[MOC] Diwheel
: 2008-09-16, 11:14
Z cyklu "pojazdy zakręcone"...
Diwheel
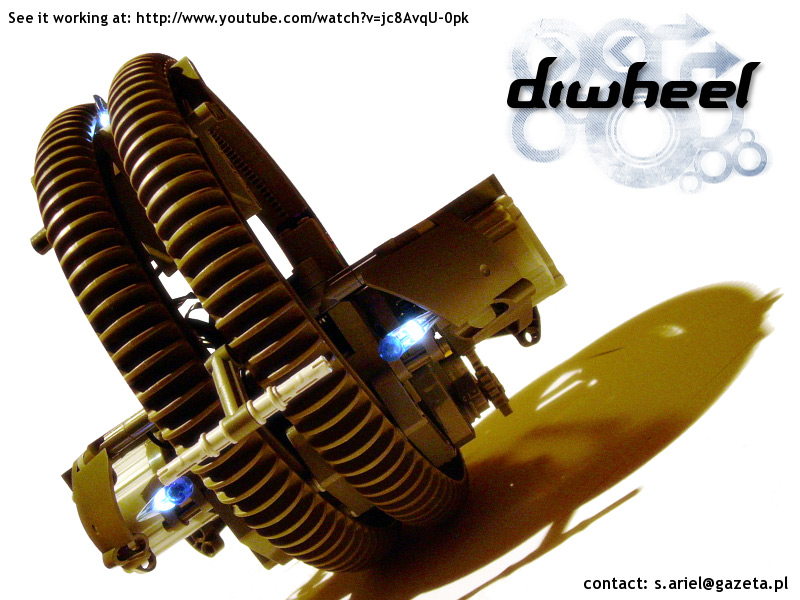
Dane techniczne:
Waga: 840 g
Wymiary: średnica 25 studów, szerokość 22 study
Napęd: 2 x PF XL przez subtraktor
Tak, dobrze widzicie - pojazd wewnątrz kół, nie dotykający ziemi niczym poza kołami i utrzymujący pozycję w ich wnętrzu tylko ciężarem. Pomysł wziął się z monowheeli, pojazdów których idea jest realizowana na różne sposoby od półtora wieku, dłużej niż koncepcja samochodu. Nie będę się rozpisywał bo świetną stronę o tych pojazdach znajdziecie tutaj, a przykładowy współczesny monowheel wygląda tak:

Marzyło mi się zbudowanie monowheela stabilizowanego żyroskopem. Niestety, po kilku eksperymentach i głębszej lekturze E. Britanniki, dowiedziałem się że nie da się mechanicznie przenieść stabilności żyroskopu na pojazd, w grę wchodzi tylko elektronika. O wykorzystaniu efektu żyroskopowego samego koła napędowego, jak w prawdziwych monowheelach, też raczej mowy nie było - w żyroskopach z rotorem średnicy 10 studów jako taką stabilność uzyskiwałem przy ok. 1300 obrotów na minutę. Nie wiem jaka prędkość byłaby potrzebna dla 25-studowego koła (policzyłbym, ale poległem na wzorze na moment pędu), ale pewnie niemała, a o całkowitej stabilności i tak nie byłoby mowy ze względu na zjawisko precesji żyroskopu, które w prawdziwym pojeździe kierowca może łagodzić balansując ciałem.
Zdecydowałem się więc na pojazd dwukołowy, a więc coś co nazywa się diwheel. Ponownie, świetna strona o takich pojazdach jest tutaj. Żeby jednak nie iść na łatwiznę i nie zbudować Hailfire Droida bis, ustawiłem oba koła tuż obok siebie, łącząc stabilność diwheela z (prawie) wyglądem i (prawie) konstrukcją monowheela.
Dużym problemem był wygląd. O wiernym funkcjonalnym modelu nie było mowy, bo raz że silniki używane w rzeczywistości są niewielkie ( w skali kół z Hailfire Droida to coś między micromotorem a PF Mediumem), a dwa że prawdziwe pojazdy wyważa się z uwzględnieniem masy kierowcy. Tzn. pojazd osiąga właściwą pozycję w kole dopiero kiedy ktoś posadzi na nim tyłek, pusty jest przekrzywiony. Nie pociągała mnie wizja ani budowania ludzikopodobnego balastu, ani jeżdżenia przekrzywionym diwheelem w imię realizmu. Poza tym w środku zostało znacznie miejsca na kierowcę niż w rzeczywistości (nawet w monowheelu z silnikiem V8 bebechy zajmują jakąś 1/3 wnętrza koła), a Pan Puszysty ostatnio przytył ;)
Koniec końców wyszło coś ufopodobnego. Użyłem tylko paneli żeby wystające silniki lepiej wtopić w sylwetkę, i świateł żeby jakoś zróżnicować przód i tył. Zastanawiałem się czy nie zaszaleć i nie trzasnąć jakiegoś czołgu, ale wydało mi się to głupim pomysłem - nie dość że musiałby być podobny do Hailfire'a, to jeszcze pomysł konwencjonalnego działa na okrągłym pojeździe jest, hmm, egzotyczny.
Co do funkcji - najprościej byłoby oczywiście podpiąć po silniku do koła i cieszyć się jazdą. Z jednym ale - koła są tak blisko siebie, że bardzo mała różnica prędkości między nimi daje ostry skręt. Gdybym więc sterował nimi niezależnie, musiałyby obracać się wolno i w rezultacie cały pojazd byłby wolny. Oczywistym rozwiązaniem na taki problem jest subtraktor. Wersja której używałem w czołgach była za długa, opracowałem nową:
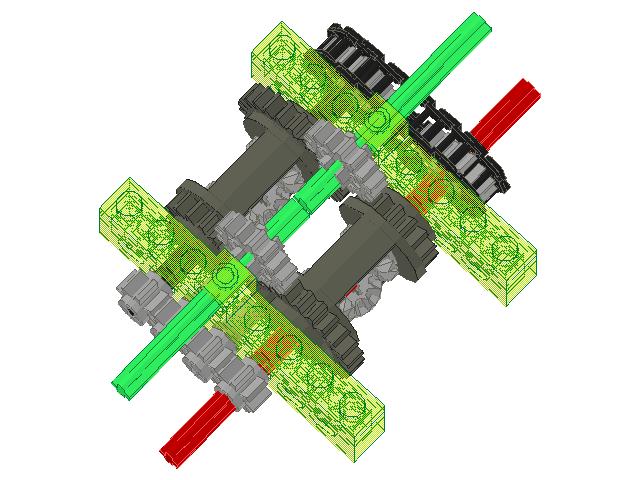
Ta wersja wygląda dość prosto, więc postaram się wyjaśnić jej działanie. Liczę że może przyda się Dmacowi, który zgłaszał zastrzeżenia do poprzedniej, i może zainspiruje naszego czołowego gąsienicowca, V1, do czegoś skomplikowanego :)
Na rysunku powyżej zielone półosie to inputy, czerwone to outputy. Dyferencjały są ustawione tak, że każdy z nich napędza osobny silnik. Dyferencjał po prawej napędza bezpośrednio koła, więc jak łatwo się domyślić napędzanie go pozwala jeździć przód / tył. Dyferencjał po lewej jest z nim połączony półosiami, każdą z innym układem zębatek. Z jednej strony mamy cztery z8, z drugiej dwie z16 z łańcuchem. Takie ustawienie pozwala przekazywać napęd z prawego dyfra w odwrotnych kierunkach dla obu półosi - czyli kiedy prawy dyfer się obraca, lewy stoi w miejscu, kręci się tylko środkowa zębatka w jego wnętrzu. Jeśli teraz zaczniemy obracać go drugim silnikiem, to jedna z jego półosi przyspieszy, druga zwolni. Ta rożnica prędkości zostanie przekazana na koła bez zakłócania pracy pierwszego silnika, a nawet podczas gdy on nie pracuje - wtedy możemy skręcać w miejscu. I to zasadniczo cała filozofia działania subtraktora.
Subtraktor, oprócz swojej głównej zalety czyli łatwego sterowania i możliwości skręcania podczas jazdy, pozwolił użyć innego przełożenia przy każdym silniku. Silnik napędowy jest trzykrotnie przyspieszony, silnik do skrętu trzykrotnie zredukowany. Użyłem PF XLi z obawy, że słabsze silniki przy takiej różnicy zaczną napędzać się nawzajem.
Diwheelem jeździ się całkiem przyjemnie, mimo fatalnej przyczepności kół. Nie sprawia to problemów przy ruszaniu i zatrzymywaniu, ale powoduje lekką bezwładność w skręcaniu na gładkiej podłodze. Na filmie zobaczycie, jak zachowuje się pojazd na klepkach i na dywanie.
Całość jest stabilna, nawet bez zabezpieczających "zderzaków" z tyłu i z przodu nie udało mi się przekręcić środka pojazdu. Generalnie im więcej manewrów, zatrzymań i ruszeń się wykonuje, tym bardziej środek się buja, ale przy jeździe na wprost szybko przestaje. Na końcu filmu znajdują się też ujęcia z kamery zamontowanej na pojeździe. Przy okazji wyszło jak ważna jest kwestia wyważenia - sam diwheel jeździ prosto i stabilnie, ale po dodaniu z jednej strony wysięgnika z kamerką, zaczął w tę stronę znosić.

GALERIA
Przykładowe zdjęcia:





I film:
[youtube]http://www.youtube.com/watch?v=jc8AvqU-0pk[/youtube]
Diwheel
Dane techniczne:
Waga: 840 g
Wymiary: średnica 25 studów, szerokość 22 study
Napęd: 2 x PF XL przez subtraktor
Tak, dobrze widzicie - pojazd wewnątrz kół, nie dotykający ziemi niczym poza kołami i utrzymujący pozycję w ich wnętrzu tylko ciężarem. Pomysł wziął się z monowheeli, pojazdów których idea jest realizowana na różne sposoby od półtora wieku, dłużej niż koncepcja samochodu. Nie będę się rozpisywał bo świetną stronę o tych pojazdach znajdziecie tutaj, a przykładowy współczesny monowheel wygląda tak:
Marzyło mi się zbudowanie monowheela stabilizowanego żyroskopem. Niestety, po kilku eksperymentach i głębszej lekturze E. Britanniki, dowiedziałem się że nie da się mechanicznie przenieść stabilności żyroskopu na pojazd, w grę wchodzi tylko elektronika. O wykorzystaniu efektu żyroskopowego samego koła napędowego, jak w prawdziwych monowheelach, też raczej mowy nie było - w żyroskopach z rotorem średnicy 10 studów jako taką stabilność uzyskiwałem przy ok. 1300 obrotów na minutę. Nie wiem jaka prędkość byłaby potrzebna dla 25-studowego koła (policzyłbym, ale poległem na wzorze na moment pędu), ale pewnie niemała, a o całkowitej stabilności i tak nie byłoby mowy ze względu na zjawisko precesji żyroskopu, które w prawdziwym pojeździe kierowca może łagodzić balansując ciałem.
Zdecydowałem się więc na pojazd dwukołowy, a więc coś co nazywa się diwheel. Ponownie, świetna strona o takich pojazdach jest tutaj. Żeby jednak nie iść na łatwiznę i nie zbudować Hailfire Droida bis, ustawiłem oba koła tuż obok siebie, łącząc stabilność diwheela z (prawie) wyglądem i (prawie) konstrukcją monowheela.
Dużym problemem był wygląd. O wiernym funkcjonalnym modelu nie było mowy, bo raz że silniki używane w rzeczywistości są niewielkie ( w skali kół z Hailfire Droida to coś między micromotorem a PF Mediumem), a dwa że prawdziwe pojazdy wyważa się z uwzględnieniem masy kierowcy. Tzn. pojazd osiąga właściwą pozycję w kole dopiero kiedy ktoś posadzi na nim tyłek, pusty jest przekrzywiony. Nie pociągała mnie wizja ani budowania ludzikopodobnego balastu, ani jeżdżenia przekrzywionym diwheelem w imię realizmu. Poza tym w środku zostało znacznie miejsca na kierowcę niż w rzeczywistości (nawet w monowheelu z silnikiem V8 bebechy zajmują jakąś 1/3 wnętrza koła), a Pan Puszysty ostatnio przytył ;)
Koniec końców wyszło coś ufopodobnego. Użyłem tylko paneli żeby wystające silniki lepiej wtopić w sylwetkę, i świateł żeby jakoś zróżnicować przód i tył. Zastanawiałem się czy nie zaszaleć i nie trzasnąć jakiegoś czołgu, ale wydało mi się to głupim pomysłem - nie dość że musiałby być podobny do Hailfire'a, to jeszcze pomysł konwencjonalnego działa na okrągłym pojeździe jest, hmm, egzotyczny.
Co do funkcji - najprościej byłoby oczywiście podpiąć po silniku do koła i cieszyć się jazdą. Z jednym ale - koła są tak blisko siebie, że bardzo mała różnica prędkości między nimi daje ostry skręt. Gdybym więc sterował nimi niezależnie, musiałyby obracać się wolno i w rezultacie cały pojazd byłby wolny. Oczywistym rozwiązaniem na taki problem jest subtraktor. Wersja której używałem w czołgach była za długa, opracowałem nową:
Ta wersja wygląda dość prosto, więc postaram się wyjaśnić jej działanie. Liczę że może przyda się Dmacowi, który zgłaszał zastrzeżenia do poprzedniej, i może zainspiruje naszego czołowego gąsienicowca, V1, do czegoś skomplikowanego :)
Na rysunku powyżej zielone półosie to inputy, czerwone to outputy. Dyferencjały są ustawione tak, że każdy z nich napędza osobny silnik. Dyferencjał po prawej napędza bezpośrednio koła, więc jak łatwo się domyślić napędzanie go pozwala jeździć przód / tył. Dyferencjał po lewej jest z nim połączony półosiami, każdą z innym układem zębatek. Z jednej strony mamy cztery z8, z drugiej dwie z16 z łańcuchem. Takie ustawienie pozwala przekazywać napęd z prawego dyfra w odwrotnych kierunkach dla obu półosi - czyli kiedy prawy dyfer się obraca, lewy stoi w miejscu, kręci się tylko środkowa zębatka w jego wnętrzu. Jeśli teraz zaczniemy obracać go drugim silnikiem, to jedna z jego półosi przyspieszy, druga zwolni. Ta rożnica prędkości zostanie przekazana na koła bez zakłócania pracy pierwszego silnika, a nawet podczas gdy on nie pracuje - wtedy możemy skręcać w miejscu. I to zasadniczo cała filozofia działania subtraktora.
Subtraktor, oprócz swojej głównej zalety czyli łatwego sterowania i możliwości skręcania podczas jazdy, pozwolił użyć innego przełożenia przy każdym silniku. Silnik napędowy jest trzykrotnie przyspieszony, silnik do skrętu trzykrotnie zredukowany. Użyłem PF XLi z obawy, że słabsze silniki przy takiej różnicy zaczną napędzać się nawzajem.
Diwheelem jeździ się całkiem przyjemnie, mimo fatalnej przyczepności kół. Nie sprawia to problemów przy ruszaniu i zatrzymywaniu, ale powoduje lekką bezwładność w skręcaniu na gładkiej podłodze. Na filmie zobaczycie, jak zachowuje się pojazd na klepkach i na dywanie.
Całość jest stabilna, nawet bez zabezpieczających "zderzaków" z tyłu i z przodu nie udało mi się przekręcić środka pojazdu. Generalnie im więcej manewrów, zatrzymań i ruszeń się wykonuje, tym bardziej środek się buja, ale przy jeździe na wprost szybko przestaje. Na końcu filmu znajdują się też ujęcia z kamery zamontowanej na pojeździe. Przy okazji wyszło jak ważna jest kwestia wyważenia - sam diwheel jeździ prosto i stabilnie, ale po dodaniu z jednej strony wysięgnika z kamerką, zaczął w tę stronę znosić.
GALERIA
Przykładowe zdjęcia:
I film:
[youtube]http://www.youtube.com/watch?v=jc8AvqU-0pk[/youtube]
