędu generuje straty praktycznie niwelujące zyski ze skrzyni.
Na koniec chciałbym podziękować niezawodnemu Aurimaxowi za ratunek z chromem, Smykowi za pomoc w filmowaniu i testowaniu podatności modelu na awarie :P oraz Mahjqa'owi za wymyślenie przednich świateł z clikitsów.
Galeria
Kilka fot:










I film:
[youtube]http://www.youtube.com/watch?v=DAMb7t1DyZ8[/youtube]

Dane techniczne:
Wymiary: dł. 61s / szer. 30s / wys. 18s + anteny
Waga: 1.996 kg
Napęd: 4 x silnik RC na wszystkie koła z przełożeniem 1:1
Zawieszenie: pełne niezależne
Silniki: 4 x RC, 1 x PF Medium
Pagani Zonda jest zdaniem niektórych bardziej zjawiskiem niż samochodem. Można nad tym dyskutować, ale z pewnością jest pojazdem bardzo niezwykłym i egzotycznym. Po pierwsze, łączy najbardziej zaawansowaną technologię podwozia i nadwozia z wnętrzem utrzymanym w stylistyce wczesnych samochodów rajdowych, gdzie kombinacja metalu, drewna i skóry pozwala się poczuć jak w latach 30-tych. Po drugie, każdy z bardzo niewielu egzemplarzy tego samochodu jest budowanie praktycznie w całości ręcznie (z silnikiem włącznie!). Rezultatem jest unikalne połączenie niesamowitych osiągów i uroku rękodzieła. A zrezygnowanie z produkcji seryjnej sprzyja majstrowaniu i ulepszaniu samochodu, do tego stopnia że producent wypuścił conajmniej 13 różnych wersji Zondy zanim wziął się na serio za inny model, którym jest Pagani Huayra (notabene, też oparta na Zondzie).
Do budowy modelu doszedłem nieco okrężną drogą - okazało się, że uzbierały mi się 4 silniki RC i że mogę tanio dostać drugi moduł RC żeby wykorzystać je wszystkie jednocześnie. Naturalną decyzją była budowa jakiegoś supercara z akcentem na prędkość. Padło na Zondę, bo jej długi tył nadwozia pozwalał łatwo zmieścić dwa moduły RC.
Model miał być ładny i szybki. To drugie pociągnęło za sobą uproszczenie bebechów i zbicie wagi jak najniżej. Żeby zrównoważyć ciężar silników i modułów RC, zdecydowałem się na ażurową karoserię stworzoną z samych krawędzi i wybranych detali. To narzuciło wykorzystanie elastycznych osi, a to z kolei zadecydowało o czerwonym kolorze karoserii. Żeby karoseria wyraźnie odcinała się od podwozia, pozwalając łatwo zobaczyć je "przez" nią, zbudowałem je niemal wyłącznie z czarnych części.
Układ napędowy składa się z dwóch par silników RC połączonych sumatorami z wolniejszych wyjść. Jedna para napędza przednią, druga tylną oś, i każda para kontrolowana jest przez osobny moduł RC. Oznacza to, że osie łączy tylko podwozie, bo silniki je napędzające są zasilane i sterowane osobno. Gdyby przestawić moduły RC na różne kanały, możnaby sterować każdą osią osobno.
Łatwo zauważyć, że w odróżnieniu do oryginału, model ma napęd na wszystkie koła zamiast tylko na tył. Powodem jest ilość silników: łatwiej je podzielić na przód i tył, zachowując dobre rozłożenie masy i proste przeniesienie napędu, niż połączyć wszystkie cztery i przekazywać ich łączną moc tylko na tylną oś. Rozłożenie tej mocy pozwala lepiej ją wykorzystać i zmniejsza ryzyko uszkodzenia części - które jest spore, bo kilka razy próbując hamować silnikami zmieliłem zębatki w tylnym dyferencjale.
Osie mają typowe zawieszenie niezależne, z poziomymi amortyzatorami i dyferencjałami pośrodku. Przednia oś jest sterowana silnikiem PF Medium znajdującym się przed nią, podłączonym do lewego modułu RC i obracającym również kierownicę. Model ma wbrew pozorom całkiem dobry promień skrętu, a kombinacja szerokich opon typu slick i dyferencjałów w napędzie sprawia, że prowadzi się bardzo dobrze. W oparciu o wcześniejsze doświadczenia, spowolniłem układ skrętny tak żeby pozwalał na bardzo delikatne poprawki, i zrezygnowałem z centrowania skrętu które więcej przeszkadza niż pomaga.
Przy użyciu świeżych, markowych baterii model ma naprawdę sporo mocy. Stąd przypuszczenie, że prędkość 15,4 km/h jaką udało mi się nim osiągnąć nie jest szczytem możliwości 4 silników RC - będę chciał dalej testować jakie możliwości dają inne koła, mniejsza waga czy skorzystanie z szybszych wyjść silników. Być może dobrym wyjściem jest skrzynia biegów, choć dotychczasowe doświadczenia mówią, że dodatkowa komplikacja układu przeniesienia napędu generuje straty praktycznie niwelujące zyski ze skrzyni.
Na koniec chciałbym podziękować niezawodnemu Aurimaxowi za ratunek z chromem, Smykowi za pomoc w filmowaniu i testowaniu podatności modelu na awarie :P oraz Mahjqa'owi za wymyślenie przednich świateł z clikitsów.
Galeria
Kilka fot:






I film:
[youtube]http://www.youtube.com/watch?v=DAMb7t1DyZ8[/youtube]