[MOC] Maszyna do Regeneracji Nawierzchni Drogowej
: 2014-09-21, 12:25
Kolejny MOC w mojej kolekcji z serii tych nietypowych to Road Reclaimer/Soil Stabilizer, czyli Maszyna do Regeneracji Nawierzchni Drogowej.

Prawdziwy pojazd służy do zrywania asfaltu z istniejącej drogi, może zagęszczać grunt (stabilizować) pod nową czy mieszać wszystkie składniki jak cement, piach dodając do tego wodę czy inne płynne substancje chemiczne.
Prezentowana maszyna nie jest kopią żadnej konkretnej istniejącej naprawdę, aczkolwiek wzorowałem się bardzo luźno na Bomag-u MPH 600, zwłaszcza w przedniej części.


Tylna część mocno odbiega od tego co można zobaczyć w prawdziwych maszynach, lecz w końcowej fazie budowy uznałem jednak, że zamiast manualnego sterowania funkcjami pneumatycznymi miło będzie dorzucić tam automatyczny kompresor, zdalnie sterowane zawory pneumatyczne, air tank czy manometr. Ale o tym później.

Dane techniczne:
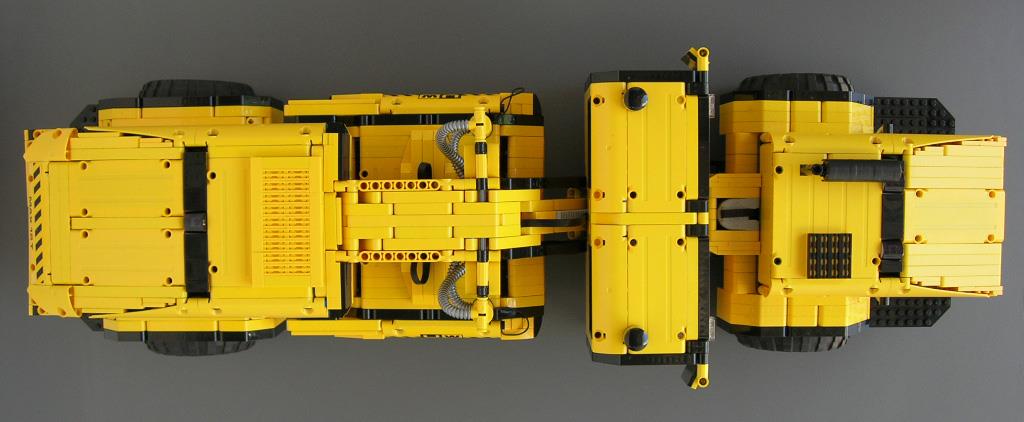
Długość: 90 studów - 72cm
Szerokość: 29 studów – 23cm
Wysokość (po podniesieniu kabiny): 28 studów – 22cm
Waga: 3400g
Silniki: 9 PF (1x XL, 4x Medium, 4x Servo Motor)
3x wieża IR, 4x swich PF, 1x światła LED, 5x przedłużacz 50cm, 1x przedłużacz 20cm
Zasilanie: 1x 8878
Pneumatyka:
3x duży siłownik, 1x mały siłownik, 2x pompka 5.5L, 1x air tank, 1x manometr, 3x swich pneumatyczny

Zaczynamy od początku czyli frontowa część. Tutaj mieści się cały zespół odpowiadający za napęd oraz skręt pojazdu. Centralnie w ramie zamocowany jest silnik XL. Ten połączony jest do przednich kół za pomocą dwubiegowej skrzyni opartej o driving ring o przełożeniach 1:1 oraz 1:1.66. Napęd doprowadzony jest tylko do przedniej osi z dyferencjałem. Koła w rozmiarze 94.8 osadzone są na zwolnicach z dodatkowym przełożeniem 1:3. Za skręt odpowiada tutaj servo motor połączony z obrotnicą. Zwykła duża obrotnica posiada wewnątrz 24 zęby. Na serwomotorze założona jest zębatka z8, a samo serwo znajduje się tuż nad wspomnianą obrotnicą. Dzięki temu mamy tutaj skręt podobny do tego jakie można spotkać w wodzidłach przegubowych. Przed skrzynią biegów znajduje się zasilanie – akumulator 8878. Za grillem schowane są reflektory z parą świateł LED włączanych przełącznikiem po lewej stronie kabiny.


Swich po prawej stronie służy do zmiany kierunku skrętu tylnych kół. Są do wyboru trzy tryby pracy:
1. Skręt przeciwnie do przedniej osi
2. Koła wyprostowane (brak skrętu)
3. Skręt zgodnie z przednią osią

Przy pierwszym położeniu cała maszyna ma bardzo małą średnicę zawracania.
W prawdziwej maszynie również występuje ten system, wspomagając np. manewrowanie na placu parkingowym czy umożliwiając nawrót na wąskiej remontowanej drodze.
Pozycja druga – neutralna. Jest to normalna pozycja pracy. Promień skrętu jest tutaj duży, lecz jeżeli maszyna jedzie nawet po łuku drogi którą aktualnie się zajmuje promień ten jest w zupełności wystarczający.
Pozycja trzecia, ostatnia. W tym trybie pojazd jedzie tzw. krabem. Umożliwia to np. zrywanie asfaltu pod kątem do osi jezdni.
Szczerze powiedziawszy nie mam pojęcia, czy w prawdziwej maszynie występuje taki tryb pracy (nigdzie nie doszukałem się takich zdjęć czy informacji), natomiast pozycja ta wyszła nijako sama z siebie po podłączeniu przełącznika.
Co ciekawe gdy mamy skręconą przednią oś o dany kąt i przełącznik tylnego serwa jest w pozycji „0”, po włączeniu go tylna oś (a właściwie drugi serwomotor) ustawia się pod tym samym kątem co pierwszy. Także mamy możliwość przełączania się pomiędzy trybami pracy w dowolnym momencie.
Na samej górze przedniej części obok rury wydechowej umieszczone są dwie wieże IR.
Zaraz za nosem pojazdu znajduje się kabina operatora(ów).


Ta oprócz otwieranych drzwi w środku dysponuje dwoma fotelami z drążkami do sterowania. Po środku kabiny zamontowany jest silnik M, który służy podnoszeniu całej kabiny by zapewnić lepszą widoczność podczas pracy.

Zastosowałem w nim redukcję na ślimaku by kabina podnosiła się jak najwolniej oraz nie „skakała” przy opuszczaniu (co wystąpiło gdy prędkość obrotowa była zbyt duża). Dodatkowo by uniknąć strzelania zębatek w granicznych pozycjach zastosowałem sprzęgło.
Mechanizm podnoszenia i opuszczania zastosowany jest ze względów transportowych. Pojazd z opuszczoną kabiną jest niemal płaski i łatwiej go przetransportować pod różnymi niskimi konstrukcjami (jak mosty, tunele, konstrukcje na placach budowy) niż gdyby kabina była nieruchoma.

Drugi plus to widoczność. Podniesiona kabina zdecydowanie ułatwia pracę, ponieważ operator jest w stanie dostrzec wszystko dookoła.
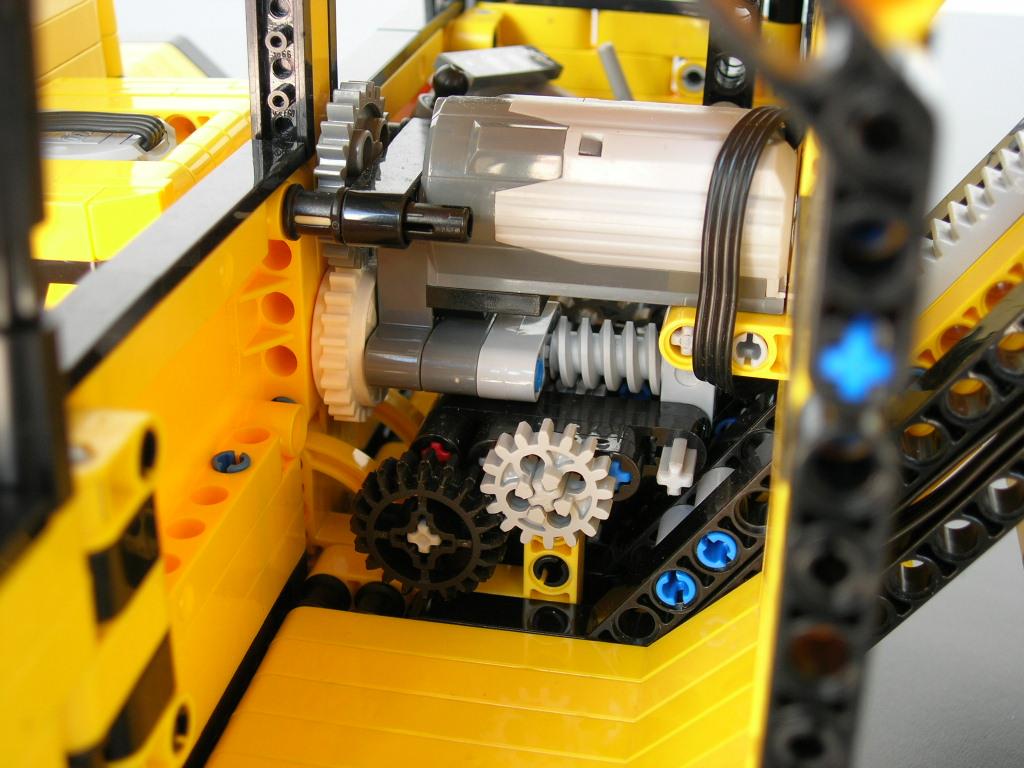
Kolejnym i najważniejszym elementem całej maszyny są wirniki.

Tutaj również w zależności od producenta są maszyny jedno i wielowirnikowe. Ja zdecydowałem się na trzy. Napędzane są łańcuchem poprzez dwa silniki M umieszczone na samej górze korpusu. Pierwszy i ostatni wirnik kręci się w tym samym kierunku, środkowy - w przeciwnym. Dzięki temu nawet moja maszyna jest w stanie coś zagęścić :)

Korpus w którym umieszczone są wirniki jest zabudowany z każdej strony, a jego przednia i tylna część może się dodatkowo otwierać gdy potrzeba by do jej „paszczy” weszło trochę więcej materiału. Ta czynność jest manualna. Potrzeba kręcić czarną zębatką na samej górze by zamknąć/otworzyć pokrywy.

Cały korpus z wirnikami i silnikami umieszczony jest na trzech siłownikach pneumatycznych, które umożliwiają mu ruch w pionie.

Dwa siłowniki umieszczone są w górnej części maszyny, trzeci jest schowany przy tylnej osi, a korpus połączony jest z nim dźwignią. System pneumatyczny podzielony jest na dwa obwody ( oba siłowniki górne + jeden dolny) gdzie każdy z nich jest osobno sterowany. Dzięki temu mamy możliwość ustawienia wirników pod odpowiednim kątem.

Przykładowo takie ustawienie używane jest w przypadku potrzeby zdarcia wysokiej nawierzchni asfaltowej, gdzie wskazane jest podejść do niej pod kątem by niczego nie uszkodzić.
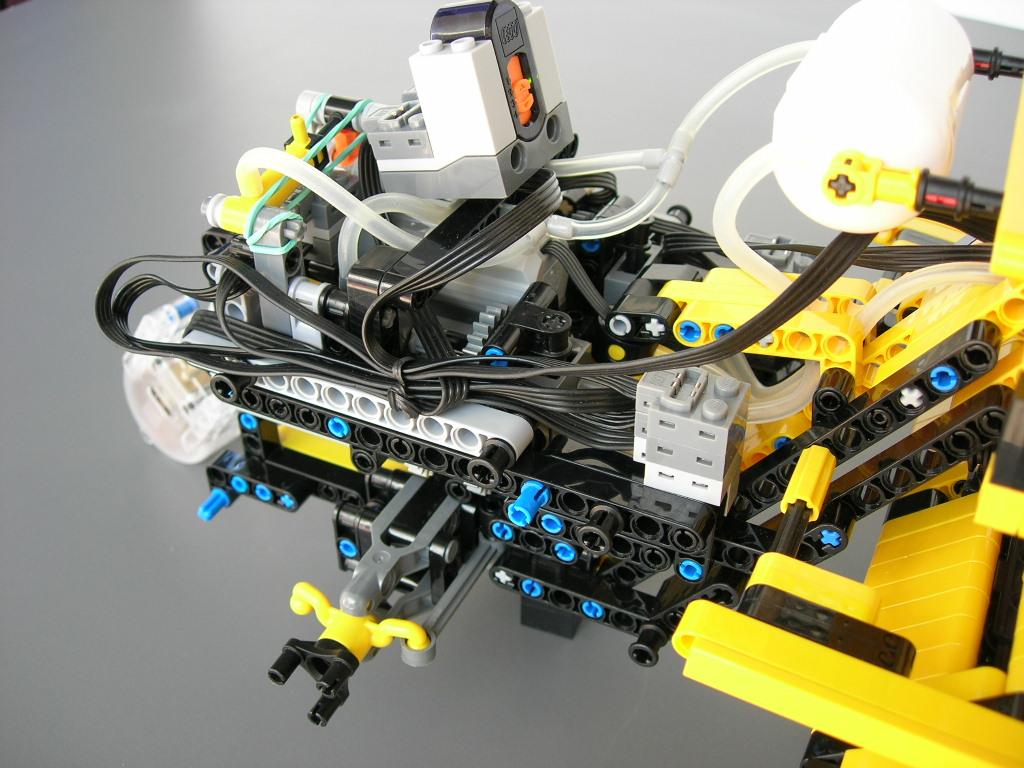
W tylnej części maszyny umieszczony jest wspomniany siłownik pneumatyczny, omówione również wcześniej serwo skrętu oraz dwa elektrozawory do sterowania siłownikami pneumatycznymi.

Nie będę ukrywał, iż idee na schemat połączenia swicha z serwem podpatrzyłem w koparce Żbika. Zgłębiając wiedzę na temat tego rozwiązania znalazłem na Brickshelfie galerię z instrukcją jak zbudować ten element i finalnie zmodyfikowałem całą konstrukcję tak by pasowała do moich założeń.
Schemat jest prosty, swich pneumatyczny + serwomotor + odpowiednia redukcja zębatkami. I tutaj moja wizja rożni się trochę od schematu z BS-a. Ja potrzebowałem większego wychylenia swicha pneumatycznego (więcej powietrza) więc zmieniłem zębatki na mi odpowiadające oraz przebudowałem całe mocowanie tak by zmieściło się do maszyny.
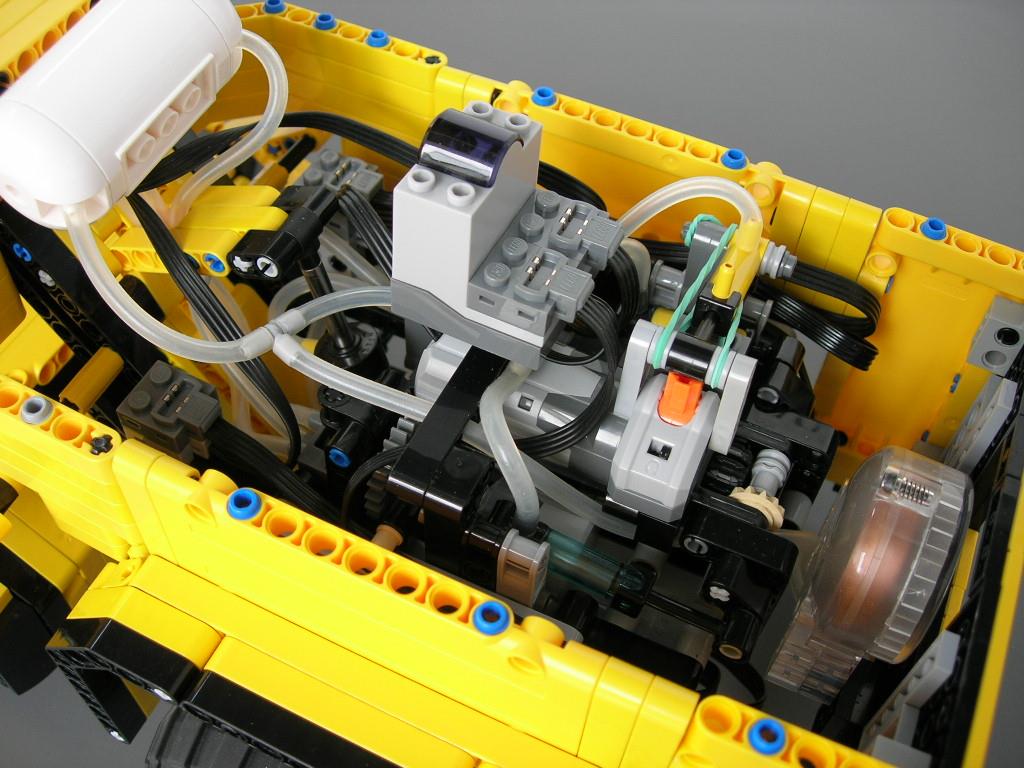
I nie będę ukrywał też, że te elektrozawory były pretekstem do powiększenia kupra pojazdu. No bo gdzieś to trzeba zmieścić, a zabawa jest dużo lepsza niż manualne otwieranie, zamykanie i pompowanie pompką.



Oprócz trzech serw z tyłu jest jeszcze silnik M który napędza kompresor. Do pompowania powietrza służą dwie pompki 5.5L a jego pracę kontroluje dobrze znany na forum wyłącznik ciśnieniowy na bazie swicha PF oraz małego siłownika pneumatycznego z gumką recepturką.
Skompresowane powietrze magazynowane jest w air tanku, a ciśnienie docelowe przy którym następuje wyłączenie ustawione jest na ok. 1.8 bara. Z tyłu również jest jedna wieża IR odpowiadająca właśnie za dwa opisane elektrozawory. Chciałem upchnąć z przodu ale się już nie mieściła…



Ogółem myślę, że mogło by być lepiej. Są miejsca gdzie można by jeszcze trochę popracować nad estetyką (zwłaszcza tylna część bo kończyłem ją już „na szybko”), może poprawić właściwości jezdne. Na działanie modelu też nie narzekam, wszystko pracuje jak pierwotnie zakładałem. Tu i ówdzie postanowiłem przykleić kilka naklejek by urozmaicić wygląd całego pojazdu. Model budowany jest jednak w stylu Technic więc proszę mi tutaj nie narzekać na zbyt duża liczbę dziur, tak ma być :).


FILM:
https://www.youtube.com/watch?v=yGIHteQjHRo
Z mojej strony to na tyle.

Prawdziwy pojazd służy do zrywania asfaltu z istniejącej drogi, może zagęszczać grunt (stabilizować) pod nową czy mieszać wszystkie składniki jak cement, piach dodając do tego wodę czy inne płynne substancje chemiczne.
Prezentowana maszyna nie jest kopią żadnej konkretnej istniejącej naprawdę, aczkolwiek wzorowałem się bardzo luźno na Bomag-u MPH 600, zwłaszcza w przedniej części.


Tylna część mocno odbiega od tego co można zobaczyć w prawdziwych maszynach, lecz w końcowej fazie budowy uznałem jednak, że zamiast manualnego sterowania funkcjami pneumatycznymi miło będzie dorzucić tam automatyczny kompresor, zdalnie sterowane zawory pneumatyczne, air tank czy manometr. Ale o tym później.

Dane techniczne:
Długość: 90 studów - 72cm
Szerokość: 29 studów – 23cm
Wysokość (po podniesieniu kabiny): 28 studów – 22cm
Waga: 3400g
Silniki: 9 PF (1x XL, 4x Medium, 4x Servo Motor)
3x wieża IR, 4x swich PF, 1x światła LED, 5x przedłużacz 50cm, 1x przedłużacz 20cm
Zasilanie: 1x 8878
Pneumatyka:
3x duży siłownik, 1x mały siłownik, 2x pompka 5.5L, 1x air tank, 1x manometr, 3x swich pneumatyczny

Zaczynamy od początku czyli frontowa część. Tutaj mieści się cały zespół odpowiadający za napęd oraz skręt pojazdu. Centralnie w ramie zamocowany jest silnik XL. Ten połączony jest do przednich kół za pomocą dwubiegowej skrzyni opartej o driving ring o przełożeniach 1:1 oraz 1:1.66. Napęd doprowadzony jest tylko do przedniej osi z dyferencjałem. Koła w rozmiarze 94.8 osadzone są na zwolnicach z dodatkowym przełożeniem 1:3. Za skręt odpowiada tutaj servo motor połączony z obrotnicą. Zwykła duża obrotnica posiada wewnątrz 24 zęby. Na serwomotorze założona jest zębatka z8, a samo serwo znajduje się tuż nad wspomnianą obrotnicą. Dzięki temu mamy tutaj skręt podobny do tego jakie można spotkać w wodzidłach przegubowych. Przed skrzynią biegów znajduje się zasilanie – akumulator 8878. Za grillem schowane są reflektory z parą świateł LED włączanych przełącznikiem po lewej stronie kabiny.


Swich po prawej stronie służy do zmiany kierunku skrętu tylnych kół. Są do wyboru trzy tryby pracy:
1. Skręt przeciwnie do przedniej osi
2. Koła wyprostowane (brak skrętu)
3. Skręt zgodnie z przednią osią

Przy pierwszym położeniu cała maszyna ma bardzo małą średnicę zawracania.
W prawdziwej maszynie również występuje ten system, wspomagając np. manewrowanie na placu parkingowym czy umożliwiając nawrót na wąskiej remontowanej drodze.
Pozycja druga – neutralna. Jest to normalna pozycja pracy. Promień skrętu jest tutaj duży, lecz jeżeli maszyna jedzie nawet po łuku drogi którą aktualnie się zajmuje promień ten jest w zupełności wystarczający.
Pozycja trzecia, ostatnia. W tym trybie pojazd jedzie tzw. krabem. Umożliwia to np. zrywanie asfaltu pod kątem do osi jezdni.
Szczerze powiedziawszy nie mam pojęcia, czy w prawdziwej maszynie występuje taki tryb pracy (nigdzie nie doszukałem się takich zdjęć czy informacji), natomiast pozycja ta wyszła nijako sama z siebie po podłączeniu przełącznika.
Co ciekawe gdy mamy skręconą przednią oś o dany kąt i przełącznik tylnego serwa jest w pozycji „0”, po włączeniu go tylna oś (a właściwie drugi serwomotor) ustawia się pod tym samym kątem co pierwszy. Także mamy możliwość przełączania się pomiędzy trybami pracy w dowolnym momencie.
Na samej górze przedniej części obok rury wydechowej umieszczone są dwie wieże IR.
Zaraz za nosem pojazdu znajduje się kabina operatora(ów).


Ta oprócz otwieranych drzwi w środku dysponuje dwoma fotelami z drążkami do sterowania. Po środku kabiny zamontowany jest silnik M, który służy podnoszeniu całej kabiny by zapewnić lepszą widoczność podczas pracy.
Zastosowałem w nim redukcję na ślimaku by kabina podnosiła się jak najwolniej oraz nie „skakała” przy opuszczaniu (co wystąpiło gdy prędkość obrotowa była zbyt duża). Dodatkowo by uniknąć strzelania zębatek w granicznych pozycjach zastosowałem sprzęgło.
Mechanizm podnoszenia i opuszczania zastosowany jest ze względów transportowych. Pojazd z opuszczoną kabiną jest niemal płaski i łatwiej go przetransportować pod różnymi niskimi konstrukcjami (jak mosty, tunele, konstrukcje na placach budowy) niż gdyby kabina była nieruchoma.

Drugi plus to widoczność. Podniesiona kabina zdecydowanie ułatwia pracę, ponieważ operator jest w stanie dostrzec wszystko dookoła.
Kolejnym i najważniejszym elementem całej maszyny są wirniki.

Tutaj również w zależności od producenta są maszyny jedno i wielowirnikowe. Ja zdecydowałem się na trzy. Napędzane są łańcuchem poprzez dwa silniki M umieszczone na samej górze korpusu. Pierwszy i ostatni wirnik kręci się w tym samym kierunku, środkowy - w przeciwnym. Dzięki temu nawet moja maszyna jest w stanie coś zagęścić :)

Korpus w którym umieszczone są wirniki jest zabudowany z każdej strony, a jego przednia i tylna część może się dodatkowo otwierać gdy potrzeba by do jej „paszczy” weszło trochę więcej materiału. Ta czynność jest manualna. Potrzeba kręcić czarną zębatką na samej górze by zamknąć/otworzyć pokrywy.

Cały korpus z wirnikami i silnikami umieszczony jest na trzech siłownikach pneumatycznych, które umożliwiają mu ruch w pionie.

Dwa siłowniki umieszczone są w górnej części maszyny, trzeci jest schowany przy tylnej osi, a korpus połączony jest z nim dźwignią. System pneumatyczny podzielony jest na dwa obwody ( oba siłowniki górne + jeden dolny) gdzie każdy z nich jest osobno sterowany. Dzięki temu mamy możliwość ustawienia wirników pod odpowiednim kątem.

Przykładowo takie ustawienie używane jest w przypadku potrzeby zdarcia wysokiej nawierzchni asfaltowej, gdzie wskazane jest podejść do niej pod kątem by niczego nie uszkodzić.
W tylnej części maszyny umieszczony jest wspomniany siłownik pneumatyczny, omówione również wcześniej serwo skrętu oraz dwa elektrozawory do sterowania siłownikami pneumatycznymi.
Nie będę ukrywał, iż idee na schemat połączenia swicha z serwem podpatrzyłem w koparce Żbika. Zgłębiając wiedzę na temat tego rozwiązania znalazłem na Brickshelfie galerię z instrukcją jak zbudować ten element i finalnie zmodyfikowałem całą konstrukcję tak by pasowała do moich założeń.
Schemat jest prosty, swich pneumatyczny + serwomotor + odpowiednia redukcja zębatkami. I tutaj moja wizja rożni się trochę od schematu z BS-a. Ja potrzebowałem większego wychylenia swicha pneumatycznego (więcej powietrza) więc zmieniłem zębatki na mi odpowiadające oraz przebudowałem całe mocowanie tak by zmieściło się do maszyny.
I nie będę ukrywał też, że te elektrozawory były pretekstem do powiększenia kupra pojazdu. No bo gdzieś to trzeba zmieścić, a zabawa jest dużo lepsza niż manualne otwieranie, zamykanie i pompowanie pompką.


Oprócz trzech serw z tyłu jest jeszcze silnik M który napędza kompresor. Do pompowania powietrza służą dwie pompki 5.5L a jego pracę kontroluje dobrze znany na forum wyłącznik ciśnieniowy na bazie swicha PF oraz małego siłownika pneumatycznego z gumką recepturką.
Skompresowane powietrze magazynowane jest w air tanku, a ciśnienie docelowe przy którym następuje wyłączenie ustawione jest na ok. 1.8 bara. Z tyłu również jest jedna wieża IR odpowiadająca właśnie za dwa opisane elektrozawory. Chciałem upchnąć z przodu ale się już nie mieściła…



Ogółem myślę, że mogło by być lepiej. Są miejsca gdzie można by jeszcze trochę popracować nad estetyką (zwłaszcza tylna część bo kończyłem ją już „na szybko”), może poprawić właściwości jezdne. Na działanie modelu też nie narzekam, wszystko pracuje jak pierwotnie zakładałem. Tu i ówdzie postanowiłem przykleić kilka naklejek by urozmaicić wygląd całego pojazdu. Model budowany jest jednak w stylu Technic więc proszę mi tutaj nie narzekać na zbyt duża liczbę dziur, tak ma być :).

FILM:
https://www.youtube.com/watch?v=yGIHteQjHRo
Z mojej strony to na tyle.